

99b87ab7c7b1065d7bd79d19ffc26763.ppt
- Количество слайдов: 154
 Устройства автоматического регулирования АРВ синхронных машин Назначение: • Повышение устойчивости параллельной работы отдельных генераторов между собой и всей системы в целом. • Поддержание напряжения на требуемом уровне в узлах системы и у потребителей. • Ускорение восстановления нормального режима при самозапуске и после отключения КЗ. В зависимости от параметров, на которые АРВ реагирует, и характера реакции АРВ подразделяют на: • АРВ пропорционального действия (АРВ) • АРВ сильного действия (АРВ СД) В АРВ пропорционального действия в качестве управляющих воздействий используется отклонение тока и напряжения от заданных уставок. Это устройства компаундирования с электромагнитным корректором напряжения. Осуществляют изменение тока возбуждения в зависимости от тока статора и напряжения статора. Действуют достаточно медленно, имеют статическую ошибку по напряжению.
Устройства автоматического регулирования АРВ синхронных машин Назначение: • Повышение устойчивости параллельной работы отдельных генераторов между собой и всей системы в целом. • Поддержание напряжения на требуемом уровне в узлах системы и у потребителей. • Ускорение восстановления нормального режима при самозапуске и после отключения КЗ. В зависимости от параметров, на которые АРВ реагирует, и характера реакции АРВ подразделяют на: • АРВ пропорционального действия (АРВ) • АРВ сильного действия (АРВ СД) В АРВ пропорционального действия в качестве управляющих воздействий используется отклонение тока и напряжения от заданных уставок. Это устройства компаундирования с электромагнитным корректором напряжения. Осуществляют изменение тока возбуждения в зависимости от тока статора и напряжения статора. Действуют достаточно медленно, имеют статическую ошибку по напряжению.
 В АРВ СД в качестве управляющих воздействий используется отклонение тока, напряжения и частоты, а также производные от этих и других, связанными с ними, параметров. АРВ СД, как объект управления, оказывает на систему возбуждения генератора более сильное (интенсивное) воздействие по сравнению с АРВ СД позволяет предвидеть переходной процесс и вовремя подавать управляющие сигналы. Они не имеют заметной статической ошибки, отличаются большим быстродействием, следовательно, должны применяться на генераторах с быстродействующими системами возбуждения (мощные генераторы с тиристорными системами возбуждения). Генератор, как объект регулирования АРВ ОВВ UГ
В АРВ СД в качестве управляющих воздействий используется отклонение тока, напряжения и частоты, а также производные от этих и других, связанными с ними, параметров. АРВ СД, как объект управления, оказывает на систему возбуждения генератора более сильное (интенсивное) воздействие по сравнению с АРВ СД позволяет предвидеть переходной процесс и вовремя подавать управляющие сигналы. Они не имеют заметной статической ошибки, отличаются большим быстродействием, следовательно, должны применяться на генераторах с быстродействующими системами возбуждения (мощные генераторы с тиристорными системами возбуждения). Генератор, как объект регулирования АРВ ОВВ UГ
 является обмотка возбуждения возбудителя, т. е. выходной сигнал АРВ воздействует на") Входом объекта (генератора) является обмотка возбуждения возбудителя, т. е. выходной сигнал АРВ воздействует на ток возбуждения возбудителя. Выходом объекта являются выходные зажимы генератора. Uг = Eг - только в режиме холостого хода. Для нагруженного генератора напряжение на выводах отличается от ЭДС генератора на величину потери напряжение на сопротивлении генератора. Величина и знак UГ зависит от cos Г: Uг = Eг – j·Xd·Iг При нагруженном генераторе Uг < Eг – при активно-индуктивной нагрузке Uг > Eг – при активно-емкостной нагрузке
Входом объекта (генератора) является обмотка возбуждения возбудителя, т. е. выходной сигнал АРВ воздействует на ток возбуждения возбудителя. Выходом объекта являются выходные зажимы генератора. Uг = Eг - только в режиме холостого хода. Для нагруженного генератора напряжение на выводах отличается от ЭДС генератора на величину потери напряжение на сопротивлении генератора. Величина и знак UГ зависит от cos Г: Uг = Eг – j·Xd·Iг При нагруженном генераторе Uг < Eг – при активно-индуктивной нагрузке Uг > Eг – при активно-емкостной нагрузке
 = 0, cos = 1 - чисто активная нагрузка = 90, cos = 0 - чисто индуктивная нагрузка В первом случае падение напряжения вычитается из ЕГ геометрически, во втором – арифметически.
= 0, cos = 1 - чисто активная нагрузка = 90, cos = 0 - чисто индуктивная нагрузка В первом случае падение напряжения вычитается из ЕГ геометрически, во втором – арифметически.
 Из диаграмм видно, что возмущающим фактором является не только Iген, но и характер нагрузки (cos ) Внешняя (нагрузочная) характеристика генератора UГ =f(IГ) при различных cos : : Из внешних характеристик можно найти важный параметр объекта регулирования – коэффициент статизма: Кст. = - Uг/ Iг
Из диаграмм видно, что возмущающим фактором является не только Iген, но и характер нагрузки (cos ) Внешняя (нагрузочная) характеристика генератора UГ =f(IГ) при различных cos : : Из внешних характеристик можно найти важный параметр объекта регулирования – коэффициент статизма: Кст. = - Uг/ Iг
 и расфорсировки При снижении напряжения, обусловленного внешними КЗ") Релейные устройства быстродействующей форсировки возбуждения (УБФ) и расфорсировки При снижении напряжения, обусловленного внешними КЗ или самозапуском мощных двигателей, УБФ скачкообразно меняет ток возбуждения и поднимает напряжение на возбудителе до потолочного значения. - сопротивление ротора в нагретом состоянии КВ=1. 05 – 1. 1 (РН - 54) КН=1. 1 Обычно
Релейные устройства быстродействующей форсировки возбуждения (УБФ) и расфорсировки При снижении напряжения, обусловленного внешними КЗ или самозапуском мощных двигателей, УБФ скачкообразно меняет ток возбуждения и поднимает напряжение на возбудителе до потолочного значения. - сопротивление ротора в нагретом состоянии КВ=1. 05 – 1. 1 (РН - 54) КН=1. 1 Обычно
 При снижении напряжения ниже уставки срабатывает реле KV 1, контактами KV 1 запитывается контактор KM 1, который своими контактами KM 1 шунтирует часть сопротивления R и обеспечивает увеличение напряжения до потолочного значения.
При снижении напряжения ниже уставки срабатывает реле KV 1, контактами KV 1 запитывается контактор KM 1, который своими контактами KM 1 шунтирует часть сопротивления R и обеспечивает увеличение напряжения до потолочного значения.
 В реальных схемах ставят последовательно два реле напряжения, которые включены на разные напряжения фаз, или применяют пуск от фильтров реле напряжения прямой последовательности, которые обеспечивают гарантированный пуск при всех видах удаленных КЗ. Контакты РПВ выводят УБФ из работы при отключении выключателя, т. к. при работе генератора на холостом ходу форсировка может привести к значительному повышению напряжения на обмотке статора, опасному для изоляции. Контакт автоматического выключателя также блокирует работу УБФ при его отключении. Кратность форсировки обычно ограничивается на уровне 2. На мощных генераторах с непосредственным охлаждением, которые не допускают длительной перегрузки по току статора и току ротора, применяют специальные устройства для ограничения длительности ФВ: Для генераторов серии ТВФ при К=2, tдоп=30 с, при К=1, 2 – tдоп=240 с. Для генераторов серии ТВВ при К=2, tдоп=20 с и при К=1, 5 tдоп=60 с.
В реальных схемах ставят последовательно два реле напряжения, которые включены на разные напряжения фаз, или применяют пуск от фильтров реле напряжения прямой последовательности, которые обеспечивают гарантированный пуск при всех видах удаленных КЗ. Контакты РПВ выводят УБФ из работы при отключении выключателя, т. к. при работе генератора на холостом ходу форсировка может привести к значительному повышению напряжения на обмотке статора, опасному для изоляции. Контакт автоматического выключателя также блокирует работу УБФ при его отключении. Кратность форсировки обычно ограничивается на уровне 2. На мощных генераторах с непосредственным охлаждением, которые не допускают длительной перегрузки по току статора и току ротора, применяют специальные устройства для ограничения длительности ФВ: Для генераторов серии ТВФ при К=2, tдоп=30 с, при К=1, 2 – tдоп=240 с. Для генераторов серии ТВВ при К=2, tдоп=20 с и при К=1, 5 tдоп=60 с.
 Таким образом, при повышении ЭДС генераторов в послеаварийном режиме может быть исключено нарушение устойчивости параллельной работы, в цикле качаний, облегчить самозапуск ЭД. На гидрогенераторах с электромашинными СВ предусматриваются также релейные устройства расфорсировки, предназначенные для ограничения опасных повышений напряжения на выводах статора вследствие увеличения частоты при аварийных сбросах нагрузки. Вследствие большой инерционности гидроагрегата возможно увеличение частоты на 30% (и более), следовательно произойдет недопустимое увеличение напряжения. КМ 2 – вводит добавочное сопротивление, и ограничивает Iв УБФ снабжаются все генераторы, независимо от системы возбуждения, только у быстродействующих систем возбуждения УБФ выполнен на бесконтактных элементах.
Таким образом, при повышении ЭДС генераторов в послеаварийном режиме может быть исключено нарушение устойчивости параллельной работы, в цикле качаний, облегчить самозапуск ЭД. На гидрогенераторах с электромашинными СВ предусматриваются также релейные устройства расфорсировки, предназначенные для ограничения опасных повышений напряжения на выводах статора вследствие увеличения частоты при аварийных сбросах нагрузки. Вследствие большой инерционности гидроагрегата возможно увеличение частоты на 30% (и более), следовательно произойдет недопустимое увеличение напряжения. КМ 2 – вводит добавочное сопротивление, и ограничивает Iв УБФ снабжаются все генераторы, независимо от системы возбуждения, только у быстродействующих систем возбуждения УБФ выполнен на бесконтактных элементах.
 Компаундирование возбуждения генераторов Компаундирование возбуждением является примером регулирования "по возмущению". Здесь главным возмущающим фактором является ток генератора. Поэтому ток генератора используется в качестве управляющего параметра в системе возбуждения. ТА VD УР
Компаундирование возбуждения генераторов Компаундирование возбуждением является примером регулирования "по возмущению". Здесь главным возмущающим фактором является ток генератора. Поэтому ток генератора используется в качестве управляющего параметра в системе возбуждения. ТА VD УР
 Для этого вторичный ток ТТ, установленных на выводах обмотки статора, через промежуточный трансформатор TL и выпрямитель VD подается на обмотку возбуждения возбудителя и суммируется с токов IВ. Ток в ОВВ (LE) равен сумме токов Iв и Iк. Iк – получается пропорциональным Iг к – зависит от КТА и КTL Таким образом, при увеличении тока статора увеличивается ток в ОВВ, увеличивается ток возбуждения и соответственно ЕГ, компенсируя возросшее UГ – поддерживается неизменным напряжение на выводах обмотки статора (в идеале). При больших токах (токах КЗ) обеспечивается форсировка возбуждения. ПТ – для согласования вторичного тока с током компаундирования. УР – установочный реостат, обеспечивает регулирование IК. Недостатки УК
Для этого вторичный ток ТТ, установленных на выводах обмотки статора, через промежуточный трансформатор TL и выпрямитель VD подается на обмотку возбуждения возбудителя и суммируется с токов IВ. Ток в ОВВ (LE) равен сумме токов Iв и Iк. Iк – получается пропорциональным Iг к – зависит от КТА и КTL Таким образом, при увеличении тока статора увеличивается ток в ОВВ, увеличивается ток возбуждения и соответственно ЕГ, компенсируя возросшее UГ – поддерживается неизменным напряжение на выводах обмотки статора (в идеале). При больших токах (токах КЗ) обеспечивается форсировка возбуждения. ПТ – для согласования вторичного тока с током компаундирования. УР – установочный реостат, обеспечивает регулирование IК. Недостатки УК
 1. Для получения необходимого тока от ТА требуется большая мощность, и при КЗ ТА могут насыщаться, следовательно, для АРВ выделяется отдельная группа ТА на которые больше ничего не подключается. В нормальном режиме УК потребляет 300 -400 ВА, при КЗ мощность возрастает примерно в 5 -6 раз. Нагрузочные характеристики ------ без компаундирования с компаундированием
1. Для получения необходимого тока от ТА требуется большая мощность, и при КЗ ТА могут насыщаться, следовательно, для АРВ выделяется отдельная группа ТА на которые больше ничего не подключается. В нормальном режиме УК потребляет 300 -400 ВА, при КЗ мощность возрастает примерно в 5 -6 раз. Нагрузочные характеристики ------ без компаундирования с компаундированием
 2. Из характеристик видно, что обеспечить постоянный уровень напряжения невозможно, т. к. есть нелинейные элементы и зависимость U от I нелинейная. При неизменном Iк сохраняется зависимость напряжения генератора от cos. 3. До значения тока Iпк компаундирование не вступает в действие, т. к. диодный мост будет закрыт, пока U 2 не станет больше. UОВВ. Этот ток называют порогом компаундирования. Этот недостаток можно устранить, если осуществить суммирование не тока ОВВ и тока компаундирования, а потоков, но для этого необходимо иметь дополнительную ОВВ (на рисунке показана пунктирной линией). 4. УК не обеспечивает достаточную форсировку возбуждения при удаленных КЗ, когда увеличение тока незначительно (необходимо иметь УБФ). Поэтому устройство компаундирования дополняется регулятором напряжения - электромагнитным корректором напряжения.
2. Из характеристик видно, что обеспечить постоянный уровень напряжения невозможно, т. к. есть нелинейные элементы и зависимость U от I нелинейная. При неизменном Iк сохраняется зависимость напряжения генератора от cos. 3. До значения тока Iпк компаундирование не вступает в действие, т. к. диодный мост будет закрыт, пока U 2 не станет больше. UОВВ. Этот ток называют порогом компаундирования. Этот недостаток можно устранить, если осуществить суммирование не тока ОВВ и тока компаундирования, а потоков, но для этого необходимо иметь дополнительную ОВВ (на рисунке показана пунктирной линией). 4. УК не обеспечивает достаточную форсировку возбуждения при удаленных КЗ, когда увеличение тока незначительно (необходимо иметь УБФ). Поэтому устройство компаундирования дополняется регулятором напряжения - электромагнитным корректором напряжения.
 Электромагнитный корректор напряжения осуществляет сравнение регулируемого напряжения с опорным, определяет знак отклонения и вырабатывает управляющие сигналы на изменение тока возбуждения возбудителя (регулирование по отклонению). Совместно с устройством компаундирования электромагнитный корректор поддерживает напряжение на выводах генератора по заданному закону или на заданном уровне (можно задать коэффициент статизма). Электромагнитный корректор состоит из измерительного органа (ИО) и силового органа (СО). Измерительный орган подключается к трансформатору напряжения через установочный автотрансформатор (УАТ) и реагирует на отклонение напряжения от уровня, заданного УАТ. ИО управляет работой силового органа.
Электромагнитный корректор напряжения осуществляет сравнение регулируемого напряжения с опорным, определяет знак отклонения и вырабатывает управляющие сигналы на изменение тока возбуждения возбудителя (регулирование по отклонению). Совместно с устройством компаундирования электромагнитный корректор поддерживает напряжение на выводах генератора по заданному закону или на заданном уровне (можно задать коэффициент статизма). Электромагнитный корректор состоит из измерительного органа (ИО) и силового органа (СО). Измерительный орган подключается к трансформатору напряжения через установочный автотрансформатор (УАТ) и реагирует на отклонение напряжения от уровня, заданного УАТ. ИО управляет работой силового органа.
 Упрощенная структурная схема электромагнитного корректора При снижении напряжения ниже заданной уставки постоянный ток в управляющих обмотках СО увеличивается и вызывает насыщение сердечника магнитного усилителя СО, при этом увеличивается Iкн.
Упрощенная структурная схема электромагнитного корректора При снижении напряжения ниже заданной уставки постоянный ток в управляющих обмотках СО увеличивается и вызывает насыщение сердечника магнитного усилителя СО, при этом увеличивается Iкн.
 Упрощенная схема электромагнитного корректора ВЛЭ – Выпрямитель линейного элемента ВНЭ – Выпрямитель нелинейного элемента
Упрощенная схема электромагнитного корректора ВЛЭ – Выпрямитель линейного элемента ВНЭ – Выпрямитель нелинейного элемента
 МУ - трехфазный магнитный усилитель, состоящий из трехфазного магнитопровода, на котором размещены силовые обмотки (СО) и управляющие обмотки. ПОС – положительная обратная связь Переменный ток, протекающий по силовым обмоткам, выпрямляется 3 -х фазным мостом и формирует ток Iкн. Величина Iкн зависит от сопротивления СО (Xсо ограничивает величину тока Iкн). Xсо зависит от состояния магнитопровода, на который намотаны эти обмотки. Если магнитопровод не насыщен, то Xсо – максимально, Iкн – минимален. Т. е. при максимальном напряжении необходимо сделать так, чтобы магнитопровод не насыщался, а при падении напряжения - намагничивать его постоянным током, этим уменьшая Xсо. В выходную цепь включают обмотку ПОС, это позволяет повысить коэффициент усиления системы в целом. Л - управляющая обмотка линейного элемента, Н – управляющая обмотка нелинейного элемента. Числа витков этих обмоток одинаковые: WЛ= WН.
МУ - трехфазный магнитный усилитель, состоящий из трехфазного магнитопровода, на котором размещены силовые обмотки (СО) и управляющие обмотки. ПОС – положительная обратная связь Переменный ток, протекающий по силовым обмоткам, выпрямляется 3 -х фазным мостом и формирует ток Iкн. Величина Iкн зависит от сопротивления СО (Xсо ограничивает величину тока Iкн). Xсо зависит от состояния магнитопровода, на который намотаны эти обмотки. Если магнитопровод не насыщен, то Xсо – максимально, Iкн – минимален. Т. е. при максимальном напряжении необходимо сделать так, чтобы магнитопровод не насыщался, а при падении напряжения - намагничивать его постоянным током, этим уменьшая Xсо. В выходную цепь включают обмотку ПОС, это позволяет повысить коэффициент усиления системы в целом. Л - управляющая обмотка линейного элемента, Н – управляющая обмотка нелинейного элемента. Числа витков этих обмоток одинаковые: WЛ= WН.
, линейного элемента и нелинейного элемента. Линейный элемент состоит") ИО состоит из ТМ (насыщающегося TV), линейного элемента и нелинейного элемента. Линейный элемент состоит из 3 -х фазного дросселя, сопротивление которого не зависит от приложенного напряжения, и выпрямителя ВЛЭ. Нелинейный элемент включает в себя трансформатор ТМ с насыщающимся сердечником, обмотки которого соединены по схеме "звезда"/разомкнутый "треугольник". К разомкнутому треугольнику подключен ВНЭ и далее – управляющая обмотка нелинейного элемента.
ИО состоит из ТМ (насыщающегося TV), линейного элемента и нелинейного элемента. Линейный элемент состоит из 3 -х фазного дросселя, сопротивление которого не зависит от приложенного напряжения, и выпрямителя ВЛЭ. Нелинейный элемент включает в себя трансформатор ТМ с насыщающимся сердечником, обмотки которого соединены по схеме "звезда"/разомкнутый "треугольник". К разомкнутому треугольнику подключен ВНЭ и далее – управляющая обмотка нелинейного элемента.
 сердечник ТМ ненасыщен и напряжение на разомкнутом") При малых значениях входного напряжения (U<< Uб) сердечник ТМ ненасыщен и напряжение на разомкнутом треугольнике равно нулю. При повышении напряжения (уже при U = Uб) сердечник ТМ насыщается, резко возрастает ток намагничивания, который носит нелинейный характер с преобладанием 3 -ей гармоники, появляются соответствующие гармоники и во вторичных напряжениях. Известно, что слагающие 3 -ей гармоники в трехфазной системе совпадают по фазе, поэтому будут суммироваться в разомкнутом "треугольнике" ТМ, аналогично слагающей нулевой последовательности основной гармоники. При дальнейшем увеличении входного напряжения слагающая 3 -ей гармоники резко возрастает, и ток НЭ становится больше тока ЛЭ. Токи в обмотке Л и ток в обмотке Н равны в точке Uб, но создают намагничивающие силы противоположного направления, следовательно, подмагничивания сердечника МУ не будет.
При малых значениях входного напряжения (U<< Uб) сердечник ТМ ненасыщен и напряжение на разомкнутом треугольнике равно нулю. При повышении напряжения (уже при U = Uб) сердечник ТМ насыщается, резко возрастает ток намагничивания, который носит нелинейный характер с преобладанием 3 -ей гармоники, появляются соответствующие гармоники и во вторичных напряжениях. Известно, что слагающие 3 -ей гармоники в трехфазной системе совпадают по фазе, поэтому будут суммироваться в разомкнутом "треугольнике" ТМ, аналогично слагающей нулевой последовательности основной гармоники. При дальнейшем увеличении входного напряжения слагающая 3 -ей гармоники резко возрастает, и ток НЭ становится больше тока ЛЭ. Токи в обмотке Л и ток в обмотке Н равны в точке Uб, но создают намагничивающие силы противоположного направления, следовательно, подмагничивания сердечника МУ не будет.
 совпадающая по") При падении напряжения Iлэ > Iнэ, => появляется суммарная намагничивающая сила (НС) совпадающая по знаку с НС в обмотке ПОС => сердечник насыщается => Xсо – уменьшается => Iкн – увеличивается. При увеличении напряжения Iлэ < Iнэ, => появляется суммарная намагничивающая сила (НС), противоположная по знаку с НС в обмотке ПОС, и сердечник МУ вновь бы намагнитился. Чтобы этого не было, ставят блокирующий диод, связывающий плюсы линейного и нелинейного элемента. При этом токи в обеих обмотках будут примерно равными и подмагничивание не будет. Рабочий участок - а – б Выходная характеристика
При падении напряжения Iлэ > Iнэ, => появляется суммарная намагничивающая сила (НС) совпадающая по знаку с НС в обмотке ПОС => сердечник насыщается => Xсо – уменьшается => Iкн – увеличивается. При увеличении напряжения Iлэ < Iнэ, => появляется суммарная намагничивающая сила (НС), противоположная по знаку с НС в обмотке ПОС, и сердечник МУ вновь бы намагнитился. Чтобы этого не было, ставят блокирующий диод, связывающий плюсы линейного и нелинейного элемента. При этом токи в обеих обмотках будут примерно равными и подмагничивание не будет. Рабочий участок - а – б Выходная характеристика
: При снижении напряжения Xсо") СО питается от TV, подключенного к напряжению генератора (которое регулируем): При снижении напряжения Xсо – уменьшается, но при этом уменьшается и Uвх. Однако ток IКН увеличивается за счет разной степени снижения сопротивления и напряжения. Однако при глубоких насыщениях степень снижения сопротивления становится меньше, чем степень снижения напряжения, и выходной ток корректора напряжения начинает уменьшаться. Это является недостатком корректора при работе в области форсировки напряжения (при глубоких снижениях напряжения). При напряжениях, превышающих базовое, данный корректор не оказывает воздействие на систему возбуждения для снижения выходного напряжения. Это односистемный корректор. Его выход (ток IКН) , как правило, подключается так, чтобы ток корректора протекал по LE 2 согласно с током IВ возбуждения возбудителя в LE 1. ЭМК с таким включением называют согласно- включенными. Но бывают ЭМК противовключенные.
СО питается от TV, подключенного к напряжению генератора (которое регулируем): При снижении напряжения Xсо – уменьшается, но при этом уменьшается и Uвх. Однако ток IКН увеличивается за счет разной степени снижения сопротивления и напряжения. Однако при глубоких насыщениях степень снижения сопротивления становится меньше, чем степень снижения напряжения, и выходной ток корректора напряжения начинает уменьшаться. Это является недостатком корректора при работе в области форсировки напряжения (при глубоких снижениях напряжения). При напряжениях, превышающих базовое, данный корректор не оказывает воздействие на систему возбуждения для снижения выходного напряжения. Это односистемный корректор. Его выход (ток IКН) , как правило, подключается так, чтобы ток корректора протекал по LE 2 согласно с током IВ возбуждения возбудителя в LE 1. ЭМК с таким включением называют согласно- включенными. Но бывают ЭМК противовключенные.
 На ГГ применяют двух системные корректоры, состоящие из двух односистемных: ЭМК-С – согласно-включенный; ЭМК-П – противовключенный. Его характеристика обеспечивает как режим форсировки при снижении напряжения, так и режим развозбуждения при повышении напряжения. Совместное исполнение компаундирования и корректора напряжения в таком исполнении называется компаундирование полным током Суммирование токов от ТА и TV осуществляется после их выпрямления, т. е. без учета н.
На ГГ применяют двух системные корректоры, состоящие из двух односистемных: ЭМК-С – согласно-включенный; ЭМК-П – противовключенный. Его характеристика обеспечивает как режим форсировки при снижении напряжения, так и режим развозбуждения при повышении напряжения. Совместное исполнение компаундирования и корректора напряжения в таком исполнении называется компаундирование полным током Суммирование токов от ТА и TV осуществляется после их выпрямления, т. е. без учета н.
 АРВ с фазовым компаундированием А В С TV
АРВ с фазовым компаундированием А В С TV
 ТПМ – Трансформатор с подмагничиванием Wт – токовая обмотка Wн – обмотка напряжения Wп – обмотка подмагничивания Вторичный ток образуется как сумма первичных токов до их выпрямления, следовательно, управляющее воздействие зависит от cos :
ТПМ – Трансформатор с подмагничиванием Wт – токовая обмотка Wн – обмотка напряжения Wп – обмотка подмагничивания Вторичный ток образуется как сумма первичных токов до их выпрямления, следовательно, управляющее воздействие зависит от cos :
 Устройство фазового компаундирования обеспечивает более точное поддержание напряжения, чем компаундирование полным током. Однако и здесь ЭДС генератора не будет строго пропорционально току статора, что приводит к отклонению UГ от заданного уровня. Поэтому устройство фазового компаундирования должно иметь орган для корректировки напряжения – электромагнитный корректор напряжения. ЭМК подмагничивает (размагничивает) сердечник ТПМ и меняет его коэффициент трансформации. При увеличении U этот Кт увеличивается. , т. к. ЭМК является устройством управления фазовым компаундированием, а весь комплект - управляемым фазовым компаундированием. РВА – 62 (Разработчик – институт электродинамики)
Устройство фазового компаундирования обеспечивает более точное поддержание напряжения, чем компаундирование полным током. Однако и здесь ЭДС генератора не будет строго пропорционально току статора, что приводит к отклонению UГ от заданного уровня. Поэтому устройство фазового компаундирования должно иметь орган для корректировки напряжения – электромагнитный корректор напряжения. ЭМК подмагничивает (размагничивает) сердечник ТПМ и меняет его коэффициент трансформации. При увеличении U этот Кт увеличивается. , т. к. ЭМК является устройством управления фазовым компаундированием, а весь комплект - управляемым фазовым компаундированием. РВА – 62 (Разработчик – институт электродинамики)
 Для ТГ единой серии ТВВ, оснащенных высокочастотными возбудителями, АРВ и ФВ осуществлялась с помощью типовых панелей автоматики: ЭПА-325 Б, 325 В, 500. Панель включает в себя АРВ, УБФ, блок ограничения форсировки возбуждения, блок ограничения минимального возбуждения, гибкую обратную связь, защиту обмотки ротора и выпрямителей от перегрузки.
Для ТГ единой серии ТВВ, оснащенных высокочастотными возбудителями, АРВ и ФВ осуществлялась с помощью типовых панелей автоматики: ЭПА-325 Б, 325 В, 500. Панель включает в себя АРВ, УБФ, блок ограничения форсировки возбуждения, блок ограничения минимального возбуждения, гибкую обратную связь, защиту обмотки ротора и выпрямителей от перегрузки.
 Назначение: Применяются для повышения устойчивости параллельной работы") Автоматические регуляторы возбуждения сильного действия (АРВ СД) Назначение: Применяются для повышения устойчивости параллельной работы генератора с энергосистемой при наличии протяженных и сильно загруженных линий связи. Кроме того, АРВ СД позволяет скомпенсировать неблагоприятное влияние на устойчивость увеличения значений Xd генераторов с непосредственным охлаждением обмоток. АРВ СД оказывает на систему возбуждения более интенсивное (сильное) воздействие, чем АРВ пропорционального действия, т. к. эти регуляторы реагируют не только на отклонение, но и на производные (и ряд др. параметров). Это дает возможность с опережением предсказывать тенденцию ПП и оказывать на систему возбуждения упреждающее воздействие. В АРВ СД различных типов используют отклонение по напряжению , производную от напряжения, первую и вторую производную тока статора.
Автоматические регуляторы возбуждения сильного действия (АРВ СД) Назначение: Применяются для повышения устойчивости параллельной работы генератора с энергосистемой при наличии протяженных и сильно загруженных линий связи. Кроме того, АРВ СД позволяет скомпенсировать неблагоприятное влияние на устойчивость увеличения значений Xd генераторов с непосредственным охлаждением обмоток. АРВ СД оказывает на систему возбуждения более интенсивное (сильное) воздействие, чем АРВ пропорционального действия, т. к. эти регуляторы реагируют не только на отклонение, но и на производные (и ряд др. параметров). Это дает возможность с опережением предсказывать тенденцию ПП и оказывать на систему возбуждения упреждающее воздействие. В АРВ СД различных типов используют отклонение по напряжению , производную от напряжения, первую и вторую производную тока статора.
 Желательно иметь управляющее воздействие непосредственно по параметру, влияющему на устойчивость параллельной работы, т. е. на и его производные. Для формирования сигнала пропорционального необходимо передать параметры вектора напряжения с противоположного конца ЛЭП, а это связанно с телемеханикой. Надежную, непрерывную передачу этой информации тяжело осуществить. Поскольку и f взаимосвязаны (f , а f ), то в последних конструкциях АРВ СД чаще используют U, U , f, f , Iрот. В своё время были разработаны типовые электромагнитные и полупроводниковые АРВ СД (ВЭИ, МЭИ), которые были установлены на гидрогенераторах Красноярской, Братской ГЭС, ТГ мощностью 300 – 800 МВт, на СШГЭС – полупроводниковые. В СЭИ разрабатывались цифровые АРВ. Сейчас в ВЭИ разработаны микропроцессорные АРВ СД. Функции АРВ СД • Изменение возбуждения по заданному алгоритму для поддержания напряжения на шинах станции или в заданной точке сети.
Желательно иметь управляющее воздействие непосредственно по параметру, влияющему на устойчивость параллельной работы, т. е. на и его производные. Для формирования сигнала пропорционального необходимо передать параметры вектора напряжения с противоположного конца ЛЭП, а это связанно с телемеханикой. Надежную, непрерывную передачу этой информации тяжело осуществить. Поскольку и f взаимосвязаны (f , а f ), то в последних конструкциях АРВ СД чаще используют U, U , f, f , Iрот. В своё время были разработаны типовые электромагнитные и полупроводниковые АРВ СД (ВЭИ, МЭИ), которые были установлены на гидрогенераторах Красноярской, Братской ГЭС, ТГ мощностью 300 – 800 МВт, на СШГЭС – полупроводниковые. В СЭИ разрабатывались цифровые АРВ. Сейчас в ВЭИ разработаны микропроцессорные АРВ СД. Функции АРВ СД • Изменение возбуждения по заданному алгоритму для поддержания напряжения на шинах станции или в заданной точке сети.
 • Форсировка возбуждения. • Ограничение тока ротора на двух кратном уровне. • Автоматическая разгрузка генератора при перегрузке по току ротора и реактивному току статора. • Изменение предписанного значения Uг при синхронизации. • Ограничение снижения возбуждения в режиме потребления реактивной мощности. • Защита от повышения напряжения. • Распределение реактивных мощностей между параллельно работающими генераторами. Достоинства АРВ СД (при использовании только производной по напряжению) иллюстрируются рисунком.
• Форсировка возбуждения. • Ограничение тока ротора на двух кратном уровне. • Автоматическая разгрузка генератора при перегрузке по току ротора и реактивному току статора. • Изменение предписанного значения Uг при синхронизации. • Ограничение снижения возбуждения в режиме потребления реактивной мощности. • Защита от повышения напряжения. • Распределение реактивных мощностей между параллельно работающими генераторами. Достоинства АРВ СД (при использовании только производной по напряжению) иллюстрируются рисунком.
 Регулирующее воздействие АРВ СД UУПР. складывается из регулирующего воздействия звена пропорционального и дифференциального: UУПР. = UРВ. П + UРВ. Д Если имеем регулятор пропорционального действия (РВП), то в точке 0 при появлении отклонения напряжения управляющего воздействия практически нет, Uрвп – минимально. Uрвп – максимально при максимальном отклонении напряжения (при Uнб - max). После 1 вследствие инерционности происходит перерегулирование.
Регулирующее воздействие АРВ СД UУПР. складывается из регулирующего воздействия звена пропорционального и дифференциального: UУПР. = UРВ. П + UРВ. Д Если имеем регулятор пропорционального действия (РВП), то в точке 0 при появлении отклонения напряжения управляющего воздействия практически нет, Uрвп – минимально. Uрвп – максимально при максимальном отклонении напряжения (при Uнб - max). После 1 вследствие инерционности происходит перерегулирование.
 и") При использовании производной процесс восстановления напряжения протекает быстрее (tр. с.
При использовании производной процесс восстановления напряжения протекает быстрее (tр. с.
 Лучше всего было бы формировать регулирующее воздействие по основному закону, от которого зависит статическая и динамическая устойчивость и результирующая устойчивость электропередачи – т. е. по . О сложности и ненадежности передачи телеинформации о векторе UС уже говорилось… Поэтому в алгоритм вводят: UГ – отклонение амплитуды или действующего значения UГ от предписанного Uпр. ; U Г =d. UГ/dt – производная по напряжению; f d /dt – изменение частоты; f = df/dt d 2 /dt 2 – первая производная частоты; I в = d. Iв/dt – производная по току возбуждения. UГ – необходимо для обеспечения практически постоянного (с точностью статической погрешности напряжения UГ или напряжения в начале линии (на шинах ВН): UЛ = UГ - j. IГ·ХТ const, формируется на выходе регулятора моделированием j. IГ·ХТ. U Г – обеспечивает демпфирование колебаний напряжения, стабилизирует автоматическую систему регулирования возбуждения на холостом ходу.
Лучше всего было бы формировать регулирующее воздействие по основному закону, от которого зависит статическая и динамическая устойчивость и результирующая устойчивость электропередачи – т. е. по . О сложности и ненадежности передачи телеинформации о векторе UС уже говорилось… Поэтому в алгоритм вводят: UГ – отклонение амплитуды или действующего значения UГ от предписанного Uпр. ; U Г =d. UГ/dt – производная по напряжению; f d /dt – изменение частоты; f = df/dt d 2 /dt 2 – первая производная частоты; I в = d. Iв/dt – производная по току возбуждения. UГ – необходимо для обеспечения практически постоянного (с точностью статической погрешности напряжения UГ или напряжения в начале линии (на шинах ВН): UЛ = UГ - j. IГ·ХТ const, формируется на выходе регулятора моделированием j. IГ·ХТ. U Г – обеспечивает демпфирование колебаний напряжения, стабилизирует автоматическую систему регулирования возбуждения на холостом ходу.
 – повышают устойчивость замкнутой") Сигналы по f, f , I в (т. е. ЕГ) – повышают устойчивость замкнутой автоматической системы регулирования, включающей нагруженную ВЛ, обеспечивают затухание электромеханических переходных процессов, повышают статическую и динамическую устойчивость параллельной работы Эл. Ст и ЭЭС. Таким образом: Uрег. = КU· U + К u. U + Кf · f + К f ·f + K I ·I В Или в операторном виде: f = f. C – f. Г - отклонение частоты от синхронной, К – коэффициенты с размерностью постоянной времени. Из выражения видно, что f формируется реальным дифференцирующим звеном с относительно большой постоянной времени ТДР. Этот сигнал существует только в переходном процессе отклонения частоты. В установившемся режиме при наличии f сигнал f =0.
Сигналы по f, f , I в (т. е. ЕГ) – повышают устойчивость замкнутой автоматической системы регулирования, включающей нагруженную ВЛ, обеспечивают затухание электромеханических переходных процессов, повышают статическую и динамическую устойчивость параллельной работы Эл. Ст и ЭЭС. Таким образом: Uрег. = КU· U + К u. U + Кf · f + К f ·f + K I ·I В Или в операторном виде: f = f. C – f. Г - отклонение частоты от синхронной, К – коэффициенты с размерностью постоянной времени. Из выражения видно, что f формируется реальным дифференцирующим звеном с относительно большой постоянной времени ТДР. Этот сигнал существует только в переходном процессе отклонения частоты. В установившемся режиме при наличии f сигнал f =0.
 В соответствии с этим выражением определяется структурная схема путем параллельного соединения соответствующих структурных звеньев. Структурная схема АРВ СД
В соответствии с этим выражением определяется структурная схема путем параллельного соединения соответствующих структурных звеньев. Структурная схема АРВ СД
 • Безынерционное звено с коэффициентом усиления КU. • Идеальные дифференцирующие звенья с передаточными функциями р. К U , р. К f , р. К I. • Реальное дифференцирующее звено с передаточной функцией W(p) = p. Kf /(p. TДР +1) • Безынерционный сумматор AW. • Апериодическое звено с передаточной функцией W(P) = 1 /(p. Tу +1) отображает исполнительный усилитель автоматического регулятора. Регулируемый объект – синхронный генератор с возбудителем в структурной схеме представлен двумя последовательно соединенными апериодическими звеньями W(P) = 1 /(p. Tе +1) (Те – постоянная времени возбудителя) и синхронного генератора W(P) = 1 /(p. T d 0 +1), В реальной схеме АРВ СД все звенья инерционны, однако их постоянные времени несоизмеримы. Так у звеньев, близких к идеальным, и реальным TДР 10 ТДИ.
• Безынерционное звено с коэффициентом усиления КU. • Идеальные дифференцирующие звенья с передаточными функциями р. К U , р. К f , р. К I. • Реальное дифференцирующее звено с передаточной функцией W(p) = p. Kf /(p. TДР +1) • Безынерционный сумматор AW. • Апериодическое звено с передаточной функцией W(P) = 1 /(p. Tу +1) отображает исполнительный усилитель автоматического регулятора. Регулируемый объект – синхронный генератор с возбудителем в структурной схеме представлен двумя последовательно соединенными апериодическими звеньями W(P) = 1 /(p. Tе +1) (Те – постоянная времени возбудителя) и синхронного генератора W(P) = 1 /(p. T d 0 +1), В реальной схеме АРВ СД все звенья инерционны, однако их постоянные времени несоизмеримы. Так у звеньев, близких к идеальным, и реальным TДР 10 ТДИ.
 Функциональная схема АРВ СД
Функциональная схема АРВ СД
 Функциональная схема АРВ СД состоит из двух основных частей: • Измерительная часть; • Исполнительная часть. Особенностью схемы является наличие логической части, координирующей использование сигналов по производным режимных параметров. ИОР и АТ – измерительный орган реактивного и активного тока ИОТР – измерительный орган тока ротора У – усилитель ИОУ (ИОН, ИОЧ) – измерительный орган угла (напряжения, частоты) ЭИУ – элемент изменения уставки УРРН – устройство распределения реактивной нагрузки ИОУ используется при работе генератора на х. х. для синхронизации (Формирует U линейно зависящий от ) ИОН формирует сигнал пропорциональный разности между Uг и предписанным напряжением (Uпр). Этот сигнал разнополярный. Uпр задает ЭИУ
Функциональная схема АРВ СД состоит из двух основных частей: • Измерительная часть; • Исполнительная часть. Особенностью схемы является наличие логической части, координирующей использование сигналов по производным режимных параметров. ИОР и АТ – измерительный орган реактивного и активного тока ИОТР – измерительный орган тока ротора У – усилитель ИОУ (ИОН, ИОЧ) – измерительный орган угла (напряжения, частоты) ЭИУ – элемент изменения уставки УРРН – устройство распределения реактивной нагрузки ИОУ используется при работе генератора на х. х. для синхронизации (Формирует U линейно зависящий от ) ИОН формирует сигнал пропорциональный разности между Uг и предписанным напряжением (Uпр). Этот сигнал разнополярный. Uпр задает ЭИУ
 ИОЧ формирует напряжения или токи пропорциональные , Исполнительная часть состоит из двух частей: А 1 – формирует управляющие сигналы для рабочей группы вентилей. А 2 – формирует управляющие сигналы для форсировочной группы вентилей. ИОТР - формирует IР, I Р =d. IP/dt d. EГ/dt , интегральную функцию по отклонению тока ротора Это необходимо для поддержания тока возбуждения на неизменном уровне в режиме выбега СГ атомных станций (это может быть связанно по технологическим условиям останова агрегата на атомных станциях), для разгрузки генератора при его перегрузки по реактивной мощности (по тепловому импульсу). ИОТР вырабатывает сигнал по ограничению тока ротора на 2 -х кратном уровне при форсировке возбуждения.
ИОЧ формирует напряжения или токи пропорциональные , Исполнительная часть состоит из двух частей: А 1 – формирует управляющие сигналы для рабочей группы вентилей. А 2 – формирует управляющие сигналы для форсировочной группы вентилей. ИОТР - формирует IР, I Р =d. IP/dt d. EГ/dt , интегральную функцию по отклонению тока ротора Это необходимо для поддержания тока возбуждения на неизменном уровне в режиме выбега СГ атомных станций (это может быть связанно по технологическим условиям останова агрегата на атомных станциях), для разгрузки генератора при его перегрузки по реактивной мощности (по тепловому импульсу). ИОТР вырабатывает сигнал по ограничению тока ротора на 2 -х кратном уровне при форсировке возбуждения.
 Измерительная часть содержит активный сумматор AW, который воздействует на исполнительный усилитель (или два – при двух тиристорных преобразователях). Виды исполнения АРВ СД 1. Электромагнитные АРВ СД (СО, ИО на магнитных усилителях). 2. Полупроводниковые АРВ СДП. 3. Гибридные аналого-цифровые АРВ СД для ТГ с бесщеточным возбуждением. 4. Цифровые АРВ СДМ (АРВ СД микропроцессорные). Особенности выполнения ИО При построении измерительного органа учитывается особенность АРВ СД – их быстродействие. Выходные сигналы ИО аналоговых АРВ – это напряжения постоянного тока, изменяющиеся пропорционально U, U', 'f, Р, Q, IР. Это означает, что для их получения из переменного тока (напряжения) необходимо выпрямить, отфильтровать. А фильтры инерционны.
Измерительная часть содержит активный сумматор AW, который воздействует на исполнительный усилитель (или два – при двух тиристорных преобразователях). Виды исполнения АРВ СД 1. Электромагнитные АРВ СД (СО, ИО на магнитных усилителях). 2. Полупроводниковые АРВ СДП. 3. Гибридные аналого-цифровые АРВ СД для ТГ с бесщеточным возбуждением. 4. Цифровые АРВ СДМ (АРВ СД микропроцессорные). Особенности выполнения ИО При построении измерительного органа учитывается особенность АРВ СД – их быстродействие. Выходные сигналы ИО аналоговых АРВ – это напряжения постоянного тока, изменяющиеся пропорционально U, U', 'f, Р, Q, IР. Это означает, что для их получения из переменного тока (напряжения) необходимо выпрямить, отфильтровать. А фильтры инерционны.
 Поэтому для повышения быстродействия используют трехфазные выпрямители с малоинерционными частотными фильтрами. Примеры. С А ИОН сравнивает напряжение в начале линии (на шинах) с предписанным значением: U U = КП(UПР. – UЛ), КП- коэффициент передачи элемента изменения уставки. Входное напряжение 3 -х фазного ВМ создается с учетом токовой компенсации падения напряжения на сопротивлении трансформатора блока UТ. В фазе А и С добавляется (вычитается) сигнал, пропорциональный току в этой фазе.
Поэтому для повышения быстродействия используют трехфазные выпрямители с малоинерционными частотными фильтрами. Примеры. С А ИОН сравнивает напряжение в начале линии (на шинах) с предписанным значением: U U = КП(UПР. – UЛ), КП- коэффициент передачи элемента изменения уставки. Входное напряжение 3 -х фазного ВМ создается с учетом токовой компенсации падения напряжения на сопротивлении трансформатора блока UТ. В фазе А и С добавляется (вычитается) сигнал, пропорциональный току в этой фазе.
 С ростом тока статора будет уменьшаться напряжение на входе моста. ИО почувствует и отреагирует на падение напряжения. Причем, при индуктивной нагрузке ( = 900) UBC. Л=UВС. Г – IA. Р·RA, т. е. вычитается арифметически. Точно так же вычитается из фазного напряжения падение реактивного тока на индуктивном сопротивлении трансформатора.
С ростом тока статора будет уменьшаться напряжение на входе моста. ИО почувствует и отреагирует на падение напряжения. Причем, при индуктивной нагрузке ( = 900) UBC. Л=UВС. Г – IA. Р·RA, т. е. вычитается арифметически. Точно так же вычитается из фазного напряжения падение реактивного тока на индуктивном сопротивлении трансформатора.
 ИОЧ Измерительный орган отклонения частоты сравнивает абсолютные значения токов, которые являются разными функциями частоты. Содержит 2 контура с резонансными частотами f 01=45 Гц и f 02=55 Гц. Микропроцессорный регулятор возбуждения сильного действия АРВ СДМ разработан в ВЭИ для ТГ и ГГ (вместо аналогичных аппаратного типа). Позволяет усовершенствовать регуляторы путем усложнения алгоритмов управления, увеличить объем выполняемых функций, точность регулирования. АРВ СДМ позволяет создать адаптивные системы управления, перестраивающиеся при изменении условий работы генератора в энергосистеме.
ИОЧ Измерительный орган отклонения частоты сравнивает абсолютные значения токов, которые являются разными функциями частоты. Содержит 2 контура с резонансными частотами f 01=45 Гц и f 02=55 Гц. Микропроцессорный регулятор возбуждения сильного действия АРВ СДМ разработан в ВЭИ для ТГ и ГГ (вместо аналогичных аппаратного типа). Позволяет усовершенствовать регуляторы путем усложнения алгоритмов управления, увеличить объем выполняемых функций, точность регулирования. АРВ СДМ позволяет создать адаптивные системы управления, перестраивающиеся при изменении условий работы генератора в энергосистеме.
 Основные функции: - поддержание напряжения генератора с заданным статизмом; - обеспечение максимальных пределов статической и динамической устойчивости электропередачи; - улучшение демпфирования послеаварийных качаний за счет сильного регулирования; - ограничение режимных параметров с высокой точностью и быстродействием; - подгонка уставки АРВ по напряжению при ТАС; - разгрузка генератора по реактивной мощности при его отключении; - индикация состояния системы регулирования возбуждения и настроечных параметров регулятора, сигнализация неисправностей, диагностика отказов. АРВ СДМ имеет лучшие характеристики и функциональные возможности, кроме того, позволяет уменьшить объем специализированной аппаратуры и упростить её за счет использования серийных устройств, сокращается время наладки.
Основные функции: - поддержание напряжения генератора с заданным статизмом; - обеспечение максимальных пределов статической и динамической устойчивости электропередачи; - улучшение демпфирования послеаварийных качаний за счет сильного регулирования; - ограничение режимных параметров с высокой точностью и быстродействием; - подгонка уставки АРВ по напряжению при ТАС; - разгрузка генератора по реактивной мощности при его отключении; - индикация состояния системы регулирования возбуждения и настроечных параметров регулятора, сигнализация неисправностей, диагностика отказов. АРВ СДМ имеет лучшие характеристики и функциональные возможности, кроме того, позволяет уменьшить объем специализированной аппаратуры и упростить её за счет использования серийных устройств, сокращается время наладки.
 Модификацию алгоритмов и объём выполняемых функций в конкретных условиях можно изменить без переработки аппаратуры, только путем изменения программы. Повышается надежность за счет снижения числа компонентов и их соединений, резервирования и самодиагностики. Структурная схема технических средств АРВ СДМ
Модификацию алгоритмов и объём выполняемых функций в конкретных условиях можно изменить без переработки аппаратуры, только путем изменения программы. Повышается надежность за счет снижения числа компонентов и их соединений, резервирования и самодиагностики. Структурная схема технических средств АРВ СДМ
 БКМ – блок коммутации выходных логических и аналоговых сигналов; УВК – управляющий вычислительный комплекс; УСО – устройство связи с объектом; СП – система питания; ПКУ – пульт контроля и управления; БК – блок контроля. В состав УВК входят 2 микро-ЭВМ (с ОЗУ 32 к. Б, ППЗУ 32 к. Б, модули ввода/вывода, параллельный и последовательный интерфейс, АЦП, ЦАП и др. ). Одна ЭВМ является рабочей, другая – в горячем резерве. Регулятор имеет развитую систему программного контроля микро-ЭВМ, УСО, СП. Информация о неисправности ЭВМ и других блоков накапливается в БК. В БК формируются сигналы неисправности, поступающие на входы БКМ, а так же сигналы о неисправности УСО. В зависимости от характера неисправности производится либо перевод управления на резервную ЭВМ, либо – отключение АРВ. В состав входного УСО входят блоки ввода и обработки аналоговых сигналов от TV и TA, дискретных логических сигналов.
БКМ – блок коммутации выходных логических и аналоговых сигналов; УВК – управляющий вычислительный комплекс; УСО – устройство связи с объектом; СП – система питания; ПКУ – пульт контроля и управления; БК – блок контроля. В состав УВК входят 2 микро-ЭВМ (с ОЗУ 32 к. Б, ППЗУ 32 к. Б, модули ввода/вывода, параллельный и последовательный интерфейс, АЦП, ЦАП и др. ). Одна ЭВМ является рабочей, другая – в горячем резерве. Регулятор имеет развитую систему программного контроля микро-ЭВМ, УСО, СП. Информация о неисправности ЭВМ и других блоков накапливается в БК. В БК формируются сигналы неисправности, поступающие на входы БКМ, а так же сигналы о неисправности УСО. В зависимости от характера неисправности производится либо перевод управления на резервную ЭВМ, либо – отключение АРВ. В состав входного УСО входят блоки ввода и обработки аналоговых сигналов от TV и TA, дискретных логических сигналов.
 Выходное УСО содержит блоки выходных дискретных сигналов на базе герконов и блоки вывода управляющих аналоговых сигналов, обеспечивающих усиление и гальваническую развязку сигналов регулятора. СП – обеспечивает гарантированное питание всего комплекса от сети переменного и постоянного напряжения. ПКУ – позволяет задавать режим и контролировать работу регулятора, корректировать уставки. Закон регулирования принят тем же, расширены лишь диапазоны изменения коэффициентов регулирования. Комплект программного обеспечения является системой реального времени и включает в себя программу начального пуска, программу "Диспетчер", программу измерения режимных параметров, обработки сбоев, контроля исправности регулятора, связи с оператором через ПКУ и др.
Выходное УСО содержит блоки выходных дискретных сигналов на базе герконов и блоки вывода управляющих аналоговых сигналов, обеспечивающих усиление и гальваническую развязку сигналов регулятора. СП – обеспечивает гарантированное питание всего комплекса от сети переменного и постоянного напряжения. ПКУ – позволяет задавать режим и контролировать работу регулятора, корректировать уставки. Закон регулирования принят тем же, расширены лишь диапазоны изменения коэффициентов регулирования. Комплект программного обеспечения является системой реального времени и включает в себя программу начального пуска, программу "Диспетчер", программу измерения режимных параметров, обработки сбоев, контроля исправности регулятора, связи с оператором через ПКУ и др.
 Автоматическое регулирование напряжения и реактивной мощности в электрических системах Задачи АРН в ЭЭС: 1. Обеспечение оптимального режима по напряжению и реактивной мощности в процессе производства, передачи и распределения электроэнергии. 2. Обеспечение качества электроэнергии у потребителя. Оптимальный режим определяется минимумом суммарных потерь электроэнергии (главным образом – при передаче). Их минимум будет при оптимальных уровнях напряжения в узловых точках электрической системы и соответствующем распределении реактивной мощности по ВЛ питающих сетей. Режим по напряжению и "Q" распределительных сетей связан с выполнением второй задачи – поддержание заданного уровня напряжения: U* = 0, 05. В частных случаях на зажимах ЭД U* = - 0, 05 – 0, 1 и дополнительно в послеаварийных режимах ещё 0, 05. АРН и РМ может осуществляться:
Автоматическое регулирование напряжения и реактивной мощности в электрических системах Задачи АРН в ЭЭС: 1. Обеспечение оптимального режима по напряжению и реактивной мощности в процессе производства, передачи и распределения электроэнергии. 2. Обеспечение качества электроэнергии у потребителя. Оптимальный режим определяется минимумом суммарных потерь электроэнергии (главным образом – при передаче). Их минимум будет при оптимальных уровнях напряжения в узловых точках электрической системы и соответствующем распределении реактивной мощности по ВЛ питающих сетей. Режим по напряжению и "Q" распределительных сетей связан с выполнением второй задачи – поддержание заданного уровня напряжения: U* = 0, 05. В частных случаях на зажимах ЭД U* = - 0, 05 – 0, 1 и дополнительно в послеаварийных режимах ещё 0, 05. АРН и РМ может осуществляться:
. 2. АРВ синхронных компенсаторов") 1. АРВ синхронных генераторов электростанций (регулирование напряжения на шинах станции). 2. АРВ синхронных компенсаторов и синхронных двигателей. 3. Регулирование реактивной мощности с помощью управляемых статических источников реактивной мощности (конденсаторные батареи). 4. Автоматическое регулирование коэффициента трансформации трансформаторов, имеющих РПН. Регулирование напряжения может осуществляться: По астатической характеристике, когда напряжение не зависит от тока статора генератора, такую характеристику имеют АРВ, реагирующие на отклонение напряжения и не зависящие от изменения тока (корректор напряжения). Есть естественный статизм, и снижение напряжения все равно будет.
1. АРВ синхронных генераторов электростанций (регулирование напряжения на шинах станции). 2. АРВ синхронных компенсаторов и синхронных двигателей. 3. Регулирование реактивной мощности с помощью управляемых статических источников реактивной мощности (конденсаторные батареи). 4. Автоматическое регулирование коэффициента трансформации трансформаторов, имеющих РПН. Регулирование напряжения может осуществляться: По астатической характеристике, когда напряжение не зависит от тока статора генератора, такую характеристику имеют АРВ, реагирующие на отклонение напряжения и не зависящие от изменения тока (корректор напряжения). Есть естественный статизм, и снижение напряжения все равно будет.
 Закон регулирования со статизмом Регулятору в качестве входной величины необходимо задать ток статора, т. е. соответствующее приращение тока статора должно соответствовать изменению напряжения на выводах генератора. Это приращение характеризуется коэффициентом статизма При астатической характеристике регулирования хорошо то, что напряжение постоянно (не зависит от тока). Но при таком законе регулирования в случае параллельной работы генератора возникает неопределенность в распределение реактивных мощностей.
Закон регулирования со статизмом Регулятору в качестве входной величины необходимо задать ток статора, т. е. соответствующее приращение тока статора должно соответствовать изменению напряжения на выводах генератора. Это приращение характеризуется коэффициентом статизма При астатической характеристике регулирования хорошо то, что напряжение постоянно (не зависит от тока). Но при таком законе регулирования в случае параллельной работы генератора возникает неопределенность в распределение реактивных мощностей.
, и если у первого ИО оказался более") При возникновении дефицита мощности напряжение снижается (------), и если у первого ИО оказался более чувствительным и быстродействующим, то всякое отклонение он будет воспринимать первым и покрывать этот дефицит. Если этого приращения реактивной мощности оказалось достаточно для восстановления первоначального напряжения, то второй генератор останется с прежней нагрузкой. Таким образом, распределение реактивной мощности между параллельно работающими генераторами будет совершенно произвольным.
При возникновении дефицита мощности напряжение снижается (------), и если у первого ИО оказался более чувствительным и быстродействующим, то всякое отклонение он будет воспринимать первым и покрывать этот дефицит. Если этого приращения реактивной мощности оказалось достаточно для восстановления первоначального напряжения, то второй генератор останется с прежней нагрузкой. Таким образом, распределение реактивной мощности между параллельно работающими генераторами будет совершенно произвольным.
 При статической характеристике, если два агрегата имеют одинаковый коэффициент статизма, то каждый из агрегатов получает одинаковую загрузку при дефиците мощности. При различных коэффициентах статизма: Uнр – напряжение при номинальной реактивной нагрузке.
При статической характеристике, если два агрегата имеют одинаковый коэффициент статизма, то каждый из агрегатов получает одинаковую загрузку при дефиците мощности. При различных коэффициентах статизма: Uнр – напряжение при номинальной реактивной нагрузке.
 Реактивная нагрузка распределяется обратно пропорционально коэффициенту статизма. Так как эти отношения справедливы для любого числа параллельно работающих генераторов, то суммарная реактивная мощность: Таким образом, в этом случае имеет место строго определенное распределение Q между параллельно работающими агрегатами. Однако при статическом регулировании не обеспечивается требование поддержания напряжения в заданной точке на неизменном уровне, например, на шинах станции или у потребителя. Удовлетворить обоим требованиям можно при групповом автоматическом управлении возбуждением.
Реактивная нагрузка распределяется обратно пропорционально коэффициенту статизма. Так как эти отношения справедливы для любого числа параллельно работающих генераторов, то суммарная реактивная мощность: Таким образом, в этом случае имеет место строго определенное распределение Q между параллельно работающими агрегатами. Однако при статическом регулировании не обеспечивается требование поддержания напряжения в заданной точке на неизменном уровне, например, на шинах станции или у потребителя. Удовлетворить обоим требованиям можно при групповом автоматическом управлении возбуждением.
 Задание статизма по реактивному току генератора АРВ настроен астатически. Чтобы обеспечить статизм необходимо ввести информацию о токе. Для этого в цепь TV, от которого питается АРВ, включается R, к которому подводится ток фазы А. Полярность IAP·R совпадает с напряжением UBC. Падение напряжения на R от активной составляющей тока только поворачивает вектор входного напряжения, существенно не влияя на модуль. => Увеличение Uвх. АРВ воспринимается как повышение напряжения генератора…
Задание статизма по реактивному току генератора АРВ настроен астатически. Чтобы обеспечить статизм необходимо ввести информацию о токе. Для этого в цепь TV, от которого питается АРВ, включается R, к которому подводится ток фазы А. Полярность IAP·R совпадает с напряжением UBC. Падение напряжения на R от активной составляющей тока только поворачивает вектор входного напряжения, существенно не влияя на модуль. => Увеличение Uвх. АРВ воспринимается как повышение напряжения генератора…
 Работа генератора в блоке с трансформатором Для обеспечения неизменности напряжения на шинах ВН можно использовать эту же схему, но только изменить знак (задать отрицательный коэффициент статизма на шинах генераторного напряжения). К АРВ также подводится Uг. Напряжение на шинах ВН: т. е. снижается при увеличении реактивного тока. Если принять Rк = Xт, то
Работа генератора в блоке с трансформатором Для обеспечения неизменности напряжения на шинах ВН можно использовать эту же схему, но только изменить знак (задать отрицательный коэффициент статизма на шинах генераторного напряжения). К АРВ также подводится Uг. Напряжение на шинах ВН: т. е. снижается при увеличении реактивного тока. Если принять Rк = Xт, то
 При увеличении ток нагрузки блока Uвх АРВ уменьшается, АРВ это воспринимает как снижение напряжения на генераторном напряжении и увеличивает ток возбуждения, компенсируя падение напряжения на сопротивлении трансформатора.
При увеличении ток нагрузки блока Uвх АРВ уменьшается, АРВ это воспринимает как снижение напряжения на генераторном напряжении и увеличивает ток возбуждения, компенсируя падение напряжения на сопротивлении трансформатора.
 Параллельная работа блоков на общие шины Система питания АРВ аналогична. Вход АРВ – Uг Если АРВ поддерживает на генераторах равные напряжения Uг 1 = Uг 2, то: ; Реактивная мощность при параллельной работе распределяется обратно пропорционально сопротивлениям блочных трансформаторов. ВЫВОД: При параллельной работе агрегатов на шинах ВН с АРВ, имеющими астатически настроенные регуляторы на генераторном напряжении, обеспечивается определенное распределение реактивной нагрузки и дополнительных средств стабилизации режима по реактивной мощности не требуется.
Параллельная работа блоков на общие шины Система питания АРВ аналогична. Вход АРВ – Uг Если АРВ поддерживает на генераторах равные напряжения Uг 1 = Uг 2, то: ; Реактивная мощность при параллельной работе распределяется обратно пропорционально сопротивлениям блочных трансформаторов. ВЫВОД: При параллельной работе агрегатов на шинах ВН с АРВ, имеющими астатически настроенные регуляторы на генераторном напряжении, обеспечивается определенное распределение реактивной нагрузки и дополнительных средств стабилизации режима по реактивной мощности не требуется.
 Для того чтобы изменить режим работы станции по напряжению,") Групповое управление возбуждением генераторов (ГУВ) Для того чтобы изменить режим работы станции по напряжению, необходимо изменить уставку АРВ одновременно на всех генераторах. На полностью автоматизированных ГЭС это может осуществляться путем телеуправления установочными реостатами (УР) или установочными автотрансформаторами (УАТ) всех АРВ с диспетчерского пункта Для облегчения работы оперативного персонала и повышения качества регулирования на полностью автоматизированных ГЭС используются устройства группового управления возбуждением генераторов. Для обеспечения устойчивого и определенного распределения Q между параллельно работающими генераторами характеристика регулирования напряжения в точке соединения генераторов должна иметь положительный статизм по собственному току (при отсутствии специальных схем уравнивания реактивных нагрузок агрегатов). Но при этом не обеспечивается качество электроэнергии. Для этого используют метод "встречного регулирования напряжения".
Групповое управление возбуждением генераторов (ГУВ) Для того чтобы изменить режим работы станции по напряжению, необходимо изменить уставку АРВ одновременно на всех генераторах. На полностью автоматизированных ГЭС это может осуществляться путем телеуправления установочными реостатами (УР) или установочными автотрансформаторами (УАТ) всех АРВ с диспетчерского пункта Для облегчения работы оперативного персонала и повышения качества регулирования на полностью автоматизированных ГЭС используются устройства группового управления возбуждением генераторов. Для обеспечения устойчивого и определенного распределения Q между параллельно работающими генераторами характеристика регулирования напряжения в точке соединения генераторов должна иметь положительный статизм по собственному току (при отсутствии специальных схем уравнивания реактивных нагрузок агрегатов). Но при этом не обеспечивается качество электроэнергии. Для этого используют метод "встречного регулирования напряжения".
 Для автоматического увеличения напряжения в точке соединения генераторов в ИО АРВ (регулятора по отклонению напряжения) вводится сигнал по суммарному току включенных параллельно агрегатов (т. е. осуществляется компаундирование измерительных органов напряжения). Для обеспечения такого закона поддержания напряжения и распределения реактивной мощности и используется ГУВ генераторов. ДОСТОИНСТВА ГУВ: • Возможность изменения напряжения путем воздействия на один регулятор, а не на каждый в отдельности. • Возможность настройки общего регулятора с отрицательным коэффициентом статизма по суммарному току шин (обеспечивается методом встречного регулирования). • Устранение в ПП взаимных качаний, возникающих при использовании индивидуальных АРВ.
Для автоматического увеличения напряжения в точке соединения генераторов в ИО АРВ (регулятора по отклонению напряжения) вводится сигнал по суммарному току включенных параллельно агрегатов (т. е. осуществляется компаундирование измерительных органов напряжения). Для обеспечения такого закона поддержания напряжения и распределения реактивной мощности и используется ГУВ генераторов. ДОСТОИНСТВА ГУВ: • Возможность изменения напряжения путем воздействия на один регулятор, а не на каждый в отдельности. • Возможность настройки общего регулятора с отрицательным коэффициентом статизма по суммарному току шин (обеспечивается методом встречного регулирования). • Устранение в ПП взаимных качаний, возникающих при использовании индивидуальных АРВ.
.") При выполнении ГУВ общим является измерительный орган напряжения или элемент этого органа (нелинейный элемент). В остальном используется индивидуальные АРВ. Если устройства ГУВ используются на многоагрегатных ЭС для одновременного изменения уставок индивидуальных АРВ, то возможно применение 2 -х вариантов схем.
При выполнении ГУВ общим является измерительный орган напряжения или элемент этого органа (нелинейный элемент). В остальном используется индивидуальные АРВ. Если устройства ГУВ используются на многоагрегатных ЭС для одновременного изменения уставок индивидуальных АРВ, то возможно применение 2 -х вариантов схем.
 Уставки всех индивидуальных регуляторов изменяются синхронно ключом SA с помощью реверсивного двигателя М, на валу которого укреплены движки установочных реостатов RRS. По второму варианту изменение уставок обеспечивается введением дополнительной ЭДС от вспомогательных трансформаторов TL, которые питаются от одного общего установочного трансформатора TS.
Уставки всех индивидуальных регуляторов изменяются синхронно ключом SA с помощью реверсивного двигателя М, на валу которого укреплены движки установочных реостатов RRS. По второму варианту изменение уставок обеспечивается введением дополнительной ЭДС от вспомогательных трансформаторов TL, которые питаются от одного общего установочного трансформатора TS.
 Другой, принципиально отличный способ регулирования напряжения – применение центрального АРВ. На каждом генераторе устанавливаются индивидуальные устройства компаундирования и УБФ. А регулирование напряжения производится общим центральным устройством ОРВ через индивидуальные исполнительные органы. Распределение реактивных нагрузок между генераторами осуществляется за счет статизма внешних характеристик генераторов (коэффициент статизма может меняться переменным резистором RRS). По мере роста реактивной нагрузки станции напряжение генераторов снижается.
Другой, принципиально отличный способ регулирования напряжения – применение центрального АРВ. На каждом генераторе устанавливаются индивидуальные устройства компаундирования и УБФ. А регулирование напряжения производится общим центральным устройством ОРВ через индивидуальные исполнительные органы. Распределение реактивных нагрузок между генераторами осуществляется за счет статизма внешних характеристик генераторов (коэффициент статизма может меняться переменным резистором RRS). По мере роста реактивной нагрузки станции напряжение генераторов снижается.
 Для восстановления напряжения характеристика смещается вверх на Uдоб. , т. е. изменяется уставка от Uг. х. 1 до Uг. х. 2. Одновременное изменение уставок от центрального установочного трансформатора TS и промежуточных трансформаторов TL производится путем формирования Uдоб, которое вычитается (или суммируется) из суммы напряжений на входе исполнительных органов АРВ: Uвх. = UГ + IГХСТ - Uдоб.
Для восстановления напряжения характеристика смещается вверх на Uдоб. , т. е. изменяется уставка от Uг. х. 1 до Uг. х. 2. Одновременное изменение уставок от центрального установочного трансформатора TS и промежуточных трансформаторов TL производится путем формирования Uдоб, которое вычитается (или суммируется) из суммы напряжений на входе исполнительных органов АРВ: Uвх. = UГ + IГХСТ - Uдоб.
 астатического регулятора,") Если при этом коэффициент трансформации TS изменять автоматически при помощи одного (центрального) астатического регулятора, то можно поддерживать постоянство напряжения и иметь определенность в распределении реактивных нагрузок.
Если при этом коэффициент трансформации TS изменять автоматически при помощи одного (центрального) астатического регулятора, то можно поддерживать постоянство напряжения и иметь определенность в распределении реактивных нагрузок.
 Существует две разновидности ГУВ: • С центральным распределителем реактивных нагрузок • ГУВ со схемами уравнивания реактивных нагрузок, образующих поперечные связи между генераторами и основанные на принципе мнимого статизма. В качестве параметра, характеризующего реактивный ток статора может использоваться: • Реактивная мощность статора (Q) • Реактивная составляющая тока статора • Полный ток статора • Напряжение ротора • Ток ротора ГУВ с центральным распределителем реактивных нагрузок Структурная схема
Существует две разновидности ГУВ: • С центральным распределителем реактивных нагрузок • ГУВ со схемами уравнивания реактивных нагрузок, образующих поперечные связи между генераторами и основанные на принципе мнимого статизма. В качестве параметра, характеризующего реактивный ток статора может использоваться: • Реактивная мощность статора (Q) • Реактивная составляющая тока статора • Полный ток статора • Напряжение ротора • Ток ротора ГУВ с центральным распределителем реактивных нагрузок Структурная схема
 Iрег. U ИП – Измерительный преобразователь ИЭ – Исполнительный элемент индивидуальных регуляторов УУ – Установочное устройство (для задания уставок всем агрегатам) ОРВ – Общий регулятор возбуждения
Iрег. U ИП – Измерительный преобразователь ИЭ – Исполнительный элемент индивидуальных регуляторов УУ – Установочное устройство (для задания уставок всем агрегатам) ОРВ – Общий регулятор возбуждения
 РРН – Распределитель реактивных нагрузок (распределяет реактивную мощность по каждому агрегату - каждый агрегат дает свою предписанную мощность). Если предписанное значение не изменилось, а изменилось реальное (R 1), то возникнет разница между фактическим значением (R 1) и предписанным (уставка) и возникнет - управляющее воздействие на систему возбуждения. В действительности в схеме с УРРН регулирующее воздействие Iрег. на возбудитель генератора представляет сумму воздействий: Iрег. U = Uпр. – Ui – пропорциональное отклонению напряжения от предписанного значения; Iрег. Q = Qпр. – Qi – пропорциональное разности предписанного и истинного значения реактивной мощности. При равенстве Qпр = Qi автоматическая система работает только по U. Это замкнутая система регулирования (истинное значение Q сравнивается с предписанным значением). Есть разомкнутые системы – задается предписанное значение Q - без измерения истинной мощности.
РРН – Распределитель реактивных нагрузок (распределяет реактивную мощность по каждому агрегату - каждый агрегат дает свою предписанную мощность). Если предписанное значение не изменилось, а изменилось реальное (R 1), то возникнет разница между фактическим значением (R 1) и предписанным (уставка) и возникнет - управляющее воздействие на систему возбуждения. В действительности в схеме с УРРН регулирующее воздействие Iрег. на возбудитель генератора представляет сумму воздействий: Iрег. U = Uпр. – Ui – пропорциональное отклонению напряжения от предписанного значения; Iрег. Q = Qпр. – Qi – пропорциональное разности предписанного и истинного значения реактивной мощности. При равенстве Qпр = Qi автоматическая система работает только по U. Это замкнутая система регулирования (истинное значение Q сравнивается с предписанным значением). Есть разомкнутые системы – задается предписанное значение Q - без измерения истинной мощности.
 Обе из-за сложности и неточности не нашли широкого применения. Поэтому современные УРРН есть устройства уравнивания реактивных нагрузок. Принцип выполнения ГУВ с уравниванием реактивных нагрузок по среднему значению Уравнивание реактивных нагрузок однотипных генераторов, несущих различную активную мощность, вполне допустимо по условию экономичности распределения реактивных нагрузок, поскольку возникающие при этом дополнительные потери активной мощности весьма малы. Не оправдывает усложнение УРРН и возникающие дополнительные потери активной мощности при равномерном распределении реактивной мощности разнотипных генераторов. В качестве величины, пропорциональной реактивной мощности, используют либо напряжение ротора UР, либо ток ротора IР. Если Uр, то ОВ дополнительно объединяется в общую точку и вся схема находится под потенциалом Uр.
Обе из-за сложности и неточности не нашли широкого применения. Поэтому современные УРРН есть устройства уравнивания реактивных нагрузок. Принцип выполнения ГУВ с уравниванием реактивных нагрузок по среднему значению Уравнивание реактивных нагрузок однотипных генераторов, несущих различную активную мощность, вполне допустимо по условию экономичности распределения реактивных нагрузок, поскольку возникающие при этом дополнительные потери активной мощности весьма малы. Не оправдывает усложнение УРРН и возникающие дополнительные потери активной мощности при равномерном распределении реактивной мощности разнотипных генераторов. В качестве величины, пропорциональной реактивной мощности, используют либо напряжение ротора UР, либо ток ротора IР. Если Uр, то ОВ дополнительно объединяется в общую точку и вся схема находится под потенциалом Uр.
.") Если Iр, то необходимы трансформаторы постоянного тока (МУ без обратной связи, управляемый током ротора). Оба источника работают в режиме, близком к источнику ЭДС. Поэтому применяют схему в виде многолучевой звезды.
Если Iр, то необходимы трансформаторы постоянного тока (МУ без обратной связи, управляемый током ротора). Оба источника работают в режиме, близком к источнику ЭДС. Поэтому применяют схему в виде многолучевой звезды.
 - Среднее значение напряжения возбуждения; е 1, е 2, …, еn – ЭДС, пропорциональные Q конкретного агрегата; - внутреннее сопротивление источника ЭДС (например, сопротивление делителя напряжения, берущего отбор напряжения от обмотки возбуждения; - Сопротивление обмотки управления магнитного усилителя. Напряжение Uав моделирует предписанную реактивную мощность одного генератора, а Еi – истинную реактивную мощность генератора: Ток в ветви Ii будет пропорционален разности истинной и предписанной реактивной мощности и представляет регулирующее воздействие:
- Среднее значение напряжения возбуждения; е 1, е 2, …, еn – ЭДС, пропорциональные Q конкретного агрегата; - внутреннее сопротивление источника ЭДС (например, сопротивление делителя напряжения, берущего отбор напряжения от обмотки возбуждения; - Сопротивление обмотки управления магнитного усилителя. Напряжение Uав моделирует предписанную реактивную мощность одного генератора, а Еi – истинную реактивную мощность генератора: Ток в ветви Ii будет пропорционален разности истинной и предписанной реактивной мощности и представляет регулирующее воздействие:
 - появиться, если отличается от среднего . Иначе - управляющее воздействие возникнет, если развиваемая агрегатом Q будет отличаться от предписанной мощности, определенной по суммарной реактивной мощности станции, приходящейся на один генератор. Структурная схема регулятора
- появиться, если отличается от среднего . Иначе - управляющее воздействие возникнет, если развиваемая агрегатом Q будет отличаться от предписанной мощности, определенной по суммарной реактивной мощности станции, приходящейся на один генератор. Структурная схема регулятора
 через усилитель посылает управляющие сигналы Rпр. в исполнительные элементы, осуществляя") Общий регулятор возбуждения (ОРВ) через усилитель посылает управляющие сигналы Rпр. в исполнительные элементы, осуществляя регулирование напряжения на шинах ВН. Если реактивная мощность генераторов одинакова, то напряжения на выходах измерительных преобразователей (ИП) также будут одинаковы, и ток в цепях уравнивания будет отсутствовать. При неравенстве фактического и предписанного параметра распределения возникает корректирующий сигнал R соответствующего знака от схемы уравнивания реактивных нагрузок, который поступает в ИЭ. Исполнительный элемент будет изменять возбуждение до тех пор, пока реактивная нагрузка не станет равной предписанному значению, т. е. у всех генераторов будет одинаковой. Если ИЭ содержит интегрирующие звенья, то система распределения в обеих схемах астатична. В противном случае имеется статическая погрешность распределения.
Общий регулятор возбуждения (ОРВ) через усилитель посылает управляющие сигналы Rпр. в исполнительные элементы, осуществляя регулирование напряжения на шинах ВН. Если реактивная мощность генераторов одинакова, то напряжения на выходах измерительных преобразователей (ИП) также будут одинаковы, и ток в цепях уравнивания будет отсутствовать. При неравенстве фактического и предписанного параметра распределения возникает корректирующий сигнал R соответствующего знака от схемы уравнивания реактивных нагрузок, который поступает в ИЭ. Исполнительный элемент будет изменять возбуждение до тех пор, пока реактивная нагрузка не станет равной предписанному значению, т. е. у всех генераторов будет одинаковой. Если ИЭ содержит интегрирующие звенья, то система распределения в обеих схемах астатична. В противном случае имеется статическая погрешность распределения.
 В зависимости от системы возбуждения и устройств АРВ ГУВ может содержать: 1. Статический центральный АРВ и статическое устройство уравнивания реактивной нагрузки. По такому типу строится ГУВ на генераторах с электромашинными системами возбуждения и АРВ пропорционального действия. 2. Астатический центральный АРВ и астатическое устройство уравнивания реактивной нагрузки. Применяется на АРВ СД, поскольку первый способ снижает эффективность АРВ по производным, не обеспечивает требуемую точность распределения Q и регулирования напряжения. Приведенная схема – есть по сути второй вариант (ВЭИ): медленно действующее астатическое устройство ГУВ с сохранением индивидуальных регуляторов возбуждения. Центральный регулятор астатический пропорционального действия. И астатическое устройство УРН (Ш 1 -Ш 2) на основе многолучевой звезды. В качестве интегрирующих звеньев АРВ и УРН используются ЭД в виде передающего сельсина (центральный регулятор) и двухфазного ЭД устройства УРН. Передающий и приемные сельсины индивидуальных АРВ образуют синхронный вал передачи воздействия от ЦАРВ на устройства изменения уставок индивидуальных АРВ.
В зависимости от системы возбуждения и устройств АРВ ГУВ может содержать: 1. Статический центральный АРВ и статическое устройство уравнивания реактивной нагрузки. По такому типу строится ГУВ на генераторах с электромашинными системами возбуждения и АРВ пропорционального действия. 2. Астатический центральный АРВ и астатическое устройство уравнивания реактивной нагрузки. Применяется на АРВ СД, поскольку первый способ снижает эффективность АРВ по производным, не обеспечивает требуемую точность распределения Q и регулирования напряжения. Приведенная схема – есть по сути второй вариант (ВЭИ): медленно действующее астатическое устройство ГУВ с сохранением индивидуальных регуляторов возбуждения. Центральный регулятор астатический пропорционального действия. И астатическое устройство УРН (Ш 1 -Ш 2) на основе многолучевой звезды. В качестве интегрирующих звеньев АРВ и УРН используются ЭД в виде передающего сельсина (центральный регулятор) и двухфазного ЭД устройства УРН. Передающий и приемные сельсины индивидуальных АРВ образуют синхронный вал передачи воздействия от ЦАРВ на устройства изменения уставок индивидуальных АРВ.
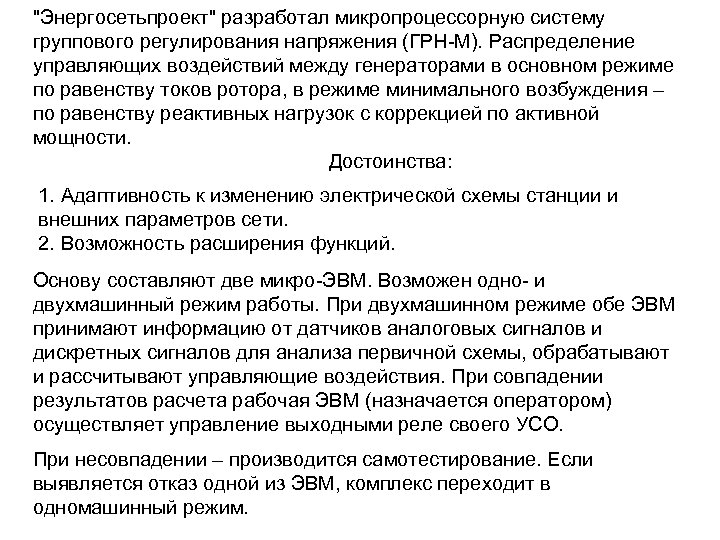 "Энергосетьпроект" разработал микропроцессорную систему группового регулирования напряжения (ГРН-М). Распределение управляющих воздействий между генераторами в основном режиме по равенству токов ротора, в режиме минимального возбуждения – по равенству реактивных нагрузок с коррекцией по активной мощности. Достоинства: 1. Адаптивность к изменению электрической схемы станции и внешних параметров сети. 2. Возможность расширения функций. Основу составляют две микро-ЭВМ. Возможен одно- и двухмашинный режим работы. При двухмашинном режиме обе ЭВМ принимают информацию от датчиков аналоговых сигналов и дискретных сигналов для анализа первичной схемы, обрабатывают и рассчитывают управляющие воздействия. При совпадении результатов расчета рабочая ЭВМ (назначается оператором) осуществляет управление выходными реле своего УСО. При несовпадении – производится самотестирование. Если выявляется отказ одной из ЭВМ, комплекс переходит в одномашинный режим.
"Энергосетьпроект" разработал микропроцессорную систему группового регулирования напряжения (ГРН-М). Распределение управляющих воздействий между генераторами в основном режиме по равенству токов ротора, в режиме минимального возбуждения – по равенству реактивных нагрузок с коррекцией по активной мощности. Достоинства: 1. Адаптивность к изменению электрической схемы станции и внешних параметров сети. 2. Возможность расширения функций. Основу составляют две микро-ЭВМ. Возможен одно- и двухмашинный режим работы. При двухмашинном режиме обе ЭВМ принимают информацию от датчиков аналоговых сигналов и дискретных сигналов для анализа первичной схемы, обрабатывают и рассчитывают управляющие воздействия. При совпадении результатов расчета рабочая ЭВМ (назначается оператором) осуществляет управление выходными реле своего УСО. При несовпадении – производится самотестирование. Если выявляется отказ одной из ЭВМ, комплекс переходит в одномашинный режим.
 Если тест не выявляет неисправность, то работа ГРН-М блокируется. Предусмотрена возможность телеуправления уставками, задания графика напряжения. В настоящее время разработана 2 -х уровневая микропроцессорная интегрированная АСУ ТП ГЭС и ГАЭС. Нижний агрегатный уровень содержит устройства: • Сбора и первичной обработки информации о состоянии ГГ и трансформаторов блока, схемы подключения, контроля и диагностики агрегатов и коммутационного оборудования; • Комплексного автоматического управления блоком "турбинагенератор-трансформатор" (МК автоматический синхронизатор, АРЧи. М, АРВ); • Регистрации аварийных ситуаций. Верхний уровень (общестанционный) состоит из подсистем: • Представления и отображения информации о нормальном режиме, регистрации а. р. ; • Автоматического управления н. р. станции; • Противоаварийной автоматики;
Если тест не выявляет неисправность, то работа ГРН-М блокируется. Предусмотрена возможность телеуправления уставками, задания графика напряжения. В настоящее время разработана 2 -х уровневая микропроцессорная интегрированная АСУ ТП ГЭС и ГАЭС. Нижний агрегатный уровень содержит устройства: • Сбора и первичной обработки информации о состоянии ГГ и трансформаторов блока, схемы подключения, контроля и диагностики агрегатов и коммутационного оборудования; • Комплексного автоматического управления блоком "турбинагенератор-трансформатор" (МК автоматический синхронизатор, АРЧи. М, АРВ); • Регистрации аварийных ситуаций. Верхний уровень (общестанционный) состоит из подсистем: • Представления и отображения информации о нормальном режиме, регистрации а. р. ; • Автоматического управления н. р. станции; • Противоаварийной автоматики;
 Информационной связи с вышестоящим уровнем управления и комплексного учета электроэнергии. Общестанционное устройство автоматического регулирования напряжения и реактивной мощности выявляет отклонений U и Q от предписанного значения и воздействует на задающие элементы изменения уставок, воздействует на АРКТ автотрансформаторов. Отличительная особенность МП реализации: • Прогнозирование реактивной нагрузки Эл. Ст, необходимой для поддержания на предписанном уровне напряжения на шинах на основе учета регулировочной характеристики ГЭС - Q=f(Uпред. ); • Учет различий регулировочных характеристик ГГ и индивидуальных ограничений по Q, её перераспределение в зависимости от режима работы (Ген. , СК, насосный, от активной нагрузки); • Анализ перетоков реактивной мощности через АТС между сборными шинами при управлении АРКТ; • Поагрегатный контроль выполнения управляющих воздействий и выдачу соответствующей информации.
Информационной связи с вышестоящим уровнем управления и комплексного учета электроэнергии. Общестанционное устройство автоматического регулирования напряжения и реактивной мощности выявляет отклонений U и Q от предписанного значения и воздействует на задающие элементы изменения уставок, воздействует на АРКТ автотрансформаторов. Отличительная особенность МП реализации: • Прогнозирование реактивной нагрузки Эл. Ст, необходимой для поддержания на предписанном уровне напряжения на шинах на основе учета регулировочной характеристики ГЭС - Q=f(Uпред. ); • Учет различий регулировочных характеристик ГГ и индивидуальных ограничений по Q, её перераспределение в зависимости от режима работы (Ген. , СК, насосный, от активной нагрузки); • Анализ перетоков реактивной мощности через АТС между сборными шинами при управлении АРКТ; • Поагрегатный контроль выполнения управляющих воздействий и выдачу соответствующей информации.
 Автоматическое регулирование напряжения на подстанции Назначение Оптимальный режим работы потребителей будет при оптимальном уровне напряжения. Например, при снижении напряжения на 10% вращающий момент асинхронных двигателей уменьшается на 19%, в электрических печах время плавки возрастает в 1, 5 -2 раза при снижении напряжения на 5%, при в/ч закалке – брак. При увеличении напряжения на 10% срок службы ламп накаливания снижается в 3 раза. Поэтому допустимое отклонение напряжения - U= 5%. Напряжение на шинах НН подстанции:
Автоматическое регулирование напряжения на подстанции Назначение Оптимальный режим работы потребителей будет при оптимальном уровне напряжения. Например, при снижении напряжения на 10% вращающий момент асинхронных двигателей уменьшается на 19%, в электрических печах время плавки возрастает в 1, 5 -2 раза при снижении напряжения на 5%, при в/ч закалке – брак. При увеличении напряжения на 10% срок службы ламп накаливания снижается в 3 раза. Поэтому допустимое отклонение напряжения - U= 5%. Напряжение на шинах НН подстанции:
 Где U'п – напряжение на шинах ВН приемной подстанции; UШ – на шинах отправной подстанции; R, X – активные и реактивные сопротивления ВЛ и трансформатора; P, Q – , мощности, передаваемые по ВЛ; N – коэффициент трансформации трансформатора. Повлиять на напряжение у потребителя Uп можно: • Изменив Uш (с помощью АРВ); • Изменить Q (не передавать по линии), что может осуществляться регулированием СК или СД, а также включением (отключением) статических конденсаторов, установленных на подстанции; • Изменить N – коэффициент трансформации трансформаторов (РПН).
Где U'п – напряжение на шинах ВН приемной подстанции; UШ – на шинах отправной подстанции; R, X – активные и реактивные сопротивления ВЛ и трансформатора; P, Q – , мощности, передаваемые по ВЛ; N – коэффициент трансформации трансформатора. Повлиять на напряжение у потребителя Uп можно: • Изменив Uш (с помощью АРВ); • Изменить Q (не передавать по линии), что может осуществляться регулированием СК или СД, а также включением (отключением) статических конденсаторов, установленных на подстанции; • Изменить N – коэффициент трансформации трансформаторов (РПН).
 и") Автоматический регулятор напряжения трансформаторов Современные трансформаторы оборудованы устройствами РПН (переключатель ответвлений под нагрузкой) и поставляются совместно с автоматическими регуляторами коэффициента трансформации (АРНТ), например, БАУРПН, АРТ-1 Н. Особенности автоматического регулирования коэффициента трансформации: 1) Дискретность действия регулятора, его нечувствительность к U < U ступени регулирования (1. 25 – 2. 5)%. 2) Нечувствительность к искажению формы кривой напряжения. 3) Действие с относительно большими выдержками времени (не менее 60 -80 сек. , чтобы не производить переключения при кратковременных изменениях напряжения – пусках, СЗП, удаленных КЗ). 4) Необходимость обеспечения встречного регулирования, т. е. с отрицательным статизмом. В связи с этим к АРНТ применяют следующие требования:
Автоматический регулятор напряжения трансформаторов Современные трансформаторы оборудованы устройствами РПН (переключатель ответвлений под нагрузкой) и поставляются совместно с автоматическими регуляторами коэффициента трансформации (АРНТ), например, БАУРПН, АРТ-1 Н. Особенности автоматического регулирования коэффициента трансформации: 1) Дискретность действия регулятора, его нечувствительность к U < U ступени регулирования (1. 25 – 2. 5)%. 2) Нечувствительность к искажению формы кривой напряжения. 3) Действие с относительно большими выдержками времени (не менее 60 -80 сек. , чтобы не производить переключения при кратковременных изменениях напряжения – пусках, СЗП, удаленных КЗ). 4) Необходимость обеспечения встречного регулирования, т. е. с отрицательным статизмом. В связи с этим к АРНТ применяют следующие требования:
 Реагирование на среднее значение выпрямленного напряжения. 2) Релейность действия с заданной зоной нечувствительности") 1) Реагирование на среднее значение выпрямленного напряжения. 2) Релейность действия с заданной зоной нечувствительности измерительного органа напряжения. 3) Высокий коэффициент возврата релейных элементов. 4) Необходимость ввода в ИО сигнала по току нагрузки Iнагр для задания статизма по току. Переключение отпаек проводится следующим образом KS – контакты переключателя ответвлений. В исходном состоянии (1) ток протекает по KS 1, KS 2, KM 1, KM 2, L (индуктивность катушки реактора) обтекается в разных направлениях, следовательно, общее сопротивление ХL=0.
1) Реагирование на среднее значение выпрямленного напряжения. 2) Релейность действия с заданной зоной нечувствительности измерительного органа напряжения. 3) Высокий коэффициент возврата релейных элементов. 4) Необходимость ввода в ИО сигнала по току нагрузки Iнагр для задания статизма по току. Переключение отпаек проводится следующим образом KS – контакты переключателя ответвлений. В исходном состоянии (1) ток протекает по KS 1, KS 2, KM 1, KM 2, L (индуктивность катушки реактора) обтекается в разных направлениях, следовательно, общее сопротивление ХL=0.
 Переключающее устройство приводится в движение электродвигателем и поэтому содержит механическое устройство, преобразующее непрерывное вращательное движение в дискретное. Первая операция - размыкание KM 2 и переключение KS 2 в условиях отсутствия в цепи тока. Ток нагрузки протекает по KS 1, KM 1, L. Затем замыкается KM 2. Возникает режим моста: два ответвления включены через две согласно включенные обмотки реактора, ток мал. Далее размыкается KM 1, переключается KS 1, включается KM 1. АРТ-1 Н Назначение Автоматическое управление электроприводами переключателя отпаек. Управление осуществляется импульсными сигналами. Устройство имеет возможность: • изменения уставок по напряжению; • контроля сигнализации и блокировки при неисправности тракта регулирования и электроприводов РПН; • Контроля и блокировки при рассогласовании переключений параллельно работающих трансформаторов и автотрансформаторов.
Переключающее устройство приводится в движение электродвигателем и поэтому содержит механическое устройство, преобразующее непрерывное вращательное движение в дискретное. Первая операция - размыкание KM 2 и переключение KS 2 в условиях отсутствия в цепи тока. Ток нагрузки протекает по KS 1, KM 1, L. Затем замыкается KM 2. Возникает режим моста: два ответвления включены через две согласно включенные обмотки реактора, ток мал. Далее размыкается KM 1, переключается KS 1, включается KM 1. АРТ-1 Н Назначение Автоматическое управление электроприводами переключателя отпаек. Управление осуществляется импульсными сигналами. Устройство имеет возможность: • изменения уставок по напряжению; • контроля сигнализации и блокировки при неисправности тракта регулирования и электроприводов РПН; • Контроля и блокировки при рассогласовании переключений параллельно работающих трансформаторов и автотрансформаторов.
 тракт регулирования с двумя") СТРУКТУРНАЯ СХЕМА Структурная схема содержит 3 основных функциональных звена: 1) тракт регулирования с двумя каналами управления ("убавить", "прибавить"); 2) блок управления и контроля (БУК); 3) генератор тактовых импульсов с элементами изменения периода следования (ГТИ).
СТРУКТУРНАЯ СХЕМА Структурная схема содержит 3 основных функциональных звена: 1) тракт регулирования с двумя каналами управления ("убавить", "прибавить"); 2) блок управления и контроля (БУК); 3) генератор тактовых импульсов с элементами изменения периода следования (ГТИ).
: 1 – сумматор 2 – датчик тока") В состав тракта регулирования входят (1 -9): 1 – сумматор 2 – датчик тока (Uк – контролируемое напряжение, Uтк – напряжение токовой компенсации) 3 – измерительный орган, в котором формируется и задается зона нечувствительности и уставки по напряжению АРТ-1 Н 4, 5 – элементы выдержки времени 6, 7 – элементы запрета 8, 9 – исполнительные элементы БУК – Блок управления и контроля (10 -12). 13 - ГТИ Контролируемое напряжение Uк суммируется с напряжением Uтк, формируемое датчиком тока. Этим осуществляется токовая компенсация (по аналогии с токовой компенсацией реактивного сопротивления трансформатора блока).
В состав тракта регулирования входят (1 -9): 1 – сумматор 2 – датчик тока (Uк – контролируемое напряжение, Uтк – напряжение токовой компенсации) 3 – измерительный орган, в котором формируется и задается зона нечувствительности и уставки по напряжению АРТ-1 Н 4, 5 – элементы выдержки времени 6, 7 – элементы запрета 8, 9 – исполнительные элементы БУК – Блок управления и контроля (10 -12). 13 - ГТИ Контролируемое напряжение Uк суммируется с напряжением Uтк, формируемое датчиком тока. Этим осуществляется токовая компенсация (по аналогии с токовой компенсацией реактивного сопротивления трансформатора блока).
 Благодаря токовой компенсации обеспечивается так называемое "встречное регулирование", необходимое для поддержания напряжения на шинах потребителя (а не в месте установки АРНТ). Uш – напряжение на НН шин подстанции. Если бы Uш поддерживалось на неизменном уровне, то с увеличением тока нагрузки напряжение у потребителя снижалось: Поэтому к измерительному органу подается напряжение:
Благодаря токовой компенсации обеспечивается так называемое "встречное регулирование", необходимое для поддержания напряжения на шинах потребителя (а не в месте установки АРНТ). Uш – напряжение на НН шин подстанции. Если бы Uш поддерживалось на неизменном уровне, то с увеличением тока нагрузки напряжение у потребителя снижалось: Поэтому к измерительному органу подается напряжение:
 ZТК – сопротивление токовой компенсации. Если ZТК выбрать так, чтобы , то => => регулятор контролирует напряжение не на шинах, а у потребителей, поддерживая его на неизменном уровне. Характеристика регулирования напряжения на шинах:
ZТК – сопротивление токовой компенсации. Если ZТК выбрать так, чтобы , то => => регулятор контролирует напряжение не на шинах, а у потребителей, поддерживая его на неизменном уровне. Характеристика регулирования напряжения на шинах:
 Регулятор обеспечивает встречное регулирование Так как от шин таких подстанций питается много потребителей, имеющих различную удаленность от шин подстанции, то ZТК надо подобрать как среднеудаленное значение сопротивления питающих кабелей, или выделить наиболее мощный и поддерживать его напряжение. Элемент 3 обеспечивает преобразование сигналов, поступающих от сумматора, формирует зону нечувствительности, изменение уставок и выдачу сигналов в элементы 4 -5.
Регулятор обеспечивает встречное регулирование Так как от шин таких подстанций питается много потребителей, имеющих различную удаленность от шин подстанции, то ZТК надо подобрать как среднеудаленное значение сопротивления питающих кабелей, или выделить наиболее мощный и поддерживать его напряжение. Элемент 3 обеспечивает преобразование сигналов, поступающих от сумматора, формирует зону нечувствительности, изменение уставок и выдачу сигналов в элементы 4 -5.
 Уставки регулятора по напряжению регулируются в пределах 85 -110%, двумя ступенями регулирования: Грубо – 5% Точно – 1% Уставки по зоне нечувствительности регулируются ступенями от 0 до 4% со ступенью 0. 5%. Зона нечувствительности – для предотвращения излишних переключений РПН при небольших колебаниях напряжения. Элементы 4, 5 создают выдержку времени на срабатывание (регулируется от 60 до 180 с) и осуществляют задержку сброса накопленного времени для отстройки от кратковременных бросков контролируемого напряжения. В цепях исполнительных элементов 8, 9 включены элементы запрета 6, 7, которые запрещают действие АРНТ при достижении приводными механизмами концевых положений, а также при неисправностях электроприводов и элементов схемы регулятора.
Уставки регулятора по напряжению регулируются в пределах 85 -110%, двумя ступенями регулирования: Грубо – 5% Точно – 1% Уставки по зоне нечувствительности регулируются ступенями от 0 до 4% со ступенью 0. 5%. Зона нечувствительности – для предотвращения излишних переключений РПН при небольших колебаниях напряжения. Элементы 4, 5 создают выдержку времени на срабатывание (регулируется от 60 до 180 с) и осуществляют задержку сброса накопленного времени для отстройки от кратковременных бросков контролируемого напряжения. В цепях исполнительных элементов 8, 9 включены элементы запрета 6, 7, которые запрещают действие АРНТ при достижении приводными механизмами концевых положений, а также при неисправностях электроприводов и элементов схемы регулятора.
 Управляющие команды на элементы запрета подаются от БУК, в состав которого входят элемент исправности регулятора 10, исправности электроприводов 11 и фиксации команды "переключение" электропривода 12. Одновременно с командой на запрет БУК выдает сигнал "неисправность". Исправность электропривода контролируется по результатам команд управления ("пошел" или "не пошел") и по времени ("закончил" или "застрял"). БУК управляет также измерительным органом 3 и ГТИ в процессе переключения: • Изменяет частоту следования тактовых импульсов, которыми задается масштаб времени для оценки длительности действия разных элементов устройства; • Через элемент 3 дает сигнал проверки – тест. Так при снижении U ниже границы зоны нечувствительности элемент 5 запускается и срабатывает с установленной выдержкой, выдавая сигнал на ИЭ 9. Если переключение задержится и произойдет лишь после определенного такта ГТИ фиксируется неисправность привода. При запуске электропривода изменяется тактовая частота. Если она осталась неизменной – фиксируется неисправность в системе регулирования.
Управляющие команды на элементы запрета подаются от БУК, в состав которого входят элемент исправности регулятора 10, исправности электроприводов 11 и фиксации команды "переключение" электропривода 12. Одновременно с командой на запрет БУК выдает сигнал "неисправность". Исправность электропривода контролируется по результатам команд управления ("пошел" или "не пошел") и по времени ("закончил" или "застрял"). БУК управляет также измерительным органом 3 и ГТИ в процессе переключения: • Изменяет частоту следования тактовых импульсов, которыми задается масштаб времени для оценки длительности действия разных элементов устройства; • Через элемент 3 дает сигнал проверки – тест. Так при снижении U ниже границы зоны нечувствительности элемент 5 запускается и срабатывает с установленной выдержкой, выдавая сигнал на ИЭ 9. Если переключение задержится и произойдет лишь после определенного такта ГТИ фиксируется неисправность привода. При запуске электропривода изменяется тактовая частота. Если она осталась неизменной – фиксируется неисправность в системе регулирования.
 В однофазных трансформаторах, в з-х фазных АТС с регулированием в обмотках среднего напряжения, а также при воздействии АРНТ на два параллельно работающих трансформатора предусмотрена блокировка действия регулятора при длительном рассогласовании на одну ступень РПН. Дополнение После начала процесса переключения от электропривода (ЭП) поступает сигнал 1) в БУК, который увеличивает период Ттакт следования импульсов ГТИ до значения, превышающее длительность переключения ответвлений трансформатора; 2) увеличивает зону нечувствительности регулятора. Это необходимо для проверки исправности регулятора и привода РПН. Если привод не запустился (не пришел сигнал в БУК о начале процесса переключения) или если до момента появления импульса от ГТИ с увеличенным Ттакт не поступил сигнал от ЭП о завершении переключения отпайки – фиксируется неисправность ЭП, повторное воздействие на ЭП запрещается, выдается информация о неисправности.
В однофазных трансформаторах, в з-х фазных АТС с регулированием в обмотках среднего напряжения, а также при воздействии АРНТ на два параллельно работающих трансформатора предусмотрена блокировка действия регулятора при длительном рассогласовании на одну ступень РПН. Дополнение После начала процесса переключения от электропривода (ЭП) поступает сигнал 1) в БУК, который увеличивает период Ттакт следования импульсов ГТИ до значения, превышающее длительность переключения ответвлений трансформатора; 2) увеличивает зону нечувствительности регулятора. Это необходимо для проверки исправности регулятора и привода РПН. Если привод не запустился (не пришел сигнал в БУК о начале процесса переключения) или если до момента появления импульса от ГТИ с увеличенным Ттакт не поступил сигнал от ЭП о завершении переключения отпайки – фиксируется неисправность ЭП, повторное воздействие на ЭП запрещается, выдается информация о неисправности.
 Увеличением зоны нечувствительности производится проверка регулятора. Так при возникновении отклонения напряжения, при котором требуется переключение не менее 2 -х ответвлений обмотки трансформатора, увеличение нечувствительности обуславливает отсутствие сигнала от исправной измерительной части после переключения одного ответвления. Если это так, то зона нечувствительности восстанавливается и разрешается следующий пуск ЭП на переключение 2 -го ответвления без повторной выдержки времени. Если же от измерительного элемента сигнал не снялся, то фиксируется неисправность регулятора, повторный запуск ЭП запрещается, выдается сигнал "неисправность". "АББ-реле Чебоксары" выпускает микропроцессорный автоматический регулятор SPAU 341 С. Это интегрированное автоматическое устройство, выполняющее кроме собственно функций регулятора набор дополнительных сервисных функций, свойственных МКС (фиксирует U, I, и т. д. ).
Увеличением зоны нечувствительности производится проверка регулятора. Так при возникновении отклонения напряжения, при котором требуется переключение не менее 2 -х ответвлений обмотки трансформатора, увеличение нечувствительности обуславливает отсутствие сигнала от исправной измерительной части после переключения одного ответвления. Если это так, то зона нечувствительности восстанавливается и разрешается следующий пуск ЭП на переключение 2 -го ответвления без повторной выдержки времени. Если же от измерительного элемента сигнал не снялся, то фиксируется неисправность регулятора, повторный запуск ЭП запрещается, выдается сигнал "неисправность". "АББ-реле Чебоксары" выпускает микропроцессорный автоматический регулятор SPAU 341 С. Это интегрированное автоматическое устройство, выполняющее кроме собственно функций регулятора набор дополнительных сервисных функций, свойственных МКС (фиксирует U, I, и т. д. ).
 Управляя батареями конденсаторов, можно уменьшить колебания напряжения на шинах подстанции…") Управление батареями конденсаторов (БК) Управляя батареями конденсаторов, можно уменьшить колебания напряжения на шинах подстанции… Применяются специальные емкости для выработки Q. По своему действию они эквивалентны перевозбужденному СК. Мощность конденсаторов в одном элементе составляет 4 -10 к. ВАр. Из них собирают батарею требуемой мощности. Обычно батарею включают по схеме "треугольник". При отключении конденсаторов необходимо, чтобы они разрядились на R автоматически. Разрядное сопротивление должно быть таким, чтобы при отключении не возникало перенапряжений на зажимах конденсаторов. Достоинства БК: - малые потери (0, 0025 -0, 005) к. Вт/к. ВАр; - просты в эксплуатации; - простота производства монтажных работ. Недостатки: - зависимость Q=U 2 C 10 -3 к. ВАр; - недостаточная прочность.
Управление батареями конденсаторов (БК) Управляя батареями конденсаторов, можно уменьшить колебания напряжения на шинах подстанции… Применяются специальные емкости для выработки Q. По своему действию они эквивалентны перевозбужденному СК. Мощность конденсаторов в одном элементе составляет 4 -10 к. ВАр. Из них собирают батарею требуемой мощности. Обычно батарею включают по схеме "треугольник". При отключении конденсаторов необходимо, чтобы они разрядились на R автоматически. Разрядное сопротивление должно быть таким, чтобы при отключении не возникало перенапряжений на зажимах конденсаторов. Достоинства БК: - малые потери (0, 0025 -0, 005) к. Вт/к. ВАр; - просты в эксплуатации; - простота производства монтажных работ. Недостатки: - зависимость Q=U 2 C 10 -3 к. ВАр; - недостаточная прочность.
 В практике эксплуатации применяют разные схемы автоматики управления БК – в зависимости от значения напряжения на подстанции, тока нагрузки, направления реактивной мощности в линии.
В практике эксплуатации применяют разные схемы автоматики управления БК – в зависимости от значения напряжения на подстанции, тока нагрузки, направления реактивной мощности в линии.
 Эти схемы по тому или иному признаку поддерживают экономически выгодное напряжение на шинах. При наличии стабильных суточных графиков нагрузки (для промышленных предприятий они существенно не отличаются) применяют схемы регулирования по заранее заданной программе. Признаки, по которым можно управлять БК: • по напряжению на подстанции; • по току нагрузки; • по направлению реактивной мощности в питающей линии; • схема управления по заданной программе • Регулирование может осуществляться по cos. Управление БК может быть одноступенчатым. В этом случае схема автоматического управления содержит 2 реле напряжения и 2 реле времени (10 -20 с). Достоинство: простота. Недостаток: большие зоны нечувствительности и колебания напряжения.
Эти схемы по тому или иному признаку поддерживают экономически выгодное напряжение на шинах. При наличии стабильных суточных графиков нагрузки (для промышленных предприятий они существенно не отличаются) применяют схемы регулирования по заранее заданной программе. Признаки, по которым можно управлять БК: • по напряжению на подстанции; • по току нагрузки; • по направлению реактивной мощности в питающей линии; • схема управления по заданной программе • Регулирование может осуществляться по cos. Управление БК может быть одноступенчатым. В этом случае схема автоматического управления содержит 2 реле напряжения и 2 реле времени (10 -20 с). Достоинство: простота. Недостаток: большие зоны нечувствительности и колебания напряжения.
 Для более плавного регулирования напряжения применяют схемы, в которых отключение и включение конденсаторов осуществляется несколькими ступенями. Например, регулятор "Аркон". Его измерительная часть аналогична АРТ-1 Н. Регулятор выявляет направления воздействия (на вкл. или откл. ). Подлежащая включению или отключению секция батарей определяется логическим алгоритмом приставок. Могут быть равные мощности конденсаторных батарей, тогда секции включаются поочередно. Могут быть неравные мощности секций, что позволяет повысить число ступеней регулирования. Например, 3 секции с соотношением мощности 1: 2: 3 позволяет получить 7 ступеней регулирования (при этом усложняется алгоритм управления). В настоящее время у нас и за рубежом для поддержания баланса мощности по Q не только в установившемся, но и при переходных режимах, разработаны статические тиристорные управляемые компенсаторы – СТК. Причем, они не только могут генерировать, но и потреблять реактивную мощность.
Для более плавного регулирования напряжения применяют схемы, в которых отключение и включение конденсаторов осуществляется несколькими ступенями. Например, регулятор "Аркон". Его измерительная часть аналогична АРТ-1 Н. Регулятор выявляет направления воздействия (на вкл. или откл. ). Подлежащая включению или отключению секция батарей определяется логическим алгоритмом приставок. Могут быть равные мощности конденсаторных батарей, тогда секции включаются поочередно. Могут быть неравные мощности секций, что позволяет повысить число ступеней регулирования. Например, 3 секции с соотношением мощности 1: 2: 3 позволяет получить 7 ступеней регулирования (при этом усложняется алгоритм управления). В настоящее время у нас и за рубежом для поддержания баланса мощности по Q не только в установившемся, но и при переходных режимах, разработаны статические тиристорные управляемые компенсаторы – СТК. Причем, они не только могут генерировать, но и потреблять реактивную мощность.
 Простейший – конденсаторный СТК с дискретным регулированием осуществляет коммутацию конденсаторов тиристорами. СТК прост, экономичен, хорошие условия коммутации (без бросков тока и перенапряжений, нет высших гармоник в токе. Но плохая точность регулирования. Число ступеней в системе электроснабжения может быть 7 -11, в ЭЭС для повышения устойчивости и предела передаваемой мощности – 20 -30. При непрерывном регулировании (на практике только для реакторов), изменение Q производится путем изменения угла включения тиристоров, т. е. регулируется потребляемая реактивная мощность.
Простейший – конденсаторный СТК с дискретным регулированием осуществляет коммутацию конденсаторов тиристорами. СТК прост, экономичен, хорошие условия коммутации (без бросков тока и перенапряжений, нет высших гармоник в токе. Но плохая точность регулирования. Число ступеней в системе электроснабжения может быть 7 -11, в ЭЭС для повышения устойчивости и предела передаваемой мощности – 20 -30. При непрерывном регулировании (на практике только для реакторов), изменение Q производится путем изменения угла включения тиристоров, т. е. регулируется потребляемая реактивная мощность.
 Ступенчатое изменение реактивной мощности осуществляют путем подключения конденсаторных батарей. "Плюс" – высокая точность регулирования, благоприятный режим для тиристоров в цепи с реактором, высокое быстродействие. "Минус" – наличие высших гармонических. Для снижения потребления реактивной мощности мало загруженные ЭД нужно менять на ЭД меньшей мощности. Потребляемая двигателем реактивная мощность при номинальной нагрузке: Реактивная мощность, потребляемая двигателем из сети при работе на ХХ: QХХ = 3 UНIxx.
Ступенчатое изменение реактивной мощности осуществляют путем подключения конденсаторных батарей. "Плюс" – высокая точность регулирования, благоприятный режим для тиристоров в цепи с реактором, высокое быстродействие. "Минус" – наличие высших гармонических. Для снижения потребления реактивной мощности мало загруженные ЭД нужно менять на ЭД меньшей мощности. Потребляемая двигателем реактивная мощность при номинальной нагрузке: Реактивная мощность, потребляемая двигателем из сети при работе на ХХ: QХХ = 3 UНIxx.
 Для ЭД с cos =0, 91 -0, 93 QХХ составляет примерно 50% от QН, а для ЭД с cos =0, 77 -0, 79 около 70%. Если средняя загрузка ЭД составляет менее 45%, то замена на менее мощный ЭД всегда целесообразна и проверки расчетами не требует! При коэффициенте загрузки более 70% - не целесообразна. Второй путь – понижение напряжения у мало загруженных ЭД путем переключения обмоток с "треугольника" на "звезду". При этом его мощность снизится в 3 раза. Третье мероприятие – ограничение режима холостого хода ЭД.
Для ЭД с cos =0, 91 -0, 93 QХХ составляет примерно 50% от QН, а для ЭД с cos =0, 77 -0, 79 около 70%. Если средняя загрузка ЭД составляет менее 45%, то замена на менее мощный ЭД всегда целесообразна и проверки расчетами не требует! При коэффициенте загрузки более 70% - не целесообразна. Второй путь – понижение напряжения у мало загруженных ЭД путем переключения обмоток с "треугольника" на "звезду". При этом его мощность снизится в 3 раза. Третье мероприятие – ограничение режима холостого хода ЭД.
 Автоматические регуляторы частоты вращения Первичные регуляторы Регуляторы, осуществляющие процесс регулирования, не требуя для своей работы постороннего источника энергии – регуляторы прямого действия. Например, регулятор числа оборотов двигателя внутреннего сгорания с помощью центробежного регулятора прямого действия. Они просты и надежны, поэтому могут быть предпочтительны. Однако это не всегда возможно. Например, при регулировании высокой температуры применение манометрических термометров исключено. Применяют термопары, которые дают очень слабый сигнал. Требуется усилитель. Введение усилителя позволяет реализовать любые усилия, скорость перемещения привода исполнительного механизма. Энергия для усилителя может быть электрическая, гидравлическая, сжатого воздуха, пара… Регуляторы, содержащие в цепи регулирования усилители, называют регуляторами непрямого действия.
Автоматические регуляторы частоты вращения Первичные регуляторы Регуляторы, осуществляющие процесс регулирования, не требуя для своей работы постороннего источника энергии – регуляторы прямого действия. Например, регулятор числа оборотов двигателя внутреннего сгорания с помощью центробежного регулятора прямого действия. Они просты и надежны, поэтому могут быть предпочтительны. Однако это не всегда возможно. Например, при регулировании высокой температуры применение манометрических термометров исключено. Применяют термопары, которые дают очень слабый сигнал. Требуется усилитель. Введение усилителя позволяет реализовать любые усилия, скорость перемещения привода исполнительного механизма. Энергия для усилителя может быть электрическая, гидравлическая, сжатого воздуха, пара… Регуляторы, содержащие в цепи регулирования усилители, называют регуляторами непрямого действия.
 Они имеют серьезное преимущество: универсальность использования для автоматического регулирования самых разных объектов. Статическое и астатическое регулирование. Изодром.
Они имеют серьезное преимущество: универсальность использования для автоматического регулирования самых разных объектов. Статическое и астатическое регулирование. Изодром.
 Приведенный выше регулятор работает с определенной статической ошибкой. Чем больше нагрузка, тем больше должен быть ход рейки топливного насоса (в стороны увеличения подачи топлива). Но для этого должно измениться положение муфты регулятора, связанного жестко с рейкой насоса. Новое же положение муфты может быть только при другом числе оборотов, при котором результирующая сила упругости пружины, веса муфты и грузов регулятора будет уравновешивать центробежную силу, возникающую при вращении этих грузов. Новое значение частоты вращения будет меньше старого. Это статический регулятор. Регулятор непрямого действия с гидравлическим усилителем (ГУ). ГУ состоит из золотникового усилителя и поршня. Для усиления используется энергия жидкости под высоким давлением.
Приведенный выше регулятор работает с определенной статической ошибкой. Чем больше нагрузка, тем больше должен быть ход рейки топливного насоса (в стороны увеличения подачи топлива). Но для этого должно измениться положение муфты регулятора, связанного жестко с рейкой насоса. Новое же положение муфты может быть только при другом числе оборотов, при котором результирующая сила упругости пружины, веса муфты и грузов регулятора будет уравновешивать центробежную силу, возникающую при вращении этих грузов. Новое значение частоты вращения будет меньше старого. Это статический регулятор. Регулятор непрямого действия с гидравлическим усилителем (ГУ). ГУ состоит из золотникового усилителя и поршня. Для усиления используется энергия жидкости под высоким давлением.
 Золотник сервомотора может находиться в среднем положении, перекрывая доступ масла в полости цилиндра, только вполне определенном положении муфты центробежного регулятора, т. е. при одном значении числа оборотов N 1.
Золотник сервомотора может находиться в среднем положении, перекрывая доступ масла в полости цилиндра, только вполне определенном положении муфты центробежного регулятора, т. е. при одном значении числа оборотов N 1.
 Любое изменение "N" вызывает перемещение тарелок золотника и, соответственно, поршня цилиндра: обороты снизились, тарелки золотника пошли вверх, соединяя верхнюю полость цилиндра со средней полостью золотника (высокое давление), а нижнюю полость цилиндра – с областью низкого давления ("слив"). Поршень движется вниз, увеличивая подачу топлива в двигатель и, соответственно, двигатель начинает увеличивать обороты. Такое движение будет до тех пор, пока не будет установлено заданное число оборотов N 1! При этом вновь будут перекрыты окна золотника. Здесь положение регулирующего органа (поршня) не связано жестко с величиной регулируемого параметра, т. к. при данном числе оборотов N 1 положение поршня сервомотора и рейки насоса может быть любым. Это астатический регулятор.
Любое изменение "N" вызывает перемещение тарелок золотника и, соответственно, поршня цилиндра: обороты снизились, тарелки золотника пошли вверх, соединяя верхнюю полость цилиндра со средней полостью золотника (высокое давление), а нижнюю полость цилиндра – с областью низкого давления ("слив"). Поршень движется вниз, увеличивая подачу топлива в двигатель и, соответственно, двигатель начинает увеличивать обороты. Такое движение будет до тех пор, пока не будет установлено заданное число оборотов N 1! При этом вновь будут перекрыты окна золотника. Здесь положение регулирующего органа (поршня) не связано жестко с величиной регулируемого параметра, т. к. при данном числе оборотов N 1 положение поршня сервомотора и рейки насоса может быть любым. Это астатический регулятор.
 Здесь применен гидроусилитель с золотником и поршневым исполнительным механизмом. Но может быть и электромагнитный или пневмоусилитель. Закон регулирования будет астатический. Устранение статической ошибки связано с введением интеграла в закон регулирования. Интегрирующим звеном здесь является гидродвигатель с золотниковым управлением. Скорость перемещения поршня ГД пропорциональна величине открытия окон золотника. Астатические регулятора как прямого, так и непрямого действия очень часто в динамическом отношении (в переходном процессе) уступают статическим. Поэтому применять их следует там, где недопустимо иметь даже малую статическую ошибку. В других случаях предпочтение отдается статическим системам регулирования. Статические регуляторы Астатический регулятор можно сделать статическим, если установить однозначную зависимость между положением регулирующего органа и значением регулируемого параметра ("N" в данном случае).
Здесь применен гидроусилитель с золотником и поршневым исполнительным механизмом. Но может быть и электромагнитный или пневмоусилитель. Закон регулирования будет астатический. Устранение статической ошибки связано с введением интеграла в закон регулирования. Интегрирующим звеном здесь является гидродвигатель с золотниковым управлением. Скорость перемещения поршня ГД пропорциональна величине открытия окон золотника. Астатические регулятора как прямого, так и непрямого действия очень часто в динамическом отношении (в переходном процессе) уступают статическим. Поэтому применять их следует там, где недопустимо иметь даже малую статическую ошибку. В других случаях предпочтение отдается статическим системам регулирования. Статические регуляторы Астатический регулятор можно сделать статическим, если установить однозначную зависимость между положением регулирующего органа и значением регулируемого параметра ("N" в данном случае).
 Для этого нужно ввести дополнительно обратную связь. Её действие заключается в том, что она передает воздействие от последующего звена системы регулирования одному из предыдущих звеньев. У – усилитель, ИМ – исполнительный механизм, РО регулирующий орган, ОР – объект регулирования, Х возмущающее воздействие. – – Для рассмотренного выше астатического регулятора золотник дополнительно связан со штоком гидродвигателя (поршнем).
Для этого нужно ввести дополнительно обратную связь. Её действие заключается в том, что она передает воздействие от последующего звена системы регулирования одному из предыдущих звеньев. У – усилитель, ИМ – исполнительный механизм, РО регулирующий орган, ОР – объект регулирования, Х возмущающее воздействие. – – Для рассмотренного выше астатического регулятора золотник дополнительно связан со штоком гидродвигателя (поршнем).
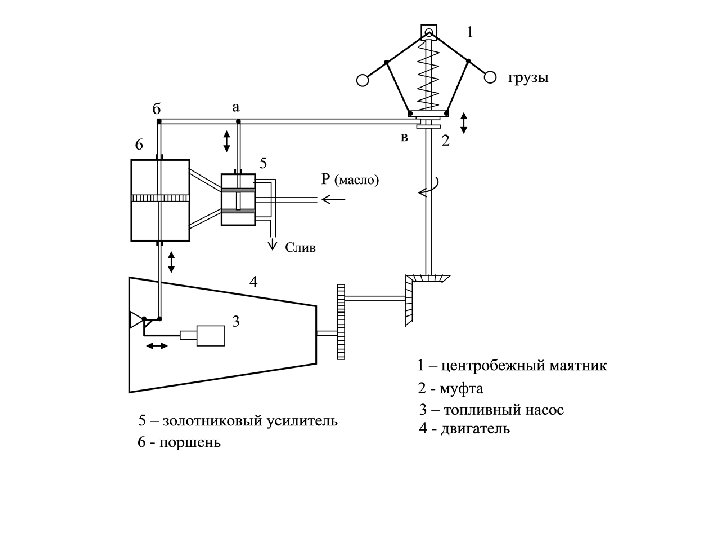
 При изменении "N" изменяется положение муфты, это приводит к изменению положения тарелок золотника, т. к. точка "б" пока неподвижна. Перемещение точки "а" вызовет перемещение поршня (и точки "б") в обратном направлении. Изменится подача топлива и, следовательно, "N". Однако передвижение точки "б" приведет к тому, что золотник займет нейтральное положение ещё до того, как частота достигнет номинального значения (N=Nном), т. е. муфта не вернется в начальное положение, а частота N Nном. Каждому значению "N" будет соответствовать определенное положение регулирующего органа, определяемое конструктивными соотношениями. Это и есть ООС. Обратная связь действует постоянно – как в переходном процессе, так и в состоянии равновесия системы. Её называют жесткой. В результате мы получили из астатического регулятора – статический.
При изменении "N" изменяется положение муфты, это приводит к изменению положения тарелок золотника, т. к. точка "б" пока неподвижна. Перемещение точки "а" вызовет перемещение поршня (и точки "б") в обратном направлении. Изменится подача топлива и, следовательно, "N". Однако передвижение точки "б" приведет к тому, что золотник займет нейтральное положение ещё до того, как частота достигнет номинального значения (N=Nном), т. е. муфта не вернется в начальное положение, а частота N Nном. Каждому значению "N" будет соответствовать определенное положение регулирующего органа, определяемое конструктивными соотношениями. Это и есть ООС. Обратная связь действует постоянно – как в переходном процессе, так и в состоянии равновесия системы. Её называют жесткой. В результате мы получили из астатического регулятора – статический.
 Однако в астатический регулятор непрямого действия можно ввести устройство, реализующее временный статизм. Для этого обратная связь должна действовать лишь во время регулирования и устранялась бы при подходе системы к равновесию. Такая обратная связь называется гибкой или изодромной. По-гречески "изос" – равный, "дромос" – бег. Впервые изодромные регуляторы – центробежные, для обеспечения постоянства числа оборотов двигателей при разной нагрузке. Для предыдущего регулятора необходимо ввести гидравлический демпфер.
Однако в астатический регулятор непрямого действия можно ввести устройство, реализующее временный статизм. Для этого обратная связь должна действовать лишь во время регулирования и устранялась бы при подходе системы к равновесию. Такая обратная связь называется гибкой или изодромной. По-гречески "изос" – равный, "дромос" – бег. Впервые изодромные регуляторы – центробежные, для обеспечения постоянства числа оборотов двигателей при разной нагрузке. Для предыдущего регулятора необходимо ввести гидравлический демпфер.
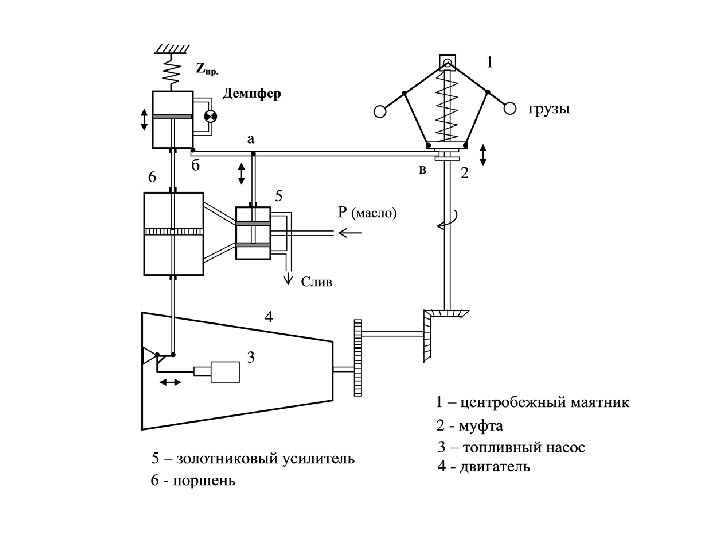
 При изменении нагрузки точка "в" отклонилась, это привело к отклонению тарелок золотника (точка "а"), т. к. точка "б" ещё неподвижна, поскольку масло в демпфере не успевает перетекать через небольшое отверстие, связывающее две полости демпфера. Начинает двигаться поршень и вместе с ним – цилиндр демпфера, растягивая пружину. Следовательно, перемещается и точка "б" обратной связи, вводя таким образом статизм. Но как только скорость поршня уменьшится до определенной величины, под действием силы пружины масло будет продолжать перетекать из одной полости в другую, и цилиндр демпфера будет стремиться вернуться в исходное положение. Равновесие установится тогда, когда точки "а", "б" и "в" придут в исходное положение (золотник – в нейтральное), а это возможно, если N=Nном! Таким образом, система остается астатической, статизм вводится в течение некоторого времени, что улучшает протекание переходного процесса.
При изменении нагрузки точка "в" отклонилась, это привело к отклонению тарелок золотника (точка "а"), т. к. точка "б" ещё неподвижна, поскольку масло в демпфере не успевает перетекать через небольшое отверстие, связывающее две полости демпфера. Начинает двигаться поршень и вместе с ним – цилиндр демпфера, растягивая пружину. Следовательно, перемещается и точка "б" обратной связи, вводя таким образом статизм. Но как только скорость поршня уменьшится до определенной величины, под действием силы пружины масло будет продолжать перетекать из одной полости в другую, и цилиндр демпфера будет стремиться вернуться в исходное положение. Равновесие установится тогда, когда точки "а", "б" и "в" придут в исходное положение (золотник – в нейтральное), а это возможно, если N=Nном! Таким образом, система остается астатической, статизм вводится в течение некоторого времени, что улучшает протекание переходного процесса.
 Использование сервомотора – не единственный способ введения интеграла в закон регулирования. Интеграл может быть введен разными способами и в любом месте контура системы регулирования и результатом будет превращение системы регулирования в астатическую. Например, можно регулировать скорость вращения электродвигателя (n), управляя с помощью электромашинного усилителя током якоря ЭД. При статическом законе: I =КР· n Вводя интеграл в закон управления, получим закон регулирования для астатического регулятора с изодромом: I =КР·( n + К∫ n·d ) Здесь первое слагаемое – регулирующий сигнал по отклонению (статизм), второе – по интегральной функции отклонения регулируемого параметра.
Использование сервомотора – не единственный способ введения интеграла в закон регулирования. Интеграл может быть введен разными способами и в любом месте контура системы регулирования и результатом будет превращение системы регулирования в астатическую. Например, можно регулировать скорость вращения электродвигателя (n), управляя с помощью электромашинного усилителя током якоря ЭД. При статическом законе: I =КР· n Вводя интеграл в закон управления, получим закон регулирования для астатического регулятора с изодромом: I =КР·( n + К∫ n·d ) Здесь первое слагаемое – регулирующий сигнал по отклонению (статизм), второе – по интегральной функции отклонения регулируемого параметра.
 Изменение количества энергоносителя поступающего в турбину осуществляется регулятором") Автоматические регуляторы частоты вращения турбины (АРЧВ) Изменение количества энергоносителя поступающего в турбину осуществляется регулятором турбины. Для паровых турбин – паровпускной (дроссельный) клапан или группа клапанов Для гидротурбин – направляющие аппараты Статические характеристики турбин могут быть получены из уравнения мощности по следующим соотношениям. ПТ – ГТ – Ап, Аг – Коэффициенты, зависящие от единицы измерения; D – часовой расход пара; Q – часовой расход воды; - тепловой перепад; - тепловой кпд; H – перепад (напор воды – разница между УВБ и УНБ); - КПД.
Автоматические регуляторы частоты вращения турбины (АРЧВ) Изменение количества энергоносителя поступающего в турбину осуществляется регулятором турбины. Для паровых турбин – паровпускной (дроссельный) клапан или группа клапанов Для гидротурбин – направляющие аппараты Статические характеристики турбин могут быть получены из уравнения мощности по следующим соотношениям. ПТ – ГТ – Ап, Аг – Коэффициенты, зависящие от единицы измерения; D – часовой расход пара; Q – часовой расход воды; - тепловой перепад; - тепловой кпд; H – перепад (напор воды – разница между УВБ и УНБ); - КПД.
 Задача автоматического регулирования поддержать путем воздействия на регулирующие органы турбины. 3 – установившийся режим с прежней частотой с новой нагрузкой и с новым количеством пара, подаваемого в паровую турбину. Передаточная функция турбины: - есть инерционное звено первого порядка.
Задача автоматического регулирования поддержать путем воздействия на регулирующие органы турбины. 3 – установившийся режим с прежней частотой с новой нагрузкой и с новым количеством пара, подаваемого в паровую турбину. Передаточная функция турбины: - есть инерционное звено первого порядка.
 Регулирования частоты вращения по принятому закону; 2) Ограничение возможного увеличения") Основные функции АРЧВ 1) Регулирования частоты вращения по принятому закону; 2) Ограничение возможного увеличения частоты вращения в ПП; 3) Пуск и останов турбины; 4) Изменение частоты при синхронизации; 5) Распределение нагрузки между параллельно работающими агрегатами; 6) Режимные ограничения мощности. АРЧВ не должен допускать срабатывание автомата безопасности – не допускать повышение частоты выше 55 Гц. Для гидротурбин допускаются большие угонные скорости (30%). Структурная схема АРЧВ, соответствующая пропорциональному регулятору
Основные функции АРЧВ 1) Регулирования частоты вращения по принятому закону; 2) Ограничение возможного увеличения частоты вращения в ПП; 3) Пуск и останов турбины; 4) Изменение частоты при синхронизации; 5) Распределение нагрузки между параллельно работающими агрегатами; 6) Режимные ограничения мощности. АРЧВ не должен допускать срабатывание автомата безопасности – не допускать повышение частоты выше 55 Гц. Для гидротурбин допускаются большие угонные скорости (30%). Структурная схема АРЧВ, соответствующая пропорциональному регулятору
. С помощью ЗЭ") Все регуляторы снабжаются механизмом для изменения уставки по частоте (МУТ, МИЧВ). С помощью ЗЭ статическую характеристику можно перемещать вверх и вниз. Для изменения уставки необходимо внешнее воздействие. Регулирование может осуществляться как по статическому, так и астатическому закону:
Все регуляторы снабжаются механизмом для изменения уставки по частоте (МУТ, МИЧВ). С помощью ЗЭ статическую характеристику можно перемещать вверх и вниз. Для изменения уставки необходимо внешнее воздействие. Регулирование может осуществляться как по статическому, так и астатическому закону:
 Гидромеханический регулятор частоты вращения Применяют на ПТ небольшой мощности. Рычаг-повторитель
Гидромеханический регулятор частоты вращения Применяют на ПТ небольшой мощности. Рычаг-повторитель
 Чем больше частота, тем выше поднимается муфта. Если частота уменьшается, то муфта движется вниз. 1 – центробежный маятник; 2 – МУТ; 3 – главный рычаг сумматора (связан со штоком гидродвигателя; 4 – гидродвигатель с золотниковым управлением; 5 – дроссельный клапан. Это регулятор пропорционального действия (обратная связь жесткая – механическая связь двигателя с сумматором 3). Гидродвигатель воздействует на паровпускной клапан турбины 5. МУТ – для изменения уставки регулятора и перемещения его статической характеристики: перемещается шток, рычагповторитель главного рычага сумматора. Нейтральному положению золотника соответствуют различные положения штока поршня двигателя и муфты маятника… Преобразовательно-усилительный механизм – для усиления регулирующего воздействия. Для управления турбиной необходимо создать давление, измеряемое в тоннах - даже для турбины небольшой мощности. Это гидродвигатель с золотниковым управлением.
Чем больше частота, тем выше поднимается муфта. Если частота уменьшается, то муфта движется вниз. 1 – центробежный маятник; 2 – МУТ; 3 – главный рычаг сумматора (связан со штоком гидродвигателя; 4 – гидродвигатель с золотниковым управлением; 5 – дроссельный клапан. Это регулятор пропорционального действия (обратная связь жесткая – механическая связь двигателя с сумматором 3). Гидродвигатель воздействует на паровпускной клапан турбины 5. МУТ – для изменения уставки регулятора и перемещения его статической характеристики: перемещается шток, рычагповторитель главного рычага сумматора. Нейтральному положению золотника соответствуют различные положения штока поршня двигателя и муфты маятника… Преобразовательно-усилительный механизм – для усиления регулирующего воздействия. Для управления турбиной необходимо создать давление, измеряемое в тоннах - даже для турбины небольшой мощности. Это гидродвигатель с золотниковым управлением.
 В качестве рабочей жидкости используется масло или невоспламеняемая жидкость. В золотнике – двухтарельчатый поршень. В сливной линии давление равно атмосферному. Правые окна в буксе соединены с верхним и нижним полостями двигателя. Сам двигатель состоит из поршня и штока. По принципу действия ГД интегрирует управляющие воздействия: W(P)=1/TДР. ГД, снабженный механизмом выключения (ЖОС), превращается в гидроусилитель с передаточной функцией инерционного звена: W(P)=1/(TДР+1). Поршень в нейтральном состоянии не может перемещаться из-за давления пара вследствие несжимаемости жидкости. При отклонении частоты двигается муфта и передвигает поршень тарелок золотника, вследствие этого в какую-то часть двигателя подается повышенное давление, следовательно, поршень перемещается, увеличивая или уменьшая пуск пара. В установившемся режиме каждому положению регулируемого органа соответствует определенное значение частоты вращения, т. е. рассмотренный регулятор функционирует по закону статического регулирования.
В качестве рабочей жидкости используется масло или невоспламеняемая жидкость. В золотнике – двухтарельчатый поршень. В сливной линии давление равно атмосферному. Правые окна в буксе соединены с верхним и нижним полостями двигателя. Сам двигатель состоит из поршня и штока. По принципу действия ГД интегрирует управляющие воздействия: W(P)=1/TДР. ГД, снабженный механизмом выключения (ЖОС), превращается в гидроусилитель с передаточной функцией инерционного звена: W(P)=1/(TДР+1). Поршень в нейтральном состоянии не может перемещаться из-за давления пара вследствие несжимаемости жидкости. При отклонении частоты двигается муфта и передвигает поршень тарелок золотника, вследствие этого в какую-то часть двигателя подается повышенное давление, следовательно, поршень перемещается, увеличивая или уменьшая пуск пара. В установившемся режиме каждому положению регулируемого органа соответствует определенное значение частоты вращения, т. е. рассмотренный регулятор функционирует по закону статического регулирования.
 гидромеханическом и 2) гидродинамическом принципах действия") Для ПТ большой мощности АРЧВ выполняют на 1) гидромеханическом и 2) гидродинамическом принципах действия (являются частью механизмов турбин). Регуляторы выполняют функцию статического регулирования с Кст =(4 -6)%. Коэффициент статизма меняется при изменении мощности турбины: Повышение коэффициента статизма при малых мощностях нагрузки обеспечивает устойчивость в режимах малых нагрузок, когда синхронизирующая мощность генератора мала или отсутствует. Разница гидромеханического и гидродинамического регулятора заключается в исполнении связи между маятником и гидроусилителем: у первого эта связь механическая (рычажная), у второго – при помощи жидкости.
Для ПТ большой мощности АРЧВ выполняют на 1) гидромеханическом и 2) гидродинамическом принципах действия (являются частью механизмов турбин). Регуляторы выполняют функцию статического регулирования с Кст =(4 -6)%. Коэффициент статизма меняется при изменении мощности турбины: Повышение коэффициента статизма при малых мощностях нагрузки обеспечивает устойчивость в режимах малых нагрузок, когда синхронизирующая мощность генератора мала или отсутствует. Разница гидромеханического и гидродинамического регулятора заключается в исполнении связи между маятником и гидроусилителем: у первого эта связь механическая (рычажная), у второго – при помощи жидкости.
 Гидродинамический регулятор частоты вращения Применяется для паровых турбин средней и большой мощности. Здесь перемещение муфты преобразуется в изменение давления рабочей жидкости в импульсной линии 1 (ИЛ 1) - Р. Под действием изменившегося давления происходит перемещение поршня гидроусилителя ГУ 1 и, следовательно, к изменению давления в ИЛ 2 второго каскада, воздействующего на гидроусилитель, установленный на регулирующих клапанах турбины. На ПТ большой мощности с промперегревом пара АРЧВ дополняют электроприставкой, которая через электрогидравлический преобразователь (ЭГП) подключается к импульсной линии ИЛ 1.
Гидродинамический регулятор частоты вращения Применяется для паровых турбин средней и большой мощности. Здесь перемещение муфты преобразуется в изменение давления рабочей жидкости в импульсной линии 1 (ИЛ 1) - Р. Под действием изменившегося давления происходит перемещение поршня гидроусилителя ГУ 1 и, следовательно, к изменению давления в ИЛ 2 второго каскада, воздействующего на гидроусилитель, установленный на регулирующих клапанах турбины. На ПТ большой мощности с промперегревом пара АРЧВ дополняют электроприставкой, которая через электрогидравлический преобразователь (ЭГП) подключается к импульсной линии ИЛ 1.
 ИЛ – Импульсная линия ЭГП – Электрогидравлический преобразователь ЭП – Электроприставка
ИЛ – Импульсная линия ЭГП – Электрогидравлический преобразователь ЭП – Электроприставка
 Наличие ЭП позволяет формировать управляющие сигналы не только по отклонению частоты, но и по производной по частоте (по ускорению), вводить другие параметры регулирования (по давлению свежего пара). Кроме того осуществляется: • Аварийное закрытие клапанов при ОГ; • Аварийное регулирование мощности турбины для сохранения динамической устойчивости; • Ограничение мощности по условию обеспечения статической устойчивости в послеаварийном режиме (реализация управляющих воздействия противоаварийной автоматики); • Автоматическое изменение статизма.
Наличие ЭП позволяет формировать управляющие сигналы не только по отклонению частоты, но и по производной по частоте (по ускорению), вводить другие параметры регулирования (по давлению свежего пара). Кроме того осуществляется: • Аварийное закрытие клапанов при ОГ; • Аварийное регулирование мощности турбины для сохранения динамической устойчивости; • Ограничение мощности по условию обеспечения статической устойчивости в послеаварийном режиме (реализация управляющих воздействия противоаварийной автоматики); • Автоматическое изменение статизма.
 Используются на ГТ. Практика показала их высокую чувствительность, надежность, возможность реализовать") Электрогидравлические регуляторы (ЭГР) Используются на ГТ. Практика показала их высокую чувствительность, надежность, возможность реализовать различные законы регулирования. Существуют ЭГР различных модификаций: • Изодромные (обеспечивает астатический закон регулирования) регуляторы с гибкой и жесткой обратной связью по положению главного или вспомогательного гидродвигателя. • Регуляторы с воздействием по отклонению частоты и ее производных (ПД-регуляторы). • Регулятор с воздействием по отклонению частоты и изменению интегральной функции от отклонения частоты (ПИ-регуляторы). • Регулятор, использующий отклонение частоты, её производной и интегральную функцию по отклонению частоты (ПИДрегуляторы). В ЭГР все функциональные элементы выполнены на электрическом принципе. Усилители – гидромеханические, расположенные в ГМК. Связь между панелью электрооборудования и ГМК осуществляется с помощью ЭГП.
Электрогидравлические регуляторы (ЭГР) Используются на ГТ. Практика показала их высокую чувствительность, надежность, возможность реализовать различные законы регулирования. Существуют ЭГР различных модификаций: • Изодромные (обеспечивает астатический закон регулирования) регуляторы с гибкой и жесткой обратной связью по положению главного или вспомогательного гидродвигателя. • Регуляторы с воздействием по отклонению частоты и ее производных (ПД-регуляторы). • Регулятор с воздействием по отклонению частоты и изменению интегральной функции от отклонения частоты (ПИ-регуляторы). • Регулятор, использующий отклонение частоты, её производной и интегральную функцию по отклонению частоты (ПИДрегуляторы). В ЭГР все функциональные элементы выполнены на электрическом принципе. Усилители – гидромеханические, расположенные в ГМК. Связь между панелью электрооборудования и ГМК осуществляется с помощью ЭГП.
 Упрощенная функциональная схема ПИД-регулятора типа ЭГР-И.
Упрощенная функциональная схема ПИД-регулятора типа ЭГР-И.
 Информация о частоте поступает на схему от тахогенератора GH, вращающегося с синхронной скоростью с генератором 1 – Измерительный орган отклонения частоты (двойной Тобразный мост, RC-контур). 2 – Фазочувствительный выпрямитель. 3 – Дифференциатор (из отклонения формирует производную); 4 – Сумматор, где суммируются сигналы, пропорциональные f, f , предписывающего сигнала от МИЧ, сигналов ОС от интегратора 5. 5 – Интегральный усилитель (интегратор охваченный гибкой и жесткой отрицательной обратной связью). 7 – Жесткая ОС (обеспечивает требуемый статизм регулирования). 8, 6 – Гибкая ОС. 9 - Сумматор, где суммируются сигналы постоянного тока от усилителя 5, предписывающие сигналы от МИМ, сигналы от устройства ГРАМ и сигналы ООС по положению гидравлического двигателя направляющего аппарата в ГМК.
Информация о частоте поступает на схему от тахогенератора GH, вращающегося с синхронной скоростью с генератором 1 – Измерительный орган отклонения частоты (двойной Тобразный мост, RC-контур). 2 – Фазочувствительный выпрямитель. 3 – Дифференциатор (из отклонения формирует производную); 4 – Сумматор, где суммируются сигналы, пропорциональные f, f , предписывающего сигнала от МИЧ, сигналов ОС от интегратора 5. 5 – Интегральный усилитель (интегратор охваченный гибкой и жесткой отрицательной обратной связью). 7 – Жесткая ОС (обеспечивает требуемый статизм регулирования). 8, 6 – Гибкая ОС. 9 - Сумматор, где суммируются сигналы постоянного тока от усилителя 5, предписывающие сигналы от МИМ, сигналы от устройства ГРАМ и сигналы ООС по положению гидравлического двигателя направляющего аппарата в ГМК.
 10 – Усилитель/Преобразователь мощности, работает как электромеханическая следящая система с выходным 2 -фазным асинхронным двигателем и ООС (сельсин BG 3, работающий в трансформаторном режиме). 11 - фазочувствительный выпрямитель. С валом ЭД жестко связан золотник гидроусилителя ГМК. МИЧ и МИМ выполнены с помощью сельсинов BG 1 и BG 2, работающих в трансформаторном режиме, имеют дистанционное управление (М 1 и М 2). Пропорционально-интегральный-дифференциальный закон регулирования обеспечивает лучший процесс регулирования частоты и мощности. = / ном - относительное отклонение по частоте; = D/Dном – относительное приращение расхода энергоносителя; Тп – постоянная времени цепи ускорения; Тd – постоянная времени цепи ГОС; ТS – постоянная времени интегрирующего усилителя; d – коэффициент усиления звена ГОС; - коэффициент передачи ЖОС.
10 – Усилитель/Преобразователь мощности, работает как электромеханическая следящая система с выходным 2 -фазным асинхронным двигателем и ООС (сельсин BG 3, работающий в трансформаторном режиме). 11 - фазочувствительный выпрямитель. С валом ЭД жестко связан золотник гидроусилителя ГМК. МИЧ и МИМ выполнены с помощью сельсинов BG 1 и BG 2, работающих в трансформаторном режиме, имеют дистанционное управление (М 1 и М 2). Пропорционально-интегральный-дифференциальный закон регулирования обеспечивает лучший процесс регулирования частоты и мощности. = / ном - относительное отклонение по частоте; = D/Dном – относительное приращение расхода энергоносителя; Тп – постоянная времени цепи ускорения; Тd – постоянная времени цепи ГОС; ТS – постоянная времени интегрирующего усилителя; d – коэффициент усиления звена ГОС; - коэффициент передачи ЖОС.
 Параллельная работа агрегатов снабженных АРЧВ ПТ имеют астатичекий закон регулирования, ГТ в большинстве снабжены изодромным механизмом, который обеспечивает астатический закон регулирования частоты. Проблема заключается в распределении активной мощности. Если уставка одного агрегата немного больше fу1>fном , то при астатическом регулировании АРЧВ этого агрегата будет увеличивать количество энергоносителя и брать на себя нагрузку, пока не будет исчерпан регулировочный диапазон. В автономной энергосистеме это приведет к повышению частоты в системе и разгрузке других агрегатов (fу2
Параллельная работа агрегатов снабженных АРЧВ ПТ имеют астатичекий закон регулирования, ГТ в большинстве снабжены изодромным механизмом, который обеспечивает астатический закон регулирования частоты. Проблема заключается в распределении активной мощности. Если уставка одного агрегата немного больше fу1>fном , то при астатическом регулировании АРЧВ этого агрегата будет увеличивать количество энергоносителя и брать на себя нагрузку, пока не будет исчерпан регулировочный диапазон. В автономной энергосистеме это приведет к повышению частоты в системе и разгрузке других агрегатов (fу2
 Рассмотрим параллельную работу двух агрегатов с разными Кст и одинаковыми уставками по частоте. В установившемся режиме при f 1 имеем Р 1' и Р 2'. Нагрузка возрастает на , а частота снизилась на f. Из определения: , получим для каждого агрегата: Или:
Рассмотрим параллельную работу двух агрегатов с разными Кст и одинаковыми уставками по частоте. В установившемся режиме при f 1 имеем Р 1' и Р 2'. Нагрузка возрастает на , а частота снизилась на f. Из определения: , получим для каждого агрегата: Или:
 мощности") ; При параллельной работе агрегатов в автономной энергосистеме соотношение между суммарным увеличением (уменьшением) мощности этой системы РС и отклонением по частоте f. C будет определяться средневзвешенным КСТ. (1) Здесь При изменении частоты на f. C изменится нагрузка всех агрегатов в соответствии с их коэффициентами статизма и номинальной мощностью, то есть:
; При параллельной работе агрегатов в автономной энергосистеме соотношение между суммарным увеличением (уменьшением) мощности этой системы РС и отклонением по частоте f. C будет определяться средневзвешенным КСТ. (1) Здесь При изменении частоты на f. C изменится нагрузка всех агрегатов в соответствии с их коэффициентами статизма и номинальной мощностью, то есть:
, средневзвешенный КСТ Средневзвешенный КСТ в автономной энергосистеме не постоянная величина,") Тогда, учитывая выражение (1), средневзвешенный КСТ Средневзвешенный КСТ в автономной энергосистеме не постоянная величина, а зависящая от степени загрузки агрегатов. По мере роста нагрузки энергосистемы начинает исчерпываться регулировочный диапазона отдельных агрегатов, и коэффициент статизма таких агрегатов будет стремиться к бесконечности. При этом средневзвешенный КСТ начнет увеличиваться (знаменатель приведенного выражения уменьшается).
Тогда, учитывая выражение (1), средневзвешенный КСТ Средневзвешенный КСТ в автономной энергосистеме не постоянная величина, а зависящая от степени загрузки агрегатов. По мере роста нагрузки энергосистемы начинает исчерпываться регулировочный диапазона отдельных агрегатов, и коэффициент статизма таких агрегатов будет стремиться к бесконечности. При этом средневзвешенный КСТ начнет увеличиваться (знаменатель приведенного выражения уменьшается).
 При определении изменения мощности системы РС при отклонении частоты недостаточно учитывать только средневзвешенный коэффициент статизма. Необходимо учитывать также и регулирующий коэффициент нагрузки (Кн) и соотношение номинальных мощностей нагрузки и генераторов. Вводя коэффициент резерва: Тогда связь между РС и f. С будет выглядеть При снижении частоты (знак f* - минус) мощность энергосистемы возросла бы в соответствии с первым слагаемым выражения, но изза наличия РЭН это приращение будет меньше на величину, определяемую вторым слагаемым, т. к. частота в системе все-таки снизилась.
При определении изменения мощности системы РС при отклонении частоты недостаточно учитывать только средневзвешенный коэффициент статизма. Необходимо учитывать также и регулирующий коэффициент нагрузки (Кн) и соотношение номинальных мощностей нагрузки и генераторов. Вводя коэффициент резерва: Тогда связь между РС и f. С будет выглядеть При снижении частоты (знак f* - минус) мощность энергосистемы возросла бы в соответствии с первым слагаемым выражения, но изза наличия РЭН это приращение будет меньше на величину, определяемую вторым слагаемым, т. к. частота в системе все-таки снизилась.
 В случае исчерпания регулирующего диапазона всех турбин Изменение мощности системы - только за счет РЭН. Полученные выражения приведены для идеальных статических характеристик. Реальные статические характеристики имеют зону нечувствительности. Есть зона нечувствительности по f, есть зона неопределенности по P.
В случае исчерпания регулирующего диапазона всех турбин Изменение мощности системы - только за счет РЭН. Полученные выражения приведены для идеальных статических характеристик. Реальные статические характеристики имеют зону нечувствительности. Есть зона нечувствительности по f, есть зона неопределенности по P.
 Ширина зоны нечувствительности оценивается коэффициентом нечувствительности в о. е. или в %: КНЧ= fнч/fном. Наличие зоны нечувствительности обуславливает неопределенность нагрузки агрегата при данном значении частоты РНП*. Как видим, РНП* и КНЧ зависят друг от друга и их отношение равно коэффициенту статизма: Это позволяет оценить зону неопределенности при заданном КСТ и КНЧ. Обычно для ПТ КНЧ 0, 3%, КСТ = 3 – 6 %. Тогда:
Ширина зоны нечувствительности оценивается коэффициентом нечувствительности в о. е. или в %: КНЧ= fнч/fном. Наличие зоны нечувствительности обуславливает неопределенность нагрузки агрегата при данном значении частоты РНП*. Как видим, РНП* и КНЧ зависят друг от друга и их отношение равно коэффициенту статизма: Это позволяет оценить зону неопределенности при заданном КСТ и КНЧ. Обычно для ПТ КНЧ 0, 3%, КСТ = 3 – 6 %. Тогда:
 Автоматическое регулирование частоты, активной мощности и перетоков по транзитам в энергосистемах (АРЧи. М в ОЭС) Назначение. Стандартом на качество электрической энергии в энергосистеме должна поддерживаться fном=50 Гц ( 0, 1 Гц). Допускается временная работа на 10 -и минутном интервале с отклонением частоты 0, 2 Гц, при этом расхождение между астрономическим и синхронным временем не должно превышать 2 минут за сутки. Это влечет снижение производительности, перерасход эл. Энергии. При снижении частоты диспетчер обязан ввести в действие имеющиеся резервы мощности. В ОЭС при наличии резерва мощности основной задачей становится обеспечение (при требуемой точности поддержания номинальной частоты) наиболее экономичного распределения нагрузок между параллельно работающими агрегатами, а также поддерживать заданный диспетчерским графиком переток мощности между энергосистемами. Таким образом, на АРЧи. М возлагается:
Автоматическое регулирование частоты, активной мощности и перетоков по транзитам в энергосистемах (АРЧи. М в ОЭС) Назначение. Стандартом на качество электрической энергии в энергосистеме должна поддерживаться fном=50 Гц ( 0, 1 Гц). Допускается временная работа на 10 -и минутном интервале с отклонением частоты 0, 2 Гц, при этом расхождение между астрономическим и синхронным временем не должно превышать 2 минут за сутки. Это влечет снижение производительности, перерасход эл. Энергии. При снижении частоты диспетчер обязан ввести в действие имеющиеся резервы мощности. В ОЭС при наличии резерва мощности основной задачей становится обеспечение (при требуемой точности поддержания номинальной частоты) наиболее экономичного распределения нагрузок между параллельно работающими агрегатами, а также поддерживать заданный диспетчерским графиком переток мощности между энергосистемами. Таким образом, на АРЧи. М возлагается:
; -") - поддержание частоты в ЭС на уровне 50 Гц ( 0, 1 Гц); - экономичное распределение нагрузки между параллельно работающими агрегатами; - регулирование (или ограничение) перетоков при наличии слабых межсистемных или внутрисистемных связей. Состав АРЧи. М. 1. Первичные регуляторы частоты вращения – предназначены для поддержания требуемого режима работы агрегата (Г-Т) при изменении электрической нагрузки путем изменения в соответствии с этой нагрузкой количества вводимого в турбину энергоносителя. 2. Устройства вторичного регулирования – позволяют поддерживать (при наличии регулировочного диапазона) частоту на неизменном уровне при любой нагрузке. Они воздействуют на первичный регулятор, изменяя его уставку через МУТ, при колебаниях частоты, изменении загрузки генератора. Устройства работают совместно с устройствами группового управления выработкой активной мощности многоагрегатной станции.
- поддержание частоты в ЭС на уровне 50 Гц ( 0, 1 Гц); - экономичное распределение нагрузки между параллельно работающими агрегатами; - регулирование (или ограничение) перетоков при наличии слабых межсистемных или внутрисистемных связей. Состав АРЧи. М. 1. Первичные регуляторы частоты вращения – предназначены для поддержания требуемого режима работы агрегата (Г-Т) при изменении электрической нагрузки путем изменения в соответствии с этой нагрузкой количества вводимого в турбину энергоносителя. 2. Устройства вторичного регулирования – позволяют поддерживать (при наличии регулировочного диапазона) частоту на неизменном уровне при любой нагрузке. Они воздействуют на первичный регулятор, изменяя его уставку через МУТ, при колебаниях частоты, изменении загрузки генератора. Устройства работают совместно с устройствами группового управления выработкой активной мощности многоагрегатной станции.
 Устройства группового управления позволяют рассматривать ЭС как один объект, на который может воздействовать регулятор-задатчик, определяющий участие всей ЭС в общей системе регулирования f и Р. В связи с этим, можно выделить: 1) устройства внутристанционного группового управления, обеспечивающие наиболее экономичное распределение нагрузки между отдельными агрегатами (по равенству относительных приростов расхода топлива на выработку энергии); 2) устройства системного регулирования – воздействуют через системы управления на задатчики УГУ мощности Эл. Ст, обеспечивая требуемое регулирование частоты, мощности и перетоков мощности в энергосистеме и её частях. Здесь также возможны варианты. При централизованной системе АРЧи. М – выработку команд, воздействующих на задатчики Эл. Ст, привлеченных к регулированию, производит центральный регулятор системы. Вводимая информация и закон регулирования устанавливается заранее, воздействие на задатчики УГУ Эл. Ст осуществляются средствами телемеханики.
Устройства группового управления позволяют рассматривать ЭС как один объект, на который может воздействовать регулятор-задатчик, определяющий участие всей ЭС в общей системе регулирования f и Р. В связи с этим, можно выделить: 1) устройства внутристанционного группового управления, обеспечивающие наиболее экономичное распределение нагрузки между отдельными агрегатами (по равенству относительных приростов расхода топлива на выработку энергии); 2) устройства системного регулирования – воздействуют через системы управления на задатчики УГУ мощности Эл. Ст, обеспечивая требуемое регулирование частоты, мощности и перетоков мощности в энергосистеме и её частях. Здесь также возможны варианты. При централизованной системе АРЧи. М – выработку команд, воздействующих на задатчики Эл. Ст, привлеченных к регулированию, производит центральный регулятор системы. Вводимая информация и закон регулирования устанавливается заранее, воздействие на задатчики УГУ Эл. Ст осуществляются средствами телемеханики.
экономичное распределение нагрузок между агрегатами достигается путем") При смешанной системе АРЧи. М (применяется в ОЭС)экономичное распределение нагрузок между агрегатами достигается путем реализации заранее запланированного графика, отрабатываемого в каждой энергосистеме станционными задатчиками УГУ. Но есть внеплановые отклонения нагрузки (составляют 2 -3%). Однако эти отклонения вызывают изменение запланированных перетоков по транзитам и отклонение частоты. Корректировка этих параметров возлагается на центральный регулятор, воздействующий на ограниченное число станций (иногда – на одну мощную ГЭС). Такая ГЭС является частотно-регулирующей. Закон регулирования частоты и перетоков определяется выражением:
При смешанной системе АРЧи. М (применяется в ОЭС)экономичное распределение нагрузок между агрегатами достигается путем реализации заранее запланированного графика, отрабатываемого в каждой энергосистеме станционными задатчиками УГУ. Но есть внеплановые отклонения нагрузки (составляют 2 -3%). Однако эти отклонения вызывают изменение запланированных перетоков по транзитам и отклонение частоты. Корректировка этих параметров возлагается на центральный регулятор, воздействующий на ограниченное число станций (иногда – на одну мощную ГЭС). Такая ГЭС является частотно-регулирующей. Закон регулирования частоты и перетоков определяется выражением:
 Здесь: Р – мощность, отрабатываемая регулирующей электростанцией; РПЛ. – плановая мощность электростанции, оптимальная при отсутствии отклонений нагрузки от прогнозируемой; f – отклонение частоты от номинальной; Рпер. – отклонение перетоков от планового значения; К, С – коэффициенты регулирования, определяют долевое участие электростанции в покрытии нагрузки. АРЧи. М по мнимо-статическим характеристикам АРЧВ регулируют частоту с заданным Кст. Чем выше нагрузка, тем меньше частота в системе. Но есть требование по нормируемому отклонению частоты - f 0, 2%. Требуется астатическое регулирование путем изменения уставки АРЧВ – перемещением статической характеристики, т. е. изменением предписанного значения мощности (Рпр. ) в законе статического регулирования:
Здесь: Р – мощность, отрабатываемая регулирующей электростанцией; РПЛ. – плановая мощность электростанции, оптимальная при отсутствии отклонений нагрузки от прогнозируемой; f – отклонение частоты от номинальной; Рпер. – отклонение перетоков от планового значения; К, С – коэффициенты регулирования, определяют долевое участие электростанции в покрытии нагрузки. АРЧи. М по мнимо-статическим характеристикам АРЧВ регулируют частоту с заданным Кст. Чем выше нагрузка, тем меньше частота в системе. Но есть требование по нормируемому отклонению частоты - f 0, 2%. Требуется астатическое регулирование путем изменения уставки АРЧВ – перемещением статической характеристики, т. е. изменением предписанного значения мощности (Рпр. ) в законе статического регулирования:
 Такая система регулирования – вторичная СРЧ. Статические характеристики предназначены для распределения мощности между агрегатами, но распределение мощности между параллельно работающими агрегатами в соответствии с их КСТ часто бывает не оптимальным. Поэтому и эту задачу часто возлагают на вторичные системы регулирования. Для поддержания частоты на неизменном уровне используется специально выделенная станция (или группа станций) – частотнорегулирующие ЭС, обладающие достаточно большим регулировочным диапазоном и способные развивать любую мощность в этом диапазоне. Проще иметь одну ЧРЭС. Основная проблема – распределение нагрузки между параллельно работающими агрегатами. Это может быть по Кст или осуществляться принудительно общестанционным устройством по общему для всех агрегатов параметру распределения. В качестве общего параметра распределения используется суммарная мощность станции (другой способ АРЧи. М использует интегральную функцию отклонения частоты).
Такая система регулирования – вторичная СРЧ. Статические характеристики предназначены для распределения мощности между агрегатами, но распределение мощности между параллельно работающими агрегатами в соответствии с их КСТ часто бывает не оптимальным. Поэтому и эту задачу часто возлагают на вторичные системы регулирования. Для поддержания частоты на неизменном уровне используется специально выделенная станция (или группа станций) – частотнорегулирующие ЭС, обладающие достаточно большим регулировочным диапазоном и способные развивать любую мощность в этом диапазоне. Проще иметь одну ЧРЭС. Основная проблема – распределение нагрузки между параллельно работающими агрегатами. Это может быть по Кст или осуществляться принудительно общестанционным устройством по общему для всех агрегатов параметру распределения. В качестве общего параметра распределения используется суммарная мощность станции (другой способ АРЧи. М использует интегральную функцию отклонения частоты).
 агрегатов формируется по следующему закону: ;") При таком способе регулирующее воздействие на МУТ (МИЧВ) агрегатов формируется по следующему закону: ; ; . - мощность вырабатываемая i-м агрегатом, - коэффициент долевого участия i-го агрегата в покрытии общей суммарной нагрузки станции,
При таком способе регулирующее воздействие на МУТ (МИЧВ) агрегатов формируется по следующему закону: ; ; . - мощность вырабатываемая i-м агрегатом, - коэффициент долевого участия i-го агрегата в покрытии общей суммарной нагрузки станции,
 - текущая мощность всей станции. Естественно, для обеспечения астатического закона регулирования должно выполняться условие Если это условие не выполняется, регулирование будет по статическому закону.
- текущая мощность всей станции. Естественно, для обеспечения астатического закона регулирования должно выполняться условие Если это условие не выполняется, регулирование будет по статическому закону.
 Структурная схема вторичного регулирования Чи. М по мнимостатическим характеристикам
Структурная схема вторичного регулирования Чи. М по мнимостатическим характеристикам
 ИПМ – Измерительный преобразователь мощности ИЭ – Исполнительный элемент (формирует выходные сигналы, обеспечивающие реверсивную работу МУТ) УРАМ – устройство распределения активной мощности (меняя можно по разному распределить мощность между агрегатами) Регулирующее воздействие, созданное в соответствии с уравнениями, реализуется через ИЭ (исполнительный элемент), который обеспечивает реверсивную работу двигателя МИЧВ. При возникновении небаланса мощности возникает отклонение частоты f= f – fном и создается регулирующее воздействие (К f) – на изменение развиваемой мощности турбиной.
ИПМ – Измерительный преобразователь мощности ИЭ – Исполнительный элемент (формирует выходные сигналы, обеспечивающие реверсивную работу МУТ) УРАМ – устройство распределения активной мощности (меняя можно по разному распределить мощность между агрегатами) Регулирующее воздействие, созданное в соответствии с уравнениями, реализуется через ИЭ (исполнительный элемент), который обеспечивает реверсивную работу двигателя МИЧВ. При возникновении небаланса мощности возникает отклонение частоты f= f – fном и создается регулирующее воздействие (К f) – на изменение развиваемой мощности турбиной.
 При этом изменится и Рi , а, следовательно, изменится предписанное значение мощности i-го агрегата Рпр. i= i Рi и развиваемая мощность (Рi ) каждого агрегата. Изменение суммарной мощности всей станции приводит к исчезновению мощности небаланса и восстановлению частоты (при этом Кf f =0 – исчезает регулирующее воздействие). Перестает изменяться суммарная мощность и предписанная мощность, чем и обеспечивается астатическое регулирование частоты: при Рi =Pпр. i исчезает регулирующее воздействие, созданное их неравенством. Распределение суммарной нагрузки между агрегатами получается принудительно по коэффициентам долевого участия I , а статизм по частоте исчезает (отсюда название – "регулирование по мнимому или исчезающему статизму"). Это видно наглядно, если просуммировать уравнения, поделив слагаемые уравнений на Кsi: f (Кf, /Ks, i) + Рi - i Pi =0. Поскольку i=1, то сумма развиваемой агрегатами мощности равна суммарной мощности станции, т. е. последние два члена исчезают, тогда: f (Кf, /Ks, i) =0, что возможно только при f=0.
При этом изменится и Рi , а, следовательно, изменится предписанное значение мощности i-го агрегата Рпр. i= i Рi и развиваемая мощность (Рi ) каждого агрегата. Изменение суммарной мощности всей станции приводит к исчезновению мощности небаланса и восстановлению частоты (при этом Кf f =0 – исчезает регулирующее воздействие). Перестает изменяться суммарная мощность и предписанная мощность, чем и обеспечивается астатическое регулирование частоты: при Рi =Pпр. i исчезает регулирующее воздействие, созданное их неравенством. Распределение суммарной нагрузки между агрегатами получается принудительно по коэффициентам долевого участия I , а статизм по частоте исчезает (отсюда название – "регулирование по мнимому или исчезающему статизму"). Это видно наглядно, если просуммировать уравнения, поделив слагаемые уравнений на Кsi: f (Кf, /Ks, i) + Рi - i Pi =0. Поскольку i=1, то сумма развиваемой агрегатами мощности равна суммарной мощности станции, т. е. последние два члена исчезают, тогда: f (Кf, /Ks, i) =0, что возможно только при f=0.
 Этот метод удобно использовать для ГЭС с однотипными агрегатами. Если агрегаты однотипные, то предписанная мощность т. е. Для ТЭС: Для ГЭС: , если характеристики относительных приростов (ХОП) одинаковые, то такое распределение по средней мощности дает оптимальный режим работы. B-часовой расход топлива, D – производительность парогенератора. Q – расход воды, РТ –мощность, развиваемая турбиной. Оптимальное распределение нагрузки между параллельно работающими агрегатами по критерию равенства относительных приростов расхода воды: q 1=q 2= qi=qn.
Этот метод удобно использовать для ГЭС с однотипными агрегатами. Если агрегаты однотипные, то предписанная мощность т. е. Для ТЭС: Для ГЭС: , если характеристики относительных приростов (ХОП) одинаковые, то такое распределение по средней мощности дает оптимальный режим работы. B-часовой расход топлива, D – производительность парогенератора. Q – расход воды, РТ –мощность, развиваемая турбиной. Оптимальное распределение нагрузки между параллельно работающими агрегатами по критерию равенства относительных приростов расхода воды: q 1=q 2= qi=qn.
 Регулирование по этому методу на ГЭС может быть и без вторичной системы регулирования частоты – первичными регуляторами, поскольку они снабжены изодромным устройством и могут работать с нулевым статизмом. Для такого регулирования ЭГРы снабжались устройством для распределения нагрузки по среднему открытию направляющих аппаратов турбин и устройством группового регулирования Чи. М всеми параллельно работающими агрегатами по суммарному открытию НА турбин. Однако схемы уравнивания нагрузок по среднему значению не всегда соответствуют оптимальному режиму. Поэтому в н. в. разработаны схемы группового регулирования Чи. М с индивидуальным (радиальным) заданием предписанной мощности или по среднему значению, или в соответствии с характеристиками относительных приростов агрегатов.
Регулирование по этому методу на ГЭС может быть и без вторичной системы регулирования частоты – первичными регуляторами, поскольку они снабжены изодромным устройством и могут работать с нулевым статизмом. Для такого регулирования ЭГРы снабжались устройством для распределения нагрузки по среднему открытию направляющих аппаратов турбин и устройством группового регулирования Чи. М всеми параллельно работающими агрегатами по суммарному открытию НА турбин. Однако схемы уравнивания нагрузок по среднему значению не всегда соответствуют оптимальному режиму. Поэтому в н. в. разработаны схемы группового регулирования Чи. М с индивидуальным (радиальным) заданием предписанной мощности или по среднему значению, или в соответствии с характеристиками относительных приростов агрегатов.
 АРЧи. М по интегральной функции отклонения частоты Для распределения нагрузок используется измерительный орган отклонения частоты (ИОЧ), формируется f = f – f. У, по этому отклонению формируется интегральная функция по отклонению частоты f t 0 - момент возникновения отклонения частоты; t 1 - момент исчезновения этого сигнала; К – коэффициент пропорциональности. Для оптимального распределения нагрузок между агрегатами по равенству относительных приростов расхода энергоносителя эта функция f должна быть преобразована в предписанное значение мощности агрегата Рпр. i.
АРЧи. М по интегральной функции отклонения частоты Для распределения нагрузок используется измерительный орган отклонения частоты (ИОЧ), формируется f = f – f. У, по этому отклонению формируется интегральная функция по отклонению частоты f t 0 - момент возникновения отклонения частоты; t 1 - момент исчезновения этого сигнала; К – коэффициент пропорциональности. Для оптимального распределения нагрузок между агрегатами по равенству относительных приростов расхода энергоносителя эта функция f должна быть преобразована в предписанное значение мощности агрегата Рпр. i.
 В этом случае интегральная функция f используется как мера относительного прироста, а значение Рпр. i определяется функциональным преобразованием характеристики относительного прироста агрегата по выражению: В соответствии с этой функцией имеем оптимальное значение Рпр. i – в соответствии с ХОП каждого агрегата. Регулирующее воздействие на МИЧВ каждого из n- агрегатов формируется по выражению:
В этом случае интегральная функция f используется как мера относительного прироста, а значение Рпр. i определяется функциональным преобразованием характеристики относительного прироста агрегата по выражению: В соответствии с этой функцией имеем оптимальное значение Рпр. i – в соответствии с ХОП каждого агрегата. Регулирующее воздействие на МИЧВ каждого из n- агрегатов формируется по выражению:
 Для определения Рпр. i по ХОП i-го агрегата служит устройство УРАМ, в котором формируется интегральная функция f и происходит её функциональное преобразование в Рпр. i. На каждом из n-выходов УРАМ фиксируется Рпр. i. Аналогично этот способ обеспечивает астатическое регулирование частоты и оптимальное распределение нагрузки. Наиболее часто используется на ТЭС, где может быть разнотипное оборудование, оборудование разной мощности.
Для определения Рпр. i по ХОП i-го агрегата служит устройство УРАМ, в котором формируется интегральная функция f и происходит её функциональное преобразование в Рпр. i. На каждом из n-выходов УРАМ фиксируется Рпр. i. Аналогично этот способ обеспечивает астатическое регулирование частоты и оптимальное распределение нагрузки. Наиболее часто используется на ТЭС, где может быть разнотипное оборудование, оборудование разной мощности.
 Для функционального преобразования интегральной функции в соответствии с ХОП агрегата использовались линейные и нелинейные потенциометры и шаблоны ХОП. Сейчас разработаны аналоговые и цифровые интеграторы и функциональные преобразователи. Особенности АСРЧи. М на ТЭЦ. 1. Для ТЭЦ распределение нагрузки между агрегатами котельного цеха и турбинного цеха производятся по разным критериям, поэтому АСРЧи. М для них должны иметь отдельные УРАМ (для котельного и турбинного цеха). Для блочных станций – достаточно одного. 2. Для ТЭС необходимо одновременно регулировать как нагрузку турбины, так и нагрузку парогенератора (t 0, давление пара). А их динамические свойства разные. Это предъявляет дополнительные требования к АСРЧи. М. Например, регулирующее воздействие от АСРЧи. М подается на систему регулирования парогенератора, а регулирующее воздействие на АРЧВ турбины корректируется по давлению пара.
Для функционального преобразования интегральной функции в соответствии с ХОП агрегата использовались линейные и нелинейные потенциометры и шаблоны ХОП. Сейчас разработаны аналоговые и цифровые интеграторы и функциональные преобразователи. Особенности АСРЧи. М на ТЭЦ. 1. Для ТЭЦ распределение нагрузки между агрегатами котельного цеха и турбинного цеха производятся по разным критериям, поэтому АСРЧи. М для них должны иметь отдельные УРАМ (для котельного и турбинного цеха). Для блочных станций – достаточно одного. 2. Для ТЭС необходимо одновременно регулировать как нагрузку турбины, так и нагрузку парогенератора (t 0, давление пара). А их динамические свойства разные. Это предъявляет дополнительные требования к АСРЧи. М. Например, регулирующее воздействие от АСРЧи. М подается на систему регулирования парогенератора, а регулирующее воздействие на АРЧВ турбины корректируется по давлению пара.
 Автоматическое регулирование и ограничение перетоков активной мощности Объединение ЭЭС в ОЭС дает возможность реализовать межсистемный эффект, заключающийся в оптимальном использовании установленной мощности ЭС. Положительный эффект ОЭС: 1. Проявление нагрузочного эффекта, обусловленного несовпадением максимумов нагрузок в ЭЭС, расположенных в разных часовых поясах (график нагрузки усредняется). 2. Снижение необходимого запаса аварийного резерва в каждой из энергосистем. Передающие мощность линии в ЭЭС и ВЛ-связи в ОЭС рассчитываются на определенную максимальную мощность. При росте мощности ЭЭС некоторые внутрисистемные связи переходят в разряд «слабых» связей и могут перегружаться при изменении нагрузки отдельных ЭЭС. Даже незначительное отклонение f в ОЭС может привести к большим Рпер. и к нарушению статической устойчивости.
Автоматическое регулирование и ограничение перетоков активной мощности Объединение ЭЭС в ОЭС дает возможность реализовать межсистемный эффект, заключающийся в оптимальном использовании установленной мощности ЭС. Положительный эффект ОЭС: 1. Проявление нагрузочного эффекта, обусловленного несовпадением максимумов нагрузок в ЭЭС, расположенных в разных часовых поясах (график нагрузки усредняется). 2. Снижение необходимого запаса аварийного резерва в каждой из энергосистем. Передающие мощность линии в ЭЭС и ВЛ-связи в ОЭС рассчитываются на определенную максимальную мощность. При росте мощности ЭЭС некоторые внутрисистемные связи переходят в разряд «слабых» связей и могут перегружаться при изменении нагрузки отдельных ЭЭС. Даже незначительное отклонение f в ОЭС может привести к большим Рпер. и к нарушению статической устойчивости.
 Следовательно, возникает задача ограничения перетоков в слабых связях и регулирования перетоков между энергосистемами. Для этого в ЭЭС, входящей в энергообъединение, выделяется электростанция, изменение мощности которой приводит к изменению Рпер. Кроме того, есть необходимость регулирования не только перетоков по отдельным ВЛ, но и обменной мощности между системами. Для этого нужно знать суммарный переток по всем ВЛ, связывающих данную ЭЭС с другими. Для организации АРП или АОП требуются технические средства, фиксирующие мощность перетоков, средства телемеханики, передающие информацию в пункт формирования закона управления режимом работы линии. Затем регулирующее воздействие передается на ЧРЭС. Таким образом, у АСРЧи. М появляется ещё одна функция – АРП и АОП по отдельным линиям связи и обменной мощности в ОЭС.
Следовательно, возникает задача ограничения перетоков в слабых связях и регулирования перетоков между энергосистемами. Для этого в ЭЭС, входящей в энергообъединение, выделяется электростанция, изменение мощности которой приводит к изменению Рпер. Кроме того, есть необходимость регулирования не только перетоков по отдельным ВЛ, но и обменной мощности между системами. Для этого нужно знать суммарный переток по всем ВЛ, связывающих данную ЭЭС с другими. Для организации АРП или АОП требуются технические средства, фиксирующие мощность перетоков, средства телемеханики, передающие информацию в пункт формирования закона управления режимом работы линии. Затем регулирующее воздействие передается на ЧРЭС. Таким образом, у АСРЧи. М появляется ещё одна функция – АРП и АОП по отдельным линиям связи и обменной мощности в ОЭС.
 Можно выделить 2 способа регулирования: 1. АРЧи. М с блокировкой по знаку Рпер. ИПМ – измерительный преобразователь, формирующий знак мощности ( «+» - от шин в линию). С 1 – избыточная, С 2 – дефицитная. Переток мощности имеет разные знаки для С 1 и С 2. Чтобы Рпер. =const, увеличение мощности нагрузки в системе должно покрываться ЧРЭС своей системы.
Можно выделить 2 способа регулирования: 1. АРЧи. М с блокировкой по знаку Рпер. ИПМ – измерительный преобразователь, формирующий знак мощности ( «+» - от шин в линию). С 1 – избыточная, С 2 – дефицитная. Переток мощности имеет разные знаки для С 1 и С 2. Чтобы Рпер. =const, увеличение мощности нагрузки в системе должно покрываться ЧРЭС своей системы.
 Обычно АРП осуществляется совместно с АРЧ, т. к. причина у обоих одна – нарушение баланса мощности. В данном случае в каждой ЭЭС АСРЧи. М дополняется устройством фиксации знака перетока. При такой системе регулирования перетоков регулирующее воздействие на станциях реализуется только в том случае, если Рпер и f совпадают по знаку. Если разные знаки, то не реализуется, следовательно, проходит регулирование в С 2 при увеличении нагрузки в этой системе. 2. Регулирование частоты со статизмом по перетоку мощности. Это есть – совместное регулирование, когда регулирующее воздействие формируется как по отклонению частоты, так и по перетоку мощности по контролируемой линии связи: Здесь КS – коэффициент, определяющий соответствие регулирующих воздействий.
Обычно АРП осуществляется совместно с АРЧ, т. к. причина у обоих одна – нарушение баланса мощности. В данном случае в каждой ЭЭС АСРЧи. М дополняется устройством фиксации знака перетока. При такой системе регулирования перетоков регулирующее воздействие на станциях реализуется только в том случае, если Рпер и f совпадают по знаку. Если разные знаки, то не реализуется, следовательно, проходит регулирование в С 2 при увеличении нагрузки в этой системе. 2. Регулирование частоты со статизмом по перетоку мощности. Это есть – совместное регулирование, когда регулирующее воздействие формируется как по отклонению частоты, так и по перетоку мощности по контролируемой линии связи: Здесь КS – коэффициент, определяющий соответствие регулирующих воздействий.
 Для каждой ЭЭС закон реализуется с учетом знака Рпер. . Здесь при изменении нагрузки в ЭЭСВ регулирующее воздействие по f и Рпер в АСРЧ ЭЭСА будут разнозначны и результирующее воздействие на регуляторы частоты будет минимальным (или при соответствующей настройке – вообще не будет). Наоборот, в АСРЧ ЭЭСВ регулирующие воздействия по f и Рпер будут однозначны и, таким образом, дополнительное приращение нагрузки в ЭЭСВ будет покрыто увеличением мощности турбин ЭЭСВ. Таким образом, изменение нагрузки покрывается в большей степени изменением мощности ЧРЭС той же ЭЭС, в которой произошло изменение нагрузки. Подбирая КS, можно так настроить АСРЧи. М каждой ЭЭС, чтобы приращение нагрузки покрывалось соответствующим приращением генерирующей мощности своей ЧРЭС. В этом заключается принцип автономности при регулировании мощности в ЭЭС. Принцип автономности выполняется при КS=Кст данной системы.
Для каждой ЭЭС закон реализуется с учетом знака Рпер. . Здесь при изменении нагрузки в ЭЭСВ регулирующее воздействие по f и Рпер в АСРЧ ЭЭСА будут разнозначны и результирующее воздействие на регуляторы частоты будет минимальным (или при соответствующей настройке – вообще не будет). Наоборот, в АСРЧ ЭЭСВ регулирующие воздействия по f и Рпер будут однозначны и, таким образом, дополнительное приращение нагрузки в ЭЭСВ будет покрыто увеличением мощности турбин ЭЭСВ. Таким образом, изменение нагрузки покрывается в большей степени изменением мощности ЧРЭС той же ЭЭС, в которой произошло изменение нагрузки. Подбирая КS, можно так настроить АСРЧи. М каждой ЭЭС, чтобы приращение нагрузки покрывалось соответствующим приращением генерирующей мощности своей ЧРЭС. В этом заключается принцип автономности при регулировании мощности в ЭЭС. Принцип автономности выполняется при КS=Кст данной системы.
 Но, как было показано ранее, средневзвешенный коэффициент статизма энергосистемы не есть величина постоянная. Поэтому получить условия непрерывной автономности затруднительно. Такой закон регулирования частоты со статизмом по перетоку мощности в установившемся режиме обеспечивает постоянство частоты и предписанное значение обменной мощности. Нарушение условий автономности приводит к затягиванию переходного процесса регулирования мощности.
Но, как было показано ранее, средневзвешенный коэффициент статизма энергосистемы не есть величина постоянная. Поэтому получить условия непрерывной автономности затруднительно. Такой закон регулирования частоты со статизмом по перетоку мощности в установившемся режиме обеспечивает постоянство частоты и предписанное значение обменной мощности. Нарушение условий автономности приводит к затягиванию переходного процесса регулирования мощности.