

Презентация_Коровушкина.pptx
- Количество слайдов: 13
 Комбинированное управление") Виды управления летательными аппаратами Автономное Самонаведение Телеуправление (ТУ-1, ТУ-2) Комбинированное управление
Виды управления летательными аппаратами Автономное Самонаведение Телеуправление (ТУ-1, ТУ-2) Комбинированное управление
 Кинематические методы наведения ракет на цель Метод пропорционального наведения Метод накрытия цели
Кинематические методы наведения ракет на цель Метод пропорционального наведения Метод накрытия цели
 Способы измерения параметра рассогласования В зависимости от способа изменения угловой скорости") Системы самонаведения а) Способы измерения параметра рассогласования В зависимости от способа изменения угловой скорости различают варианты построения систем самонаведения: 1. Система со следящим гироприводом 2. Система со следящей антенной и гироскопическими датчиками угловых скоростей (ДУС)
Системы самонаведения а) Способы измерения параметра рассогласования В зависимости от способа изменения угловой скорости различают варианты построения систем самонаведения: 1. Система со следящим гироприводом 2. Система со следящей антенной и гироскопическими датчиками угловых скоростей (ДУС)
 Система со следящим гироприводом Функциональная схема
Система со следящим гироприводом Функциональная схема
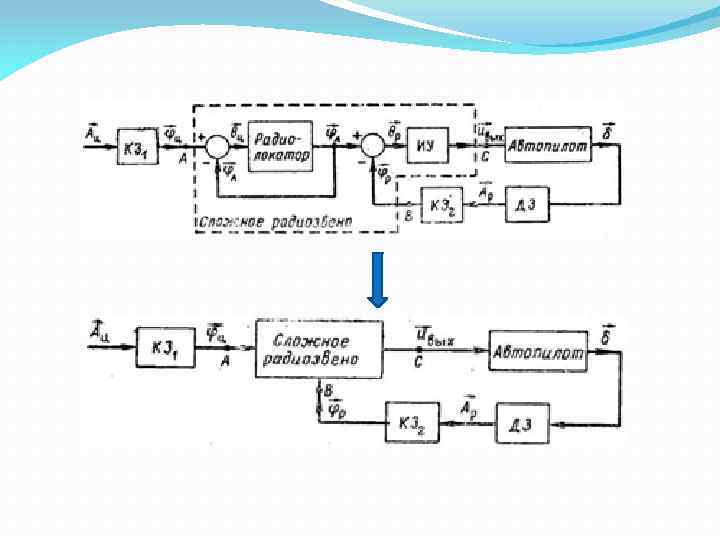
 Структурная схема 1 2 3 4
Структурная схема 1 2 3 4
 Основные источники ошибок самонаведения 1. Ошибки наведения, вызываемые инерционностью управления при наличии маневров") б) Основные источники ошибок самонаведения 1. Ошибки наведения, вызываемые инерционностью управления при наличии маневров цели 2. Ошибки наведения, вызываемые ограниченной маневренностью ракеты, при большой кривизне траектории, обусловленной выбранным кинематическим методом наведения 3. Ошибки наведения, вызываемые ограниченной маневренностью ракеты, при большой кривизне траектории, обусловленной действием приборных ошибок
б) Основные источники ошибок самонаведения 1. Ошибки наведения, вызываемые инерционностью управления при наличии маневров цели 2. Ошибки наведения, вызываемые ограниченной маневренностью ракеты, при большой кривизне траектории, обусловленной выбранным кинематическим методом наведения 3. Ошибки наведения, вызываемые ограниченной маневренностью ракеты, при большой кривизне траектории, обусловленной действием приборных ошибок
 4. Ошибки наведения, вызываемые приборными ошибками при наличии мертвой зоны управления 5. Ошибки наведения, вызванные начальной ошибкой упреждения при малой начальной дальности до цели, т. е. неточность выдерживания направления вектора в момент перехода на самонаведение 6. Ошибки наведения, вызванные полной потерей цели головкой самонаведения, например вследствие действия сильных помех.
4. Ошибки наведения, вызываемые приборными ошибками при наличии мертвой зоны управления 5. Ошибки наведения, вызванные начальной ошибкой упреждения при малой начальной дальности до цели, т. е. неточность выдерживания направления вектора в момент перехода на самонаведение 6. Ошибки наведения, вызванные полной потерей цели головкой самонаведения, например вследствие действия сильных помех.
 Для повышения точности самонаведения: 1. Уменьшение вероятности срыва слежения за целью. 2. Уменьшение величины мертвой зоны управления. 3. Увеличение маневренности ракеты (ее максимального поперечного ускорения ). 4. Уменьшение кривизны требуемой кинематической траектории (т. е. выбор соответствующего кинематического метода наведения).
Для повышения точности самонаведения: 1. Уменьшение вероятности срыва слежения за целью. 2. Уменьшение величины мертвой зоны управления. 3. Увеличение маневренности ракеты (ее максимального поперечного ускорения ). 4. Уменьшение кривизны требуемой кинематической траектории (т. е. выбор соответствующего кинематического метода наведения).
 Системы Телеуправления ТУ-1 ТУ-2
Системы Телеуправления ТУ-1 ТУ-2
 ТУ-1 Ошибка автослежения за целью
ТУ-1 Ошибка автослежения за целью
 ТУ-2
ТУ-2
 Точность и дальность действия ТУ-1 При наведении по методу накрытия цели промах: 1. при больших дальностях промах возрастает с ростом дальности по линейному закону или даже более резко. 2. максимальная дальность действия системы телеуправления определяется требуемой точностью наведения ракеты на цель. 3. как максимальная дальность, так и соответствующая ей точность наведения лимитируется в основном каналом контроля цели, т. е. дальностью и точностью действия радиолокатора, определяющего координаты цели и параметры ее движения.
Точность и дальность действия ТУ-1 При наведении по методу накрытия цели промах: 1. при больших дальностях промах возрастает с ростом дальности по линейному закону или даже более резко. 2. максимальная дальность действия системы телеуправления определяется требуемой точностью наведения ракеты на цель. 3. как максимальная дальность, так и соответствующая ей точность наведения лимитируется в основном каналом контроля цели, т. е. дальностью и точностью действия радиолокатора, определяющего координаты цели и параметры ее движения.