!оптический21.12.2011 контрольУКР!.ppt
- Количество слайдов: 94


 - простий і загальнодоступний вид неруйнівного контролю,")
Візуально-оптичний контроль. Візуальний контроль (огляд неозброєним оком) - простий і загальнодоступний вид неруйнівного контролю, що забезпечує високу продуктивність контролю оптичними методами. Око людини є основним контрольним приладом в дефектоскопічних виробничих процесах. Оком контролюють початкові матеріали, напівфабрикати і готову продукцію, виявляють відхилення форми деталей і виробів, вади матеріалу і обробки поверхні, а також інші дефекти, що виникають в процесі виробництва і при експлуатації механізмів і машин: залишкову деформацію, поверхневу пористість, крупні тріщини, підрізи, ризики, надіри, ерозійні і корозійні враження, сліди наклепання і ін. Візуально визначають стан захисних покриттів, контролюють якість виробів по їх кольору і здійснюють інші контрольні функції. Проте можливості ока обмежені, наприклад, при огляді видалених об'єктів, предметів, що знаходяться в умовах малої освітленості, а також об'єктів, що швидко переміщаються. При огляді предметів, що знаходяться у спокої на відстані якнайкращого зору при нормальній освітленості, людина зазнає труднощі із-за обмежених роздільної здатності і контрастної чутливості зору.

Оптичні прилади дозволяють набагато розширити межі природних можливостей ока. Унаслідок заломлення променів в оптичній системі приладів збільшується кутовий розмір даного об'єкту. Гострота зору і роздільна здатність ока збільшується приблизно в стільки раз, в скільки збільшує оптичний прилад. Це дозволяє також контролювати дрібні деталі видимих неозброєним оком об'єктів. При цьому полегшується аналіз їх природи і вигляду. Візуально-оптичним називають неруйнівний контроль якості із застосуванням оптичних засобів, що дозволяють істотно розширити межі природних можливостей органів зору людини. Він є технічним продовженням візуального контролю, дає можливість виявляти дрібніші дефекти і проводити вимірювання з високою роздільною здатністю (1 -5 мкм). Він призначений для виявлення різних поверхневих дефектів матеріалу, деталей, прихованих дефектів агрегатів, контролю закритих конструкцій, труднодоступних місць механізмів і машин (за наявності каналів для доступу приладів до контрольованих об'єктів). Контроль проводиться шляхом спостереження деталей і виробів у видимому світлі. При контролі використовуються оптичні прилади, які створюють повне зображення зони, що перевіряється, її видиму картину.

При організації і проведенні візуально-оптичного контролю треба враховувати основні особливості, характерні для візуального контролю, оскільки в обох випадках вирішальну роль грає оператор. Відзначимо особливості зору людини, який грає вирішальну роль в ухваленні рішення про стан об'єкту контролю, і кінець кінцем на ефективність правильної діагностики. Найбільша чутливість і найменша стомлюваність людського ока відповідає довжині хвилі 0, 56 мкм (жовто-зелений колір) і яскравості 10 - 100 кд/м 2, тому цій спектральній складовій повинна віддаватися перевага при роботі з випромінюваннями змішаного складу. Чутливість зору від яскравості світла з фіксованим спектральним складом змінюється приблизно по логарифмічному закону. Це ускладнює правильну кількісну оцінку яскравості світла оператором. Разом з тим чутливість ока до відносного перепаду яскравості залишається приблизно постійною в діапазоні її змін до 106 разів. Тому оператор може правильно оцінювати яскравості джерел однакового порядку. Візуально-оптичний контроль проводиться відповідно до затверджених методик для конкретних напівфабрикатів і виробів найчастіше в наступному порядку.

Контрольований об'єкт заздалегідь готують: очищають від забруднень, консервуючих шарів, оксидів і так далі, для чого використовують протирання, промивку, піскоструминну або хімічну обробку. Після цього поміщають контрольований об'єкт і апаратуру в необхідне положення, встановлюють режими контролю, що рекомендуються, і освітлення, а потім проводять спостереження або вимірювання контрольованих чинників. Візуально-оптичний контроль якості серійної і масової продукції проводять шляхом їх порівняння з еталонами, вимірювальними засобами або із затвердженим контрольним зразком. Потім проводиться обробка результатів вимірювань. Взаємне положення контрольованого об'єкту і апаратури а також режими освітлення (яскравість, спектральний склад, поляризація і ін. ) вибираються так, щоб забезпечити максимально можливий контраст дефекту Кд щодо фону. Контроль об'єктів з непрозорих матеріалів, вимірювання їх лінійних розмірів і характеристик поверхні здійснюється у відбитому або розсіяному світлі. Об'єкти з прозорих і напівпрозорих матеріалів контролюють зазвичай в світлі, що проходить, або іншому освітленні, що дає велику контрастність. Оскільки достовірність виявлення дефектів залежить від освітленості, вона повинна бути встановлена не менше певної величини відповідно до існуючих норм.

Загальним правилом є необхідність збільшення освітленості, якщо треба виявляти дефекти меншої величини, для проходження дефектів з малим контрастом (Кд<0, 2), коли освітленість підвищують в 1, 5 - 2 рази, і при контролі на темному фоні (її збільшують на 20 - 35%). Важливою умовою є напрям падіння світла, вплив якого вельми істотно. Рекомендується вибирати кут падіння світла α=30 -600, оскільки при малих кутах (напрям світла по нормалі NN') невеликий контраст дефекту, а при великих кутах (напрям світла близький до дотичної TT') з'являється велика кількість помилкових затемнень, викликаних виступами і западинами від шорсткості зовнішньої поверхні. Найменший розмір дефектів lmin, що виявляються, повинен перевищувати величину мікро нерівностей рельєфу поверхні не менше, чим в 3 рази. Для дослідження несамосвітних об'єктів і при недостатності загального освітлення застосовуються направлені освітлювачі, що забезпечують контроль в прохідному (у разі прозорих і напівпрозорих об'єктів) або в відбитім світлі, в світлому або темному полі, від чого залежать роздільна здатність, контраст і якість зображення об'єкту.
 безпосередньо")
Спостереження в світлому полі відбувається, якщо світло від контрольованого об'єкту (або крізь нього) безпосередньо потрапляє в об'єктив, створюючи зображення, причому поглинаючі або такі, що погано відображають, елементи об'єкту виглядатимуть темними на світлому фоні (позитивне зображення). При роботі в темному полі світло не потрапляє безпосередньо від освітлювача і контрольованого об'єкту в об'єктив (косе освітлення), якщо об'єкт має високу якість поверхонь і не має інших дефектів, а зображення формується тільки окремими елементами або дефектами, на яких відбувається дифузне розсіювання світла. Сильно розсіючі світло ділянки контрольованого об'єкту при цьому виглядають світлішими на темному фоні (негативне зображення). Для контролю в труднодоступних місцях використовують дзеркала, що закріплені на ручках або штангах і змінюють напрям ходу променів. Простота контролю, нескладне устаткування, порівняно мала трудомісткість - основні переваги цього методу контролю. Проте у візуально-оптичного контролю недостатньо висока достовірність і чутливість.

Для усунення цього недоліку зазвичай проводять багатоступінчатий контроль: оглядають поверхню виробу без оптичних засобів, виявляючи крупні дефекти і підозрілі місця, вивчають ці місця через лупу (однолінзовий мікроскоп), а потім досліджують окремі ділянки контрольованого виробу за допомогою багатолінзового мікроскопа, послідовно підвищуючи кратність його збільшення. При правильному виборі умов візуально-оптичного контролю розміри елементів об'єкту або мінімальних дефектів lmin(у мм), що виявляються, зменшуються відповідно до оптичного збільшення пристрою Кув: Лупи призначені для оптичного контролю близько розташованих елементів зображення при невеликому збільшенні (2 -20 х) і зазвичай при ручному контролі.

Зручність роботи з ними визначається тим, що їх легко переміщати по контрольованому об'єкту, а зона огляду лупи порівняно велика. Оскільки для луп і мікроскопів з великим збільшенням глибина різкості зменшується, проведення контролю з їх допомогою ускладнюється і вимагає більшого часу для фокусування зображення (пошуку відстані якнайкращого бачення). Лупи мають різне конструктивне оформлення відповідно до варіантів їх застосування: оглядові - для контролю одночасно двома очима; налобні у вигляді збільшувальних окулярів; доладні, зокрема - кишенькові, вартові, телескопічні. Оптична частина лупи може складатися з однієї лінзи або декількох, які скріпляють між собою, що дає можливість скоректувати частину абберацій і отримати зображення хорошої якості. Лупи з малим збільшенням (2 -7 х) використовують для пошуку дефектів і дефектних зон, а з великим (5 -20 х) - для їх аналізу і виявлення дефектів мінімально можливих розмірів. Щоб максимально використовувати можливості лупи проведенні візуально-оптичного контролю, її (окрім великих бінокулярних луп) треба тримати якомога ближче до ока, оскільки в цьому випадку сприймається найбільша кількість променів, що йдуть від контрольованого об'єкту, і знижується вплив віддзеркалень (відблисків) від сторонніх предметів і лінзи.

Лупа розміщується, як правило, паралельно контрольованій поверхні, що підвищує продуктивність і достовірність візуально-оптичного контролю. Мікроскоп є оптичним багатолінзовим пристроєм для спостереження елементів, не видимих неозброєним оком, який має регулювання оптичних властивостей. Він дає можливість отримати якісне збільшене зображення, причому збільшення може досягати 2000 разів, а лінійне вирішування - 0, 5 мкм. Для цілей неруйнівного контролю якості досить широко застосовують мікроскопи серійні (універсальні, вимірники, металографічні і ін. ) і спеціалізовані для вирішення конкретних контрольно-вимірювальних завдань. Мікроскопи дозволяють проводити візуально-оптичний контроль при різних режимах освітлення і збільшення, а також по різних методиках.

Прилади для контролю топографії поверхонь і об'ємних поверхневих дефектів Можна розбити на 3 класи: 1. Прилади контролю шорсткості поверхні. В цьому випадку виконується інтегральна оцінка поверхневих дефектів. 2. Прилади для контролю і вимірювання поверхневих дефектів і мікро геометрії. При цьому контролюються окремі дефекти виробу і вимірюється глибина дефекту. 3. Прилади для контролю площинності (в основному полірованих поверхонь). Такими приладами виявляються дефекти типу однорідного вигину, завалів, складного вигину (викривлення). .

Прилади для контролю шорсткості поверхні Двопроменевий інтерферометр
, принцип дії яких заснований на порівнянні")
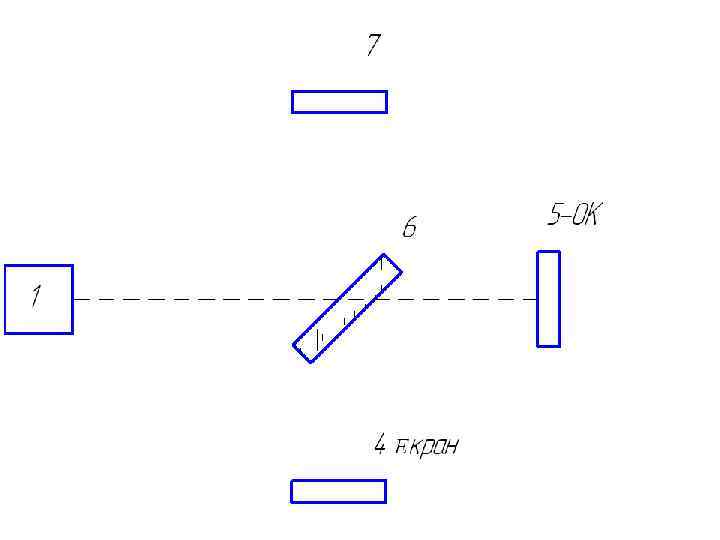
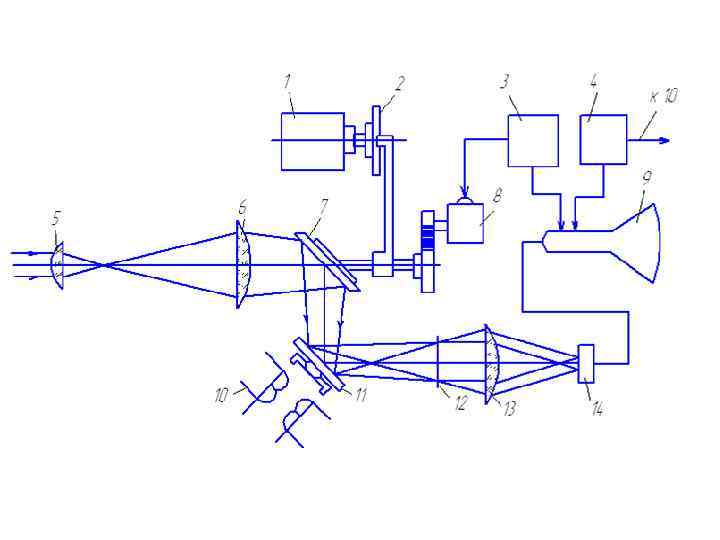
Як правило, використовують схеми інтерферометрів (в основному Майкельсона), принцип дії яких заснований на порівнянні світлових хвиль, що отримуються при віддзеркаленні когерентних пучків світла від контрольованої і еталонної поверхні. Представлена схема двопроменевого мікроінтерферометра Лінніка. У її основу покладений принцип дії інтерферометра Майкельсона. Світло від джерела 1 проходить через конденсор 2 і діафрагму З і дзеркалом 4 ділиться на два когерентні пучки, які фокусуються об'єктивами 5 і 5' на еталонне дзеркало 6 і контрольовану поверхню 7. Після віддзеркалення від еталону і виробу пучок проходить через ті ж елементи схеми і фокусується лінзой 8 в площині діафрагми 9, в якій за допомогою окуляра 10 спостерігають інтерференційну картину взаємодії еталонного і робочого пучків світла. При цьому спостерігають смуги інтерференції, викривлені відповідно до мікронеоднорідностей поверхні виробу. Кривизну смуг вимірюють, наприклад, за допомогою окулярного мікрометра.

Багатопроменевий мікроінтерферометр • Світло від джерела 1 (ртутна лампа низького тиску, що дає монохроматичне випромінювання, яке виділяється фільтром 10) через діафрагму 2 проходить конденсор 3 і паралельним пучком падає на напівпрозоре дзеркало 4. Після віддзеркалення пучок проходить пластину 5, що накладається на об'єкт 6 під малим кутом v. Її нижня сторона покрита шаром речовини з коефіцієнтом віддзеркалення, близьким до коефіцієнта віддзеркалення контрольованої поверхні. Між пластиною 5 і об'єктом 6 виникає інтерференція багато разів відбитих променів. Картину інтерференції, локалізовану на поверхні пластинки, розглядають в

Інтерференційний мікроскоп порівняння • Прилад дозволяє одночасно спостерігати дві інтерференційні картини, одна з яких формується виробом, а друга -еталоном шорсткості (звичайно це виріб того ж типу, що і контрольований) Світло від джерел 1 падає на зразок 2 і еталон 21 За допомогою призм 4, дзеркал 3, об'єктивів 5 і призм 6 і 7 формуються дві інтерференційні картини у фокальній площині 9 окуляра 8. Про якість зразка судять по ступеню відмінності цих картин.

Тіньовий метод · Тіньовим методом можна виявити дефекти поверхні розміром менше 1/100 довжини хвилі світла. Точкове джерело світла розташовують поблизу центру кривизни с дзеркала. Поряд з ним розташовують непрозорий екран. При спостереженні поверхні дзеркала 2 залежно від положення екрану можна побачити картини I-IV. Якщо ніж 1 точно розташувати в площині джерела, то його переміщення в напрямі, перпендикулярному до осі дзеркала, викличе плавне зменшення яскравості зображення. При цьому дефекти поверхні з'являються у вигляді плями, половина якої темна, а половина світла.

Метод світлового перетину · На поверхню виробу проектується зображення вузької щілини, що світиться, і потім оцінюється у відбитих променях, зазвичай під кутом 45° до нормалі. За наявності нерівностей на поверхні виробу у полі зору приладу спостерігається деформація зображення щілини, пропорційна її висоті h.

Мікроскоп Лінника • 1 -джерело світла • 2 -захисне скло • 3 -конденсор • 4 -щілина • 5 -фільтр • 6, 7 -лінзи • 8 -об‘єкт контролю • 9 -мікрооб‘єктиви • 10 -окуляр • 11 вимірювальний ніж (у приладах тіньового перетину) Джерело за допомогою конденсора освітлює щілину (О, 1 х 1 мм). Лінзи і мікрооб'єктив проектують щілину на виріб. Зображення щілини спостерігається в мікроскоп, що складається з мікрооб'єктиву, лінзи і окуляра з вимірювальним пристроєм (окулярний гвинтовий мікрометр).

Рефлексометричний метод Цей метод заснований на вимірюванні інтенсивності світлового потоку, відбитого від досліджуваного виробу. Кут падіння світла зазвичай вибирають рівними 86° для шорсткості 0, 4 -32 мкм, при цьому досягається максимальне значення дзеркальної складової відбитого потоку. Джерело світла 1 за допомогою конденсора 2, освітлює діафрагму 3 і знаходиться у фокусі об'єктиву 4, з якого виходить паралельний пучок світла, падаючий на виріб 9. Вимірювальна гілка складається з об'єктиву 5, діафрагми 6, конденсорної лінзи 7 і фотоелемента 8. Вимірювання полягають у визначенні максимальних значень при послідовній установці зразка і виробу і обчисленні їх відношення, яке і служить мірою якості поверхні. Точність вимірювань не перевищує ± 15%, проте метод має такі переваги, як простота, об'єктивність і швидкість вимірювання.

Профілографічний метод Цей метод заснований на реєстрації переміщень спеціальної голки, що знаходиться у контакті з досліджуваною поверхнею. Для вимірювання переміщення голки використовують принцип оптичного важеля. Зсуви вимірювального щупа викликають нахили дзеркала, які фіксуються за допомогою оптичної системи з великим збільшенням. При цьому масштаб запису може бути більше 100 000. Ці прилади використовують для контролю поверхні з параметрами шорсткості Rz =О, 4 -20 мкм. Похибка складає близько 10%. Радіус голки 2 і 10 мкм.

Прилади для контролю і вимірювання поверхневих дефектів і мікрогеометрії • Схема автоколімації

Джерело 1 за допомогою конденсора 2 і фільтру 3 освітлює сітку 4 (звичайне тонке прозоре перехрестя на темному фоні), яка проектується напівпрозорим дзеркалом 5, лінзою 6 і мікрооб‘єктивом 7 на об'єкт 8. Зображення поверхні деталі, на яку спроектовано перехрестя, спостерігається системою, що складається з сітки з шкалою 9 і окуляра 10. Шкала 9 служить для вимірювання розмірів дефекту в горизонтальній площині. Метод автоколімації дозволяє майже удвічі збільшити точність вимірювання, причому точність зростає із зменшенням шорсткості поверхні. Критерієм фокусування є різкість зображення перехрестя, що світиться, спостережуваного одночасно з поверхнею об'єкту. З огляду на те, що хід променів за тубусною лінзою паралельний, при фокусуванні можна переміщати тільки мікрооб'єктив. Величину цього переміщення вимірюють, наприклад, індикатором годинникового типу з похибкою ± 0, 001 мм.

Растрова схема автоколімації

Це спосіб вимірювання глибини нерівностей. Растри 2 і 3 проектуються напівпрозорим дзеркалом 4, тубусною лінзою 5 і об'єктивом 6 на контрольовану поверхню 7. Растри розташовані симетрично щодо фокальної площини F, крок растрів вибирають з урахуванням роздільної здатності мікрооб'єктиву 6. При точному фокусуванні автоколімаційні зображення растрів симетрично розташовуються щодо растру-аналізатора 8, причому їх штрихи зміщені на 1/2 кроку відносно растру-аналізатора 8. Тому у момент точного фокусування в площині растру 8 встановлюється фотометрична рівновага. При дефокусуванні вона порушується і реєструється візуально або фотоприймачем 9 -12, як показано на мал. Точність фокусування може досягати 0, 01 мкм при відносній простоті схеми.

Бісекторна схема
,")
Джерело 1 через конденсор 2 освітлює сітку 3 (наприклад, прозорий штрих на темному фоні), яка дзеркалом 4, лінзою 5 і об'єктивом 7 фокусується на об'єкт 8. Автоколімаційне віддзеркалення маски в площині сітки 9 спостерігається в окулярі 10 і у разі неточного фокусування роздвоюється. Це дозволяє як критерій фокусування використовувати бісекторне поєднання штрихів. Точність методу підвищується при збільшенні базису Ь.

Прилади контролю площинноcті виробів 1 - лазер; 2 - мікрооб'єктив; 3 - розсіювач; 4 - дзеркало; 5 - коліматор; 6 призма; 7 - контролюєма пластинка; 8 - дзеркало; 9 - телекамера; 10 – телевізор.

Принцип роботи приладу полягає в інтерференційному порівнянні досліджуваної і еталонної поверхонь. Еталонною поверхнею служить гіпотенуза грані призми. Контролюєма пластина розташовується на трьох сферичних опорах паралельно еталонній грані із зазором 0, 2 -0, 5 мм. Особливістю приладу є можливість контролю тонких прозорих пластин, а також шліфованих пластин за рахунок малих кутів падіння променів на об'єкт контролю. Точність вимірювання (ціна однієї інтерференційної смуги) - 1 мкм для випромінювання з довжиною хвилі = 0, 63 мкм. Розмір контрольованої пластини - до 100 X 100 мм 2. Контрастне зображення інтерферограм спостерігається на телевізійному моніторі, причому може бути застосована система його автоматичної обробки на МІКРОЕОМ. Пластина може розташовуватися вертикально для виключення впливу прогину.

Прилади контролю розмірів • • • Візуально-оптичні прилади Для контролю геометрії мікро- і макро- розмірів використовують проекційний метод порівняння або вимірювання, який полягає в отриманні збільшеного (зменшеного) зображення на екрані з подальшим його порівнянням із зображенням, прийнятим за еталон. Існують два основні способи проектування: у відбитих променях, та у променях, що проходять (епі- і діапроекції). Проектори застосовують для контролю інструментів, різьблення деталей, зубчатих коліс, каменів для приладів, об'єктів складної форми, а також виробів з конструкційних або крихких матеріалів. В даний час проектори володіють і вимірювальними функціями. Вимірювання виконують шляхом порівняння зображення контрольованого об'єкту з його кресленням або нарисом, виконаним в масштабі проекції і закріпленим на екрані або при переміщенні предметного столу мікрогвинтами до поєднання зображення контурів деталі з міткою на екрані. При цьому розмір деталі визначається як різниця відповідних свідчень мікрогвинтів. Сучасні проектори мають фотоелектричні і магнітні датчики переміщення, що дозволяє реєструвати переміщення столу цифрового індикатора з точністю 0, 005 мкм.
 подібного збільшення, 2)")
За типом оптичної схеми проектори можна класифікувати на наступні групи: 1) подібного збільшення, 2) зведеного зображення; 3) суміщеного і стереоскопічного зображення; 4) світлового перетину; 5) контактно-проекційні; 6) телевізійні Проектори подібного збільшення Використовують для контролю готових виробів і в процесі їх виготовлення (верстатні проектори).
 зображення застосовують при масовому контролі однотипних деталей. Змінюючи кут нахилу дзеркал,")
Проектори зведеного (подвійного) зображення застосовують при масовому контролі однотипних деталей. Змінюючи кут нахилу дзеркал, встановлюють номінальний розмір зображення. Про якість деталі судять по відхиленню її зображення від еталону .

Проектори суміщеного і стереоскопічного зображення застосовують для контролю деталей методом порівняння з еталонним виробом. Застосовуючи світлофільтри, помилки різного знаку можна характеризувати різними кольорами. За допомогою спеціальної освітлювальної системи можна отримати об'ємне зображення виробу і контролювати його по трьох координатах.

Проектор світлового перетину дозволяє отримати на екрані зображення профілю виробу складної форми, що освітлюється з боків плоскими пучками світла. На виріб зазвичай наносять шар черні (сажі і т. п. ), щоб підсилити контраст зображення. Точність вимірювання контура може досягати ± 0, 01 мм при збільшенні 10 -20. При контролі протяжних виробів застосовують циліндричні об'єктиви.

Контактно-проекційні проектори служать для контролю профілю виробів методом реєстрації на екрані зображення щупа, переміщення якого пов'язане із зміною розміру деталі.

Телевізійні проектори
 · Принцип дії ЛСБЛ")
Лазерні вимірювачі лінійних розмірів Лазерні системи променя, що біжить (ЛСПБ) · Принцип дії ЛСБЛ заснований на скануванні об'єкту тонким лазерним променем, переміщення якого в просторі по заданій траєкторії здійснюється за допомогою спеціального пристрою - сканатора. Найбільш поширені оптико-механічні сканатори, в яких управління променем в просторі здійснюється за допомогою рухомих дзеркал або лінз. Останнім часом знаходять застосування більш швидкодіючі електро- і акустооптичні сканатори.
. Прилад складається з сканатора, фотоприймача")
Прикладом ЛСПБ може бути лазерний діаметромер фірм SIRA, (Англія). Прилад складається з сканатора, фотоприймача і системи реєстрації. Промінь лазера 1 прямує на дзеркало 2, яке знаходиться у фокусі проекційного об'єктиву 3, і після об'єктиву розповсюджується паралельно його осі. При обертанні дзеркала промінь переміщується паралельно самому собі, перетинає контрольований виріб 5 і поступає після лінзи 3' на фотоприймач 4. У приладі використаний оптико-імпульсний спосіб вимірювання, тобто тривалість імпульсу на фотоприймачі пропорційна розміру виробу. Діапазони контрольованих діаметрів 0, 01 -0, 5 і 1 -70 мм, похибка 0, 1 %, частота сканування 50 Гц .
 променя")
ЛСПБ з подовжнім скануванням (фокусуванням) променя

Світло від лазера 1 за допомогою телескопа 3 і об'єктиву З 1 фокусується на об'єкт 5 в точку А. Після віддзеркалення від об'єкту світло проходить об'єктив З 1, світлодільник 6 і лінзою 3" фокусується на діафрагму 8 (т. А'), яка здійснює поступальні переміщення уздовж оптичної осі. Якщо т. А' співпадає з середнім положенням діафрагми, то в ланцюзі навантаження фотоприймача 4 протікає струм, інтенсивність якого міняється по синусоїдальному закону (зазвичай діафрагма здійснює гармонічні коливання). При зміні положення об'єкту максимум сигналу відповідатиме фазі коливання, відмінній від початкової, що фіксується відповідним електронним пристроєм. Подібні системи знаходять застосування для контролю розмірів деталей при їх обробці на токарних верстатах і тому подібне.

Лазерні вимірювальні інтерферометри · зазвичай будуються по двопроменевій системі Майкельсона, що включає лазер, світлоподільне дзеркало і два відбивачі, один з яких нерухомий, а інший жорстко пов'язаний з виробом. Похибка ЛВІ складає не більше довжини хвилі світла, що випромінюється лазером. Недолік ЛВІ - відносно висока чутливість до механічних дій, що зумовило їх застосування в основному в прецизійному приладобудуванні, верстатобудуванні і метрології. Застосування кутових відбивачів замість плоских дзеркал істотно зменшує чутливість ЛВІ до вібрацій. Підвищення перешкодостійкості ЛВІ можна добитися, використовуючи схему без рухомого дзеркала, роль якого в даному випадку виконує сам об'єкт контролю. Подібний пристрій містить лазер, випромінюючий синфазне когерентне випромінювання в двох протилежних напрямах. Один з променів прямує на об'єкт і після віддзеркалення поступає на фотоприймач.

Дифракційні способи вимірювання · В більшості випадків аналізують дифракційне зображення об'єкту у фокальній площині об'єктиву, що дозволяє отримати необхідний розмір дифракційного зображення і зменшити вплив положення вимірюваного об'єкту на результат вимірювання. Дифракційний розподіл інтенсивності, що отримується у фокальній площині ідеального об'єктиву, інваріантний до зсувів вимірюваного виробу, розташованого перед ним. Найбільшого діапазону вимірювання розмірів об'єкту при дифракційному способі, заснованому на аналізі кутового або лінійного розміру дифракційного розподілу, можна досягти, забезпечуючи «прив'язку» процесу вимірювання до одного і того ж дифракційного порядку. При цьому діапазон вимірювання може бути значним, зважаючи на монотонну залежність розміру певного максимуму дифракційного розподілу від розміру об'єкту.

• Представляє інтерес прилад для вимірювання діаметру тонких циліндричних виробів (проволок, волокон і т. д. ) • Пучок випромінювання когерентного джерела зазнає дифракцію на виробі і в площині сканера 4 утворюється дифракційне зображення виробу, відповідне дифракції Фраунгофера. Дифракційний розподіл інтенсивності перетвориться в електричний сигнал, що описує цей розподіл. Блок обробки електричного сигналу формує прямокутний імпульс, тривалість якого однозначно пов'язана з відстанню між вибраними мінімальними точками дифракційного розподілу.
 · засновані на принципі оптичного далекоміра з постійною базою. Подібні")
Лазерні триангуляційні вимірювачі (ЛТВ) · засновані на принципі оптичного далекоміра з постійною базою. Подібні системи працюють у відбитих від об'єкту променях ОКГ.

ЛТВ містить лазер 1, світлодільник 6, дзеркало, що обертається 2, об'єкт 5 і приймач 4. Обертаючи рухоме дзеркало, добиваються поєднання на поверхні об'єкту відблисків від прямого і похилого променів і визначають відстань D до об'єкту по формулі D = Ь ctg α де Ь - база ЛТВ; α - кут повороту дзеркала. Вони знаходять застосування в системах товщинометрії, пристроях контролю взаємного розташування об'єктів і тому подібне. Переваги ЛТВ - широкий діапазон контрольованих розмірів при значних відстанях до об'єкту в умовах одностороннього доступу до нього.

Фотоелектричні вимірювальні мікроскопи · Найбільш перспективними при вирішенні завдань безконтактного вимірювання зсувів в площині одній з поверхонь контрольованого об'єкту є фотоелектричні мікроскопи (ФЕМ), в яких проектоване оптичною системою зображення об'єкту перетвориться в електричний сигнал фотоприймачем, що володіє порівняно малою інерційністю і високою чутливістю. ФЕМ відрізняються порівняльною простотою, надійністю, забезпечують об'єктивність і автоматизацію вимірювань, зручні в експлуатаційному відношенні і дозволяють вимірювати зсуви, менші 0. 2 мкм.

Узагальнена оптична схема ФЕМ · Світло від джерела 1 через лінзи 2 і 4, діафрагму 3, куб призми 6 і об'єктив 5 потрапляє на площину об'єкту з нанесеною на ньому рискою (штрихом). Об'єктив 5 і окуляр 7 переносять зображення штриха в площину скануючої щілини 8: випромінювання, що пройшло через щілину, падає на фотоприймач 9. Іноді сканування щілиною 8 по нерухомому зображенню штриха замінюється скануванням зображення по нерухомій щілині. Залежно від принципу одержання інформації про зсув штриха фотоелектричні мікроскопи ділять на 1) часоімпульсні і 2) фотометричні.

Часоімпульсні ФЕМ У часоімпульсних ФЕМ амплітуда сканування А значно більша ширини щілини b і ширини зображення штриха а, які, як правило, близькі по величині один одному. На мал. представлений закон сканування щілини X = f(t) і графіки фотоструму U фотоприймача.

У тому випадку, коли зображення штриха знаходиться на осі сканування, вихідним сигналом є сукупність рівновіддалених один від одного імпульсів, причому тривалість непарних інтервалів між ними TH=t 2 k-i рівна тривалості парних Tп=t 2 k+i-t 2 k. Це положення штриха (Тп-Тн =0) є нульовим, а базою відліку вимірюваних зсувів служить вісь сканування. Інформативною величиною, що визначає зсув штриха, є різниця парних Тп і непарних інтервалів ТН. Якщо зображення штриха зміститься на деяку відстань xо від осі сканування, то при законі сканування X =f(t) різниця Тп ТН = 4 to , де to визначається зворотною по відношенню до f(t) функцією, тобто to = f -1 (xо ). Застосовують три способи вимірювання цієї різниці: 1. по середньому значенню сили струму або напруги послідовностей стандартних імпульсів, що мають тривалості, відповідно рівні Тп - ТН ; 2. по числу імпульсів заповнення, що поступають в лічильники, за час Тп - ТН ; 3. по відстані між зображеннями парних і непарних імпульсів на екрані осцилографа.

Часоімпульсний ФЕМ, за першим способом вимірювання зсуву

Імпульси з фотоприймача ФП, пройшовши через підсилювач У 1, поступають на вхід диференціюючої системи ДС і потім на діодний обмежувач ДО, після якого залишаються імпульси однієї полярності, що йдуть через інтервали часу Тн і Тп. Ці імпульси після підсилення в підсилювачі У 2 поступають на вхід амплітудного дискримінатора АД, що виробляє стандартні імпульси кожний раз, коли сигнал на вході перевищує пороговий. Стандартні імпульси з АД подаються на один з входів схеми збігу СЗ, на інший вхід якої поступає сигнал з генератора низької частоти ГНЧ. Напруга ГНЧ збуджує також і сканатор СК. Залежно від полярності напруги ГНЧ імпульси з АД поступають на той або інший вхід тригера Т, перекидаючи його в інший стійкий стан. Інтегруючий пристрій ІП вимірює середнє значення напруги на виході тригера, пропорційне різниці Тп-Тн.

Часоімпульсний ФЕМ, в якому зсув штриха визначається числом імпульсів за час Тп-Тн

• Цей ФЕМ ми розглянемо на прикладі компаратора для вимірювання або порівняння штрихових мір довжини. Світловий потік від джерела світла 5 розділяється призмою 6 на дві частини і далі по двох каналах через призми 7 і 7' і об'єктиви 8 і 8' потрапляє на поверхню шкал, що звіряються 9 і 10. Зображення штрихів шкал проектується в площині щілин 3 і 3', за якими розташовані фотоелементи 1 і 1'. Дзеркала 4 і 4‘, що здійснюють сканування, укріплені під кутом 90° один до одного на загальній осі і приводяться в коливальний рух з частотою 50 Гц електромагнітним пристроєм. Електричні сигнали з фотоелементів подаються в блок електронної обробки сигналів.

У кожному з каналів на виходах відповідного фотоелемента виникає імпульс при перетині щілини скануючим зображенням штриха. Ці імпульси подаються на входи відповідних передпідсилювачів 2 і 2‘, з виходів яких сигнал поступає на спеціальний блок відбору 3 імпульсів. Блок відбору пропускає на вхід тригера 5 імпульси з обох каналів, що виникають тільки прямому або тільки при зворотному напрямі скануючого руху. Пропущені блоком відбору імпульси відмикають і замикають тригер 5. При цьому тригер виробляє імпульси, тривалість яких пропорційна вимірюваній різниці довжин. Дискримінатор 6 відмикається на час, рівний тривалості імпульсу, що виробляється тригером 5, і пропускає імпульси заповнення від генератора 8 до лічильника 7. Блок 4 служить для визначення знаку переміщення.

Часоімпульсний ФЕМ з осцилографом в якості вихідного приладу Розгортка осцилографа синхронізується з сканатором так, що кожен подальший хід розгортки співпадає з рухом скануючого елементу то в один, то в інший бік.

Діаграма, що ілюструє залежність зсувів скануючого елементу і синхронізованої з ним напруги розгортки в часі. Тут умовно показаний закон сканування X = f (t) і синхронізований з ним закон Uр(t) розгортки променя екрану осцилографа. Легко бачити, що при Х 0=0 (зсув штриха відсутній) при прямому і зворотному русі сканера ми отримаємо на екрані осцилографа один імпульс. При Х 0≠ 0 цей імпульс роздвоюється і його обидві частини зміщуються симетрично щодо центру розгортки. Зсув зображення штриха Х 0 легко визначити, знаючи амплітуду сканування А, значення загальної довжини розгортки променя L і виміряну відстань l(x) між двома імпульсами на екрані осцилографа Якщо оптична система проектує штрих в площину скануючої діафрагми із збільшенням β , то й зсув самого штриха виражатиметься таким чином:

Осцилографічний ФЕМ для вимірювання зсуву штриха 1 - об'єкт з штрихом, зсуви якого вимірюються; 2 - оптична система із збільшенням β ; 3 плоскопаралельна пластина, що обертається з частотою ω у напрямі, вказаному стрілкою; 4 фотодіод, що освітлюється через обтюратор; 5 - жорстко пов'язаний з плоскопаралельною пластиною обтюратор; 6 нерухома щілина; 7 фотоелемент; 8 - осцилограф; 9 блок вертикального відхилення електронного променя осцилографа; 10 - блок горизонтальної розгортки.

При обертанні пластини зображення штриха сканують по щілині 6. В той час, коли зображення штриха проектується на щілину, на фотоелементі 7 виникає імпульс. Особливість системи сканування полягає в тому , що рух зображення штриха по щілині при обертанні пластини відбувається лише в одному напрямі, тому для отримання двох різних зображень імпульсу на екрані осцилографа передбачена зворотньопоступальна розгортка променя (блок 10). Синхронізація розгортки і сканування здійснюється обтюратором 5 і фотодіодом 4. Імпульс фотодіода U 4 використовується також як відмикач в блоці 9 для передачі сигналу фотоелемента 7 на вхід «Y» осцилографа.

Тривалість часу розгортки τр задається обтюратором і визначається максимальним кутом повороту пластини ωmах , в межах якого зсув зображення Х 0 може вважатися лінійною функцією α.

Фотометричні ФЕМ • можна розділити на ФЕМ: • 1. без сканування • 2. з скануванням • Як у тих, так і в інших приладах метод вимірювання зсуву штриха є амплітудним, проте у фотометричних ФЕМ без сканування положення штриха визначається величиною повного сигналу приймача променистої енергії, а у ФЕМ з скануванням - величиною однієї або декількох гармонічних складових часового сигналу.

Фотометричні ФЕМ без сканування • Проектоване в площину щілини 8 зображення штриха збільшується оптичною системою мікроскопа в β раз і орієнтуються так, щоб вісь штриха співпадала з віссю щілини. Вважатимемо «нульовим» таке положення штриха, при якому вісь штриха співпадає з віссю щілини. Зсув штриха від нульового положення позначимо х0 , тоді зсув його зображення в площині щілини складе Х 0 = βх0, де β - лінійне збільшення мікроскопа. У ФЕМ цього типу розмір щілини b рівний розміру зображення штриха βа, де а ширина штриха.

• Знайдемо величину світлового потоку, падаючого на приймач енергії випромінювання при довільному положенні штриха. Вважатимемо, що освітлювальна система створює в площині розсіюючого об'єкту освітленість Е, зовнішні джерела засвічення - освітленість Е 3 , тоді яскравість штриха L і поверхні об'єкту L 0 визначатиметься виразом: де ρ і ρ0 - коефіцієнти відбиття штриха і поверхні об'єкту відповідно.

Світловий потік Ф, що проходить через щілину, визначається виразом: де Аоб - числова апертура об'єктиву; h - висота щілини с = τАоб 2 , т - коефіцієнт пропускання оптичної системи. Отриманий вираз показує, що сигнал фотоприймача у разі лінійності його світлової характеристики буде пропорційний зсуву штриха х0.

Фотометричні ФЕМ з скануванням Інформація про зсув штриха щодо осі сканування виявляється з аналізу спектрального складу часового сигналу, що знімається з приймача енергії випромінювання. Розглянемо роботу фотометричного ФЕМ з скануванням, призначеного для використання в інтерференційних компараторах як орган наведення на штрих. Проте він без істотних змін конструкції може використовуватися і для вимірювання вельми малих зсувів штриха.

Зображення штриха, положення якого потрібно контролювати, проектується через об'єктив 1, напівпрозорий кубик 2 і окуляр 4 в площину щілини вібратора 5. Штрих освітлюється лампою 3. Електромагніти вібратора 5, живлені напругою частотою 50 Гц, порушують коливання якоря, на вільному кінці якого укріплені екран з щілиною. Як фотоприймач 6 застосований фотоелектричний помножувач (ФЕП). Його фотокатод розташований на відстані 2 см від площини щілини, яка забезпечує розсіювання світла, що проходить через щілину, по значній площі фотокатода і, отже, знижує вплив нерівномірності чутливості окремих ділянок фотокатода. Крім того, на такій відстані магнітне поле котушок збудження вібратора не впливає на роботу ФЕП. Електронна частина мікроскопа складається з виборчого підсилювача 7, синхронного детектора 8 і стрілочного приладу 9. Розмір зображення штриха в площині щілини встановлюють рівним останній, а амплітуду коливань щілини - рівній половині її ширини.

СКАНУЮЧІ МІКРОСКОПИ • Принцип дії таких мікроскопів полягає в тому, що об'єкт спостереження послідовно по певному закону сканування просвічується зондуючим випромінюванням ультрафіолетової, видимої або інфрачервоної області спектру. Пройдене через об'єкт випромінювання сприймається фотоприймачем, сигнал з якого управляє яскравістю відеоконтрольного пристрою (ВКП). Розгортка ВКП синхронізована із законом сканування об'єкту, тому на екрані ВКП виходить зображення об'єкту, просторовий розподіл яскравості в якому пропорційний просторовому розподілу коефіцієнта пропускання об'єкту. Основні переваги скануючих мікроскопів наступні: • наявність відеосигналу фотоприймача, який характеризує параметри об'єкту дослідження в кожній точці, що дає можливість проводити оперативну обробку цього сигналу широко відомими і розробленими методами електронно-обчислювальної техніки; • можливість отримання видимого зображення об'єкту в середній і дальній ІЧ області спектру в реальному масштабі часу.

Телевізійний скануючий мікроскоп · Окуляр 5 і об'єктив 4 мікроскопа працюють у зворотному ході променів і проектують на об'єкт 3 сильно зменшене зображення екрану електронно-променевої трубки 6, що виконує в даному випадку одночасно функції джерела випромінювання і скануючої системи. Випромінювання, що пройшло через об'єкт 3, збирається конденсором 2 і прямує на фотоприймач 1, відеосигнал з якого після підсилення підсилювачем 9 служить для управління яскравістю кінескопа. Розгортка в електроннопроменевих трубках 6 і 8 синхронізована задаючим блоком розгортки 7. Обробка відеосигналу фотоприймача здійснюється в блоці 10.

Просторова роздільна здатність d телевізійного мікроскопа визначається розміром світлової плями, що біжить, спроектованої на об'єкт. Якщо збільшення мікроскопа в прямому ході променів β, розмір екрану електронно-променевої трубки Н, число рядків в кадрі N, то: При цьому передбачається, що час післясвічення тп люмінофора екрану і постійна часу фотоприймача тф не перевищують допустимого значення тдоп, яке легко визначається при відомих параметрах розгортки (числі рядків в кадрі N і часу одного кадру t. K ): де m - коефіцієнт запасу (m = 3 -5); N 2 - число роздільних елементів в кадрі. Переваги: -дуже малий час дії світла на кожну точку об'єкту при тривалому спостереженні всього об'єкту на екрані електронно-променевої трубки; -можливість здійснення так званого «світлового уколу» .

Інфрачервоні скануючі мікроскопи

Представлений інфрачервоний мікроскоп, призначений для проглядання матеріалів прозорих в області 1 -7 мкм. Джерелом випромінювання служить глобар 1, тіло якого, що світиться, проектується в площину апертурної діафрагми дзеркального конденсора 5 системою, яка складається з одного увігнутого сферичного 3 і двох плоских 2 і 4 дзеркал. Конденсором служить працюючий в зворотному ході мікрооб'єктив того ж типу, що і об'єктив, встановлений в мікроскопі. Зображення об'єкту 6 проектується об'єктивом 7 і відхиляючими дзеркалами, 13 і 22 в площину діафрагми 21 діаметром 0, 2 мм. Дзеркало 13 виконує сканування по кадру, дзеркало 22 - по рядках. Привід дзеркал здійснюється за допомогою кулачків 8 і 24 від електродвигунів 12 і 29. Частота рядкової розгортки 4 Гц, частота кадрів 0, 04 Гц. Потік випромінювання, що пройшов через діафрагму 21, піддається модуляції. Модуляція здійснюється диском, що обертається, 20 з отворами, синхронним електродвигуном, що приводиться в рух, 23. Частота модуляції 2 к. Гц. Потік випромінювання, падаючий на фотоприймач 19, викликає появу електричного сигналу, що модулюється по амплітуді. Цей сигнал після посилення і детектування в блоці 16 поступає на підсилювачзмішувач 17, на інший вхід якого подаються імпульси рядкової і кадрової частоти, що гасяться, від синхронізуючого генератора 14.

Останній, у свою чергу, запускається імпульсами від фотодіодів 11 і 28, що виробляються у момент повернення дзеркал в початкове положення. Запускаючі імпульси утворюються в моменти, коли прорізи на дисках 10 і 27 проходять між джерелами підсвічування 9 і 26 і фотодіодами. Сигнал з підсилювача-змішувача 17 поступає на відеоконтрольний пристрій ВКП 18 для модуляції по яскравості променя електронно-променевої трубки. При цьому імпульси синхронізуючого генератора, що гасять, забезпечують гасіння екрану трубки при зворотному ході рядкової і кадрової розгорток. Для синхронізації розгортки електронного променя ВКП з скануванням зображення об'єкту служить блок розгортки 15, який управляється напругою з потенціометра 25 і імпульсами рядкової розгортки.

ІЧ-МІКРОСКОП, для неконтактного визначення температури по Іквипромінюванню в точках на поверхні мікросхем • складається з трьох каналів: освітлювального, візуального спостереження і радіометричного. • Освітлювальний канал і канал візуального спостереження утворені джерелом світла 6, конденсором 7, напівпрозорим дзеркалом 8, дзеркалами 5 і 9, дзеркальним об'єктивом 3, 4, окуляром 11 з сіткою 10. Ці канали призначені для вибору оператором певної ділянки мікросхеми 2, для вимірювання. Після виконання цієї операції оператор вимикає канали, виводячи з схеми дзеркало 9, і в дію вступає радіометричний канал мікроскопа. Цей канал працює таким чином:

Поверхня досліджуваної мікросхеми 2 об'єктивом проектується в площину світлочутливого майданчика фотоприймача 14. В результаті на майданчик падає потік випромінювання, пропорційний енергетичній яскравості елементу мікросхеми, оптично зв'язаного зі світлочутливим майданчиком, тобто залежний від температури цього елементу. Розмір а елементу визначається розміром світлочутливого майданчика b і збільшенням β об'єктиву а = b / β. Потік випромінювання перед фотоприймачем модулюється диском 13, що приводиться в обертання синхронним двигуном 12. Змінний електричний сигнал фотоприймача після підсилення і перетворення поступає на швидкодіючий цифродрукуючий пристрій, який окрім рівня сигналу друкує координати вимірюваного елементу мікросхеми. Сканування всієї поверхні мікросхеми здійснюється предметним столом 1, який має можливість дискретного переміщення по осях х і у. Вибір швидкостей кроку, закону і області сканування виконує блок програмного управління.
 малого діаметру,")
Лазерний скануючий мікроскоп • У таких мікроскопах можна отримати світлову пляму (зонд) малого діаметру, порівняного з довжиною хвилі випромінювання лазера, і, отже, підвищити роздільну здатність мікроскопа. Крім того, велика спектральна щільність випромінювання лазера дає можливість істотно збільшити чутливість приладів і працювати на різних довжинах хвиль, включаючи середню ІЧ-ОБЛАСТЬ спектру, де звичайні джерела світла не можуть бути застосовані із-за слабкої інтенсивності випромінювання. Використовуються в основному для контролю матеріалів і виробів напівпровідникової техніки. Джерелами випромінювання в них служать зазвичай Не—Ne- і СО 2 лазери з робочими довжинами хвиль 6. 28 і 10, 6 мкм відповідно.

Випромінювання Не-Ne лазера з довжиною хвилі 6. 28 мкм формується оптичною системою 5 і 6 і фокусується на поверхні об'єкту дослідження 12, утворюючи тим самим зонд діаметром близько 10 мкм. За допомогою дзеркал кадрової 7 і рядкової 11 розгорток зонд здійснює відрядкове сканування об'єкту. Пройдене через об'єкт випромінювання фокусується конденсором 13 на фотоприймач 14. Дзеркало кадрової розгортки приводиться в рух кулачком 2 від електродвигуна 1, дзеркало рядкової розгортки електромагнітним вібратором 10. Візуалізація зображення об'єкту здійснюється на екрані ТП 9, розгортка якого синхронізована з розгорткою зонда по поверхні зразка. Синхронізація рядкових розгорток ТП і дзеркала 11 забезпечується тим, що вони керуються одним і тим же задавальним блоком 4, а синхронізація кадрових розгорток - потенціометром 8, керуючим роботою блоку 3 кадрових розгортки ВКП.
 про об'єкти і процеси")
ІНТРОСКОПИ • Основною функцією інтроскопії є спостереження візуальної інформації (зображення) про об'єкти і процеси в оптично непрозорих тілах і середовищах, а також в умовах поганої видимості. • У неруйнівному контролі за допомогою інтроскопів виконується виявлення і ідентифікація різних відхилень від заданих характеристик виробів, тіл і середовищ, спостереження з метою контролю і діагностування процесів, що відбуваються в напівпрозорих і непрозорих механізмах і середовищах. • Розрізняють контактний і безконтактний методи контролю. • У схемі контактного контролю для відображення інформації чутливому елементу необхідний механічний контакт з елементами об'єкту. При безконтактному контролі здійснюється дистанційне сприйняття інформації з доставкою її споживачеві. Контактні засоби інтроскопіювання і дефектації прості по конструкції, проте мають обмежене поле огляду. У зв'язку з цим вони застосовуються переважно для контролю дискретних дефектів із заздалегідь відомим просторовим розташуванням. Пошук дефекту за допомогою контактних засобів скрутний і не виключає випадків його пропуску.

При використанні безконтактних засобів інтроскопіювання і дефектації певну складність представляють процеси виявлення джерела інформації, формування повідомлення і захисту технологічної інформації від різних перешкод, які виявляються в дистальній області інтроскопа більшою мірою, чим в процесі перетворення і передачі зображення об'єкту. Інформація, втрачена на першому етапі, надалі технічними засобами інтроскопії не відновлюється. Ця обставина особливо виявляється в умовах агресивних середовищ; у запилених і задимлених зонах; при інтроскопіюванні вибухонебезпечних і радіоактивних об'єктів, що функціонують у високотемпературних режимах і в польових умовах. При цьому застосовуються схеми з розташуванням джерела випромінювання безпосередньо в зоні огляду або з дистанційною передачею випромінювання від джерела в зону, що оглядається.

У загальному вигляді інтроскопом є сукупність взаємозв'язаних жорсткою А, напівжорсткою Б і гнучкою В частин і корпусу К. З гнучкою частиною пов'язаний дистальний кінець, в якому розташований первинний приймач 6 випромінювань, параметри якого регулюються ручкою 5; управління просторовим положенням дистального кінця здійснюється рукояткою 4. Для виведення зображення передбачається пристрій відображення 3. Освітлювач 1 волоконно-оптичного зв'язку 2 передає світловий потік в зону огляду.

Жорсткість волоконного тракту інтроскопів. · Залежно від переважання тієї або іншої частини розрізняють жорсткі, напівжорсткі, гнучкі і комбіновані волоконні інтроскопи. Комбінований інтроскоп є універсальним оптичним засобом, що забезпечує практично будь-який вид оптичного інтроскопіювання і дефектації. Спеціальні інтроскопи будуються з орієнтацією на певні види випромінювання, контролю або об'єктів. Жорсткі інтроскопи Грунтуються на лінзових, волоконно-оптичних або інших оптичних системах передачі зображення, що розміщуються в жорстких захисних оболонках.

Схема огляду циліндра двигуна : 1 - поле підсвічування; 2 об‘єктивна частина; 3 поле зору; 4 - лінія візування; 5 - телескопічна труба. Інтроскоп з гнучким механічним і оптичним зв'язком 2 дистального приймача 1 з жорсткою частиною 4. Регулятор різкості 6 суміщений з ручкою управління 5. З корпусом зв'язані освітлювальний джгут 8 і окуляр 7. За рахунок великого кута вигину дистального кінця 2 забезпечується, наприклад, можливість огляду горловини балона 3.

Комбінований інтроскоп За рахунок напівжорсткої частини 3 дистальний кінець з гнучкою частиною 2 орієнтується по заданому напряму до введення в контрольований простір об'єкту. Жорстка частина 4 інтроскопа забезпечує фіксацію його в спеціальних оглядових лючках. Ручкою управління 5 здійснюється сканування контрольованої поверхні в одній або двох площинах. Для зв'язку з освітлювачем 9 передбачається джгут 8, а зображення розглядається через окуляр 7.

Конструкції і характеристики волоконних інтроскопів Інтроскоп з об'єднанням оптичних каналів передачі світла I і зображення ll. Освітлювальний канал I включає джерело світла 1, волоконно-оптичний джгут 3, світловий потік на виході якого освітлює об'єкт 5. Інформаційний канал II об'єднує об'єктив 4, що формує і масштабує зображення відповідно до параметрів когерентного волоконнооптичного джгута 6, окуляра 2.

На перетворенні координати світлового штриха на об'єкті в координату його зображення на відліковій шкалі пристрою відображення будується комбінований вимірник глибини залягання різних дефектів. У такій конструкції додатково до основного освітлювального каналу 1 вбудовується канал 3, що формує на об'єкті 6 світловий штрих 7. Зображення контрольованої зони сприймається граданом 5 і контактно проектується на вхідний торець фокону 4, вихід якого сполучений з волоконним джгутом 8. За рахунок застосування граданів, в якості об'єктивів, зменшуються габаритні розміри інтроскопа і створюється можливість проникнення його в порожнини малих поперечних розмірів. Залежно від глибини дефекту світловий штрих змінює своє положення на штриховій шкалі елементу 9, яке прочитується через окуляр 2 спостерігачем.
")
Основні характеристики технічних інтроскопів Загальний вид суміщеного ендоскопа для огляду труднодоступних порожнин людини (а) і окулярна частина (б) ендоскопа: 1 - освітлювач; 2 - освітлювальні джгути; 3 - окуляр; 4 - інформаційні джгути; 5 - контрольовані порожнини; 6 - роз‘єм оптичний; 7 - оболонка; 8 - призма

З погляду практичного застосування більш загальною характеристикою є приналежність інтроскопа до конкретного об'єкту, наприклад інтроскоп для контролю двигунів і корпусних виробів, інтроскоп камери згорання і так далі. Всі технічні характеристики таких інтроскопів визначаються вимогами технологічного контроля. Якщо на вхідний торець щільно і паралельно укладеного пучка світлопроводів спроектувати зображення, яскравість і колір якого міняються безперервно, то на вихідному торці (через усереднювання цих параметрів зображення по перетину кожної елементарної жили) отримаємо мозаїчну картину, що складається з дискретних крапок. Відзначимо, що подібна дискретизація зображення має місце і в сітківці ока людини. Форма крапок зазвичай повторює форму перетину елементарного волокна на його вході, але може і відрізнятися від неї. Зазвичай на кінцях джгута волокна проклеєні, тому його вигин не порушує додатково структуру, що передає зображення. Такі джгути застосовуються, наприклад, в інтроскопах і ендоскопах - приладах для огляду труднодоступних порожнин. У жорстких волоконних деталях (фоконах, лінзах, планшайбах) структура зображення також строго фіксована. Ці деталі дозволяють виводити на зовнішню поверхню кінескопа зображення, сформоване електронним променем; здійснювати його контактну фотореєстрацію; сполучати в контакт модулі електронно-оптичних перетворювачів; виправляти дисторсію і кривизну зображення в світлосильних об'єктивах.

Здатність пучка волокон передавати без спотворення інформацію просторовий і спектральний розподіл яскравості у вхідному зображенні оцінюється за допомогою роздільної здатності і кривої спектрального світлопропускання. Якість передачі зображення оцінюють також за допомогою частотно-контрастної характеристики. Передача зображення здійснюється тільки світловедущими жилами волокон. При цьому, якщо два елементи зображення потраплять в межі перетину однієї жили, то на вихідному торці ми не отримаємо їх роздільного зображення, а тільки рівномірне освітлення перетину. Площа, зайнята порожнечами і оболонками волокон, безпосередньо в передачі зображення не бере участь. Важливою характеристикою інтроскопа є роздільна здатність, яку прийнято вимірювати числом чорних штрихів (чорно-білих пар), що доводяться на 1 мм і ще помітних в зображенні. Дефекти укладання волокон, облом і сколи волокон, нерівномірність їх пропускання, просочування світла в сусідні волокна знижують роздільну здатність джгута. Підвищення роздільної здатності і зменшення видимості мозаїчної структури зображення може бути досягнуте шляхом сканування торця джгута щодо зображення, оскільки при цьому жили захоплюватимуть ті частини зображення, які при статичній передачі співпадали з неробочими ділянками торця джгута.

Переміщення джгута повинне бути рівне приблизно п'яти діаметрам волокна, а частота сканування - вище за критичну частоту миготіння, помітну оком людини. Рухи торців джгута можуть бути періодичними або безладними, але обов'язково строго однаковими і синфазними. Замість коливань джгутів зручніше зміщувати зображення на вході і виході джгута. Для цього, наприклад, застосовують оптичні клини, що обертаються, розташовані перед об'єктивом ендоскопа і його окуляром. На роздільну здатність регулярного джгута впливає просочування світла між окремими волокнами, а також випромінювання, що проходить по їх оболонках. Це приводить до паразитного засвічення зображення.

Різновиди вимірювальних інтроскопів Схема інтроскопа з фотоприставкою: / - об'єкт; 2 - окуляр; 3 - фотоприставка; 4 - джерело світла; 5 –джгут освітлювальний; 6 - захисна оболонка; 7 - кільце; 8 - когерентний джгут; 9 - об'єктив; 10 - призма

Схема диференціального волоконно-оптичного зонда

Схема датчика прозорості 5 6 7 Випромінювання джерела 1 формується лінзою 2 і по джгуту світлопроводів 3 передається на вихід 4, де направлене оптичне поле 5 взаємодіє з контрольованим середовищем 6 і потрапляє в приймач випромінювання 7, пов'язаний з джгутом світлопроводів 8, на виході якого встановлений фотоприймач 9. Таким чином, без одержання проби відображається інформація прозорість середовища 6. За рахунок використання оптичних елементів підвищується перешкодозахищеність і знижується вплив коливань температури.

Схема огляду фільєри інтроскопом Для профілактичного огляду стану фільєр 1, призначених для витяжки волокон 5, використовується волоконно-оптичний інтроскоп, занурений в агресивне середовище 7. Індивідуальне джерело 2 освітлює фільєру, а її зображення сприймається об'єктивом 5, передається по джгуту 4 і відображається в окулярі 6. Фіксація інтроскопа щодо судини здійснюється за допомогою упору 5. Без зупинки процесу формування волокон оператор за допомогою інтроскопа встановлює факт засмічення фільєр або інші відхилення в ході витяжки.

Волоконно-оптичні прилади • Волоконними світлопроводами є тонкі нитки спеціальної конструкції, виготовлені з матеріалу, прозорого для використовуємого випромінювання. Ці нитки часто називають «оптичними волокнами» . Вони служать хвилеводами в лініях зв'язку протяжністю від сантиметрів до сотень і тисяч кілометрів, а також для конструювання всіляких датчиків різних фізичних величин. • Структура волоконного світловода може бути ступінчастою або градієнтною. • У першому випадку оптичне волокно повинне бути двошаровим і складатися з однорідного осердя і оболонки, що оточує його. Показник заломлення осердя n 1 повинен бути вище за показник заломлення оболонки n 2. Такий світловід називають ступінчастим, тому що в нім на межі осердя - оболочка показник заломлення змінюється стрибком на величину n 1 -n 2

У градієнтних світловодах, використовуваних в системах зв'язку, профіль зміни показника заломлення зазвичай дуже близький до параболічного. Зовні волоконний світловід повинен бути покритий захисною оболонкою, оптичні властивості якої беруть до уваги лише у випадках поглинання нею променів, по тих або інших причинах що вийшов з оптичного волокна. Промені, що розповсюджуються в осерді світловодів під кутами 0< θz < θс по відношенню до його осі, підлягають повному внутрішньому віддзеркаленню на межі осердя -оболочка, якщо кут повного внутрішнього віддзеркалення, визначуваний співвідношеннями.

Якщо , то промені, проникаючі ззовні в торець осердя, заломлюючись в нім на межі осердя -оболочка, проникатимуть в оболочку. Розглядаючи хід променів, падаючих на торець світловода ззовні, і променів, що проникли в осердя можна бачити, що кожному значенню кута відповідає своє значення кута падіння променя на торець світловода. Кут, при якому промінь, що заломився на межі середовищеосердя світловода, розповсюджуватиметься в світловоді під кутом до осі осердя, називається вхідним кутом світловода. Його значення можна вказувати в градусах, але частіше цей кут характеризують величиною апертури , де n 0 -показник заломлення середовища, з якого падає промінь на торець світловода. Якщо світловід оточений повітрям, то n 0 =1 і. Для ступінчастого світловода числова апертура, а для градієнтного волоконного світловода справедливі співвідношення.
!оптический21.12.2011 контрольУКР!.ppt