

ДВС 12 (тема 24 продолжение).ppt
- Количество слайдов: 31
 Зависимые подвески на продольных полуэллиптических рессорах просты по конструкции. Они не нуждаются в направляющем аппарате, так как его роль выполняют сами рессоры и балка моста. Однако их существенными недостатками являются: 1) значительная неподрессоренная масса из-за наличия балки моста; 2) значительное межлистовое сухое трение; 3) малая рессорная колея управляемого моста; 4) зависимость кинематики одного колеса моста от другого.
Зависимые подвески на продольных полуэллиптических рессорах просты по конструкции. Они не нуждаются в направляющем аппарате, так как его роль выполняют сами рессоры и балка моста. Однако их существенными недостатками являются: 1) значительная неподрессоренная масса из-за наличия балки моста; 2) значительное межлистовое сухое трение; 3) малая рессорная колея управляемого моста; 4) зависимость кинематики одного колеса моста от другого.
 к значительным динамическим нагрузкам, передаваемым на несущую систему,") 2. Все указанные факторы приводят: 1) к значительным динамическим нагрузкам, передаваемым на несущую систему, 2) неудовлетворительной плавности хода и устойчивости при больших скоростях движения, 3) относительно малому сроку службы упругих элементов. При использовании в качестве основных упругих элементов винтовых пружин, торсионов, пневмоподушек или гидро пневмоцилиндров зависимые подвески избавляются от ряда указанных недостатков. Однако тогда в конструкции подвесок необходим направляющий аппарат в виде продольных, поперечных, диагональных, верхних и нижних рычагов как, например, сзади на ВАЗ-2101. При V-образном или диагональном расположении штанг отпадает необходимость в поперечной реактивной штанге (тяге Панара), которая предназначена для восприятия поперечных нагрузок.
2. Все указанные факторы приводят: 1) к значительным динамическим нагрузкам, передаваемым на несущую систему, 2) неудовлетворительной плавности хода и устойчивости при больших скоростях движения, 3) относительно малому сроку службы упругих элементов. При использовании в качестве основных упругих элементов винтовых пружин, торсионов, пневмоподушек или гидро пневмоцилиндров зависимые подвески избавляются от ряда указанных недостатков. Однако тогда в конструкции подвесок необходим направляющий аппарат в виде продольных, поперечных, диагональных, верхних и нижних рычагов как, например, сзади на ВАЗ-2101. При V-образном или диагональном расположении штанг отпадает необходимость в поперечной реактивной штанге (тяге Панара), которая предназначена для восприятия поперечных нагрузок.
 Назначение рычагов подвески - отнять нежелательные степени свободы у неподрессоренных масс, то есть обеспечить им заданную кинематику при движении относительно подрессоренной массы и опорной поверхности. б) а) X Z г) в) д) Y Схемы зависимых подвесок
Назначение рычагов подвески - отнять нежелательные степени свободы у неподрессоренных масс, то есть обеспечить им заданную кинематику при движении относительно подрессоренной массы и опорной поверхности. б) а) X Z г) в) д) Y Схемы зависимых подвесок
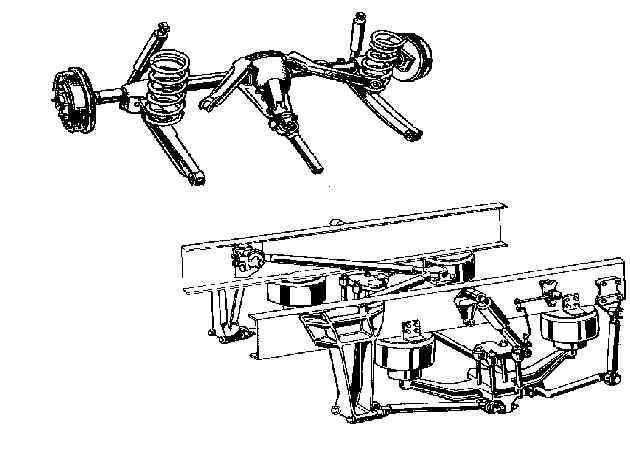
 5. В случае близкого расположения двух мостов часто применяют балансирные подвески. Тогда, даже при использовании в качестве упругих элементов рессор, всё равно применяется направляющий аппарат в виде двух нижних рычагов и одного или двух верхних для каждого моста. lв е b rк Rx Rz lн Схема балансирной подвески
5. В случае близкого расположения двух мостов часто применяют балансирные подвески. Тогда, даже при использовании в качестве упругих элементов рессор, всё равно применяется направляющий аппарат в виде двух нижних рычагов и одного или двух верхних для каждого моста. lв е b rк Rx Rz lн Схема балансирной подвески
 6. Несмотря на широкое распространение зависимых подвесок, надо признать, что при прочих равных условиях наилучшую плавность хода обеспечивают независимые подвески, к тому же в них минимизируется гироскопический момент колёс, значительная величина которого в подвесках управляемых мостов может привести к потере контроля над машиной (эффект “Шимми”).
6. Несмотря на широкое распространение зависимых подвесок, надо признать, что при прочих равных условиях наилучшую плавность хода обеспечивают независимые подвески, к тому же в них минимизируется гироскопический момент колёс, значительная величина которого в подвесках управляемых мостов может привести к потере контроля над машиной (эффект “Шимми”).
 Направляющий аппарат любой независимой подвески обеспечивает одну степень свободы неподрессоренной массы относительно подрессоренной. Наибольшее распространение на самоходной технике нашли рычажные подвески. а) Х б) в) г) Х Схемы рычажных независимых подвесок По расположению рычагов относительно продольной оси машины различают подвески: 1) с продольными рычагами (рис. а); 2) с поперечными рычагами (рис. б); 3) с диагональными рычагами (рис. в); 4) Макферсон (рис. г).
Направляющий аппарат любой независимой подвески обеспечивает одну степень свободы неподрессоренной массы относительно подрессоренной. Наибольшее распространение на самоходной технике нашли рычажные подвески. а) Х б) в) г) Х Схемы рычажных независимых подвесок По расположению рычагов относительно продольной оси машины различают подвески: 1) с продольными рычагами (рис. а); 2) с поперечными рычагами (рис. б); 3) с диагональными рычагами (рис. в); 4) Макферсон (рис. г).
 является подвеска") 8. Частным случаем подвески с поперечными рычагами (длина верхнего рычага равна нулю) является подвеска “Качающаяся свеча” или, что тоже самое, подвеска Макферсон.
8. Частным случаем подвески с поперечными рычагами (длина верхнего рычага равна нулю) является подвеска “Качающаяся свеча” или, что тоже самое, подвеска Макферсон.
 Независимая подвеска на двух поперечных рычагах равной длины полностью исключает изменение угла наклона плоскости вращения колеса d к. Это значит, что исключается появление гироскопического момента, который может привести к вилянию управляемых колёс (эффект Шимми) Mг = Jк к d к /dt, где Jк - момент инерции колеса, кг м 2; к - угловая скорость колеса; d к /dt - скорость наклона плоскости вращения колеса. Вместе с тем значительное изменение колеи моста ( B) при использовании подвески на двух поперечных рычагах равной длины может приводить к преждевременному износу шин и ухудшению управляемости из-за появления значительной боковой силы при наезде на неровность.
Независимая подвеска на двух поперечных рычагах равной длины полностью исключает изменение угла наклона плоскости вращения колеса d к. Это значит, что исключается появление гироскопического момента, который может привести к вилянию управляемых колёс (эффект Шимми) Mг = Jк к d к /dt, где Jк - момент инерции колеса, кг м 2; к - угловая скорость колеса; d к /dt - скорость наклона плоскости вращения колеса. Вместе с тем значительное изменение колеи моста ( B) при использовании подвески на двух поперечных рычагах равной длины может приводить к преждевременному износу шин и ухудшению управляемости из-за появления значительной боковой силы при наезде на неровность.
 хоть и") 10. Подвеска на двух поперечных рычагах различной длины (нижний, как правило, длиннее) хоть и не исключает наклона плоскости вращения колеса, но минимизирует его до значения = 5. . . 7 за счёт соотношения длин рычагов lв / lн 0, 5, где lв - длина верхнего рычага; lн - длина нижнего рычага. Вместе с тем такая схема подвески значительно меньше изменяет колею по сравнению с предыдущей ( B = 4. . . 5 мм), что, как правило, компенсируется упругой деформацией шин и не приводит к их боковому скольжению. Поэтому такие схемы подвесок применяются широко.
10. Подвеска на двух поперечных рычагах различной длины (нижний, как правило, длиннее) хоть и не исключает наклона плоскости вращения колеса, но минимизирует его до значения = 5. . . 7 за счёт соотношения длин рычагов lв / lн 0, 5, где lв - длина верхнего рычага; lн - длина нижнего рычага. Вместе с тем такая схема подвески значительно меньше изменяет колею по сравнению с предыдущей ( B = 4. . . 5 мм), что, как правило, компенсируется упругой деформацией шин и не приводит к их боковому скольжению. Поэтому такие схемы подвесок применяются широко.
 11. В подвесках с продольными рычагами не изменяется колея, но происходит изменение базы ( L), что может приводить к значительным крутильным колебаниям в трансмиссии и продольному скольжению колёс, а значит к преждевременному износу шин. Такие подвески делают как одно-, так и двухрычажными. Существенный недостаток таких подвесок - значительная материалоёмкость рычагов для обеспечения достаточной боковой жёсткости направляющего аппарата, так как рычаги при действии боковой силы работают на изгиб.
11. В подвесках с продольными рычагами не изменяется колея, но происходит изменение базы ( L), что может приводить к значительным крутильным колебаниям в трансмиссии и продольному скольжению колёс, а значит к преждевременному износу шин. Такие подвески делают как одно-, так и двухрычажными. Существенный недостаток таких подвесок - значительная материалоёмкость рычагов для обеспечения достаточной боковой жёсткости направляющего аппарата, так как рычаги при действии боковой силы работают на изгиб.
 Задний мост ВАЗ-2110
Задний мост ВАЗ-2110
 13. Использование подвески с диагональным расположением рычагов позволяет увеличить жёсткость направляющего аппарата в боковом направлении при сохранении достоинств ранее рассмотренных схем. Поэтому применяется на легковых автомобилях высокого класса, например, фирмы BMW.
13. Использование подвески с диагональным расположением рычагов позволяет увеличить жёсткость направляющего аппарата в боковом направлении при сохранении достоинств ранее рассмотренных схем. Поэтому применяется на легковых автомобилях высокого класса, например, фирмы BMW.
 14. Основной характеристикой упругого элемента является его коэффициент жёсткости су. По закону Гука, коэффициент жёсткости - это отношение приращения силового фактора, действующего на упругий элемент (силы d. Fу или момента d. Му), к приращению его перемещения (линейного df или углового d ). Упругий элемент, работающий на сжатие/растяжение, например, винтовая пружина, имеет коэффициент жёсткости су = d. Fу / df. Для упругих элементов, работающих на кручение, например, торсион имеем су = d. Му / d.
14. Основной характеристикой упругого элемента является его коэффициент жёсткости су. По закону Гука, коэффициент жёсткости - это отношение приращения силового фактора, действующего на упругий элемент (силы d. Fу или момента d. Му), к приращению его перемещения (линейного df или углового d ). Упругий элемент, работающий на сжатие/растяжение, например, винтовая пружина, имеет коэффициент жёсткости су = d. Fу / df. Для упругих элементов, работающих на кручение, например, торсион имеем су = d. Му / d.
 Если коэффициент жёсткости упругого элемента не изменяется от деформации, то такой упругий элемент называют линейным. В этом случае су = d. Fу / df const. К линейным упругим элементам относят рессоры, винтовые цилиндрические пружины, торсионы. Если же коэффициент жёсткости упругого элемента изменяется в зависимости от его деформации, то такие упругие элементы называют нелинейными или прогрессивными. К ним относят пневмо- и гидроэлементы, конические и бочкообразные винтовые пружины, резиновые блоки. Характеристики упругих элементов изображены на рис. , где линия 1 показывает характеристику линейного, а кривая 2 - прогрессивного. Fу 2 1 f Характеристики упругих элементов
Если коэффициент жёсткости упругого элемента не изменяется от деформации, то такой упругий элемент называют линейным. В этом случае су = d. Fу / df const. К линейным упругим элементам относят рессоры, винтовые цилиндрические пружины, торсионы. Если же коэффициент жёсткости упругого элемента изменяется в зависимости от его деформации, то такие упругие элементы называют нелинейными или прогрессивными. К ним относят пневмо- и гидроэлементы, конические и бочкообразные винтовые пружины, резиновые блоки. Характеристики упругих элементов изображены на рис. , где линия 1 показывает характеристику линейного, а кривая 2 - прогрессивного. Fу 2 1 f Характеристики упругих элементов
 Следует различать коэффициент жёсткости упругого элемента и коэффициент жёсткости подвески. Коэффициентом жёсткости подвески называют отношение приращения нормальной реакции колеса d. Rz к приращению вертикального хода колеса d. Zн, под которым понимают изменение расстояния между колесом и подрессоренной массой вдоль линии действия нормальной реакции колеса Rz. Зная коэффициент жёсткости упругого элемента и кинематические характеристики направляющего аппарата подвески, можно определить её упругую характеристику. Очевидно, что чем ближе расположен упругий элемент к оси поворота рычага, то есть, чем больше передаточное число рычага подвески, тем меньше деформация упругого элемента, но больше жёсткость подвески.
Следует различать коэффициент жёсткости упругого элемента и коэффициент жёсткости подвески. Коэффициентом жёсткости подвески называют отношение приращения нормальной реакции колеса d. Rz к приращению вертикального хода колеса d. Zн, под которым понимают изменение расстояния между колесом и подрессоренной массой вдоль линии действия нормальной реакции колеса Rz. Зная коэффициент жёсткости упругого элемента и кинематические характеристики направляющего аппарата подвески, можно определить её упругую характеристику. Очевидно, что чем ближе расположен упругий элемент к оси поворота рычага, то есть, чем больше передаточное число рычага подвески, тем меньше деформация упругого элемента, но больше жёсткость подвески.
 Наиболее типичная упругая характеристика подвески имеет вид Rz A Rz. ст 2 Zн 1 Zн. 0 Zн. ст Zн. max Упругая характеристика подвески Наклонный линейный участок характеристики соответствует работе основного упругого элемента подвески. Точка А показывает положение при номинальной статической нагрузке. Тангенс угла на характеристике является коэффициентом жёсткости основного упругого элемента, приведенного к оси колеса. Криволинейный участок 1 соответствует совместной работе основного упругого элемента с дополнительным - буфером отбоя, а участок 2 соответствует совместной работе основного упругого элемента с дополнительным - буфером сжатия. Как видим, характеристика реальной подвески существенно нелинейна.
Наиболее типичная упругая характеристика подвески имеет вид Rz A Rz. ст 2 Zн 1 Zн. 0 Zн. ст Zн. max Упругая характеристика подвески Наклонный линейный участок характеристики соответствует работе основного упругого элемента подвески. Точка А показывает положение при номинальной статической нагрузке. Тангенс угла на характеристике является коэффициентом жёсткости основного упругого элемента, приведенного к оси колеса. Криволинейный участок 1 соответствует совместной работе основного упругого элемента с дополнительным - буфером отбоя, а участок 2 соответствует совместной работе основного упругого элемента с дополнительным - буфером сжатия. Как видим, характеристика реальной подвески существенно нелинейна.
 статический") 18. Весь ход колеса относительно несущей системы машины делят на две части: 1) статический прогиб подвески или статический ход, определяемый как разность Zст = Zн. ст – Zн. 0 (см. рис. ); 2) динамический прогиб подвески или динамический ход определяется как разность Zд = Zн. max – Zн. ст. Статический ход подвески может быть меньше статического прогиба основного упругого элемента. Это будет в том случае, если имеет место преднатяг основного упругого элемента при сборке подвески, что характерно, например, для пружинных подвесок. В результате снимается ряд компоновочных проблем. Величины ходов подвески и их соотношение оказывают существенное влияние на плавность хода самоходной машины.
18. Весь ход колеса относительно несущей системы машины делят на две части: 1) статический прогиб подвески или статический ход, определяемый как разность Zст = Zн. ст – Zн. 0 (см. рис. ); 2) динамический прогиб подвески или динамический ход определяется как разность Zд = Zн. max – Zн. ст. Статический ход подвески может быть меньше статического прогиба основного упругого элемента. Это будет в том случае, если имеет место преднатяг основного упругого элемента при сборке подвески, что характерно, например, для пружинных подвесок. В результате снимается ряд компоновочных проблем. Величины ходов подвески и их соотношение оказывают существенное влияние на плавность хода самоходной машины.
 Одним из показателей, характеризующих подвеску, является коэффициент динамичности. Он определяется отношением полного хода подвески к статическому Кд = (Zд + Zст) / Zст = 1 + Zд / Zст. Для современных самоходных машин Кд = 1, 2. . . 2, 5. Чем больше динамический прогиб, тем больше Кд, тем лучше плавность хода при прочих равных условиях. Однако величина динамического прогиба подвески ограничивается дорожным просветом машины для недопущения касания неровностями опорной поверхности подрессоренных частей машины. Дорожный просвет, в свою очередь, определяется типом и назначением самоходной машины и ограничивается, в частности, показателями поперечной устойчивости.
Одним из показателей, характеризующих подвеску, является коэффициент динамичности. Он определяется отношением полного хода подвески к статическому Кд = (Zд + Zст) / Zст = 1 + Zд / Zст. Для современных самоходных машин Кд = 1, 2. . . 2, 5. Чем больше динамический прогиб, тем больше Кд, тем лучше плавность хода при прочих равных условиях. Однако величина динамического прогиба подвески ограничивается дорожным просветом машины для недопущения касания неровностями опорной поверхности подрессоренных частей машины. Дорожный просвет, в свою очередь, определяется типом и назначением самоходной машины и ограничивается, в частности, показателями поперечной устойчивости.
 определяет так") Площадь между кривой упругой характеристики подвески и осью абсцисс (см. рис. ) определяет так называемую динамическую ёмкость подвески Если динамическая ёмкость будет недостаточной для данной машины, то подвеска будет слишком мягкой. В результате чего будут иметь место частые пробои подвески при движении по типичному микропрофилю. Если же U будет чрезмерно велико, то подвеска будет слишком жёсткой. В результате будет иметь место явление тряски при движении опять же по типичному микропрофилю.
Площадь между кривой упругой характеристики подвески и осью абсцисс (см. рис. ) определяет так называемую динамическую ёмкость подвески Если динамическая ёмкость будет недостаточной для данной машины, то подвеска будет слишком мягкой. В результате чего будут иметь место частые пробои подвески при движении по типичному микропрофилю. Если же U будет чрезмерно велико, то подвеска будет слишком жёсткой. В результате будет иметь место явление тряски при движении опять же по типичному микропрофилю.
 21. Другой важной характеристикой подвески является её коэффициент сопротивления, который зависит от характеристик амортизаторов и их расположения относительно колёс и центра масс машины. Сила сопротивления гидравлического амортизатора (диссипативная сила) определяется зависимостью Fам = kам vамn, где kам - коэффициент сопротивления амортизатора; vам - скорость поршня амортизатора (vам 0. . . 1 м/с); n - показатель степени, зависящий от vaм, размеров дросселей амортизатора и вязкости рабочей жидкости (принимают n = 1).
21. Другой важной характеристикой подвески является её коэффициент сопротивления, который зависит от характеристик амортизаторов и их расположения относительно колёс и центра масс машины. Сила сопротивления гидравлического амортизатора (диссипативная сила) определяется зависимостью Fам = kам vамn, где kам - коэффициент сопротивления амортизатора; vам - скорость поршня амортизатора (vам 0. . . 1 м/с); n - показатель степени, зависящий от vaм, размеров дросселей амортизатора и вязкости рабочей жидкости (принимают n = 1).
 В амортизаторах современных машин диссипативная сила при сжатии значительно меньше, чем при отбое, что обеспечивается перетеканием рабочей жидкости через дроссели сжатия и отбоя соответственно. Кроме того, современные амортизаторы имеют разгрузочные клапаны сжатия и отбоя, которые необходимы для уменьшения силы сопротивления Fам при больших скоростях движения подрессоренной массы относительно неподрессоренных. Обычно указанные клапаны открываются при vам = 0, 2. . . 0, 4 м/с. В этом случае типичная характеристика амортизатора имеет вид как на рис. Fам 0 сжатие vам отбой Характеристика амортизатора
В амортизаторах современных машин диссипативная сила при сжатии значительно меньше, чем при отбое, что обеспечивается перетеканием рабочей жидкости через дроссели сжатия и отбоя соответственно. Кроме того, современные амортизаторы имеют разгрузочные клапаны сжатия и отбоя, которые необходимы для уменьшения силы сопротивления Fам при больших скоростях движения подрессоренной массы относительно неподрессоренных. Обычно указанные клапаны открываются при vам = 0, 2. . . 0, 4 м/с. В этом случае типичная характеристика амортизатора имеет вид как на рис. Fам 0 сжатие vам отбой Характеристика амортизатора
 Следует различать коэффициент жёсткости упругого элемента и коэффициент жёсткости подвески. Аналогично следует различать коэффициент сопротивления амортизатора и коэффициент сопротивления подвески. Так, коэффициент сопротивления амортизатора, приведенный к колесу (коэффициент сопротивления подвески), определяется с помощью передаточного числа подвески (см. рис. ) по выражению a b Схема установки амортизатора
Следует различать коэффициент жёсткости упругого элемента и коэффициент жёсткости подвески. Аналогично следует различать коэффициент сопротивления амортизатора и коэффициент сопротивления подвески. Так, коэффициент сопротивления амортизатора, приведенный к колесу (коэффициент сопротивления подвески), определяется с помощью передаточного числа подвески (см. рис. ) по выражению a b Схема установки амортизатора
 Скорость затухания колебаний оценивают с помощью декремента. Это отношение амплитуд смежных периодов свободных колебаний Д = А 1 / А 2. Амплитуды свободных колебаний, например, подрессоренной массы определяют путем осциллографирования, то есть регистрации процесса колебаний во времени, после прекращения действия внешнего возмущения. Типичный график свободных затухающих колебаний изображён на рис. Z A 1 A 2 t, c График свободных колебаний
Скорость затухания колебаний оценивают с помощью декремента. Это отношение амплитуд смежных периодов свободных колебаний Д = А 1 / А 2. Амплитуды свободных колебаний, например, подрессоренной массы определяют путем осциллографирования, то есть регистрации процесса колебаний во времени, после прекращения действия внешнего возмущения. Типичный график свободных затухающих колебаний изображён на рис. Z A 1 A 2 t, c График свободных колебаний
 25. При анализе систем виброзащиты одним из основных показателей, оценивающих её качества, является начальная частота свободных колебаний подрессоренной массы. Отметим, что собственная не учитывает сопротивление. по Ш. О. Кулону частота колебаний системы При совпадении начальной частоты свободных колебаний с частотой вынужденных колебаний наступает резонанс, где имеет место наибольшая величина амплитуд колебаний. На величину резонансной частоты влияет как значение собственной частоты (жёсткость упругих элементов и подрессоренная масса), так и параметры амортизаторов (коэффициенты сопротивлений и их положение относительно центра подрессоренной
25. При анализе систем виброзащиты одним из основных показателей, оценивающих её качества, является начальная частота свободных колебаний подрессоренной массы. Отметим, что собственная не учитывает сопротивление. по Ш. О. Кулону частота колебаний системы При совпадении начальной частоты свободных колебаний с частотой вынужденных колебаний наступает резонанс, где имеет место наибольшая величина амплитуд колебаний. На величину резонансной частоты влияет как значение собственной частоты (жёсткость упругих элементов и подрессоренная масса), так и параметры амортизаторов (коэффициенты сопротивлений и их положение относительно центра подрессоренной
 Количество собственных частот колебательной системы равно числу её степеней свободы. Однако, при расчёте подвески самоходной машины прежде всего подлежит определению резонансная частота вертикальных колебаний центра подрессоренной массы wz и резонансная частота продольных угловых колебаний подрессоренной массы w : где сi - коэффициент жёсткости подвески i-го колеса; i - коэффициент сопротивления подвески i-го колеса; m - подрессоренная масса машины; где li - расстояние от центра масс до оси i-го колеса в профильной плоскости XZ; Jy - момент инерции подрессоренной массы машины относительно поперечной оси Y.
Количество собственных частот колебательной системы равно числу её степеней свободы. Однако, при расчёте подвески самоходной машины прежде всего подлежит определению резонансная частота вертикальных колебаний центра подрессоренной массы wz и резонансная частота продольных угловых колебаний подрессоренной массы w : где сi - коэффициент жёсткости подвески i-го колеса; i - коэффициент сопротивления подвески i-го колеса; m - подрессоренная масса машины; где li - расстояние от центра масс до оси i-го колеса в профильной плоскости XZ; Jy - момент инерции подрессоренной массы машины относительно поперечной оси Y.
 Ещё одним важным показателем для оценки качества системы виброзащиты является коэффициент демпфирования колебаний kдемп, который показывает, какая часть суммарного коэффициента сопротивления приходится на единицу подрессоренной массы или её момента инерции. Измеряется коэффициент демпфирования колебаний в тех же единицах, что и частота. Для вертикальных колебаний подрессоренной массы коэффициент демпфирования определяют по зависимости kдем. z = i / (2 m). Для угловых продольных колебаний kдем. = ( i li 2 ) / (2 Jy). Для современных машин значения коэффициентов демпфирования лежат в диапазоне kдем. z kдем. = 1. . . 5 рад/с.
Ещё одним важным показателем для оценки качества системы виброзащиты является коэффициент демпфирования колебаний kдемп, который показывает, какая часть суммарного коэффициента сопротивления приходится на единицу подрессоренной массы или её момента инерции. Измеряется коэффициент демпфирования колебаний в тех же единицах, что и частота. Для вертикальных колебаний подрессоренной массы коэффициент демпфирования определяют по зависимости kдем. z = i / (2 m). Для угловых продольных колебаний kдем. = ( i li 2 ) / (2 Jy). Для современных машин значения коэффициентов демпфирования лежат в диапазоне kдем. z kдем. = 1. . . 5 рад/с.
 =") 28. Между коэффициентами демпфирования, декрементами и резонансными частотами колебаний существуют следующие связи: ln(Дz) = 2 kдем. z / z ; ln(Д ) = 2 kдем. / . Одним из важнейших показателей, оценивающих интенсивность затухания колебаний, а значит и качество подвески, являются относительные коэффициенты демпфирования, которые определяют по выражениям: z = kдем. z / z ; = kдем. / . Для современных машин значения относительных демпфирования лежат в диапазоне z = 0, 2. . . 0, 4. коэффициентов
28. Между коэффициентами демпфирования, декрементами и резонансными частотами колебаний существуют следующие связи: ln(Дz) = 2 kдем. z / z ; ln(Д ) = 2 kдем. / . Одним из важнейших показателей, оценивающих интенсивность затухания колебаний, а значит и качество подвески, являются относительные коэффициенты демпфирования, которые определяют по выражениям: z = kдем. z / z ; = kдем. / . Для современных машин значения относительных демпфирования лежат в диапазоне z = 0, 2. . . 0, 4. коэффициентов
 29. Относительный коэффициент демпфирования - это величина, обратная удвоенному количеству периодов свободных колебаний системы. Например, при z = 0, 2 имеем количество свободных колебаний k = 2, 5. То есть после прекращения внешнего воздействия подрессоренная масса сделает всего два с половиной колебания. При z = 0, 5 имеем k = 1, т. е. получим апериодические колебания второго порядка, значит полное затухание колебаний будет в конце второго полупериода. Допускать апериодической характеристики подвески нельзя, потому что при интенсивных вынужденных колебаниях, особенно при движении по гармоническому микропрофилю, ввиду несимметричной характеристики амортизаторов будут существенно уменьшаться динамические хода подвесок (“приседание” машины) вплоть до пробоя. Но чрезмерно малая величина относительного коэффициента демпфирования приведёт к пробою подвески при частотах вынужденных колебаний близких к резонансным.
29. Относительный коэффициент демпфирования - это величина, обратная удвоенному количеству периодов свободных колебаний системы. Например, при z = 0, 2 имеем количество свободных колебаний k = 2, 5. То есть после прекращения внешнего воздействия подрессоренная масса сделает всего два с половиной колебания. При z = 0, 5 имеем k = 1, т. е. получим апериодические колебания второго порядка, значит полное затухание колебаний будет в конце второго полупериода. Допускать апериодической характеристики подвески нельзя, потому что при интенсивных вынужденных колебаниях, особенно при движении по гармоническому микропрофилю, ввиду несимметричной характеристики амортизаторов будут существенно уменьшаться динамические хода подвесок (“приседание” машины) вплоть до пробоя. Но чрезмерно малая величина относительного коэффициента демпфирования приведёт к пробою подвески при частотах вынужденных колебаний близких к резонансным.
 30. Для оценки интенсивности колебаний в зависимости от частоты возмущающего воздействия используют амплитудно-частотные характеристики (АЧХ). АЧХ системы виброзащиты самоходной машины - это зависимость амплитуд колебаний подрессоренной массы от частоты возмущающего воздействия. Рассматриваются как амплитуды перемещений (вертикальных Z или угловых ), так и ускорений. Учитывая тот факт, что оценку плавности хода при испытаниях самоходных машин осуществляют при постоянных скоростях движения vx и длинах неровностей lq , при построении АЧХ подвески самоходной машины в качестве аргумента обычно используется не частота возмущающих воздействий, а скорость машины. Z, Z’’ Z Z’’ qmax 0 vx АЧХ вертикальных перемещений и ускорений одномассовой системы
30. Для оценки интенсивности колебаний в зависимости от частоты возмущающего воздействия используют амплитудно-частотные характеристики (АЧХ). АЧХ системы виброзащиты самоходной машины - это зависимость амплитуд колебаний подрессоренной массы от частоты возмущающего воздействия. Рассматриваются как амплитуды перемещений (вертикальных Z или угловых ), так и ускорений. Учитывая тот факт, что оценку плавности хода при испытаниях самоходных машин осуществляют при постоянных скоростях движения vx и длинах неровностей lq , при построении АЧХ подвески самоходной машины в качестве аргумента обычно используется не частота возмущающих воздействий, а скорость машины. Z, Z’’ Z Z’’ qmax 0 vx АЧХ вертикальных перемещений и ускорений одномассовой системы
 При скорости v 0 имеем резонансную частоту вертикальных колебаний подрессоренной массы. В этом случае собственная частота системы почти совпадает с частотой вынужденных колебаний, то есть с частотой воздействия микропрофиля опорной поверхности на движитель машины. Однако, чем выше коэффициент сопротивления системы , тем левее на АЧХ будет находиться v 0 и тем больше резонансная частота будет отличаться от собственной частоты колебаний подрессоренной массы. При относительном коэффициенте демпфирования системы z = 0, 2. . . 0, 4 резонансная частота отличается от собственной всего на 5. . . 10 %. При апериодических колебаниях v 0 = 0.
При скорости v 0 имеем резонансную частоту вертикальных колебаний подрессоренной массы. В этом случае собственная частота системы почти совпадает с частотой вынужденных колебаний, то есть с частотой воздействия микропрофиля опорной поверхности на движитель машины. Однако, чем выше коэффициент сопротивления системы , тем левее на АЧХ будет находиться v 0 и тем больше резонансная частота будет отличаться от собственной частоты колебаний подрессоренной массы. При относительном коэффициенте демпфирования системы z = 0, 2. . . 0, 4 резонансная частота отличается от собственной всего на 5. . . 10 %. При апериодических колебаниях v 0 = 0.