ab50548720972f78eb08a6023ba6b728.ppt
- Количество слайдов: 12



Веремей Е. И.

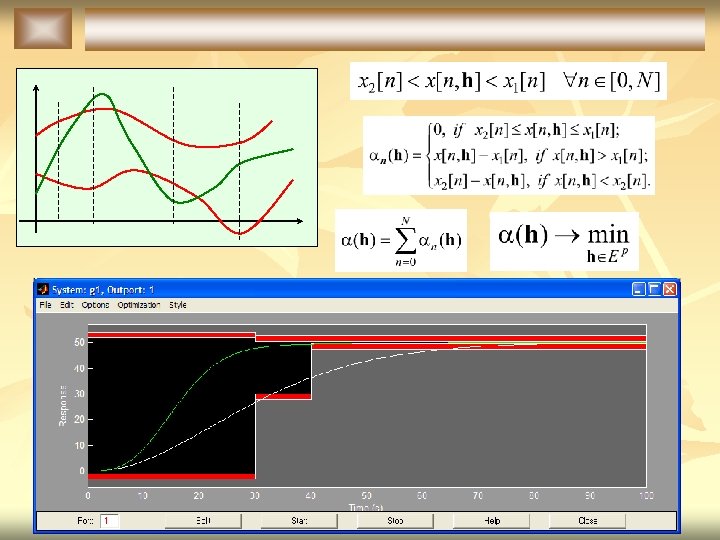
5. Формы необходимых условий экстремума:

Модель дискретного объекта Ограничения на управление Ограничения на состояние Цель управления Функционал качества
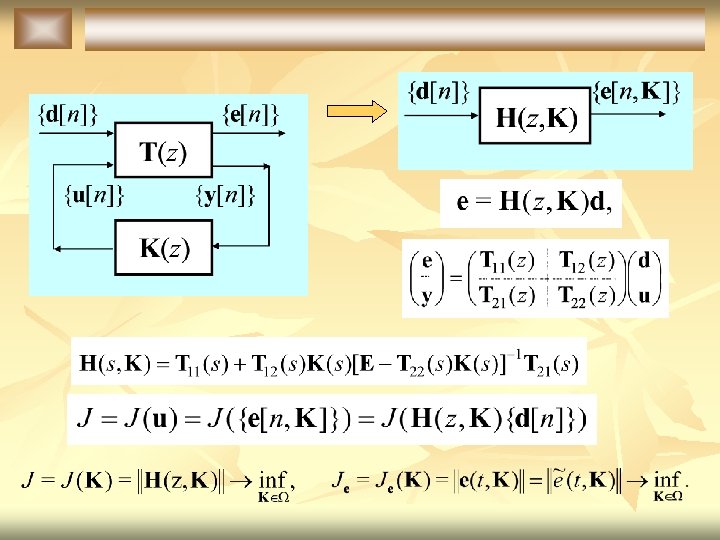

Пусть задан объект управления в виде DLTI системы и регулятор Математическая модель замкнутой системы в частотной области:

DLTI-система Желаемый хар. полином Регулятор по состоянию Пример: Собственные значения матрицы A Период дискретности: T=0. 025 c Корни желаемого характеристического полинома:

Уравнения замкнутой системы - нормирующий множитель Переходные процессы в замкнутой системе для различных величин γ

DLTI-объект Регулятор по состоянию дискретного объекта Квадратичный функционал, заданный на движениях замкнутой системы: Задача LQR-оптимального синтеза
 стабилизируемая Решение задачи LQR-оптимального синтеза: Здесь матрица S –")
Ограничения: 1. Пара (A, B) стабилизируемая Решение задачи LQR-оптимального синтеза: Здесь матрица S – решение матричного алгебраического уравнения Риккати:

Объект: Регулятор:

Конечномерная оптимизация Оптимизация Робастное управление Модальное управление
ab50548720972f78eb08a6023ba6b728.ppt