

Bioelectric control of prosthesis.pptx
- Количество слайдов: 86
 ВЫПОЛНИЛА СТУДЕНТКА ГРУППЫ 997: ГАФИАТУЛЛИНА А. Ш.
ВЫПОЛНИЛА СТУДЕНТКА ГРУППЫ 997: ГАФИАТУЛЛИНА А. Ш.
 СЕЙЧАС ВЫ ВИДИТЕ НА ЭКРАНЕ ИЗОБРАЖЕНИЕ. КАК ВЫ ДУМАЕТЕ, ЧТО ЭТО?
СЕЙЧАС ВЫ ВИДИТЕ НА ЭКРАНЕ ИЗОБРАЖЕНИЕ. КАК ВЫ ДУМАЕТЕ, ЧТО ЭТО?
 Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности…
Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности…
 Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать!
Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать!
 Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать! Это уж не говоря о том, что на кончиках пальцев у человека располагаются главные осязательные органы, имитировать которые – особо сложная задача.
Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать! Это уж не говоря о том, что на кончиках пальцев у человека располагаются главные осязательные органы, имитировать которые – особо сложная задача.
 Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать! Это уж не говоря о том, что на кончиках пальцев у человека располагаются главные осязательные органы, имитировать которые – особо сложная задача. Не удивительно, что к настоящему времени ни одного стопроцентно успешного проекта по созданию бионической руки не существует.
Создание искусственных конечностей, которые могли бы заменить людям их природные, задача чрезвычайной сложности… Во первых, из за того, насколько деликатным является это «устройство» , сколько тончайших движений оно способно совершать! Это уж не говоря о том, что на кончиках пальцев у человека располагаются главные осязательные органы, имитировать которые – особо сложная задача. Не удивительно, что к настоящему времени ни одного стопроцентно успешного проекта по созданию бионической руки не существует.
 И ТОГДА ПЕРЕД НАМИ ВОЗНИКАЮТ ВОПРОСЫ: • Как изготовить этот протез? • Как сделать так, чтобы протез выполнял все те же функции, что выполняла потерянная конечность? • Как сделать так, чтобы все функции протезом выполнялись безо всяких внешних возбудителей? Т. е. так же, как и человек «приказывает» своей конечности что либо сделать.
И ТОГДА ПЕРЕД НАМИ ВОЗНИКАЮТ ВОПРОСЫ: • Как изготовить этот протез? • Как сделать так, чтобы протез выполнял все те же функции, что выполняла потерянная конечность? • Как сделать так, чтобы все функции протезом выполнялись безо всяких внешних возбудителей? Т. е. так же, как и человек «приказывает» своей конечности что либо сделать.
 Бионические протезы – это протезы, способные брать на себя функции утраченных органов и конечностей.
Бионические протезы – это протезы, способные брать на себя функции утраченных органов и конечностей.
 Как пример, многим известны кадры из фильмов «Звездные войны» и «Терминатор» . Протезы героев выглядят и функционируют неотличимо от натуральной руки и даже, похоже, передают тактильные ощущения. То есть является почти совершенным «бионическим» протезом.
Как пример, многим известны кадры из фильмов «Звездные войны» и «Терминатор» . Протезы героев выглядят и функционируют неотличимо от натуральной руки и даже, похоже, передают тактильные ощущения. То есть является почти совершенным «бионическим» протезом.
 Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность.
Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность.
 Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность. В настоящее время решение второй проблемы достигнуто в удовлетворительных пределах.
Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность. В настоящее время решение второй проблемы достигнуто в удовлетворительных пределах.
 Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность. первая же задача требует решения в соответствии с современным уровнем техники, что в свою очередь определяет необходимость разработки и улучшения
Назначение идеального протеза заключается в выполнении сложных и нетиповых рабочих операций, связанных с обеспечением жизнедеятельности инвалида, поэтому он должен удовлетворять двум основным требованиям: • Функциональность; • Косметичность. первая же задача требует решения в соответствии с современным уровнем техники, что в свою очередь определяет необходимость разработки и улучшения
,") ЦЕЛЬ РАБОТЫ: Разработка и исследование принципов построения информационно измерительных систем управления биоэлектрическими протезами (ИИСУБП), технических средств и методов, применяемых в них, позволяющих увеличить общую эффективность применения ИИСУБП в качестве средства комплексной реабилитации инвалидов.
ЦЕЛЬ РАБОТЫ: Разработка и исследование принципов построения информационно измерительных систем управления биоэлектрическими протезами (ИИСУБП), технических средств и методов, применяемых в них, позволяющих увеличить общую эффективность применения ИИСУБП в качестве средства комплексной реабилитации инвалидов.
,") ЦЕЛЬ РАБОТЫ: Разработка и исследование принципов построения информационно измерительных систем управления биоэлектрическими протезами (ИИСУБП), технических средств и методов, применяемых в них, позволяющих увеличить общую эффективность применения ИИСУБП в качестве средства комплексной реабилитации инвалидов. Далее сформулируем задачи для достижения этой цели…
ЦЕЛЬ РАБОТЫ: Разработка и исследование принципов построения информационно измерительных систем управления биоэлектрическими протезами (ИИСУБП), технических средств и методов, применяемых в них, позволяющих увеличить общую эффективность применения ИИСУБП в качестве средства комплексной реабилитации инвалидов. Далее сформулируем задачи для достижения этой цели…
 ЗАДАЧИ: • Проанализировать и систематизировать известные принципы построения современных информационно измерительных систем управления протезами (ИИСУП); • Предложить и исследовать математические модели ИИСУБП и процесса генерации электромиографического (ЭМГ) сигнала, учитывающие влияние значимых для ИИСУБП факторов; • Исследовать и предложить методы обработки ЭМГ и нейросигналов, структуры устройств, их реализующих, адаптированные для применения в современных ИИСУП; • Сформулировать принципы построения ИИСУП, реализующих предложенные методы обработки ЭМГ и нейросигналов с учетом особенностей практической реализации;
ЗАДАЧИ: • Проанализировать и систематизировать известные принципы построения современных информационно измерительных систем управления протезами (ИИСУП); • Предложить и исследовать математические модели ИИСУБП и процесса генерации электромиографического (ЭМГ) сигнала, учитывающие влияние значимых для ИИСУБП факторов; • Исследовать и предложить методы обработки ЭМГ и нейросигналов, структуры устройств, их реализующих, адаптированные для применения в современных ИИСУП; • Сформулировать принципы построения ИИСУП, реализующих предложенные методы обработки ЭМГ и нейросигналов с учетом особенностей практической реализации;
 Среди всех ИИСУП можно выделить наиболее перспективные: • информационно измерительные системы управления биоэлектрическими протезами (ИИСУБП), в том числе на основе распознающих систем (РС); • информационно измерительные системы управления нейроуправляемыми протезам с имплантируемыми электродами.
Среди всех ИИСУП можно выделить наиболее перспективные: • информационно измерительные системы управления биоэлектрическими протезами (ИИСУБП), в том числе на основе распознающих систем (РС); • информационно измерительные системы управления нейроуправляемыми протезам с имплантируемыми электродами.
 В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими устройствами либо органами самого человека.
В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими устройствами либо органами самого человека.
 В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими На рисунке: устройствами либо Эксперимент с органами самого человека. зажиганием и гашением лампы концентрацией внимания ( «воли» )
В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими На рисунке: устройствами либо Эксперимент с органами самого человека. зажиганием и гашением лампы концентрацией внимания ( «воли» )
 В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими Рассмотрим подробнее: устройствами либо • что представляет собой биоэлектрическое управление органами самого человека. движениями человека; • как удается согласовать сигналы управления с характеристиками двигательных органов человека? • каким образом эти сигналы воздействуют на живые исполнительные.
В основе биоэлектрического управления лежит использование электрической активности органов и систем живого организма в качестве программы для управления различными техническими Рассмотрим подробнее: устройствами либо • что представляет собой биоэлектрическое управление органами самого человека. движениями человека; • как удается согласовать сигналы управления с характеристиками двигательных органов человека? • каким образом эти сигналы воздействуют на живые исполнительные.
 Почему посылка управляющих сигналов из центров мозга, на пример команда сжать пальцы несуществующей руки, вызывает именно такие действия искусственной руки?
Почему посылка управляющих сигналов из центров мозга, на пример команда сжать пальцы несуществующей руки, вызывает именно такие действия искусственной руки?
 Из сказанного следует вывод, что если мы хотим получить информацию о конкретном движении, то съем ее должен производиться с наиболее низких уровней центральной нервной системы, то есть нервно мышечных групп.
Из сказанного следует вывод, что если мы хотим получить информацию о конкретном движении, то съем ее должен производиться с наиболее низких уровней центральной нервной системы, то есть нервно мышечных групп.
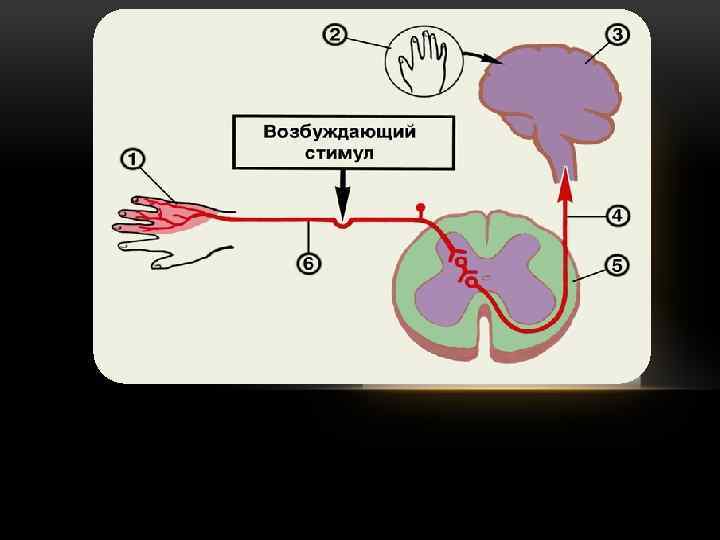
 Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам.
Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам.
 Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал.
Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал.
 Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал. Но не сразу! Здесь дей ствует правило: «Все или ничего» .
Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал. Но не сразу! Здесь дей ствует правило: «Все или ничего» .
 Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал. Но не сразу! Здесь дей ствует правило: «Все или ничего» . Сигнал будет послан лишь в том случае, если его интенсивность превзойдет порог возбуждения. Тогда вдоль нервного волокна пойдут в направлении мозга импуль сы, несущие информацию: «горячо» , «холодно» , «тихо» , «громко» , «светло» и т. п.
Нервная система пе редает информацию от рецепторов (нервных клеток, чувствитель ных к определенным внешним возбудителям: механическим, све товым, звуковым и т, п. ) к мозговым центрам. Когда рецептор получил возбуждение, он посылает сигнал. Но не сразу! Здесь дей ствует правило: «Все или ничего» . Сигнал будет послан лишь в том случае, если его интенсивность превзойдет порог возбуждения. Тогда вдоль нервного волокна пойдут в направлении мозга импуль сы, несущие информацию: «горячо» , «холодно» , «тихо» , «громко» , «светло» и т. п.
 Если импульсы, идущие от центров мозга, управляют, напри мер, движениями ладони, то частота импульсов будет тем выше, чем сильнее сжимается ладонь. Частота этих импульсов меняется от десятков герц до 300 . . . 500 Гц, однако амплитуда их остается постоянной (около 0, 1 В). Амплитуда импульсов не зависит от уров ня возбуждения, а только определяется свойствами данного нерва.
Если импульсы, идущие от центров мозга, управляют, напри мер, движениями ладони, то частота импульсов будет тем выше, чем сильнее сжимается ладонь. Частота этих импульсов меняется от десятков герц до 300 . . . 500 Гц, однако амплитуда их остается постоянной (около 0, 1 В). Амплитуда импульсов не зависит от уров ня возбуждения, а только определяется свойствами данного нерва.
 Если импульсы, идущие от центров мозга, управляют, напри мер, движениями ладони, то частота импульсов будет тем выше, чем сильнее сжимается ладонь. Частота этих импульсов меняется от десятков герц до 300 . . . 500 Гц, однако амплитуда их остается постоянной (около 0, 1 В). Амплитуда импульсов не зависит от уров ня возбуждения, а только определяется свойствами данного нерва. Управляющие нервные импульсы вызывают возбуждение элемен тарного мышечного волокна, изменяя его биоэлектрический потен циал. Это волокно может находиться в двух состояниях: сокращения или расслабления. Нужно лишь снять эти электрические сигналы с соответствующих мышц, находящихся под кожей и на поверхности тела , и после усиления использовать для управле ния различными техническими устройствами.
Если импульсы, идущие от центров мозга, управляют, напри мер, движениями ладони, то частота импульсов будет тем выше, чем сильнее сжимается ладонь. Частота этих импульсов меняется от десятков герц до 300 . . . 500 Гц, однако амплитуда их остается постоянной (около 0, 1 В). Амплитуда импульсов не зависит от уров ня возбуждения, а только определяется свойствами данного нерва. Управляющие нервные импульсы вызывают возбуждение элемен тарного мышечного волокна, изменяя его биоэлектрический потен циал. Это волокно может находиться в двух состояниях: сокращения или расслабления. Нужно лишь снять эти электрические сигналы с соответствующих мышц, находящихся под кожей и на поверхности тела , и после усиления использовать для управле ния различными техническими устройствами.
 Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения.
Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения.
 Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения. Электромиограммы мышц наиболее просто получить с помощью накожных электродов, устанавливаемых в зонах максимального сигнала данной мышцы. Электроды подключают к усилителям с большим коэффициентом усиления, в которых к тому же приняты меры для защиты от всевозможных наводок.
Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения. Электромиограммы мышц наиболее просто получить с помощью накожных электродов, устанавливаемых в зонах максимального сигнала данной мышцы. Электроды подключают к усилителям с большим коэффициентом усиления, в которых к тому же приняты меры для защиты от всевозможных наводок.
 Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения. Электромиограммы мышц наиболее просто получить с помощью накожных электродов, устанавливаемых в зонах максимального сигнала данной мышцы. Электроды подключают к усилителям с большим коэффициентом усиления, в которых к тому же приняты меры для защиты от всевозможных наводок.
Комплекс усредненных значений элекромиограмм всех мышц, участвующих в движении, является аналогом двигательного образа. Он получил название электромиографического образа движения. Электромиограммы мышц наиболее просто получить с помощью накожных электродов, устанавливаемых в зонах максимального сигнала данной мышцы. Электроды подключают к усилителям с большим коэффициентом усиления, в которых к тому же приняты меры для защиты от всевозможных наводок.
 • Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные.
• Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные.
 • Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные. • Значение амплитуды ЭМГ сигнала может лежать в пределах 20 мк. В до 2– 3 м. В и очень вариабельно для каждого человека и мышцы. • Частотный диапазон ЭМГ сигнала целесообразно ограничивать в полосе от 10 до 400 Гц.
• Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные. • Значение амплитуды ЭМГ сигнала может лежать в пределах 20 мк. В до 2– 3 м. В и очень вариабельно для каждого человека и мышцы. • Частотный диапазон ЭМГ сигнала целесообразно ограничивать в полосе от 10 до 400 Гц.
 • Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные. • Значение амплитуды ЭМГ сигнала может лежать в пределах 20 мк. В до 2– 3 м. В и очень вариабельно для каждого человека и мышцы. • Частотный диапазон ЭМГ сигнала целесообразно ограничивать в полосе от 10 до 400 Гц. При этом необходимо удалить из ЭМГ сигнала компоненту сетевой помехи 50 Гц!
• Основными значимыми параметрами ЭМГ сигнала как источника управляющей информации для ИИСУБП являются амплитудные и частотные. • Значение амплитуды ЭМГ сигнала может лежать в пределах 20 мк. В до 2– 3 м. В и очень вариабельно для каждого человека и мышцы. • Частотный диапазон ЭМГ сигнала целесообразно ограничивать в полосе от 10 до 400 Гц. При этом необходимо удалить из ЭМГ сигнала компоненту сетевой помехи 50 Гц!
 МЕТОДЫ ВЫДЕЛЕНИЯ ОСНОВНЫХ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ ЭМГ СИГНАЛА • Наибольшее распространение на практике получили методы выделения усредненного значения (огибающей) ЭМГ сигнала. • В качестве потенциально более эффективного метода обработки ЭМГ сигнала можно отметить вейвлет преобразование, хорошо зарекомендовавшее себя при анализе нестационарных сигналов, которым и является ЭМГ сигнал.
МЕТОДЫ ВЫДЕЛЕНИЯ ОСНОВНЫХ ИНФОРМАТИВНЫХ ПАРАМЕТРОВ ЭМГ СИГНАЛА • Наибольшее распространение на практике получили методы выделения усредненного значения (огибающей) ЭМГ сигнала. • В качестве потенциально более эффективного метода обработки ЭМГ сигнала можно отметить вейвлет преобразование, хорошо зарекомендовавшее себя при анализе нестационарных сигналов, которым и является ЭМГ сигнал.
 При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека.
При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека.
 При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека.
При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека.
 При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека. Мощность биоэлектрического сигнала весьма мала, поэтому для практического использования ее необходимо усиливать.
При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека. Мощность биоэлектрического сигнала весьма мала, поэтому для практического использования ее необходимо усиливать.
 При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека. Для этого используются электронные усилители, с помощью которых уровень биоэлектрического сигнала с мышц повышается до необходимой величины и преобразовывается в форму, пригодную для управления исполнительными органами протеза.
При биоэлектрическом управлении движениями человека в качестве исполнительных механизмов используются двигательные органы человека. Был создан специальный многоканальный прибор — "Миотон «(На рис. 1 показан а упрощенная блок система одного канала «Миотона» ), который позволяет осуществить управление рядом движений верхних и нижних конечностей, торса и головы человека. Для этого используются электронные усилители, с помощью которых уровень биоэлектрического сигнала с мышц повышается до необходимой величины и преобразовывается в форму, пригодную для управления исполнительными органами протеза.
 Схема манипуляционной системы с биоэлек трическим правлением. у
Схема манипуляционной системы с биоэлек трическим правлением. у
 Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему;
Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему;
 Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев
Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев
 Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев 3 — широкополосные линей ные усилители биотоков
Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев 3 — широкополосные линей ные усилители биотоков
 Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев 3 — широкополосные линей ные усилители биотоков 4 — преобразователи, превращающие биотоки в импульсы, управляющие работой малогабаритных элек тродвигателей или гидравлического привода (они приводят в дви жение пальцы искусственной руки). Каждый палец имеет собствен ный исполнительный механизм, а их суставы закреплены в мини атюрных подшипниках качения.
Схема манипуляционной системы с биоэлек трическим правлением. у 1— команды, передавае мые от мозга к мышцам через нервную систему; 2 электроды на предплечье (небольшой ремешок с несколькими электродами, при жатыми к точкам, где находятся мышцы, вызывающие сгибание и разгибание пальцев 3 — широкополосные линей ные усилители биотоков 4 — преобразователи, превращающие биотоки в импульсы, управляющие работой малогабаритных элек тродвигателей или гидравлического привода (они приводят в дви жение пальцы искусственной руки). Каждый палец имеет собствен ный исполнительный механизм, а их суставы закреплены в мини атюрных подшипниках качения.
 Обобщенная структурная схема ИИСУБП
Обобщенная структурная схема ИИСУБП
 МОДЕЛЬ ПРОЦЕССА ГЕНЕРАЦИИ ЭМГ СИГНАЛА. Для разработки полноценной модели процесса генерации ЭМГ сигнала необходимо учитывать ряд существенных параметров: • расстояние от электрода до отдельной двигательной единицы (ДЕ); • толщину подкожного жира; • тип и проводимость тканей; • расположенных между ДЕ и электродом.
МОДЕЛЬ ПРОЦЕССА ГЕНЕРАЦИИ ЭМГ СИГНАЛА. Для разработки полноценной модели процесса генерации ЭМГ сигнала необходимо учитывать ряд существенных параметров: • расстояние от электрода до отдельной двигательной единицы (ДЕ); • толщину подкожного жира; • тип и проводимость тканей; • расположенных между ДЕ и электродом.
 МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ:
МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ:
 МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Данная математическая модель генерации ЭМГ сигнала учитывает влияние всех основных значимых для построения ИИСУБП факторов на процесс генерации ЭМГ сигнала.
МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Данная математическая модель генерации ЭМГ сигнала учитывает влияние всех основных значимых для построения ИИСУБП факторов на процесс генерации ЭМГ сигнала.
 МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Данная математическая модель генерации ЭМГ сигнала учитывает влияние всех основных значимых для построения ИИСУБП факторов на процесс генерации ЭМГ сигнала. Анализ полученной математической модели показывает, что для надежного выделения ЭМГ сигнала на фоне шумов различного происхождения минимальное значение амплитуды ЭМГ сигнала должно быть Umin=10, 1 мк. В.
МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Данная математическая модель генерации ЭМГ сигнала учитывает влияние всех основных значимых для построения ИИСУБП факторов на процесс генерации ЭМГ сигнала. Анализ полученной математической модели показывает, что для надежного выделения ЭМГ сигнала на фоне шумов различного происхождения минимальное значение амплитуды ЭМГ сигнала должно быть Umin=10, 1 мк. В.
 МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Для оценки правильности и адекватности предложенной модели были проведены исследования с использованием методов численного моделирования…
МОДЕЛЬ ОПИСЫВАЕТСЯ УРАВНЕНИЕМ: Для оценки правильности и адекватности предложенной модели были проведены исследования с использованием методов численного моделирования…
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; средняя амплитуда – 449, 61 и 461, 91 мк. В для электродов площадью 10 кв. мм и 20 кв. мм соответственно, максимальное отклоненное моделируемого сигнала от фактического – 24, 38 мк. В, максимальная усредненная относительная погрешность моделирования – 5, 14%
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; средняя амплитуда – 449, 61 и 461, 91 мк. В для электродов площадью 10 кв. мм и 20 кв. мм соответственно, максимальное отклоненное моделируемого сигнала от фактического – 24, 38 мк. В, максимальная усредненная относительная погрешность моделирования – 5, 14%
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; смещение частотного диапазона ЭМГ сигнала в сторону высоких частот с уменьшением толщины слоя подкожного жира, уменьшение амплитуды до 13, 61 мк. В при толщине слоя жира 20 мм
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; смещение частотного диапазона ЭМГ сигнала в сторону высоких частот с уменьшением толщины слоя подкожного жира, уменьшение амплитуды до 13, 61 мк. В при толщине слоя жира 20 мм
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; На рис. 2(след. слайд) представлена зависимость средней амплитуды моделируемого ЭМГ сигнала от глубины залегания мышцы
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; На рис. 2(след. слайд) представлена зависимость средней амплитуды моделируемого ЭМГ сигнала от глубины залегания мышцы
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц;
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц;
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; • Анализ полученных при численном моделировании результатов позволяет сделать вывод о том, что при увеличении площади электрода и межэлектродного расстояния происходит увеличение значений как средней На рис. 3(след. слайд) приведены графики амплитуды ЭМГ сигнала, так и процента перекрестных помех. зависимостей средней амплитуды и уровня перекрестных помех моделируемого ЭМГ сигнала от расстояния между электродами.
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; • Анализ полученных при численном моделировании результатов позволяет сделать вывод о том, что при увеличении площади электрода и межэлектродного расстояния происходит увеличение значений как средней На рис. 3(след. слайд) приведены графики амплитуды ЭМГ сигнала, так и процента перекрестных помех. зависимостей средней амплитуды и уровня перекрестных помех моделируемого ЭМГ сигнала от расстояния между электродами.
 Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; • Анализ полученных при численном моделировании результатов позволяет сделать вывод о том, что при увеличении площади электрода и межэлектродного расстояния происходит увеличение значений как средней амплитуды ЭМГ сигнала, так и процента перекрестных помех.
Результаты исследования: • Основные характеристики ЭМГ сигнала, сгенерированного с помощью предложенной математической модели, соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала величины толщины слоя подкожного жира в целом соответствуют известным экспериментальным данным; • Результаты анализа степени влияния на характеристики моделируемого ЭМГ сигнала средней величины расстояния от слоя подкожного жира до слоя моделируемой мышцы показывают, что ЭМГ сигнал от мышц, расположенных на расстоянии более 20 25 мм от поверхности кожи фактически полностью поглощается тканями организма, что соответствует известному из практического опыта факту большой сложности регистрации на поверхности кожи ЭМГ сигналов от глубоко лежащих мышц; • Анализ полученных при численном моделировании результатов позволяет сделать вывод о том, что при увеличении площади электрода и межэлектродного расстояния происходит увеличение значений как средней амплитуды ЭМГ сигнала, так и процента перекрестных помех.
 ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов.
ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов.
 ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации.
ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации.
 ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации. Один из способов решения этой проблемы: использовать в качестве входных сигналов не только ЭМГ сигналы, но и различные корреляционные зависимости между ЭМГ сигналами, имеющие место быть при выполнении однотипных движений.
ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации. Один из способов решения этой проблемы: использовать в качестве входных сигналов не только ЭМГ сигналы, но и различные корреляционные зависимости между ЭМГ сигналами, имеющие место быть при выполнении однотипных движений.
 ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации. Один из способов решения этой проблемы: использовать в качестве входных сигналов не только ЭМГ сигналы, но и различные корреляционные зависимости между ЭМГ сигналами, имеющие место быть при выполнении однотипных движений. Одним из эффективным методов анализа и обработки таких зависимостей могут быть различные способы и алгоритмы распознавания образов.
ВЫВОД ИЗ РЕЗУЛЬТАТОВ ИССЛЕДОВАНИЙ: Анализ математической модели генерации ЭМГ сигнала показывает, что ЭМГ сигналы, генерируемые глубоко лежащими мышцами, зарегистрировать на поверхности практически невозможно. Правомерно сделать вывод о принципиальной невозможности получения информативных ЭМГ сигналов от большинства мышц с помощью поверхностных электродов. Это приводит к тому, что в традиционных ИИСУБП наблюдается значительный дефицит входной информации. Один из способов решения этой проблемы: использовать в качестве входных сигналов не только ЭМГ сигналы, но и различные корреляционные зависимости между ЭМГ сигналами, имеющие место быть при выполнении однотипных движений. Одним из эффективным методов анализа и обработки таких зависимостей могут быть различные способы и алгоритмы распознавания образов.
 ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП:
ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП:
 ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП: Данная математическая модель ИИСУБП построена на предположении о том, что ИИСУБП реализует алгоритм распознавания типа движения по зарегистрированным ЭМГ сигналам, а величина регулирующего воздействия на исполнительный механизм (ИМ) зависит как от заданного значения интенсивности, так и от текущего значения интенсивности реализуемого ИМ движения.
ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП: Данная математическая модель ИИСУБП построена на предположении о том, что ИИСУБП реализует алгоритм распознавания типа движения по зарегистрированным ЭМГ сигналам, а величина регулирующего воздействия на исполнительный механизм (ИМ) зависит как от заданного значения интенсивности, так и от текущего значения интенсивности реализуемого ИМ движения.
 ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП: Основные значимые для построения ИИСУБП функции, прежде всего, являются следующие: • функции формирования входного вектора признаков из регистрируемых ЭМГ сигналов; • функция определения вида движения; • функция, определяющая требуемую интенсивность движения по входным ЭМГ сигналам.
ОБЩАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ИИСУБП: Основные значимые для построения ИИСУБП функции, прежде всего, являются следующие: • функции формирования входного вектора признаков из регистрируемых ЭМГ сигналов; • функция определения вида движения; • функция, определяющая требуемую интенсивность движения по входным ЭМГ сигналам.
 ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП:
ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП:
 ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • • • Схема реализует принцип интеграции методов распознавания образов и методов пропорционального управления требуемыми параметрами движения протеза; Схема отличается возможностями реализации большего количества движений (до 6) и плавного регулирования их интенсивности; Схема отличается тем, что позволяет снизить требования к техническим средствам, требуемым для ее реализации благодаря значительному уменьшению объема необходимых
ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • • • Схема реализует принцип интеграции методов распознавания образов и методов пропорционального управления требуемыми параметрами движения протеза; Схема отличается возможностями реализации большего количества движений (до 6) и плавного регулирования их интенсивности; Схема отличается тем, что позволяет снизить требования к техническим средствам, требуемым для ее реализации благодаря значительному уменьшению объема необходимых
 ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • Схема реализует принцип интеграции методов Основная трудность практической реализации распознавания образов и методов пропорционального ИИСУБП с предложенной структурой: управления требуемыми Значительная чувствительность методов выделения параметрами движения протеза; из ЭМГ сигналов информативных параметров и Схема отличается методов распознавания типа • движения по его возможностями реализации биоэлектрическому образу к уровню интенсивности большего количества движений (до 6) и плавного желаемого движения. регулирования их интенсивности; • Схема отличается тем, что позволяет снизить требования к техническим средствам, требуемым для ее реализации благодаря значительному уменьшению объема необходимых
ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • Схема реализует принцип интеграции методов Основная трудность практической реализации распознавания образов и методов пропорционального ИИСУБП с предложенной структурой: управления требуемыми Значительная чувствительность методов выделения параметрами движения протеза; из ЭМГ сигналов информативных параметров и Схема отличается методов распознавания типа • движения по его возможностями реализации биоэлектрическому образу к уровню интенсивности большего количества движений (до 6) и плавного желаемого движения. регулирования их интенсивности; • Схема отличается тем, что позволяет снизить требования к техническим средствам, требуемым для ее реализации благодаря значительному уменьшению объема необходимых
 ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • Схема реализует принцип интеграции методов Основная трудность практической реализации распознавания образов и методов пропорционального ИИСУБП с предложенной структурой: управления требуемыми Значительная чувствительность методов выделения параметрами движения протеза; из ЭМГ сигналов информативных параметров и Схема отличается методов распознавания типа • движения по его возможностями реализации биоэлектрическому образу к уровню интенсивности большего количества движений (до 6) и плавного желаемого движения. регулирования их интенсивности; Предлагается для решения данной • проблемы применять методы Схема отличается тем, что позволяет снизить формирования вектора входных требования к техническим параметров для РС, которые средствам, требуемым для ее реализации благодаря нечувствительны к различию в степени значительному уменьшению интенсивности движения. объема необходимых
ОБЩАЯ СТРУКТУРНАЯ СХЕМА ИИСУБП: • Схема реализует принцип интеграции методов Основная трудность практической реализации распознавания образов и методов пропорционального ИИСУБП с предложенной структурой: управления требуемыми Значительная чувствительность методов выделения параметрами движения протеза; из ЭМГ сигналов информативных параметров и Схема отличается методов распознавания типа • движения по его возможностями реализации биоэлектрическому образу к уровню интенсивности большего количества движений (до 6) и плавного желаемого движения. регулирования их интенсивности; Предлагается для решения данной • проблемы применять методы Схема отличается тем, что позволяет снизить формирования вектора входных требования к техническим параметров для РС, которые средствам, требуемым для ее реализации благодаря нечувствительны к различию в степени значительному уменьшению интенсивности движения. объема необходимых
 МЕТОД: Используется метод определения требуемой интенсивности движения по времени превышения значения ЭМГ сигнала заранее заданного порога.
МЕТОД: Используется метод определения требуемой интенсивности движения по времени превышения значения ЭМГ сигнала заранее заданного порога.
 МЕТОД: Используется метод определения требуемой интенсивности движения по времени превышения значения ЭМГ сигнала заранее заданного порога. Преимущества данного метода: • Больший динамический диапазон(Kд – до 38, 5); • Большая помехоустойчивость; • Простота технической реализации; • Простота настройки системы усиления.
МЕТОД: Используется метод определения требуемой интенсивности движения по времени превышения значения ЭМГ сигнала заранее заданного порога. Преимущества данного метода: • Больший динамический диапазон(Kд – до 38, 5); • Большая помехоустойчивость; • Простота технической реализации; • Простота настройки системы усиления.
 КОНСТРУКЦИЯ ЭЛЕКТРОДОВ И УБП
КОНСТРУКЦИЯ ЭЛЕКТРОДОВ И УБП
 КОНСТРУКЦИЯ ЭЛЕКТРОДОВ И УБП Достоинства конструкции: • активные электроды могут легко и быстро устанавливаться и извлекаться благодаря особой конструкции эластичного рукава 2, это обеспечивает быстроту установки и снятия всего протеза в целом; • благодаря множественной перфорации в эластичном рукаве 2 есть возможность подбирать наилучшее расположение датчиков, располагая их в местах, обеспечивающих высокий уровень сигнала и избирательность к сокращению определенных групп мышц; • гладкие выпуклые электроды активных датчиков 4 не раздражают и не травмируют кожу, и в то же время, они надежно прижаты; • простота изготовления и использования.
КОНСТРУКЦИЯ ЭЛЕКТРОДОВ И УБП Достоинства конструкции: • активные электроды могут легко и быстро устанавливаться и извлекаться благодаря особой конструкции эластичного рукава 2, это обеспечивает быстроту установки и снятия всего протеза в целом; • благодаря множественной перфорации в эластичном рукаве 2 есть возможность подбирать наилучшее расположение датчиков, располагая их в местах, обеспечивающих высокий уровень сигнала и избирательность к сокращению определенных групп мышц; • гладкие выпуклые электроды активных датчиков 4 не раздражают и не травмируют кожу, и в то же время, они надежно прижаты; • простота изготовления и использования.
 ХАРАКТЕРИСТИКА КОНСТРУКЦИЙ АКТИВНЫХ ЭЛЕКТРОДОВ
ХАРАКТЕРИСТИКА КОНСТРУКЦИЙ АКТИВНЫХ ЭЛЕКТРОДОВ
 ХАРАКТЕРИСТИКА КОНСТРУКЦИЙ АКТИВНЫХ ЭЛЕКТРОДОВ
ХАРАКТЕРИСТИКА КОНСТРУКЦИЙ АКТИВНЫХ ЭЛЕКТРОДОВ
 ОБЩИЕ ЗАКОНОМЕРНОСТИ АНАЛИЗА ДАННЫХ: • Величина ЭМГ сигнала увеличивается с увеличением площади электрода и межэлектродного расстояния; • Уровень перекрестных помех увеличивается с увеличением площади электрода и межэлектродного расстояния; • На небольших отрезках времени (10 30 минут) форма электрода не оказывает существенного влияния на стабильность регистрации ЭМГ сигнала.
ОБЩИЕ ЗАКОНОМЕРНОСТИ АНАЛИЗА ДАННЫХ: • Величина ЭМГ сигнала увеличивается с увеличением площади электрода и межэлектродного расстояния; • Уровень перекрестных помех увеличивается с увеличением площади электрода и межэлектродного расстояния; • На небольших отрезках времени (10 30 минут) форма электрода не оказывает существенного влияния на стабильность регистрации ЭМГ сигнала.
 ОБЩИЕ ЗАКОНОМЕРНОСТИ АНАЛИЗА ДАННЫХ: • Величина ЭМГ сигнала увеличивается с увеличением площади электрода и межэлектродного расстояния; • Уровень перекрестных помех увеличивается с увеличением площади электрода и межэлектродного расстояния; • На небольших отрезках времени (10 30 минут) форма электрода не оказывает существенного влияния на стабильность регистрации ЭМГ Отсюда можно сформулировать ВЫВОД: сигнала. В ИИСУБП целесообразно применять активные электроды размером квадратные формы размером 5 х5 мм с межэлектродным расстоянием 10 мм.
ОБЩИЕ ЗАКОНОМЕРНОСТИ АНАЛИЗА ДАННЫХ: • Величина ЭМГ сигнала увеличивается с увеличением площади электрода и межэлектродного расстояния; • Уровень перекрестных помех увеличивается с увеличением площади электрода и межэлектродного расстояния; • На небольших отрезках времени (10 30 минут) форма электрода не оказывает существенного влияния на стабильность регистрации ЭМГ Отсюда можно сформулировать ВЫВОД: сигнала. В ИИСУБП целесообразно применять активные электроды размером квадратные формы размером 5 х5 мм с межэлектродным расстоянием 10 мм.
 Для примера рассмотрим алгоритм, реализующий естественное управление движением схват/раскрытие…
Для примера рассмотрим алгоритм, реализующий естественное управление движением схват/раскрытие…
 АЛГОРИТМ, РЕАЛИЗУЮЩИЙ ЕСТЕСТВЕННОЕ УПРАВЛЕНИЕ ДВИЖЕНИЕМ СХВАТ/РАСКРЫТИЕ. Степень схвата/раскрытия описывается углом ϕ между текущим положением проксимальных фаланг пальцев руки и их положением в расслабленном состоянии. Примем угол схвата/раскрытия положительным, если кисть сжимается относительно положения в расслабленном состоянии, и отрицательным, если кисть разжимается. Угол схвата/раскрытия определяется укорочением мышц. Скорость укорочения мышцы входит в уравнение Хилла: Алгоритм управления движением схват/раскрытие.
АЛГОРИТМ, РЕАЛИЗУЮЩИЙ ЕСТЕСТВЕННОЕ УПРАВЛЕНИЕ ДВИЖЕНИЕМ СХВАТ/РАСКРЫТИЕ. Степень схвата/раскрытия описывается углом ϕ между текущим положением проксимальных фаланг пальцев руки и их положением в расслабленном состоянии. Примем угол схвата/раскрытия положительным, если кисть сжимается относительно положения в расслабленном состоянии, и отрицательным, если кисть разжимается. Угол схвата/раскрытия определяется укорочением мышц. Скорость укорочения мышцы входит в уравнение Хилла: Алгоритм управления движением схват/раскрытие.
. Алгоритм управления движением схват/раскрытие.") Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Алгоритм управления движением схват/раскрытие.
Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Алгоритм управления движением схват/раскрытие.
. Выражение можно записать как функцию, зависящую") Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды Алгоритм управления движением схват/раскрытие.
Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды Алгоритм управления движением схват/раскрытие.
. Выражение можно записать как функцию, зависящую") Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Алгоритм управления движением схват/раскрытие.
Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Алгоритм управления движением схват/раскрытие.
. Выражение можно записать как функцию, зависящую") Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Скорость вращательного движения проксимальных фаланг пальцев при отсутствии внешней нагрузки: Алгоритм управления движением схват/раскрытие.
Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Скорость вращательного движения проксимальных фаланг пальцев при отсутствии внешней нагрузки: Алгоритм управления движением схват/раскрытие.
. Выражение можно записать как функцию, зависящую") Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Скорость вращательного движения проксимальных фаланг пальцев при отсутствии внешней нагрузки: Следовательно, угол схвата/раскрытия при отсутствии внешней нагрузки Алгоритм управления движением схват/раскрытие. равен:
Сила, развиваемая мышцей(при схвате – поверхностным сгибателем пальцев). Выражение можно записать как функцию, зависящую от характеристик миограммы, а именно от амплитуды При отсутствии внешней нагрузки уравнение Хилла(1) имеет следующий вид: Скорость вращательного движения проксимальных фаланг пальцев при отсутствии внешней нагрузки: Следовательно, угол схвата/раскрытия при отсутствии внешней нагрузки Алгоритм управления движением схват/раскрытие. равен:
. Константа") Моменты времени t 1 и t 2 можно определить из миограммы (рис. 2). Константа C и вид функции устанавливаются экспериментально, Рассматривая процесс раскрытия кисти, рассуждаем аналогично. Алгоритм управления движением схват/раскрытие.
Моменты времени t 1 и t 2 можно определить из миограммы (рис. 2). Константа C и вид функции устанавливаются экспериментально, Рассматривая процесс раскрытия кисти, рассуждаем аналогично. Алгоритм управления движением схват/раскрытие.
![На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы](https://present5.com/presentation/24354366_170830254/image-84.jpg "На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы") На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы на этом участке. Алгоритм управления движением схват/раскрытие.
На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы на этом участке. Алгоритм управления движением схват/раскрытие.
![На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы](https://present5.com/presentation/24354366_170830254/image-85.jpg "На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы") На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы на этом участке. Огибающая рассчитывается путем применения фильтра взвешенного скользящего среднего к возведенному в квадрат сигналу ЭМГ: Алгоритм управления движением схват/раскрытие.
На участке [t 1, t 2] скорость движения считается пропорциональной максимальному значению огибающей электромиограммы на этом участке. Огибающая рассчитывается путем применения фильтра взвешенного скользящего среднего к возведенному в квадрат сигналу ЭМГ: Алгоритм управления движением схват/раскрытие.
 ЛИТЕРАТУРА: • Рангайян Р. М. , «анализ биомедецинских сигналов. Практический подход» ; • Догадов А. А. , Маркова М. В. , «Алгоритм определения схвата по двухканальной электромиограммы для управления биопротезом предплечья» ; • Дахва М. С, «Биоэлектрическое копирование движений» ; • Mark R. Pitkin, «Biomechanics of Lower Limb Prosthetics» ; • Сафин Д. Р. , «Информационно измерительная система управления биоэлектрическим протезом» ;
ЛИТЕРАТУРА: • Рангайян Р. М. , «анализ биомедецинских сигналов. Практический подход» ; • Догадов А. А. , Маркова М. В. , «Алгоритм определения схвата по двухканальной электромиограммы для управления биопротезом предплечья» ; • Дахва М. С, «Биоэлектрическое копирование движений» ; • Mark R. Pitkin, «Biomechanics of Lower Limb Prosthetics» ; • Сафин Д. Р. , «Информационно измерительная система управления биоэлектрическим протезом» ;