

Строительная механика лекции 2013.pptx
- Количество слайдов: 148
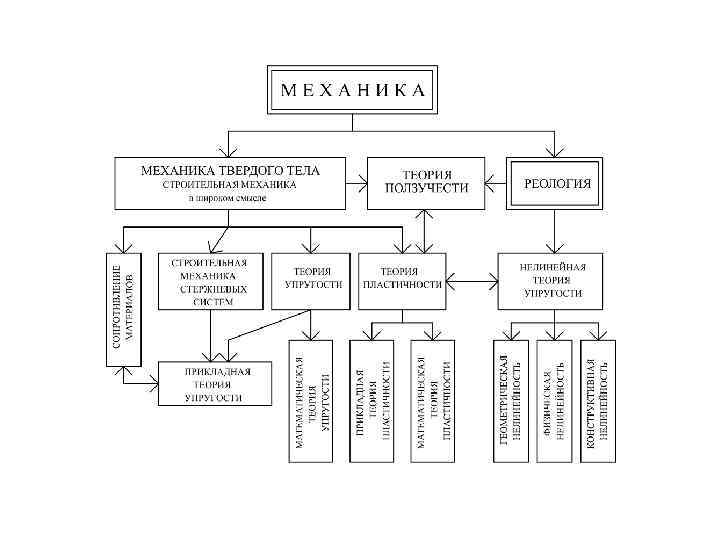
 Введение Строительная механика Все создаваемые человечеством инженерные сооружения требуют предварительного расчета, обеспечивающего надежность и долговечность их эксплуатации. Строительная механика - наука о методах расчета сооружений на прочность, устойчивость и жесткость. Строительная механика, понимаемая в широком смысле, может быть названа "теорией сооружений" или даже "механикой деформируемого твердого тела". В этом случае как отдельные ее части могут рассматриваться такие дисциплины, как сопротивление материалов, строительная механика cтержневых систем, теории упругости, пластичности и ползучести. Принципиальное различие между сопротивлением материалов и строительной механикой стержневых систем состоит в том, что в сопротивлении материалов изучается поведение под нагрузкой отдельных брусьев, а в строительной механике - систем, состоящих из брусьев, таких как фермы, рамы, арки и т. д.
Введение Строительная механика Все создаваемые человечеством инженерные сооружения требуют предварительного расчета, обеспечивающего надежность и долговечность их эксплуатации. Строительная механика - наука о методах расчета сооружений на прочность, устойчивость и жесткость. Строительная механика, понимаемая в широком смысле, может быть названа "теорией сооружений" или даже "механикой деформируемого твердого тела". В этом случае как отдельные ее части могут рассматриваться такие дисциплины, как сопротивление материалов, строительная механика cтержневых систем, теории упругости, пластичности и ползучести. Принципиальное различие между сопротивлением материалов и строительной механикой стержневых систем состоит в том, что в сопротивлении материалов изучается поведение под нагрузкой отдельных брусьев, а в строительной механике - систем, состоящих из брусьев, таких как фермы, рамы, арки и т. д.
 1. Понятия о расчетной схеме Классификация расчетных схем В строительной механике моделью сооружения служит его расчетная схема, т. е. некоторая условная идеализированная схема, которая отражает наиболее важные свойства действительного поведения сооружения при тех или иных воз действиях и не учитывает второстепенные факторы, предполагаемые несущественными. Узлы соединения Простой шарнир, представляет собой идеализацию подвижного сочленения двух элементов плоской стержневой системы. В статическом отношении простой шарнир характеризуется двумя составляющими сил взаимодействия. Если эти составляющие приняты в виде вертикальных и горизонтальных усилий, будем обозначать их соответственно V и H.
1. Понятия о расчетной схеме Классификация расчетных схем В строительной механике моделью сооружения служит его расчетная схема, т. е. некоторая условная идеализированная схема, которая отражает наиболее важные свойства действительного поведения сооружения при тех или иных воз действиях и не учитывает второстепенные факторы, предполагаемые несущественными. Узлы соединения Простой шарнир, представляет собой идеализацию подвижного сочленения двух элементов плоской стержневой системы. В статическом отношении простой шарнир характеризуется двумя составляющими сил взаимодействия. Если эти составляющие приняты в виде вертикальных и горизонтальных усилий, будем обозначать их соответственно V и H.
 Шарнирные узлы могут иметь и более сложное строение, если в узле сходятся более, чем два стержня (рис. 2. 8). В таком случае шарнир называют сложным или кратным. рис. 2. 8 Термин "кратный" вводится ввиду того, что каждый сложный шарнир можно представить в виде совокупности некоторого числа простых шарниров (рис. 2. 8, а). Следовательно, каждый сложный шарнир эквивалентен (кратен) определенному числу простых (приведенных) шарниров: это число определяет кратность сложного шарнира или приведенное число шарниров. Легко установить формулу, определяющую степень кратности сложного шарнира К через число С стержней, сходящихся в узле. К=С-1 (2. 1) Например, для узла на рис. 2. 8, б кратность шарнира равна: К=4 -1=3. Это справедливо для полного шарнира. Если же шарнир неполный (рис. 2. 8, в), то степень кратности шарнира тоже можно подсчитывать по формуле (2. 1), но при этом при подсчете числа стержней С стержни, связанные между собой, считать за один стержень. Например, для случаев, показанных на рис. 2. 8, в степень кратности равна: К=3 -1=2.
Шарнирные узлы могут иметь и более сложное строение, если в узле сходятся более, чем два стержня (рис. 2. 8). В таком случае шарнир называют сложным или кратным. рис. 2. 8 Термин "кратный" вводится ввиду того, что каждый сложный шарнир можно представить в виде совокупности некоторого числа простых шарниров (рис. 2. 8, а). Следовательно, каждый сложный шарнир эквивалентен (кратен) определенному числу простых (приведенных) шарниров: это число определяет кратность сложного шарнира или приведенное число шарниров. Легко установить формулу, определяющую степень кратности сложного шарнира К через число С стержней, сходящихся в узле. К=С-1 (2. 1) Например, для узла на рис. 2. 8, б кратность шарнира равна: К=4 -1=3. Это справедливо для полного шарнира. Если же шарнир неполный (рис. 2. 8, в), то степень кратности шарнира тоже можно подсчитывать по формуле (2. 1), но при этом при подсчете числа стержней С стержни, связанные между собой, считать за один стержень. Например, для случаев, показанных на рис. 2. 8, в степень кратности равна: К=3 -1=2.
 1. 1 Виды расчетных схем. В строительной механике выработаны некоторые общие подходы к составлению расчетных схем сооружений, основанные на приемах идеализации элементов сооружений и физических свойств их, условий их сопряжения, способах прикрепления конструкций к основанию, способах идеализации внешних воздействий и т. д. В дальнейшем мы будем называть расчетные схемы системами. 1. Стержневые системы Системы, составленные из стержней, являются стержневыми. Причем, стержни этих систем могут быть как прямыми (рис. 2. 3, а), так и криволинейными (рис. 2. 3, б). Частным случаем системы, составленной из криволинейных стержней является, например, арка (рис. 2. 3, в). рис. 2. 3
1. 1 Виды расчетных схем. В строительной механике выработаны некоторые общие подходы к составлению расчетных схем сооружений, основанные на приемах идеализации элементов сооружений и физических свойств их, условий их сопряжения, способах прикрепления конструкций к основанию, способах идеализации внешних воздействий и т. д. В дальнейшем мы будем называть расчетные схемы системами. 1. Стержневые системы Системы, составленные из стержней, являются стержневыми. Причем, стержни этих систем могут быть как прямыми (рис. 2. 3, а), так и криволинейными (рис. 2. 3, б). Частным случаем системы, составленной из криволинейных стержней является, например, арка (рис. 2. 3, в). рис. 2. 3
") Другой класс элементов, рассматриваемых в строительной механике, составляют : 2. Плоские тонкостенные конструкции (пластины) 3. Тонкостенные пространственные конструкции (оболочки)
Другой класс элементов, рассматриваемых в строительной механике, составляют : 2. Плоские тонкостенные конструкции (пластины) 3. Тонкостенные пространственные конструкции (оболочки)
 1. 2 Классификация стержневых систем Можно выделить некоторые основные типы стержневых систем, получивших наибольшее распространение в практике проектирования строительных конструкций (рис. 2. 13): а) балочные системы (балки), б) арочные системы (арки), в) рамные системы (рамы), г) рамносвязевые системы, д) фермы, е) висячие системы, ж) комбинированные системы. рис. 2. 13
1. 2 Классификация стержневых систем Можно выделить некоторые основные типы стержневых систем, получивших наибольшее распространение в практике проектирования строительных конструкций (рис. 2. 13): а) балочные системы (балки), б) арочные системы (арки), в) рамные системы (рамы), г) рамносвязевые системы, д) фермы, е) висячие системы, ж) комбинированные системы. рис. 2. 13
 Более общая классификация стержневых систем может быть проведена по двум основным признакам - кинематическому и статическому. По кинематическому признаку стержневые системы могут быть разделены на три категории: Геометрически изменяемые или кинематически подвижные - называются такие системы, в которых перемещения узлов возможны только при условии деформирования элементов. Геометрически неизменяемые или кинематиески неподвижные - системы, в которых перемещения узлов не связаны с деформированием элементов; они могут менять свою форму в зависимости от характера внешнего загружения. Мгновенно изменяемые системы - представляют собой особый класс стержневых систем, характеризующихся тем, что в этих системах могут возникать бесконечно малые перемещения без деформации элементов. По статическому признаку стержневые системы разделяются на статически определимые и статически неопределимые. Статически определимыми системами будем называть системы, усилия во всех элементах которых, в том числе и в опорных связях, могут быть определены с помощью одних уравнений равновесия. Все остальные конструкции будем относить к классу статически неопределимых.
Более общая классификация стержневых систем может быть проведена по двум основным признакам - кинематическому и статическому. По кинематическому признаку стержневые системы могут быть разделены на три категории: Геометрически изменяемые или кинематически подвижные - называются такие системы, в которых перемещения узлов возможны только при условии деформирования элементов. Геометрически неизменяемые или кинематиески неподвижные - системы, в которых перемещения узлов не связаны с деформированием элементов; они могут менять свою форму в зависимости от характера внешнего загружения. Мгновенно изменяемые системы - представляют собой особый класс стержневых систем, характеризующихся тем, что в этих системах могут возникать бесконечно малые перемещения без деформации элементов. По статическому признаку стержневые системы разделяются на статически определимые и статически неопределимые. Статически определимыми системами будем называть системы, усилия во всех элементах которых, в том числе и в опорных связях, могут быть определены с помощью одних уравнений равновесия. Все остальные конструкции будем относить к классу статически неопределимых.
 Рассмотрим основные способы идеализации связей между элементами стержневых систем. При составлении расчетных схем сооружений одиночная связь изображается в виде, показанном на рис. 2. 5 В случае, показанном на рис. 2. 5, б эта связь называется шарнирно подвижной опорой. Кинематическая характеристика одиночной связи состоит в том, что эта связь исключает возможность взаимного перемещения элементов по направлению этой связи. В статическом отношении одиночная связь характеризуется наличием усилий взаимодействия (рис. 2. 5, а), или одной опорной реакцией (рис 2. 5, б, в). На рис. 2. 5, в приведено еще одно условное изображение шарнирно подвижной опоры, принятое в учебной литературе.
Рассмотрим основные способы идеализации связей между элементами стержневых систем. При составлении расчетных схем сооружений одиночная связь изображается в виде, показанном на рис. 2. 5 В случае, показанном на рис. 2. 5, б эта связь называется шарнирно подвижной опорой. Кинематическая характеристика одиночной связи состоит в том, что эта связь исключает возможность взаимного перемещения элементов по направлению этой связи. В статическом отношении одиночная связь характеризуется наличием усилий взаимодействия (рис. 2. 5, а), или одной опорной реакцией (рис 2. 5, б, в). На рис. 2. 5, в приведено еще одно условное изображение шарнирно подвижной опоры, принятое в учебной литературе.
 В случае, показанном на рис. 2. 6, а, т. е. когда в качестве одного из элементов выступает основание, эта связь называется шарнирно неподвижной опорой. Другие способы изображения этой опоры показаны на рис. 2. 6, б. рис. 2. 6 В статическом отношении шарнирно неподвижная опора характеризуется - двумя опорными реакциями. Если эти составляющие приняты в виде вертикальных и горизонтальных усилий, будем обозначать их соответственно V и H.
В случае, показанном на рис. 2. 6, а, т. е. когда в качестве одного из элементов выступает основание, эта связь называется шарнирно неподвижной опорой. Другие способы изображения этой опоры показаны на рис. 2. 6, б. рис. 2. 6 В статическом отношении шарнирно неподвижная опора характеризуется - двумя опорными реакциями. Если эти составляющие приняты в виде вертикальных и горизонтальных усилий, будем обозначать их соответственно V и H.
 Жесткое защемление или заделка характеризуется полным уничтожением степеней свободы взаимной подвижности элементов (рис. 2. 9). рис. 2. 9 Из этого же рисунка следуют кинематические и статические характеристики жесткого узла. Таким образом, схематически жесткий узел может быть представлен в виде сочленения элементов с помощью трех связей, из которых две препятствуют линейным смещениям (простой шарнир) и одна (моментная) - угловым поворотам (рис. 2. 9, а)
Жесткое защемление или заделка характеризуется полным уничтожением степеней свободы взаимной подвижности элементов (рис. 2. 9). рис. 2. 9 Из этого же рисунка следуют кинематические и статические характеристики жесткого узла. Таким образом, схематически жесткий узел может быть представлен в виде сочленения элементов с помощью трех связей, из которых две препятствуют линейным смещениям (простой шарнир) и одна (моментная) - угловым поворотам (рис. 2. 9, а)
 Материал конструкций принимается однородным,") 1. 3 Предпосылки используемые в расчетах задач строительной механике 1) Материал конструкций принимается однородным, упругим, подчиняющимся закону Гука. - начальный модуль упругости материала Ϭ- нормальное напряжение ε- относительная деформация Закон Гука
1. 3 Предпосылки используемые в расчетах задач строительной механике 1) Материал конструкций принимается однородным, упругим, подчиняющимся закону Гука. - начальный модуль упругости материала Ϭ- нормальное напряжение ε- относительная деформация Закон Гука
 Полагаем все системы как линейно деформируемые") Фактически большинство строительных материалов характеризуется нелинейной зависимостью 2) Полагаем все системы как линейно деформируемые P Δ Δ- перемещение конструкции в заданной точке
Фактически большинство строительных материалов характеризуется нелинейной зависимостью 2) Полагаем все системы как линейно деформируемые P Δ Δ- перемещение конструкции в заданной точке
 Р, к. Н β- коэффициент пропорциональности Фактически все конструкции являются нелинейно деформируемыми системами β Δ, мм линейно деформируемая система 3) Справедливым считается принцип независимости действия сил. Принцип суперпозиции: Суммарный эффект от действия всех нагрузок равен сумме эффектов от действия каждой нагрузки в отдельности.
Р, к. Н β- коэффициент пропорциональности Фактически все конструкции являются нелинейно деформируемыми системами β Δ, мм линейно деформируемая система 3) Справедливым считается принцип независимости действия сил. Принцип суперпозиции: Суммарный эффект от действия всех нагрузок равен сумме эффектов от действия каждой нагрузки в отдельности.
 При действии сосредоточенной нагрузки в") Некоторые правила контроля при построении эпюр внутренних усилий 1) При действии сосредоточенной нагрузки в эпюре Q будет скачек, в эпюре M перегиб. 2) При действии сосредоточенного момента на эпюре M будет скачек на величину этого момента, на Q без изменений. 3) При действии распределенной нагрузки на эпюре Q наклонная линия, на M парабола выпуклость которой направлена в сторону действия нагрузки. 4) На шарнирных опорах момент равен нулю если нет сосредоточенного момента в этой точке. В заделке момент всегда есть. 5) В шарнирах момент также равен нулю, если нет сосредоточенного момента. 6) Консоли рассчитываются не зависимо.
Некоторые правила контроля при построении эпюр внутренних усилий 1) При действии сосредоточенной нагрузки в эпюре Q будет скачек, в эпюре M перегиб. 2) При действии сосредоточенного момента на эпюре M будет скачек на величину этого момента, на Q без изменений. 3) При действии распределенной нагрузки на эпюре Q наклонная линия, на M парабола выпуклость которой направлена в сторону действия нагрузки. 4) На шарнирных опорах момент равен нулю если нет сосредоточенного момента в этой точке. В заделке момент всегда есть. 5) В шарнирах момент также равен нулю, если нет сосредоточенного момента. 6) Консоли рассчитываются не зависимо.
 1. 4 Кинематический анализ сооружения Проверка геометрической неизменяемости системы Все системы могут быть геометрически неизменяемы и изменяемы. В строительных конструкциях, зданиях и сооружениях должны эксплуатироваться только геометрически неизменяемые системы. Поэтому анализ геометрической неизменяемости очень важен при любой задаче в строительной механике. Геометрически неизменяемая система не меняет своей формы при действии любых нагрузок. Деформации отдельных стержней будут иметь место. Р 1 2 3
1. 4 Кинематический анализ сооружения Проверка геометрической неизменяемости системы Все системы могут быть геометрически неизменяемы и изменяемы. В строительных конструкциях, зданиях и сооружениях должны эксплуатироваться только геометрически неизменяемые системы. Поэтому анализ геометрической неизменяемости очень важен при любой задаче в строительной механике. Геометрически неизменяемая система не меняет своей формы при действии любых нагрузок. Деформации отдельных стержней будут иметь место. Р 1 2 3
 Геометрически изменяемые системы это те которые резко меняют свою форму без деформации стержней. Р 2 Р 3 2 3 а к ор сп ра 1 4 2 1 4 3 Геометрическую неизменяемость целесообразно исследовать аналитическим путем.
Геометрически изменяемые системы это те которые резко меняют свою форму без деформации стержней. Р 2 Р 3 2 3 а к ор сп ра 1 4 2 1 4 3 Геометрическую неизменяемость целесообразно исследовать аналитическим путем.
 Любое геометрически неизменяемое тело будем называть диском. В качестве диска может приниматься любой стержень: 1. любой стержень 2. шарнирный треугольник 3. основание Рассмотрим плоские системы: y Диск имеет 3 возможных перемещения по осям x, y и поворот. C Д A W – число степеней свободы B W=3, для не закрепленного диска x Числом степеней свободы системы будем называть количество независимых возможных перемещений.
Любое геометрически неизменяемое тело будем называть диском. В качестве диска может приниматься любой стержень: 1. любой стержень 2. шарнирный треугольник 3. основание Рассмотрим плоские системы: y Диск имеет 3 возможных перемещения по осям x, y и поворот. C Д A W – число степеней свободы B W=3, для не закрепленного диска x Числом степеней свободы системы будем называть количество независимых возможных перемещений.
 Чтобы диск сделать неподвижным на плоскости нужно ввести связи препятствующие его перемещению. Чтобы данный диск сделать неподвижным 3 стержня недолжны пересекаться в одной точке. Каждый шарнир закрепляет 2 степени свободы. Для системы дисков число степеней свободы будет определяться по формуле: (1) где Д- количество дисков Ш- количество шарниров - количество опорных стержней Условие (1) это необходимое но не достаточное. Для окончательной проверки неизменности необходимо выполнить структурный анализ (сборку разборку дисков).
Чтобы диск сделать неподвижным на плоскости нужно ввести связи препятствующие его перемещению. Чтобы данный диск сделать неподвижным 3 стержня недолжны пересекаться в одной точке. Каждый шарнир закрепляет 2 степени свободы. Для системы дисков число степеней свободы будет определяться по формуле: (1) где Д- количество дисков Ш- количество шарниров - количество опорных стержней Условие (1) это необходимое но не достаточное. Для окончательной проверки неизменности необходимо выполнить структурный анализ (сборку разборку дисков).
 Для этого необходимо знать простейшие правила сборки дисков для обеспечения геометрической неизменяемости системы. Правила: 1. Если к треугольному диску присоединить 2 -мя стержнями узел, получается новая геометрически неизменяемая система. Аналогично могут присоединяться последующие узлы. 2 4 1 -2 -3 – диск 1 -2 -3 -4 – новый диск 2 -4; 3 -4 – диада стержня 1 5 3 2. A B C 1 E 2 D F геометрически неизменяемая система
Для этого необходимо знать простейшие правила сборки дисков для обеспечения геометрической неизменяемости системы. Правила: 1. Если к треугольному диску присоединить 2 -мя стержнями узел, получается новая геометрически неизменяемая система. Аналогично могут присоединяться последующие узлы. 2 4 1 -2 -3 – диск 1 -2 -3 -4 – новый диск 2 -4; 3 -4 – диада стержня 1 5 3 2. A B C 1 E 2 D F геометрически неизменяемая система
 3. С 1 С- шарнир AB- стержень 2 А 4. В С 1 в точке С- припайка 2 В 5. 1 А АВС- шарниры Вся система это новый укрупненный диск 2 3 С
3. С 1 С- шарнир AB- стержень 2 А 4. В С 1 в точке С- припайка 2 В 5. 1 А АВС- шарниры Вся система это новый укрупненный диск 2 3 С
 1. 5 Мгновенно изменяемые системы Это такие системы, которые являются изменяемыми в начальный момент приложения нагрузки. При незначительных перемещениях возникают значительные усилия, приводящие к разрушению конструкции. Эти системы могут быть при несоответствии пункта 2. 0 2 B C D A 1 Точка 0 – мгновенный центр вращения E F
1. 5 Мгновенно изменяемые системы Это такие системы, которые являются изменяемыми в начальный момент приложения нагрузки. При незначительных перемещениях возникают значительные усилия, приводящие к разрушению конструкции. Эти системы могут быть при несоответствии пункта 2. 0 2 B C D A 1 Точка 0 – мгновенный центр вращения E F
 При несоответствии пункта 5 может получится система: A B основание C 3 диска соединены тремя шарнирами, лежащими на одной прямой (в т. А, В, С).
При несоответствии пункта 5 может получится система: A B основание C 3 диска соединены тремя шарнирами, лежащими на одной прямой (в т. А, В, С).
 Задача укр. диск 1 2 A 1 3 4 укр. диск 2 5 6 7 9 8 10 Д=20 11 Ш=2+4(3 -1)+6(4 -1)=28 12 W=3∙ 20 -2∙ 28 -3=1>0 B Система геометрически изменяемая. Выполним сборку разборку дисков. Δ 1 -2 -3 – диск, присоединяем парой стержней новые узлы. 2 диска соединяются с помощью 2 -х параллельных стержней 5 -8 и 6 -7 => вся система является геометрически изменяемой системой.
Задача укр. диск 1 2 A 1 3 4 укр. диск 2 5 6 7 9 8 10 Д=20 11 Ш=2+4(3 -1)+6(4 -1)=28 12 W=3∙ 20 -2∙ 28 -3=1>0 B Система геометрически изменяемая. Выполним сборку разборку дисков. Δ 1 -2 -3 – диск, присоединяем парой стержней новые узлы. 2 диска соединяются с помощью 2 -х параллельных стержней 5 -8 и 6 -7 => вся система является геометрически изменяемой системой.
 W=3∙ 2 -2∙ 1 -4=0 A B") Задача C Д=1 Ш=1 (в точке с) W=3∙ 2 -2∙ 1 -4=0 A B Условие (1) соблюдается, система может быть геометрически неизменяема, для доказательства выполняем структурный анализ (сборку разборку дисков). Согласно (5) пункту система является геометрически неизменяемой и неподвижной относительно основания.
Задача C Д=1 Ш=1 (в точке с) W=3∙ 2 -2∙ 1 -4=0 A B Условие (1) соблюдается, система может быть геометрически неизменяема, для доказательства выполняем структурный анализ (сборку разборку дисков). Согласно (5) пункту система является геометрически неизменяемой и неподвижной относительно основания.
 2. Плоские статически определимые системы Если система не содержит линейных связей она является статически определимой. Такие системы решаются с помощью уравнения равновесия: Для статически определимых систем W=0 Статически не определимые системы содержат лишние связи, они являются более надежными в эксплуатации, но для расчета таких систем требуются дополнительные уравнения совместности деформаций. W < 0 – для статически не определимых систем.
2. Плоские статически определимые системы Если система не содержит линейных связей она является статически определимой. Такие системы решаются с помощью уравнения равновесия: Для статически определимых систем W=0 Статически не определимые системы содержат лишние связи, они являются более надежными в эксплуатации, но для расчета таких систем требуются дополнительные уравнения совместности деформаций. W < 0 – для статически не определимых систем.
 2. 1 Многопролетные статически определимые балки Эти балки часто используются в конструкциях перекрытий и покрытий, являются более экономичными чем однопролетные балки поскольку моменты ниже в 1, 5 – 2 раза. Существуют 2 основных вида исходя из их геометрической неизменяемости: 1. В одном пролете нет шарниров, во всех остальных по одному А В D F шарниру С E 2. Чередование пролетов без шарниров с пролетами по 2 шарнира (количество пролетов не четное) А В С E F D При расчете таких балок выделяют основные и второстепенные балки.
2. 1 Многопролетные статически определимые балки Эти балки часто используются в конструкциях перекрытий и покрытий, являются более экономичными чем однопролетные балки поскольку моменты ниже в 1, 5 – 2 раза. Существуют 2 основных вида исходя из их геометрической неизменяемости: 1. В одном пролете нет шарниров, во всех остальных по одному А В D F шарниру С E 2. Чередование пролетов без шарниров с пролетами по 2 шарнира (количество пролетов не четное) А В С E F D При расчете таких балок выделяют основные и второстепенные балки.
,") Основные балки крепятся к основание неподвижно (либо в двух точках, либо с помощью заделки), эти балки передают нагрузку непосредственно на основание, выделяются при кинематическом анализе конструкции. Второстепенные балки определяются на консоли основных балок или одним концом на консоль другим на основание. Исходя из этого перед расчетом составляется расчетная поэтажная схема балки. - осн. балка - вт. балки Расчет начинается с вышележащих балок
Основные балки крепятся к основание неподвижно (либо в двух точках, либо с помощью заделки), эти балки передают нагрузку непосредственно на основание, выделяются при кинематическом анализе конструкции. Второстепенные балки определяются на консоли основных балок или одним концом на консоль другим на основание. Исходя из этого перед расчетом составляется расчетная поэтажная схема балки. - осн. балка - вт. балки Расчет начинается с вышележащих балок
 Второстепенная балка 1. 1. определить VE и VF P 2 VE VF 2. построить эпюры Q и M E F нагрузка от вышележащих балок на нижележащие передается в виде реакций с обратным направлением, эти реакции считаются как известные сосредоточенные силы. Второстепенная балка 2. VD 1. определить VC и VD VC VE 2. эпюры Q и M C D Основная балка. VA A P 2 VB B VC
Второстепенная балка 1. 1. определить VE и VF P 2 VE VF 2. построить эпюры Q и M E F нагрузка от вышележащих балок на нижележащие передается в виде реакций с обратным направлением, эти реакции считаются как известные сосредоточенные силы. Второстепенная балка 2. VD 1. определить VC и VD VC VE 2. эпюры Q и M C D Основная балка. VA A P 2 VB B VC
 2. 2 Расчет 3 х шарнирных арок. Точка С – ключ или замок арки Опоры: пяты f – стрела подъема арки если • f/L ≤ 1/5 – пологая арка • f/L > 1/5 – подъемистая арка • L ≥ 30 – для ж/б арки З-х шарнирная система → распор (H) HA = HB = H
2. 2 Расчет 3 х шарнирных арок. Точка С – ключ или замок арки Опоры: пяты f – стрела подъема арки если • f/L ≤ 1/5 – пологая арка • f/L > 1/5 – подъемистая арка • L ≥ 30 – для ж/б арки З-х шарнирная система → распор (H) HA = HB = H
 Статически неопределимая арка.
Статически неопределимая арка.
 Расчетная схема колонны. Чтобы не передавать распор на нижележащие конструкции арки делаются с затяжками.
Расчетная схема колонны. Чтобы не передавать распор на нижележащие конструкции арки делаются с затяжками.
 Существуют арки с повышенной затяжкой. Ползучая арка. Стержень арки работает на сжатие с изгибом. Присутствуют все силовые факторы N, Q, M.
Существуют арки с повышенной затяжкой. Ползучая арка. Стержень арки работает на сжатие с изгибом. Присутствуют все силовые факторы N, Q, M.
 2. 3 Расчет плоских статически определимых рам P Ригель - пролет рамы Усилия: M, Q, N. Стойка МА В Элементы рамы работают: на изгиб + сжатие изгиб + растяжение М+
2. 3 Расчет плоских статически определимых рам P Ригель - пролет рамы Усилия: M, Q, N. Стойка МА В Элементы рамы работают: на изгиб + сжатие изгиб + растяжение М+
 3 -х шарнирная рама С D В С P А В P А А В D В В I II III А А С BD CD DA
3 -х шарнирная рама С D В С P А В P А А В D В В I II III А А С BD CD DA
 Опоры расположены на") Особенности определения реакций в рамах Правило знаков для построения эпюр а) Опоры расположены на одном уровне. P Вертикальная реакция: Проверка: Горизонтальная реакция: А В
Особенности определения реакций в рамах Правило знаков для построения эпюр а) Опоры расположены на одном уровне. P Вертикальная реакция: Проверка: Горизонтальная реакция: А В
 Опоры на разных уровнях. Горизонтальная реакция: В Дальше обычным способом находятся вертикальные реакции") б) Опоры на разных уровнях. Горизонтальная реакция: В Дальше обычным способом находятся вертикальные реакции А В рамах с заделкой реакции искать не обязательно, при расчете двигаться от свободных свесов.
б) Опоры на разных уровнях. Горизонтальная реакция: В Дальше обычным способом находятся вертикальные реакции А В рамах с заделкой реакции искать не обязательно, при расчете двигаться от свободных свесов.
 3 -х шарнирная рама. Опоры на одном уровне. С Вертикальная реакция: Горизонтальная реакция:") в) 3 -х шарнирная рама. Опоры на одном уровне. С Вертикальная реакция: Горизонтальная реакция: А В
в) 3 -х шарнирная рама. Опоры на одном уровне. С Вертикальная реакция: Горизонтальная реакция: А В
 Опоры на разных уровнях. С В Проверка: А") г) Опоры на разных уровнях. С В Проверка: А
г) Опоры на разных уровнях. С В Проверка: А
 Если в трехшарнирной раме сосредоточенная сила или сосредоточенный момент, то целесообразно при расчете поступать следующим образом: Р Р/2 С А Р/2 С В А В
Если в трехшарнирной раме сосредоточенная сила или сосредоточенный момент, то целесообразно при расчете поступать следующим образом: Р Р/2 С А Р/2 С В А В
 Знаки для усилий P Все знаки усилий находятся в предположении, что расчетчик стоит внутри рамы. При этом все элементы обходятся последовательно с разных сторон. А В
Знаки для усилий P Все знаки усилий находятся в предположении, что расчетчик стоит внутри рамы. При этом все элементы обходятся последовательно с разных сторон. А В
 - + + Положительные моменты в раме откладываются со стороны внутренних волокон. Поперечные силы положительные, если вращать сечение по часовой стрелке. Отрицательные – против часовой. + откладывается со стороны наружных волокон - со стороны внутренних волокон Продольная сила положительная, если действует от сечения
- + + Положительные моменты в раме откладываются со стороны внутренних волокон. Поперечные силы положительные, если вращать сечение по часовой стрелке. Отрицательные – против часовой. + откладывается со стороны наружных волокон - со стороны внутренних волокон Продольная сила положительная, если действует от сечения
 Плоские статически определимые составные рамы F D A C A B D C E B
Плоские статически определимые составные рамы F D A C A B D C E B
. 2. Расчетная схема (схема взаимодействия рам") 1. Кинематический анализ ( проверка геометрической неизменяемости, сборка-разборка). 2. Расчетная схема (схема взаимодействия рам – выделяем основную раму и второстепенную). 3. Расчет и построение эпюр M, Q , N. Для каждой части рамы делаются свои проверки. Основная рама C Второстепенная рама A B D
1. Кинематический анализ ( проверка геометрической неизменяемости, сборка-разборка). 2. Расчетная схема (схема взаимодействия рам – выделяем основную раму и второстепенную). 3. Расчет и построение эпюр M, Q , N. Для каждой части рамы делаются свои проверки. Основная рама C Второстепенная рама A B D
 По назначению: - фермы конструкций покрытия: стропильные") 2. 4 Плоские статически определимые фермы 1) По назначению: - фермы конструкций покрытия: стропильные и подстропильные - фермы мостовых конструкций 2) По характеру работы: - балочные
2. 4 Плоские статически определимые фермы 1) По назначению: - фермы конструкций покрытия: стропильные и подстропильные - фермы мостовых конструкций 2) По характеру работы: - балочные
 - консольно-балочные - арочные - комбинированные
- консольно-балочные - арочные - комбинированные
 По очертанию: - треугольная ферма - полигональная ферма") 3) По очертанию: - треугольная ферма - полигональная ферма
3) По очертанию: - треугольная ферма - полигональная ферма
 По типу решеток: - с треугольной решеткой - с раскосной решеткой (раскосы -") 4) По типу решеток: - с треугольной решеткой - с раскосной решеткой (раскосы - восходящие и нисходящие) - безраскоснные фермы
4) По типу решеток: - с треугольной решеткой - с раскосной решеткой (раскосы - восходящие и нисходящие) - безраскоснные фермы
 Шпренгельные") - полураскоснные фермы - двухраскоснные или многораскоснные фермы - со сложной решеткой (шпренгельные) Шпренгельные фермы работают на общую нагрузку, а элементы шпренгеля – на местную.
- полураскоснные фермы - двухраскоснные или многораскоснные фермы - со сложной решеткой (шпренгельные) Шпренгельные фермы работают на общую нагрузку, а элементы шпренгеля – на местную.
 Аналитические методы расчета ферм Способ вырезания узлов: если вся ферма находится в равновесии, то в равновесии будет находиться любая ее отмеченная часть, под действием внешних сил приложенных к этой части и усилий в помеченных частях. Р 5 Р Р 3 1 А 7 α d 2 4 6 8 В
Аналитические методы расчета ферм Способ вырезания узлов: если вся ферма находится в равновесии, то в равновесии будет находиться любая ее отмеченная часть, под действием внешних сил приложенных к этой части и усилий в помеченных частях. Р 5 Р Р 3 1 А 7 α d 2 4 6 8 В
 Вырезать узлы нужно последовательно, начинать где сходятся два стержня. Узел 1 1 α Направление усилий: вначале задаемся растягивающими усилиями растяжение сжатие
Вырезать узлы нужно последовательно, начинать где сходятся два стержня. Узел 1 1 α Направление усилий: вначале задаемся растягивающими усилиями растяжение сжатие
 сжатие растяжение Во всех последующих вырезанных узлах найденные усилия показывают с фактическим направлением, знаки в них берутся с плюсом. неизв. 3 изв. сжатие неизв.
сжатие растяжение Во всех последующих вырезанных узлах найденные усилия показывают с фактическим направлением, знаки в них берутся с плюсом. неизв. 3 изв. сжатие неизв.
 Некоторые упрощенные способы определения усилий в стержнях ферм Основаны на методе вырезания узлов. Правило: 1. Если в узле сходятся два стержня и узел не загружен, оба стержня нулевые. 2. Если в узле сходятся два стержня, по линии одного из них приложена сила, то усилие в примыкающем будет равно нулю, а усилие в другом равно Р. (направлена в другую сторону) Р
Некоторые упрощенные способы определения усилий в стержнях ферм Основаны на методе вырезания узлов. Правило: 1. Если в узле сходятся два стержня и узел не загружен, оба стержня нулевые. 2. Если в узле сходятся два стержня, по линии одного из них приложена сила, то усилие в примыкающем будет равно нулю, а усилие в другом равно Р. (направлена в другую сторону) Р
 3. Если в узле сходятся три стержня, два направлены по одной прямой и узел не загружен, то усилие в примыкающем стержне равно нулю. Р 8 10 6 12 4 14 2 1 3 5 7 9 11 13
3. Если в узле сходятся три стержня, два направлены по одной прямой и узел не загружен, то усилие в примыкающем стержне равно нулю. Р 8 10 6 12 4 14 2 1 3 5 7 9 11 13
 2. 5 Расчет ферм по методу сечения Согласно этого метода проводим сквозное сечение, одну часть фермы отбрасываем, а оставшуюся часть рассматриваем под действием внешних сил и внутренних усилий в рассеченных частях. Существует два способа этого метода: 1. Способ моментных точек – точек Риттера 2. Способ проекции (для ферм с параллельными поясами) P 6 P 7 3 2 K α α a 1 b 9 α 4 5 d О P l 8 10
2. 5 Расчет ферм по методу сечения Согласно этого метода проводим сквозное сечение, одну часть фермы отбрасываем, а оставшуюся часть рассматриваем под действием внешних сил и внутренних усилий в рассеченных частях. Существует два способа этого метода: 1. Способ моментных точек – точек Риттера 2. Способ проекции (для ферм с параллельными поясами) P 6 P 7 3 2 K α α a 1 b 9 α 4 5 d О P l 8 10
 За моментные точки принимаются точки, где попарно сходятся рассеченные стержни. Моментные точки 4; 6; K. Рассматриваем равновесие левой части: (сжатие) Из первой панели Δ 2 -3 -С Гипотенуза: (растяжение)
За моментные точки принимаются точки, где попарно сходятся рассеченные стержни. Моментные точки 4; 6; K. Рассматриваем равновесие левой части: (сжатие) Из первой панели Δ 2 -3 -С Гипотенуза: (растяжение)
 Δ К-0 -4 Δ К-2 -1 sinβ из Δ 4 -6 -5
Δ К-0 -4 Δ К-2 -1 sinβ из Δ 4 -6 -5
 Способ проекции P 2 P P 3 P P h 1 4 l По способу проекции: лев. части
Способ проекции P 2 P P 3 P P h 1 4 l По способу проекции: лев. части
 Особенности расчета Шпренгельных ферм Основная ферма + дополнительные шпренгельные фермы 2 Р/2 1 Р/2 4 3 P Нагрузки этой шпренгельной фермочки передаются
Особенности расчета Шпренгельных ферм Основная ферма + дополнительные шпренгельные фермы 2 Р/2 1 Р/2 4 3 P Нагрузки этой шпренгельной фермочки передаются
 2 Р 2 Р 2 Р Окончательные усилия получаются путем усилия в шпренгельной ферме и в основной ферме.
2 Р 2 Р 2 Р Окончательные усилия получаются путем усилия в шпренгельной ферме и в основной ферме.
 Особенности построения линий влияния плоских статически определимых ферм При построении линий влияния используются 2 полюсные силы. 1. Сила Р равная 1 слева от рассеченной панели 2. Сила Р справа от этой панели Получаются левая и правая ветви линий влияния, а в пределах заданной рассеченной будет передаточная ветвь. Обе ветви линий влияния пересекаются под соответствующей моментной точкой.
Особенности построения линий влияния плоских статически определимых ферм При построении линий влияния используются 2 полюсные силы. 1. Сила Р равная 1 слева от рассеченной панели 2. Сила Р справа от этой панели Получаются левая и правая ветви линий влияния, а в пределах заданной рассеченной будет передаточная ветвь. Обе ветви линий влияния пересекаются под соответствующей моментной точкой.
 Ферма трапециевидного очертания 3 x P 2 a R 1 А 4 В d b r l
Ферма трапециевидного очертания 3 x P 2 a R 1 А 4 В d b r l
 передаточная ветвь из подобия Δ-ков лев. ветвь пр. ветвь + + пр. ветвь лев. ветвь передаточная ветвь из подобия Δ-ков продолжение л. в. передаточная ветвь из подобия Δ-ков
передаточная ветвь из подобия Δ-ков лев. ветвь пр. ветвь + + пр. ветвь лев. ветвь передаточная ветвь из подобия Δ-ков продолжение л. в. передаточная ветвь из подобия Δ-ков
 сила слева (см. рис) левая") Моментные точки: 1; 3; К 1 смотреть балку а) сила слева (см. рис) левая ветвь 1
Моментные точки: 1; 3; К 1 смотреть балку а) сила слева (см. рис) левая ветвь 1
 сила справа (см. рис) x 3 P=1 2 А 1 В 4 правая") б) сила справа (см. рис) x 3 P=1 2 А 1 В 4 правая ветвь
б) сила справа (см. рис) x 3 P=1 2 А 1 В 4 правая ветвь
 сила слева (см. рис) б) сила справа (см. рис) Линия") Моментная точка 1 а) сила слева (см. рис) б) сила справа (см. рис) Линия влияния в раскосе сила слева сила справа Определение усилий в стержнях фермы по линиям влияния.
Моментная точка 1 а) сила слева (см. рис) б) сила справа (см. рис) Линия влияния в раскосе сила слева сила справа Определение усилий в стержнях фермы по линиям влияния.
 3. Особенности расчетных сооружений на подвижную нагрузку. Понятие о линиях влияниях. Расчет на неподвижную нагрузку может производиться с помощью эпюр и линий влияния. Линия влияния какого либо VA x VB P усилия называется график изменения этого усилия в A B зависимости от положения движущейся единичной силы Р = 1 При построении эпюр переменной будет координата сечения “x”. При построении линий влияния переменной координатой будет точка приложения одиночной силы Р “x”.
3. Особенности расчетных сооружений на подвижную нагрузку. Понятие о линиях влияниях. Расчет на неподвижную нагрузку может производиться с помощью эпюр и линий влияния. Линия влияния какого либо VA x VB P усилия называется график изменения этого усилия в A B зависимости от положения движущейся единичной силы Р = 1 При построении эпюр переменной будет координата сечения “x”. При построении линий влияния переменной координатой будет точка приложения одиночной силы Р “x”.
 от сосредоточенных") 3. 1 Определение усилий от заданной нагрузки с помощью линий влияний. А) от сосредоточенных сил Sk – обобщенные усилия в сечении k (M, Q и др. ) Sk = P*y 1 + … + Pn*yn = Если сила направлена вверх ↑, принимается со знаком «-» . Ордината y, тоже берется со своими знаками.
3. 1 Определение усилий от заданной нагрузки с помощью линий влияний. А) от сосредоточенных сил Sk – обобщенные усилия в сечении k (M, Q и др. ) Sk = P*y 1 + … + Pn*yn = Если сила направлена вверх ↑, принимается со знаком «-» . Ордината y, тоже берется со своими знаками.
 от распределенной нагрузки. Sk = qi * Wi Wi – площадь участка линии") Б) от распределенной нагрузки. Sk = qi * Wi Wi – площадь участка линии влияния расположенной под распределенной нагрузкой принимается с учетом знака В) от сосредоточенного момента М → пара сил с плечом d P 1 = P 2 = M/d , d = 1 d – вылет консоли
Б) от распределенной нагрузки. Sk = qi * Wi Wi – площадь участка линии влияния расположенной под распределенной нагрузкой принимается с учетом знака В) от сосредоточенного момента М → пара сил с плечом d P 1 = P 2 = M/d , d = 1 d – вылет консоли
 4 Основы теории перемещений 4. 1 Понятие о перемещениях: Перемещением какой-либо точки называется изменение координаты в процессе перемещения. Δ max По характеру воздействия: - силовые - объемные (от колебания t, от усадки бетона) - от неравномерной усадки опор По виду: - линейные (вертикальные, горизонтальные) - угловые Δ – перемещение точки по заданному направлению.
4 Основы теории перемещений 4. 1 Понятие о перемещениях: Перемещением какой-либо точки называется изменение координаты в процессе перемещения. Δ max По характеру воздействия: - силовые - объемные (от колебания t, от усадки бетона) - от неравномерной усадки опор По виду: - линейные (вертикальные, горизонтальные) - угловые Δ – перемещение точки по заданному направлению.
 Предпосылки для определения перемещения 1. Системы линейно-деформируемые, между Р и ∆ линейная зависимость. P P, к. Н α – коэффициент пропорциональности. Δ=αР α Δ, мм 2. Справедливым будет принцип независимости действия сил. Перемещение определяется из условия равенства работ внешних и внутренних сил или система находится в равновесии.
Предпосылки для определения перемещения 1. Системы линейно-деформируемые, между Р и ∆ линейная зависимость. P P, к. Н α – коэффициент пропорциональности. Δ=αР α Δ, мм 2. Справедливым будет принцип независимости действия сил. Перемещение определяется из условия равенства работ внешних и внутренних сил или система находится в равновесии.
 4. 2 Действительная работа внешних сил Все работы делятся на два вида: действительные и возможные Действительные – совершаются силами на перемещении вызванных этими же силами. P Δ – движение по направлению силы Р от действительной Р. А – действительная работа внешней силы. αР A-? (1) d. A dΔ – приращение перемещения β Δ dΔ Δ d. A – элементарная работа, совершает сила Р на dΔ
4. 2 Действительная работа внешних сил Все работы делятся на два вида: действительные и возможные Действительные – совершаются силами на перемещении вызванных этими же силами. P Δ – движение по направлению силы Р от действительной Р. А – действительная работа внешней силы. αР A-? (1) d. A dΔ – приращение перемещения β Δ dΔ Δ d. A – элементарная работа, совершает сила Р на dΔ
 (3) (4) (5) (6) Из формулы (1) записываем коэффициент α. (7) (8) (9)") (2) (3) (4) (5) (6) Из формулы (1) записываем коэффициент α. (7) (8) (9) Теорема Клапейрона – о действительной работе внешней силы При определении перемещения вводится понятие обобщенная сила и обобщенное перемещение. Все действующие нагрузки можно характеризовать как обобщенную силу.
(2) (3) (4) (5) (6) Из формулы (1) записываем коэффициент α. (7) (8) (9) Теорема Клапейрона – о действительной работе внешней силы При определении перемещения вводится понятие обобщенная сила и обобщенное перемещение. Все действующие нагрузки можно характеризовать как обобщенную силу.
 4. 3 Действительная работа внутренних сил U – действительная работа внутренних сил. Направлена в противоположном направлении работе внешних сил, в формулах должен учитываться знак «-» Q Δ dϕ M M N N Q d. S
4. 3 Действительная работа внутренних сил U – действительная работа внутренних сил. Направлена в противоположном направлении работе внешних сил, в формулах должен учитываться знак «-» Q Δ dϕ M M N N Q d. S
 (2) (3) (4) (5)") Взаимный угол поворота граней угл. d. S - Δdϕ (1) (2) (3) (4) (5) (6) (7) S – длина участка µ - коэффициент неравномерного сдвига по высоте сечения Δdγ – взаимный сдвиг сечения Е А – осевая жесткость E J - изгибная жесткость G A – сдвиговая жесткость Е - начальный модуль упругости G – модуль сдвига
Взаимный угол поворота граней угл. d. S - Δdϕ (1) (2) (3) (4) (5) (6) (7) S – длина участка µ - коэффициент неравномерного сдвига по высоте сечения Δdγ – взаимный сдвиг сечения Е А – осевая жесткость E J - изгибная жесткость G A – сдвиговая жесткость Е - начальный модуль упругости G – модуль сдвига
 n - количество участков элемента i - номер участка 4. 4 Потенциальная энергия") (8) n - количество участков элемента i - номер участка 4. 4 Потенциальная энергия системы Если система находится в равновесии работа внутренних сил превращается в потенциальную энергию, которая накапливается в процессе деформирования. (9) W – потенциальная энергия по направлению противоположна работе внутренних сил. Всегда принимается со знаком «+» .
(8) n - количество участков элемента i - номер участка 4. 4 Потенциальная энергия системы Если система находится в равновесии работа внутренних сил превращается в потенциальную энергию, которая накапливается в процессе деформирования. (9) W – потенциальная энергия по направлению противоположна работе внутренних сил. Всегда принимается со знаком «+» .
 4. 5 Возможная работа внешних и внутренних сил Возможная работа совершается силами на перемещениях вызванных другими силами. Перемещения производящие под действием других сил называется возможным перемещением. Δ Δ 12 – возможное перемещение силы P 1 от действия силы P 2. Δiy i – по какому направлению y – от чего Возможные работы силы P 1 на перемещение Δ 12 A 12=P 1·Δ 12 (1)
4. 5 Возможная работа внешних и внутренних сил Возможная работа совершается силами на перемещениях вызванных другими силами. Перемещения производящие под действием других сил называется возможным перемещением. Δ Δ 12 – возможное перемещение силы P 1 от действия силы P 2. Δiy i – по какому направлению y – от чего Возможные работы силы P 1 на перемещение Δ 12 A 12=P 1·Δ 12 (1)
 Δ Δ 21 – возможная работа P 2 от перемещения, возможном на P 1. A 21=P 2·Δ 21 (2) Порядок приложения сил не влияет на конечное напряженно деформированное состояние элементов, соответственно будут равны в первом и втором состоянии. A 12=A 21 (3) P 1·Δ 12=P 2·Δ 21 Теорема о взаимности работ Бетти (4) Если принять силы P=1 Δ 12=Δ 21 (5) Теорема о взаимности перемещений Максвелла
Δ Δ 21 – возможная работа P 2 от перемещения, возможном на P 1. A 21=P 2·Δ 21 (2) Порядок приложения сил не влияет на конечное напряженно деформированное состояние элементов, соответственно будут равны в первом и втором состоянии. A 12=A 21 (3) P 1·Δ 12=P 2·Δ 21 Теорема о взаимности работ Бетти (4) Если принять силы P=1 Δ 12=Δ 21 (5) Теорема о взаимности перемещений Максвелла
 U 12 – возможная работа сил 1 -го") Рассмотрим возможную работу внутренних сил. (6) U 12 – возможная работа сил 1 -го состояния на перемещение 2 -го состояния. N 1; M 1; Q 1 – усилия от действия сил 1 -го состояния. N 2; M 2; Q 2 – усилия от действия сил 2 -го состояния. Если система находится в равновесии, то в ее бесконечно малых перемещениях будет наблюдаться равенство возможных работ внешних и внутренних сил.
Рассмотрим возможную работу внутренних сил. (6) U 12 – возможная работа сил 1 -го состояния на перемещение 2 -го состояния. N 1; M 1; Q 1 – усилия от действия сил 1 -го состояния. N 2; M 2; Q 2 – усилия от действия сил 2 -го состояния. Если система находится в равновесии, то в ее бесконечно малых перемещениях будет наблюдаться равенство возможных работ внешних и внутренних сил.
 В формулу (7) подставляем значения из формул") Принцип возможных перемещений A 12=U 12 (7) В формулу (7) подставляем значения из формул (1) и (6). (8) (9) Δ 12 - возможное перемещение по направлению единичной силы Р 1, от действия силы Р 2. Формула Мора для определения перемещения. N 1; M 1; Q 1 – усилия от единичной силы Р 1.
Принцип возможных перемещений A 12=U 12 (7) В формулу (7) подставляем значения из формул (1) и (6). (8) (9) Δ 12 - возможное перемещение по направлению единичной силы Р 1, от действия силы Р 2. Формула Мора для определения перемещения. N 1; M 1; Q 1 – усилия от единичной силы Р 1.
 h q Заданное Состояние (М 2)") 4. 6 Способы определения перемещений C D (1) h q Заданное Состояние (М 2) A l N, Q – пренебречь. B Δ 12 – перемещение точки по направлению единичной силы, от действия сил состояния 2.
4. 6 Способы определения перемещений C D (1) h q Заданное Состояние (М 2) A l N, Q – пренебречь. B Δ 12 – перемещение точки по направлению единичной силы, от действия сил состояния 2.
 C P=1 D Выражение моментов М 1, М 2 по участкам в каждом состоянии. Единичное Состояние (Эп М 1) A B
C P=1 D Выражение моментов М 1, М 2 по участкам в каждом состоянии. Единичное Состояние (Эп М 1) A B
 Задача q 2 сост A B C EJ=const l 1 сост A Р=1 C B 2 уч. AC; BC (по l/2)
Задача q 2 сост A B C EJ=const l 1 сост A Р=1 C B 2 уч. AC; BC (по l/2)
") 4. 7 Определение перемещений по способу перемножения эпюр Правило Верещагина В формуле Мора (1) при интегрировании получается произведение эпюр моментов. - произведение Эп моментов (2) Ц. т. • a b -площадь одной из эпюр Моментов (при наличии Криволинейной, площадь берется для нее) -ордината из взята под центром тяжести другой эпюры.
4. 7 Определение перемещений по способу перемножения эпюр Правило Верещагина В формуле Мора (1) при интегрировании получается произведение эпюр моментов. - произведение Эп моментов (2) Ц. т. • a b -площадь одной из эпюр Моментов (при наличии Криволинейной, площадь берется для нее) -ордината из взята под центром тяжести другой эпюры.
 • Формула Симпсона a c 1. Строим эпюры моментов 2. Разбивка на участки. 3. d b (3)
• Формула Симпсона a c 1. Строим эпюры моментов 2. Разбивка на участки. 3. d b (3)
 4. 8 Определение перемещений от неравномерной осадки опор C Используя принцип возможных перемещений. К Н (1) h C A B В‛ Р=1 К A B
4. 8 Определение перемещений от неравномерной осадки опор C Используя принцип возможных перемещений. К Н (1) h C A B В‛ Р=1 К A B
 (3) Р=1 (4) Под знаком суммы: -если реакция совпадает с направлением перемещенной опоры") (2) (3) Р=1 (4) Под знаком суммы: -если реакция совпадает с направлением перемещенной опоры «+» - если не совпадает «-»
(2) (3) Р=1 (4) Под знаком суммы: -если реакция совпадает с направлением перемещенной опоры «+» - если не совпадает «-»
 5. Статически неопределимые системы 5. 1 Общие сведения Статически неопределимые системы содержат линии связи Л=ССН=W=2 Ш+Соп-3 Д Д=1 ССН=1 Ш=0 Соп=4 Д=4 Ш=3 Соп=8 Л=ССН=2*3+8 -12=6+8 -12=2 Системы бывают внешне и внутренне статически неопределимые
5. Статически неопределимые системы 5. 1 Общие сведения Статически неопределимые системы содержат линии связи Л=ССН=W=2 Ш+Соп-3 Д Д=1 ССН=1 Ш=0 Соп=4 Д=4 Ш=3 Соп=8 Л=ССН=2*3+8 -12=6+8 -12=2 Системы бывают внешне и внутренне статически неопределимые
") Содержат линии опорные связи Л=ССН=2 Л=ССН+2 (внутренняя статическая неопределимость)
Содержат линии опорные связи Л=ССН=2 Л=ССН+2 (внутренняя статическая неопределимость)
 Замкнутый контур статически 3 раза неопределим Нужно для расчета сделать сквозное сечение X 1 X 2 X 3 -неизвестные внутренние усилия X 1 X 3 X 2 X 1 X 3
Замкнутый контур статически 3 раза неопределим Нужно для расчета сделать сквозное сечение X 1 X 2 X 3 -неизвестные внутренние усилия X 1 X 3 X 2 X 1 X 3
 Ш-количество шарниров") В этих контурах включается система совместно с основанием К=2 (количество замкнутых контуров) Ш-количество шарниров - одинарный -двойной шарнир Л=ССН=3 К-Ш (2) Ш=4 Л=ССН=6 -4=2
В этих контурах включается система совместно с основанием К=2 (количество замкнутых контуров) Ш-количество шарниров - одинарный -двойной шарнир Л=ССН=3 К-Ш (2) Ш=4 Л=ССН=6 -4=2
 Методы расчета статически неопределимых систем 1. Метод сил 2. Метод перемещений 3. Смешанные и комбинированные 5. 2 Расчет статически неопределимых систем по методу сил Заданная система EJ=const А=ССН=3 X 1 X 2 X 3 -неизвестные усилия X 2
Методы расчета статически неопределимых систем 1. Метод сил 2. Метод перемещений 3. Смешанные и комбинированные 5. 2 Расчет статически неопределимых систем по методу сил Заданная система EJ=const А=ССН=3 X 1 X 2 X 3 -неизвестные усилия X 2
 Для расчета отбрасываем лишние связи и выбираем основную систему Основная система должна быть статически определимая, геометрически неизменяемая, и по возможности должна быть простой. Составим каноническое уравнение метода сил: Перемещение по направлению отброшенных связей должны равняться нулю. Соблюдается принцип независимости сил. (1) δij-перемещения по направлению i-ой связи от j=1 (единичного перемещения) △ip-перемещение по направлению i-ой связи от нагрузки (грузового перемещения) δij- главные коэффициенты, всегда положительные.
Для расчета отбрасываем лишние связи и выбираем основную систему Основная система должна быть статически определимая, геометрически неизменяемая, и по возможности должна быть простой. Составим каноническое уравнение метода сил: Перемещение по направлению отброшенных связей должны равняться нулю. Соблюдается принцип независимости сил. (1) δij-перемещения по направлению i-ой связи от j=1 (единичного перемещения) △ip-перемещение по направлению i-ой связи от нагрузки (грузового перемещения) δij- главные коэффициенты, всегда положительные.
 для решения системы 1 ищутся все переменные согласно теории перемещения Для этого рассматриваем следующие состояния основной системы: M 1 M 2
для решения системы 1 ищутся все переменные согласно теории перемещения Для этого рассматриваем следующие состояния основной системы: M 1 M 2
 M 3 q Mp все коэффициенты находятся путем перемножения соответствующих эпюр. δ 11 - Эп М 1*Эп М 2 (2) δij-Эп Мi*Эп Мi (3)
M 3 q Mp все коэффициенты находятся путем перемножения соответствующих эпюр. δ 11 - Эп М 1*Эп М 2 (2) δij-Эп Мi*Эп Мi (3)
 затем выполняется проверка правильности определения этих коэффициентов. строится суммарная единичная эпюра моментов Мs: Мs=М 1+М 2+М 3 (4) =δij=Эп Мs*Эп Мs (5) решаем систему канонических уравнений (1) X 1; X 2; X 3 -определяем неизвестные усилия. Затем строим итоговую эпюру моментов. Эп М = Эп Мp+Эп М 1*X 1+Эп М 2*X 2+Эп М 3*X 3 (6) Выполняется проверка: 1) Статическая 2) Кинематическая M Статическая проверка осуществляется путем вырезания жестких узлов из рамы
затем выполняется проверка правильности определения этих коэффициентов. строится суммарная единичная эпюра моментов Мs: Мs=М 1+М 2+М 3 (4) =δij=Эп Мs*Эп Мs (5) решаем систему канонических уравнений (1) X 1; X 2; X 3 -определяем неизвестные усилия. Затем строим итоговую эпюру моментов. Эп М = Эп Мp+Эп М 1*X 1+Эп М 2*X 2+Эп М 3*X 3 (6) Выполняется проверка: 1) Статическая 2) Кинематическая M Статическая проверка осуществляется путем вырезания жестких узлов из рамы
 Кинематическая проверка заключается в том чтобы проверить перемещение по направлению отброшенных связей равна нулю. △= Эп М*Эп Мs≈0 - (7) -обобщенное перемещение по направлению отброшенных связей Мs=М 1+…+Мn Относительная погрешность ℰ при расчете по формуле (7) (8) А-положительное число при расчете В-отрицательное число (9) - эпюра балочных поперечных сил (Каждый участок рассматривается как однопролетная свободно опертая балка)
Кинематическая проверка заключается в том чтобы проверить перемещение по направлению отброшенных связей равна нулю. △= Эп М*Эп Мs≈0 - (7) -обобщенное перемещение по направлению отброшенных связей Мs=М 1+…+Мn Относительная погрешность ℰ при расчете по формуле (7) (8) А-положительное число при расчете В-отрицательное число (9) - эпюра балочных поперечных сил (Каждый участок рассматривается как однопролетная свободно опертая балка)
 Участок АС Мпр, Млев - моменты на правом и левом концах данного участка
Участок АС Мпр, Млев - моменты на правом и левом концах данного участка
 Участок ВД Мпр=m 4, Млев=m 3 Правило!!! Проверки эпюры Q. Если на каком то участке поворот оси производится по часовой стрелке, то Q на этом участке – положительная; если против часовойотрицательная.
Участок ВД Мпр=m 4, Млев=m 3 Правило!!! Проверки эпюры Q. Если на каком то участке поворот оси производится по часовой стрелке, то Q на этом участке – положительная; если против часовойотрицательная.
 Эпюра N строится на основании эпюры Q из условия") Построение эпюры N (продольных сил) Эпюра N строится на основании эпюры Q из условия равновесия жестких узлов рамы. + -
Построение эпюры N (продольных сил) Эпюра N строится на основании эпюры Q из условия равновесия жестких узлов рамы. + -
 5. 3. 1 Рациональный выбор основной системы метода сил система должна быть обязательно статически неопределима геометрически неизменяема. Способы выбора основной системы: 1. Путем отбрасывания лишних связей 2. Путем введения шарниров в некоторых сечениях системы 3. Способ сквозных разрезов Варианты основной системы: Заданная система 1) 2)
5. 3. 1 Рациональный выбор основной системы метода сил система должна быть обязательно статически неопределима геометрически неизменяема. Способы выбора основной системы: 1. Путем отбрасывания лишних связей 2. Путем введения шарниров в некоторых сечениях системы 3. Способ сквозных разрезов Варианты основной системы: Заданная система 1) 2)
 X 1 X 2 X 3") 3) X 1 X 2 X 3
3) X 1 X 2 X 3
 Основной критерий рационального выбора основной системы δij=0 – как можно большее количество (коэффициентов = 0) будет выполняться в том случае для симметричных систем, если часть эпюр будут симметричные, а другая часть - будут кососимметричные. Наиболее рациональная система получается по третьему варианту. При перемножении единичные эпюры моментов должны быть взаимно ортоганальными x 1, x 3 - симметричные усилия x 2 - кососимметричное усилие
Основной критерий рационального выбора основной системы δij=0 – как можно большее количество (коэффициентов = 0) будет выполняться в том случае для симметричных систем, если часть эпюр будут симметричные, а другая часть - будут кососимметричные. Наиболее рациональная система получается по третьему варианту. При перемножении единичные эпюры моментов должны быть взаимно ортоганальными x 1, x 3 - симметричные усилия x 2 - кососимметричное усилие
 5. 3. 2 Возможные упрощения при расчете статистически неопределимых систем по методу сил Использование симметрии системы Возможные упрощения при расчете также связаны с симметрией в системе. X 1 X 2 СНН=Л=2 X 1 Р Р Легко можно доказать что в симметричных системах при действии симметричных нагрузок будут только симметричные неизвестные усилия. В симметричных системах при кососимметричной нагрузке останутся только кососимметричные неизвестные усилия.
5. 3. 2 Возможные упрощения при расчете статистически неопределимых систем по методу сил Использование симметрии системы Возможные упрощения при расчете также связаны с симметрией в системе. X 1 X 2 СНН=Л=2 X 1 Р Р Легко можно доказать что в симметричных системах при действии симметричных нагрузок будут только симметричные неизвестные усилия. В симметричных системах при кососимметричной нагрузке останутся только кососимметричные неизвестные усилия.
 Кососимметричное загружение X 4 X 3 X 4 q X 2 q X 1 X 2 Любую нагрузку можно разделить на симметричную и кососимметричную.
Кососимметричное загружение X 4 X 3 X 4 q X 2 q X 1 X 2 Любую нагрузку можно разделить на симметричную и кососимметричную.
 Этот способ расчета – называется способом разложения нагрузки. Рассмотрим пример расчета. Р q
Этот способ расчета – называется способом разложения нагрузки. Рассмотрим пример расчета. Р q
 2) P/2 P/2 q/2 q/2") Всю нагрузку разложим на симметричное загружение и кососиметричное. 1) 2) P/2 P/2 q/2 q/2
Всю нагрузку разложим на симметричное загружение и кососиметричное. 1) 2) P/2 P/2 q/2 q/2
 Основная система для симметричной нагрузки Основная система для косоимметричной нагрузки X 3 X 4 X 2 X 1 Итоговая эпюра моментов получится путем суммирования эпюр для каждого состояния в отдельности. Эп М = Эп М 1 + Эп М 2
Основная система для симметричной нагрузки Основная система для косоимметричной нагрузки X 3 X 4 X 2 X 1 Итоговая эпюра моментов получится путем суммирования эпюр для каждого состояния в отдельности. Эп М = Эп М 1 + Эп М 2
 К возможным упрощениям относится способ рациональной расстановки шарниров и способ группировки неизвестных. Рассмотрим способ группировки неизвестных X 1 X 2 Основная система
К возможным упрощениям относится способ рациональной расстановки шарниров и способ группировки неизвестных. Рассмотрим способ группировки неизвестных X 1 X 2 Основная система
 X 1 Х 1=1
X 1 Х 1=1
 Х 2=1 Необходимо стремиться к тому, чтобы единичные эпюры моментов были взаимно ортогональными ( при перемножении давали нулевые значения). В данном случае эпюры не получаются не взамно ортогональными. δ 12 = δ 21= Эп М 1 * Эп М 2 ≠ 0
Х 2=1 Необходимо стремиться к тому, чтобы единичные эпюры моментов были взаимно ортогональными ( при перемножении давали нулевые значения). В данном случае эпюры не получаются не взамно ортогональными. δ 12 = δ 21= Эп М 1 * Эп М 2 ≠ 0
 При группировке неизвестных используется понятие: обобщенные неизвестные усилия. Неизвестные усилия могут приниматься как сумма или разность отдельных неизвестных сил. X 1 X 2
При группировке неизвестных используется понятие: обобщенные неизвестные усилия. Неизвестные усилия могут приниматься как сумма или разность отдельных неизвестных сил. X 1 X 2
 X 1 X 2
X 1 X 2
 X 1 X 2 δ 12 = δ 21= Эп М 1 * Эп М 2 = 0
X 1 X 2 δ 12 = δ 21= Эп М 1 * Эп М 2 = 0
. X 1 X 2 Xi") Способ группировки неизвестных применяется при расчете многоэтажных рам (зданий). X 1 X 2 Xi Xn ССН=Л=4
Способ группировки неизвестных применяется при расчете многоэтажных рам (зданий). X 1 X 2 Xi Xn ССН=Л=4
 X 1 X 2 δij≠ 0
X 1 X 2 δij≠ 0
 При группировке неизвестных получим Основная система X 1 X 2 Xi Xn В данном случае при перемножении единичных эпюр получены значение δij=0
При группировке неизвестных получим Основная система X 1 X 2 Xi Xn В данном случае при перемножении единичных эпюр получены значение δij=0
 6 Применение метода сил к расчету статистически неопределимых ферм и арок X 1 L L Л=ССН=1 – внешне статистически неопределима Основная система выбирается путем отбрасывания лишних связей.
6 Применение метода сил к расчету статистически неопределимых ферм и арок X 1 L L Л=ССН=1 – внешне статистически неопределима Основная система выбирается путем отбрасывания лишних связей.
 Рассмотрим следующую статически неопределимую ферму: Л=СНН=2 – внутренне статистически неопределимая система. Основная система X 2 X 1
Рассмотрим следующую статически неопределимую ферму: Л=СНН=2 – внутренне статистически неопределимая система. Основная система X 2 X 1
 Канонические уравнения метода сил составляются обычным способом. Nj – продольное усилие в стержне j – номер стержня
Канонические уравнения метода сил составляются обычным способом. Nj – продольное усилие в стержне j – номер стержня
 от Х 1 = 1 2) от Х 2") Рассматриваем следующие состояния системы: 1) от Х 1 = 1 2) от Х 2 = 1 3) от внешней нагрузки Р в основной системе. Nij, Nkj – усилия в j- стержне от параметров Хi = 1 и Хk = 1. (1) EAj – осевая жесткость j-го стержня, lj – длина j-го стержня. (2) Из решение системы канонических уравнений определяются неизвестные усилия, затем во всех стержнях определяется итоговые усилия: Nj = Npj + Nij ∙xi + … Nnj ∙xn (3)
Рассматриваем следующие состояния системы: 1) от Х 1 = 1 2) от Х 2 = 1 3) от внешней нагрузки Р в основной системе. Nij, Nkj – усилия в j- стержне от параметров Хi = 1 и Хk = 1. (1) EAj – осевая жесткость j-го стержня, lj – длина j-го стержня. (2) Из решение системы канонических уравнений определяются неизвестные усилия, затем во всех стержнях определяется итоговые усилия: Nj = Npj + Nij ∙xi + … Nnj ∙xn (3)
 Расчет") После расчета выполняется проверка: перемещения по направлению отброшенных связей должны равняться нулю. (4) Расчет арок Двухшарнирная арка (1 раз статически неопределима )
После расчета выполняется проверка: перемещения по направлению отброшенных связей должны равняться нулю. (4) Расчет арок Двухшарнирная арка (1 раз статически неопределима )
 Расчет ведется классическим методом. При расчете") Бесшарнирная арка ( 3 раза статически неопределима ) Расчет ведется классическим методом. При расчете длина дуги арки делится на 10 - 12 участков: ds – длина участка Перемещение по направлению i – ой связи от Хк = 1 : (5) EA – осевая GA – сдвиговая EJ – изгибная жесткость Все интегралы вычисляются на основании численных методов.
Бесшарнирная арка ( 3 раза статически неопределима ) Расчет ведется классическим методом. При расчете длина дуги арки делится на 10 - 12 участков: ds – длина участка Перемещение по направлению i – ой связи от Хк = 1 : (5) EA – осевая GA – сдвиговая EJ – изгибная жесткость Все интегралы вычисляются на основании численных методов.
 7 Многопролетные неразрезные балки
7 Многопролетные неразрезные балки
 В неразрезных балках моменты в 1, 5÷ 2 раза меньше, чем в однопролетных балках. За счет этого уменьшаются размеры сечения балки, что ведет к снижению материалоёмкости конструкции. Методы расчета: - метод сил - метод перемещений
В неразрезных балках моменты в 1, 5÷ 2 раза меньше, чем в однопролетных балках. За счет этого уменьшаются размеры сечения балки, что ведет к снижению материалоёмкости конструкции. Методы расчета: - метод сил - метод перемещений
 Основная") Расчет многопролетных неразрезных балок с помощью уравнений трех моментов ( по методу сил) Основная система δij=0 – количество нулевых коэффициентов должно стремиться к максимуму Mi – неизвестные опорные моменты ( вместо Хi )
Расчет многопролетных неразрезных балок с помощью уравнений трех моментов ( по методу сил) Основная система δij=0 – количество нулевых коэффициентов должно стремиться к максимуму Mi – неизвестные опорные моменты ( вместо Хi )
 При таком выборе основной системы вся балка делится на отдельные однопролетные балки, которые рассчитываются независимо друг от друга. При этом каждый опорный момент действует на 2 смежных пролета. Таким образом, единичные эпюры моментов будут короткими и количество нулевых коэффициентов увеличивается (δij = 0), трудоемкость расчета снижается. Вырежем из балки 2 смежных пролета
При таком выборе основной системы вся балка делится на отдельные однопролетные балки, которые рассчитываются независимо друг от друга. При этом каждый опорный момент действует на 2 смежных пролета. Таким образом, единичные эпюры моментов будут короткими и количество нулевых коэффициентов увеличивается (δij = 0), трудоемкость расчета снижается. Вырежем из балки 2 смежных пролета
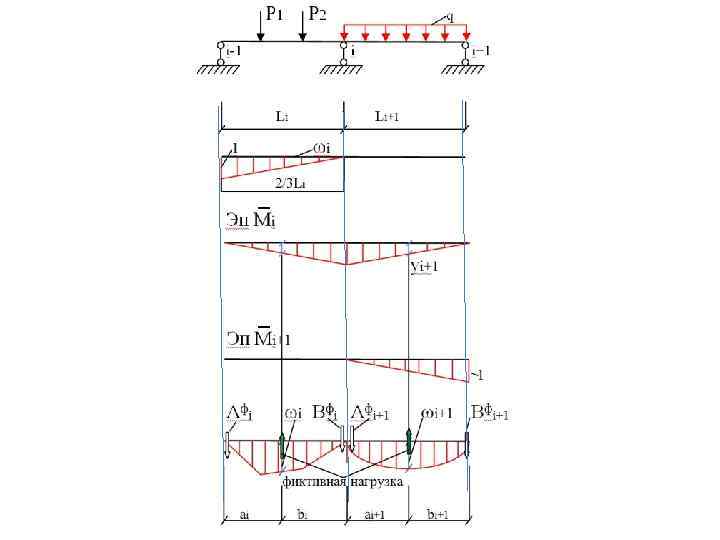
 Каноническое уравнение метода сил для i-ой опоры: EJ=const δi, i-1 * Mi-1 + δii. Mi + δi, i+1 * Mi+1 + ∆ip = 0 (1) Таких уравнений должно быть столько, сколько промежуточных опор. δi, i+1; ∆ip – неизвестные коэффициенты Подставляем в уравнение (1) Mi-1 Li + 2 Mi(Li+Li+1)+Mi+1*Li+1= -6(ωi yi+ωi+1*yi+1) (2)
Каноническое уравнение метода сил для i-ой опоры: EJ=const δi, i-1 * Mi-1 + δii. Mi + δi, i+1 * Mi+1 + ∆ip = 0 (1) Таких уравнений должно быть столько, сколько промежуточных опор. δi, i+1; ∆ip – неизвестные коэффициенты Подставляем в уравнение (1) Mi-1 Li + 2 Mi(Li+Li+1)+Mi+1*Li+1= -6(ωi yi+ωi+1*yi+1) (2)
 Если площади эпюры Мр в каждом пролете принять за фиктивную нагрузку – ωi, то от фиктивной нагрузки будут фиктивные реакции. ΣМB = -Афi * Li+ωi*Li=0 Представляем фиктивные реакции в уравнение (2) Mi-1 Li + 2 Mi(Li+Li+1)+Mi+1*Li+1= -6(Bфi+ Афi+1) (3) Сумма фиктивных реакций, примыкающих к i - ой опоре.
Если площади эпюры Мр в каждом пролете принять за фиктивную нагрузку – ωi, то от фиктивной нагрузки будут фиктивные реакции. ΣМB = -Афi * Li+ωi*Li=0 Представляем фиктивные реакции в уравнение (2) Mi-1 Li + 2 Mi(Li+Li+1)+Mi+1*Li+1= -6(Bфi+ Афi+1) (3) Сумма фиктивных реакций, примыкающих к i - ой опоре.
 8 Расчет статистически неопределимых систем по методу перемещений 8. 1 Понятие о степени кинематической неопределимости системы. Степень кинематической неопределимости системы – число независимых возможных ее перемещений. Рассмотрим возможные перемещения отдельных узлов на плоскости. 2 независимых перемещения по оси х и у. x, y, φ – 3 независимых перемещения n – число возможных перемещений
8 Расчет статистически неопределимых систем по методу перемещений 8. 1 Понятие о степени кинематической неопределимости системы. Степень кинематической неопределимости системы – число независимых возможных ее перемещений. Рассмотрим возможные перемещения отдельных узлов на плоскости. 2 независимых перемещения по оси х и у. x, y, φ – 3 независимых перемещения n – число возможных перемещений
 Для системы: n=ny+nл ny – количество жестких узлов в системе nл- количество возможных линейных смещений Z 2 Z 1 Z 2 Z 5 Z 1 Z 3 Z 4 Z 1 Во всех жестких узлах будут изгибные деформации. z 1, z 2 – линейные перемещения z 3 z 4 z 5 – угловые перемещения (в жестких узлах) n=2+3=5
Для системы: n=ny+nл ny – количество жестких узлов в системе nл- количество возможных линейных смещений Z 2 Z 1 Z 2 Z 5 Z 1 Z 3 Z 4 Z 1 Во всех жестких узлах будут изгибные деформации. z 1, z 2 – линейные перемещения z 3 z 4 z 5 – угловые перемещения (в жестких узлах) n=2+3=5
 где ny –") Определим аналитическим путем степень кинематической неопределимости, осуществляется по формуле: n=ny+nл (1) где ny – количество жестких узлов в рвме (ny=3) nл определяется исходя из рассмотрения условной шарнирно-стержневой системы. Ее получают путем введения шарниров, включая опорные: nл=W 0=число степени свободы условно шарнирно-стержневой системы W=2 У-С-Соп У=8 Соп=6 W 0=16 -8 -6=2 nл=W 0=2 n=3+2=5 – система 5 раз кинематически неопределима
Определим аналитическим путем степень кинематической неопределимости, осуществляется по формуле: n=ny+nл (1) где ny – количество жестких узлов в рвме (ny=3) nл определяется исходя из рассмотрения условной шарнирно-стержневой системы. Ее получают путем введения шарниров, включая опорные: nл=W 0=число степени свободы условно шарнирно-стержневой системы W=2 У-С-Соп У=8 Соп=6 W 0=16 -8 -6=2 nл=W 0=2 n=3+2=5 – система 5 раз кинематически неопределима
 8. 2 Сущность метода перемещений: EJ=const Эп M, Q, N-? n=ny+nл ny=1 nл=0 n=1+0=1 – один раз кинематически неопределима Основная система метода перемещений выбирается путем введения фиктивных связей, чтобы устранить возможные перемещения системы.
8. 2 Сущность метода перемещений: EJ=const Эп M, Q, N-? n=ny+nл ny=1 nл=0 n=1+0=1 – один раз кинематически неопределима Основная система метода перемещений выбирается путем введения фиктивных связей, чтобы устранить возможные перемещения системы.
 Возможные перемещения будут в жестком узле за счет изгиба стержней. Основная система для заданной рамы Z 1 - неизвестное угловое перемещение
Возможные перемещения будут в жестком узле за счет изгиба стержней. Основная система для заданной рамы Z 1 - неизвестное угловое перемещение
 Каноническое уравнение метода перемещения: Суммарная реакция во введенной фиктивной связи должна равняться нулю, от всех внешних воздействий и от возможных перемещений системы. r 11*z 1+R 1 p =0 (2) r 11 - реакция в первой фиктивной связи от единичного перемещения Z 1=1; R 1 p- реакция в первой фиктивной связи от нагрузки В основной системе расчет сводится к расчету отдельных однопролетных балок ( статистически неопределимых ) Фиктивные связи бывают двух видов: 1) жесткое защемление; 2) отдельные опорные стержни, препятствующие линейным перемещениям. В таблице представлены два вида балок:
Каноническое уравнение метода перемещения: Суммарная реакция во введенной фиктивной связи должна равняться нулю, от всех внешних воздействий и от возможных перемещений системы. r 11*z 1+R 1 p =0 (2) r 11 - реакция в первой фиктивной связи от единичного перемещения Z 1=1; R 1 p- реакция в первой фиктивной связи от нагрузки В основной системе расчет сводится к расчету отдельных однопролетных балок ( статистически неопределимых ) Фиктивные связи бывают двух видов: 1) жесткое защемление; 2) отдельные опорные стержни, препятствующие линейным перемещениям. В таблице представлены два вида балок:
 от угла поворота одного из жестких узлов; 2) от линейного единичного") Виды загружений: 1) от угла поворота одного из жестких узлов; 2) от линейного единичного перемещения одного из узлов; 3) от действующей нагрузки. В таблицах приводятся эпюры моментов от разных видов загружения и реакции опор. Все моменты и реакции приводятся взависимости от погонной жесткости элементов. Для определения реакций в фиктивных связях рассматриваем следующие состояния основной системы: единичное состояние от Z 1=1 и от внешней нагрузки 1) Z 1=1 1) сначала показываем схему деформирования стержней для определения растянутых волокон. Эп М 1
Виды загружений: 1) от угла поворота одного из жестких узлов; 2) от линейного единичного перемещения одного из узлов; 3) от действующей нагрузки. В таблицах приводятся эпюры моментов от разных видов загружения и реакции опор. Все моменты и реакции приводятся взависимости от погонной жесткости элементов. Для определения реакций в фиктивных связях рассматриваем следующие состояния основной системы: единичное состояние от Z 1=1 и от внешней нагрузки 1) Z 1=1 1) сначала показываем схему деформирования стержней для определения растянутых волокон. Эп М 1
 состояние от нагрузки P Mпр= M 0 -∆Mопор Mp Из этих эпюр определяются") 2) состояние от нагрузки P Mпр= M 0 -∆Mопор Mp Из этих эпюр определяются реакции r 11 и R 1 p из равновесия фиктивных связей: -в жестких связях по уравнению ∑М=0; -в линейных связях по уравнению Σх=0, или Σу=0.
2) состояние от нагрузки P Mпр= M 0 -∆Mопор Mp Из этих эпюр определяются реакции r 11 и R 1 p из равновесия фиктивных связей: -в жестких связях по уравнению ∑М=0; -в линейных связях по уравнению Σх=0, или Σу=0.
 Определяем реакцию r 11 : Для этого вырезаем первую фиктивную связь из эпюры М 1 4 i 1 3 i 1 r 11=4 i 1+4 i 2+3 i 1 4 i 2 Знак реакции будет положительный, если совпадает с принятым направлением перемещения (по часовой стрелке).
Определяем реакцию r 11 : Для этого вырезаем первую фиктивную связь из эпюры М 1 4 i 1 3 i 1 r 11=4 i 1+4 i 2+3 i 1 4 i 2 Знак реакции будет положительный, если совпадает с принятым направлением перемещения (по часовой стрелке).
 Для определения R 1 p – рассматривается первая связь из Эп Mp. m 1 R 1 p Подставим в каноническое уравнение Строим итоговую эпюру моментов. Мит= Эп М 1* Z 1+ Эп Mp. Выполняется проверка: 1) Статистическая 2) Кинематическая Эпюра Q строится по формуле Журавского; эпюра N строится исходя из эпюры Q.
Для определения R 1 p – рассматривается первая связь из Эп Mp. m 1 R 1 p Подставим в каноническое уравнение Строим итоговую эпюру моментов. Мит= Эп М 1* Z 1+ Эп Mp. Выполняется проверка: 1) Статистическая 2) Кинематическая Эпюра Q строится по формуле Журавского; эпюра N строится исходя из эпюры Q.
 Смешанные методы В") 8. 3 Смещенные и комбинированные методы расчета статистически неопределимых систем. а) Смешанные методы В этом методе одна часть лишних связей отбрасывается, а другая часть вводится виде фиктивных связей. Неизвестные усилия получаются в виде сил и в виде перемещений. (Гвоздев 1927 год) Рассмотрим систему: Ярус Метод расчета Нижний ярус Верхний ярус Итого Степень статистической неопределимости (метод сил) 9 Степень кинематической неопределимости (метод перемещения) 2 2 12 11 14
8. 3 Смещенные и комбинированные методы расчета статистически неопределимых систем. а) Смешанные методы В этом методе одна часть лишних связей отбрасывается, а другая часть вводится виде фиктивных связей. Неизвестные усилия получаются в виде сил и в виде перемещений. (Гвоздев 1927 год) Рассмотрим систему: Ярус Метод расчета Нижний ярус Верхний ярус Итого Степень статистической неопределимости (метод сил) 9 Степень кинематической неопределимости (метод перемещения) 2 2 12 11 14
 Исходя из данной таблицы, расчет нижнего яруса принимаем согласно метода перемещений и верхнего яруса - по методу сил. Z 1, Z 2 - неизвестные перемещения х3, х4 - неизвестные усилия Z 1 Z 2
Исходя из данной таблицы, расчет нижнего яруса принимаем согласно метода перемещений и верхнего яруса - по методу сил. Z 1, Z 2 - неизвестные перемещения х3, х4 - неизвестные усилия Z 1 Z 2
 В этих уравнениях два уравнения выражают равенство нулю реакции в фиктивных связях; два других уравнения – равенство нулю перемещений по направлению отброшенных связей. r 11 Z 1+r 12 Z 2+r 13 X 3+r 14 X 4+ R 1 p=0 r 21 Z 2+r 22 Z 2+r 23 X 3+r 24 X 4+R 2 p=0 (1) δ 31 Z 1+δ 32 Z 2+δ 33 X 3+δ 34 X 4+∆3 p=0 δ 41 Z 1+δ 42 Z 2+δ 43 X 3+δ 44 X 4+∆4 p=0 Коэффициенты: 1) реакции в фиктивных связях от единичных перемещений этих связей: r 11, r 12, r 21, r 22; 2) реакции в фиктивных связей от единичных усилий: r 13, r 14, r 23, r 24; 3) перемещения от единичных перемещений от Z 1=1 от Z 2=1: δ 31, δ 32, δ 41, δ 42; 4) перемещение от единичных усилий от x 3=1, x 4=1: δ 34, δ 43, δ 44, δ 33. 2 -3 группа это коэффициенты смешанного типа.
В этих уравнениях два уравнения выражают равенство нулю реакции в фиктивных связях; два других уравнения – равенство нулю перемещений по направлению отброшенных связей. r 11 Z 1+r 12 Z 2+r 13 X 3+r 14 X 4+ R 1 p=0 r 21 Z 2+r 22 Z 2+r 23 X 3+r 24 X 4+R 2 p=0 (1) δ 31 Z 1+δ 32 Z 2+δ 33 X 3+δ 34 X 4+∆3 p=0 δ 41 Z 1+δ 42 Z 2+δ 43 X 3+δ 44 X 4+∆4 p=0 Коэффициенты: 1) реакции в фиктивных связях от единичных перемещений этих связей: r 11, r 12, r 21, r 22; 2) реакции в фиктивных связей от единичных усилий: r 13, r 14, r 23, r 24; 3) перемещения от единичных перемещений от Z 1=1 от Z 2=1: δ 31, δ 32, δ 41, δ 42; 4) перемещение от единичных усилий от x 3=1, x 4=1: δ 34, δ 43, δ 44, δ 33. 2 -3 группа это коэффициенты смешанного типа.
 В конце расчета строятся итоговые эпюры M, Q, N. Эпюра М: Эп М= Эп Мр+Эп М 1*Z 1+ Эп М 2*Z 2+ Эп М 3*x 3+ Эп М 4*x 4 (2) б) Комбинированные методы расчета Используются в симметричных системах и расчет производится, например - на симметричные нагрузки по методу перемещений, а на кососимметричные по методу сил или наоборот.
В конце расчета строятся итоговые эпюры M, Q, N. Эпюра М: Эп М= Эп Мр+Эп М 1*Z 1+ Эп М 2*Z 2+ Эп М 3*x 3+ Эп М 4*x 4 (2) б) Комбинированные методы расчета Используются в симметричных системах и расчет производится, например - на симметричные нагрузки по методу перемещений, а на кососимметричные по методу сил или наоборот.
 9. Особенности расчета многопролетных и многоярусных рам Используются приближенные методы расчета. Расчет выполняется раздельно на вертикальные и горизонтальные нагрузки. а) Расчет на вертикальную нагрузку Допущения при расчете: 1) горизонтальные перемещения равны нулю; 2) нагрузка, приложенная к перекрытию одного яруса, практически не передается на перекрытия других ярусов.
9. Особенности расчета многопролетных и многоярусных рам Используются приближенные методы расчета. Расчет выполняется раздельно на вертикальные и горизонтальные нагрузки. а) Расчет на вертикальную нагрузку Допущения при расчете: 1) горизонтальные перемещения равны нулю; 2) нагрузка, приложенная к перекрытию одного яруса, практически не передается на перекрытия других ярусов.
 В этом случае расчет сводится к расчету отдельных одноярусных рам; верхних, средних, нижних. Каждая вышележащая рама упруго защемлена в нижнем ярусе. Верхняя рама Средняя рама Расчет таких отдельных рам производится с помощью справочников проектировщика (Уманский). В таблицах заложен метод перемещений, при этом следует учитывать, что нагрузка в каждом пролете передается на смежные пролеты. Нижняя рама
В этом случае расчет сводится к расчету отдельных одноярусных рам; верхних, средних, нижних. Каждая вышележащая рама упруго защемлена в нижнем ярусе. Верхняя рама Средняя рама Расчет таких отдельных рам производится с помощью справочников проектировщика (Уманский). В таблицах заложен метод перемещений, при этом следует учитывать, что нагрузка в каждом пролете передается на смежные пролеты. Нижняя рама
 Нижний ярус 9 10 P 1 5 1 6 7 2 Эпюра от Р 1 будет распространяться только на деформированные участки (два смежных пролета).
Нижний ярус 9 10 P 1 5 1 6 7 2 Эпюра от Р 1 будет распространяться только на деформированные участки (два смежных пролета).
 Расчет рам на горизонтальную нагрузку") б) Расчет рам на горизонтальную нагрузку
б) Расчет рам на горизонтальную нагрузку