dd9ac934c1d0f4ee481ad047aea812f9.ppt
- Количество слайдов: 97



University of Bridgeport School of Engineering CISSE 2009 Keynote Speech Robotics, Intelligent Sensing and Control: New Directions in Research and Education Tarek Sobh Vice president for graduate studies and research Dean, School of Engineering

Outline of Ongoing Project • Online Automation and Control: An Experiment in Distance Engineering Education • E-Learning: Case Studies in Web-Controlled Devices and Remote Manipulation • Prototyping Environment for Robot Manipulators • Manipulator Workspace Generation and Visualization in the Presence of Obstacles • Kinematic Synthesis of Robotic Manipulators from Task Descriptions • New concept in optimizing the manipulability index of serial Manipulators using SVD method

Outline of Ongoing Project • Industrial Inspection and Reverse Engineering • Recovering 3 -D Uncertainties from Sensory Measurements for Robotics Applications • Sensing Under Uncertainty for Mobile Robots • Service Robots A Tire Changing Manipulator • Robot Design and Dynamic Control Simulation Software Solutions From Task Points Description • Experimental Robot Musicians • Design and Implementation of a Multi-sensor Mobile Platform

Online Automation and Control: An Experiment in Distance Engineering Education

Introduction • Online Distance Education is a major part of the current education system • Started as an internal exercise to share and discuss ideas • Ever growing need for part-time education • 213 Universities offering online courses at various levels and disciplines in the US • Majority of the online courses are non-technical • Lacking laboratory based courses

Need for Online Education • Part time course work • Working class willing to pursue higher education • Social responsibilities • Current socio-political situation • National and International demand

Distance Engineering Education • Accredited engineering degrees • Under-graduate and Graduate level • Computer Engg, Electrical Engg, Mechanical Engg • Comprehensive laboratory based courses.

Partnerships § Great value of American engg. degrees overseas § Partnership with foreign University/Institution providing • Infrastructure • Teaching support • Examination facilities § Closer to the student concentration § Helps in better delivery of courses

Projects Implemented Towards DL Education • Mobile Robot Controlled by a Phone • Internet Based Software Library for the SIR-1 Serial Port Controlled Robot • Internet Based Computer Vision Framework For Security, Surveillance And Tracking Applications
 systems")
Online Distance Laboratories • Using Automation and Telerobotic (controlling devices from a distance) systems • Real-time laboratory experience via the internet 1. Tele-operation of Mitsubishi Movemaster 2. RISCBOT – A Web Enabled Autonomous Navigational Robot 3. Tele-operation of the FESTO Process Controller

1. Tele-operation of Movemaster • Can be used in 3 modes § Evaluation mode § Teacher mode § Student mode

RISCBOT • Waits for command from the server. • Wall clinging robot. • Image processing program checks for doors. • Uses Ultrasonic sensors for obstacle avoidance. • PC acts as central decision maker.

FESTO Process Controller • Providing telerobotic operability of the FESTO process control machine by interfacing it with the Mitsubishi Movemaster robot.

Conclusion • Virtual online collaboration • Lab-based distance education • Accredited Engineering/Technical lab-based experience, degrees & training via distance learning

Prototyping Environment for Robot Manipulators

Robot Prototyping Environment

Design Parameters: Subsystem Notification

Database Design Considerations School of Engineering University of Bridgeport

To design a robot manipulator, the following tasks are required: • Specify the tasks and the performance requirements. • Determine the robot configuration and parameters. • Select the necessary hardware components. • Order the parts. • Develop the required software systems (controller, simulator, etc. . . ). • Assemble and test.

Ergonomic and Efficient Software Alternatives for High Cost Manipulators - Direct, Wireless and Networked Control Techniques
 for a predetermined task")
High Cost Manipulators • deciding-on and purchasing the right manipulator(s) for a predetermined task (budget, purchasing time) • educational institutions (diversity of software / hardware controlling techniques; possibility of becoming victims of abusive usage)

Ergonomic and Efficient Software Alternative • • • software simulation and control package standalone simulator networked simulator “virtual” manipulator remote automation / distance learning cell phone based control
 n general purpose")
The Manipulator Used in the Implementation Mitsubishi, RV-M 1 (Movemaster EX) n general purpose commercial arm n n 5 DOF

The Simulator: Kinematics IK/DK control, workspace-safe, real-time, CAD/robot

The Simulator: Trajectory Control real-time trajectory modeling and testing, CAD/robot

The Simulator: Networking Model client simulator client/server simulator server/robot simulator n direct serial link connectivity actual robot pipelined TCP/IP connectivity, allowing for effective distance learning methods and flexible remote automation and control n

The Simulator: Networking Model Scenario controlling the robot through 2 pipelined simulators

The Simulator: Cell Phone Server Mode in cell phone server mode, the simulator allows direct control over the manipulator or a pipeline of simulators, through a web enabled cell phone

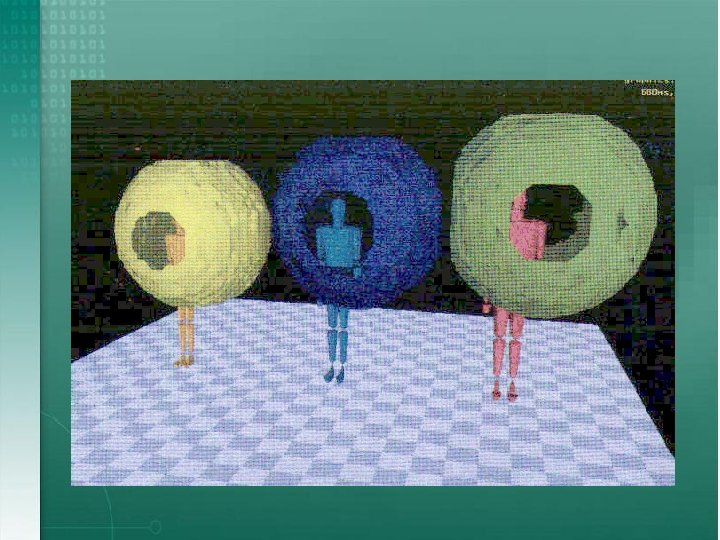
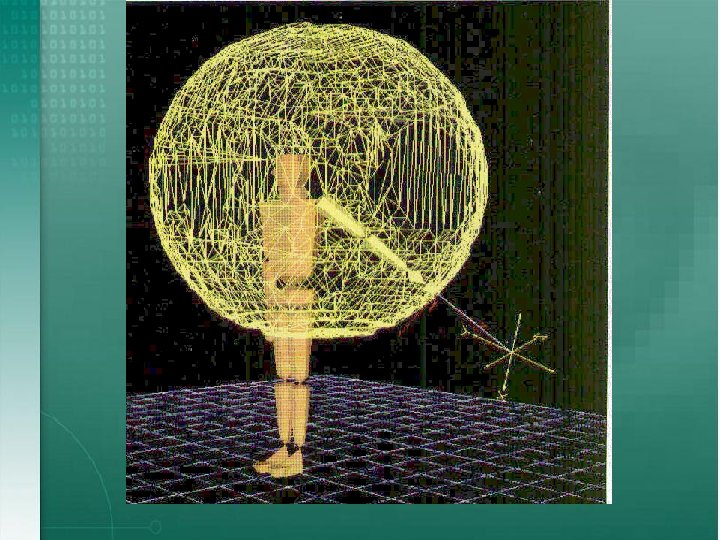
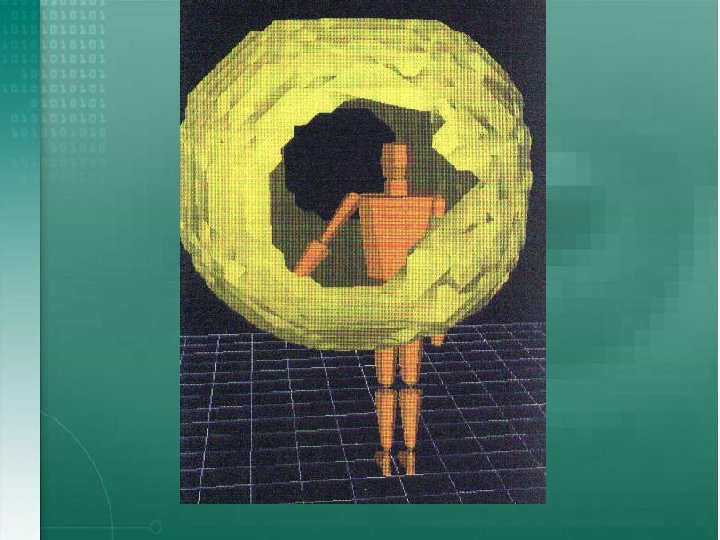
Manipulator Workspace Generation and Visualization in the Presence of Obstacles

School of Engineering University of Bridgeport

Kinematic Synthesis of Robotic Manipulators from Task Descriptions

Envisioning Optimal Geometry Workspace Dimensions and Coordinates of the Task-Points Restrictions on Manipulator Configuration Velocity and Acceleration Requirements Obstacles, Working Medium, and Trajectory Biases

Objectives • Parameters considered in this work: – Coordinates of the task-points – Spatial constraints – Restrictions (if any) on the types of joints • Goals – Simplified interface – Performance – Modular architecture to enable additional optimization modules (for velocity, obstacles, etc. )
 • For performance purposes the manipulability measure was the one originally")
Manipulability Measure w=√det(J∙JT) • For performance purposes the manipulability measure was the one originally proposed by Tsuneo Yoshikawa • Singular configurations are avoided by maximizing the determinant of the Jacobian matrix

Optimization Measure Task Points Manipulability Measure Dimensional Restrictions Manipulator Jacobian DOF & Types of Joints Joint Vector

Screenshots

Sample I : Trajectory

Sample I : Manipulability Ellipsoids

School of Engineering University of Bridgeport

Sample II : Manipulability Ellipsoids

School of Engineering University of Bridgeport

School of Engineering University of Bridgeport

New concept in optimizing the manipulability index of serial manipulators using the SVD method

• Studying the manipulability index for every point within the workspace of any serial manipulator is considered one of the important issues, required for designing trajectories or avoiding singular configurations. • The manipulability measure is an indicator of how close the manipulator is to being in singular configurations.

Manipulability Bands of six degrees of freedom manipulator

Manipulability Bands of Puma 560 in 2 D workspace

Manipulability Bands of Mitsubishi movemaster in 2 -D workspace.

Industrial Inspection and Reverse Engineering

Why reverse engineering? • Applications: – – – – Legal technicalities. Unfriendly competition. Shapes designed off-line. Post-design changes. Pre-CAD designs. Lost or corrupted information. Isolated working environment. Medical. • Interesting problem • Findings useful.

Closed Loop Reverse Engineering School of Engineering University of Bridgeport

A Framework for Intelligent Inspection and Reverse Engineering

Recovering 3 -D Uncertainties from Sensory Measurements for Robotics Applications

Propagation of Uncertainty

Flow Envelopes

Tolerancing and Other Projects

Problem A unifying framework for tolerance specification, synthesis, and analysis across the domains of industrial inspection using sensed data, CAD design, and manufacturing.

Solution We guide our sensing strategies based on the manufacturing process plans for the parts that are to be inspected and define, compute and analyze the tolerances of the parts based on the uncertainty in the sensed data along the different tool paths of the sensed part.

School of Engineering University of Bridgeport

Sensing Under Uncertainty for Mobile Robots

Abstract Sensor Model We can view the sensory system using three different levels of abstraction • Dumb Sensor: returns raw data without any interpretation. • Intelligent Sensor: interprets the raw data into an event. • Controlling sensor: can issue commands based on the received events.

Trajectory of the robot in a hallway environment School of Engineering University of Bridgeport

Trajectory of the robot in the lab environment

Potpourri of other R&A Projects

Projects • Modeling and recovering uncertainty in 3 -D structure and motion • Dynamics and kinematics generation and analysis for multi-DOF robots • Active observation and control of a moving agent under uncertainty • Automation for genetics application • Manipulator workspace generation in the presence of obstacles • Turbulent flow analysis using sensors within a DES framework

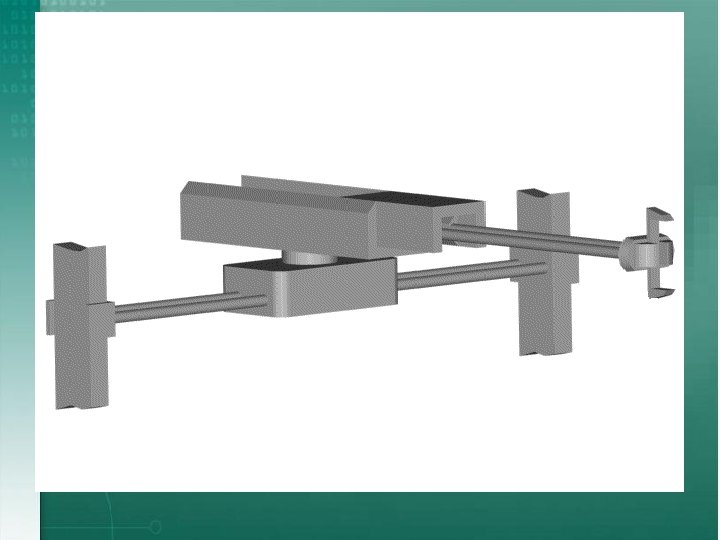
Service Robots A Tire Changing Manipulator

Design and Construction • A prototype of the racing car :

Design and Construction • The manipulator will be of the depicted form. The design was derived from inertial and dexterity calculations • Three essential Components: the sliding mechanism, the arm, and the end effector system.

Design and Construction • All of the four arms should be suspended with the visualized sliding mechanism.

Experimental Robot Musicians

Introduction • Robot musicians perform on real instruments through the usage of mechanical devices, such as servomotors and solenoids • Research innovations linking music, robotics and computer science

Motivation Music Expressiveness • Offer the audience live-experience very similar to listening to a human musician. • Real instrument performance, such as the physical vibration of a violin string, provides a much stronger case in music expressiveness, versus electronic music synthesizers. • Mozart - eine kleine nacht musik: whole ensemble
 • Bypass several technical difficulties that are typically encountered")
Motivation Music Expressiveness (cont. ) • Bypass several technical difficulties that are typically encountered by human musicians • More degrees of freedom in real-time performances and reach a higher level of performance difficulty, flexibility and quality. • As an example, a violin is played by a robot musician with hands that have 12 fingers.
 Robot musicians, “the P. A.")
Robot Musicians Architecture Robot Musicians Band Overview (cont. ) Robot musicians, “the P. A. M. band”, invented by Prof. Kurt Coble. The moth: features violin solo, composed by Prof. Kurt Coble, companied by percussion ensemble, electric base and electric guitar
 Austin plays a Percussion Ensemble")
Robot Musicians Architecture Robot Musicians Band Overview (cont. ) Austin plays a Percussion Ensemble Dusty plays a red electric guitar

Robot Musicians Architecture Robot Musician Architecture Overview • A three-module architecture
 Servo attached to one bow of Jasche")
Robot Musicians Architecture Motion Module (Cont. ) Servo attached to one bow of Jasche Solenoid (with holding power of 1. 5 pounds) attached to Jasche

Extreme Modularity & Design RISCBot II

Extreme Modularity & Design Introduction • End users can customize the platform by simply defining the available different sensing devices. Advantages: 1. Expandable. 2. Reduce unnecessary redundant design effort.

Extreme Modularity & Design • Actuation Plateform. • Sensing Devices • Tasks

Extreme Modularity & Design • Example for Tasks: 1. 2. 3. 4. Navigation and Obstacle Avoidance. Path planning. Map building. Manipulation.

Extreme Modularity & Design • Sensing Devices: ØCameras. ØSonar. ØInfrared. Ø Inertial Measurement Unit (IMU) ØLaser range finder.

Sonar Sensor we used LV –Max. Sonar –EZ 0 ultrasonic sensors

Infrared Proximity Sensor • Infrared sensors operate by emitting an infrared light, and detecting any reflection off surfaces in front of the robot. If the reflected infrared is detected, it means that an object is detected. • We have used an infrared proximity - Sharp GP 20 A 21 YK

Infrared Proximity Sensor

Jazzy 1122 Wheelchair

Jazzy 1122 Wheelchair

RISCbot II

RISCbot II

Features • RISCBot II is a high-payload platform with a payload up to 350 lbs. • RISCBot II is a high-speed platform which moves up to 6 mph. • RISCBot II powerful motors and two 14” pneumatic wheels on steel frame with suspension is designed for higher speeds with good response.
. • ATS makes the")
Features • RISCBot II is equipped with Active-Trac Suspension (ATS). • ATS makes the platform to traverse different types of terrain and obstacles while maintaining smooth operation. • RISCBot II has two front Anti-Tip Wheels which work with the ATS to maneuver obstacles. • RISCBot II also has Rear Casters wheels to respond to the weight transfer and to pivot while driving over obstacles.

ENGINEERING “UB’s Engineering School, with 1, 250 students, is among top three for enrollment in New England. ” CT Post 11/22/2007 School of Engineering University of Bridgeport

Research Collaborators • • • Raul Mihali. Anatoli Sachenko. Sarosh Patel. Bei Wang. Puneet Batra. Amit Singh. Sudip Pathak. Tomas Vitulskis. Andrew Rosca. Ayssam El Kady. Eslam M. Gebriel. Mohammed.

Thank you…
dd9ac934c1d0f4ee481ad047aea812f9.ppt