b57670fa0e9b3f273c9534c2d1cbdf91.ppt
- Количество слайдов: 59



Two Worlds: Abstractions in the Continuous World Rupak Majumdar Max Planck Institute for Software Systems

Cyber-Physical Systems 1. Software Controlled interactions with the physical world 2. Safety Critical Software a major component: Boeing 747: ~50 ECUs, 4 M LOC ETCS Kernel: ~0. 5 MLOC Lexus 2006: ~100 CPUs, ~7 M LOC BMW: ~70 -100 CPUs, ~100 M LOC!

Cyber-Physical Systems 1. Software Controlled interactions with the physical world 2. Safety Critical 3. Software is the hard part - Expensive, brittle - Low productivity, High QA cost - Major part of development cost

Control System Development Validate against system performance spec Combine Environment = spec Plant Model x’= Ax + Bu Controller Model u= Kx = Control Software spec Virtual World Real World Environment = impl = Controller (Software+Hardware) Plant (Hardware) Combine Validate Control impl

Formal Methods Challenges • Verification How can we ensure a system meets its specifications? • Synthesis How can we automatically construct controllers for temporal requirements? • Abstraction and Robustness When are two systems close? When is a system robust?

This Talk: FM in the Control World - Proof techniques for verification - Epsilon-bisimulations and reactive synthesis - Input-output robustness - End-to-end arguments

Disclaimer Tutorial introduction to the field

Continuous Dynamical Systems Specification: f : Dynamics u : Input from the controller … assume f is “nice” Trajectory: Solution of the differential equation Stability: “Under the action of the controller, the dynamics converges to the origin”

Hybrid Dynamical Systems || Discrete constraint: - Control task can only run once every k cycles - The system must reach a sequence of setpoints while avoiding bad states - LTL specification

Verification Question || Given a controller that claims to - Stabilize the system - Satisfy additional discrete constraints Check the controller works correctly

Synthesis Question || Synthesize a controller that - Stabilizes the system - Satisfies additional discrete constraints

Formal Methods Perspective Verification: Safety Liveness Inductive invariants Ranking functions Synthesis: Controller design Reactive synthesis Q: How do we apply these techniques to the continuous world?

Verification

Commonalities Control Theory Formal Methods -Safety: Show that system stays in safe states -Safety: Show that program stays in safe states -Stability: Show that system eventually goes to setpoint -Liveness: Show that program eventually terminates -Techniques: Real Analysis -Techniques: (Discrete) Logic

Model Problem: Ensure no trajectory from Init reaches Bad
![[Prajna. Jadbabaie 04] Barriers: B(x) Init Bad The dynamics pushes the state back at](https://present5.com/presentation/b57670fa0e9b3f273c9534c2d1cbdf91/image-16.jpg "[Prajna. Jadbabaie 04] Barriers: B(x) Init Bad The dynamics pushes the state back at")
[Prajna. Jadbabaie 04] Barriers: B(x) Init Bad The dynamics pushes the state back at the boundary of the barrier

Reachability Target
![[Lyapunov. B. C. ] Lyapunov functions: L(x) The dynamics pushes the state down along](https://present5.com/presentation/b57670fa0e9b3f273c9534c2d1cbdf91/image-18.jpg "[Lyapunov. B. C. ] Lyapunov functions: L(x) The dynamics pushes the state down along")
[Lyapunov. B. C. ] Lyapunov functions: L(x) The dynamics pushes the state down along the level sets of L(x)

Commonalities Control Theory Formal Methods -Safety: Show that system stays -Safety: Show that program in safe states stays in safe states * Barrier certificates * Inductive invariants -Stability: Show that system eventually goes to setpoint * Lyapunov functions -Techniques: Real Analysis * Constraints? -Liveness: Show that program eventually terminates * Rank functions -Techniques: (Discrete) Logic * Horn clauses

Barriers/LF to Constraints
 is a polynomial Fix polynomial template for B Polynomial constraints")
Constraints: Polynomials Assume f(x) is a polynomial Fix polynomial template for B Polynomial constraints
 ≥ 0 Look for polynomials p")
Aside: Sum of Squares Want to show: p(x) ≥ 0 Look for polynomials p 1(x), …, pk(x) s. t. p(x) = p 1(x)2 + … + pk(x)2 Sufficient but not necessary But search for “sum of squares” polynomials reduces to convex optimization (semi-definite programming)
![Not just Safety/Reachability… Horn clause formulations carry over: - LTL, CTL*, ATL* [Dimitrova. M]](https://present5.com/presentation/b57670fa0e9b3f273c9534c2d1cbdf91/image-23.jpg "Not just Safety/Reachability… Horn clause formulations carry over: - LTL, CTL*, ATL* [Dimitrova. M]")
Not just Safety/Reachability… Horn clause formulations carry over: - LTL, CTL*, ATL* [Dimitrova. M] Idea for LTL: 1. Convert to parity conditions 2. Certificate = Sequence of functions V 0, …, Vk - even i barrier - odd i Lyapunov function that exits this color

Formal Methods Challenge 1. Design numerically stable and scalable decision procedures for polynomial arithmetic 2. Connect the search for barriers and Lyapunov functions to abstraction-refinement techniques

Synthesis

Controller Synthesis for LTL Continuous system Abstraction ? Control input u Reactive synthesis Refinement Discrete controller
∈R means that every trajectory starting from x")
Girard. Pappas 07, Tabuada ε-Bisimulation (x, y)∈R means that every trajectory starting from x is matched up to ε by a trajectory from y and vice versa

Controller Synthesis for LTL Continuous system Abstraction Control input u Reactive synthesis Refinement Discrete controller When do finite bisimulations exist?

Angeli 02 Incremental Stability “Trajectories converge to each other as time progresses” Incremental asymptotic stability (AS): || x(t, x 0, u) - y(t, y 0, u) || ≤ β (|| x 0 – y 0 ||, t) for all u Incremental input-to-state stability (ISS): || x(t, x 0, u) - y(t, y 0, v) || ≤ β (|| x 0 – y 0 ||, t) + γ( || u – v || ) β is KL, γ is K

Incremental Stability, in Pictures Linear systems: Asymptotic stability (= all eigenvalues have negative real part) incremental stability

Transition Systems Fix a sampling time τ Transition system: States: Rn Labels: Piecewise constant control inputs Transitions:

Intuition - Discretize state and input space - Error accumulated due to discretization cancel out because of incremental stability x y

Finite Bisimilarity Fix an incremental ISS continuous system Fix precision ε, sampling time τ Theorem: [Pola. Girard. Tabuada] Can choose discretization parameters a (state discretization), b (input discretization) s. t. there is a finite ε bisimulation

Zamani. Efsahani. M. Abate. Lygeros Extensions: Stochastic Dynamics - Extend notions of incremental ISS to stochastic ones - Finite epsilon-bisimulation (in the sense of expectations) exists for any compact set

Good News/Bad News - Now discrete synthesis can be applied - Tool: Pessoa [Roy. M. Tabuada] - (coming up) - Expensive procedure: exponential in the dimension of the system

Example 1: Motion Planning

Example 1: Motion Planning
 Control: 155 s")
Example 1: Motion Planning Abstraction: 91035 states (585 s) Control: 155 s

Example 2: DC Motor Speed Control Spec: Abstraction: 1 M states, 150 s, Controller found in 4 s

Formal Methods Challenges 1. Better abstractions for bisimulations? - Using timed automata? (exponentially succinct representations) 2. Abstraction and refinement for control?

End-to-end Design

Control System Development Validate against system performance spec Combine Environment = spec Plant Model x’= Ax + Bu Controller Model u= Kx = Control Software spec Virtual World Real World Environment = impl = Controller (Software+Hardware) Plant (Hardware) Combine Validate Control impl

Controller Implementations Physical world and software implementations may not match up • Resource constraints, finite precision, distributed computation • Uncertainties in measurements/actuations How can we ensure that the implemented system correctly implements the controller? What does correctly mean?

Stability “The physical plant converges to a desired behavior under the actions of the controller” Example: In the steady state, the angular velocity of a DC motor will be between 7. 5 and 8. 5 rad/s Mathematical Model Software Implementation

Stability Example: In the steady state, the angular velocity of a DC motor will be between 7. 5 and 8. 5 rad/s Mathematical Model Software Implementation Question: What is the effect of implementation error on system stability?

Effects of Implementation Error ρ Ideal, Mathematical Model Implementation The software implementation introduces errors due to: - Limited precision arithmetic - Quantization of sensing and actuation - Computation times -… Can we bound the effect of error on the stability?
![Bound on Errors Theorem [Anta. M. Saha. Tabuada 10] If a is the L](https://present5.com/presentation/b57670fa0e9b3f273c9534c2d1cbdf91/image-47.jpg "Bound on Errors Theorem [Anta. M. Saha. Tabuada 10] If a is the L")
Bound on Errors Theorem [Anta. M. Saha. Tabuada 10] If a is the L 2 gain of a linear control system and b a bound on the implementation error, then ρ≤a. b Separation of concerns: • Calculate L 2 gain from the mathematical model • Calculate implementation error from the code
 Controller u = k(x) Use an ISS")
Non-linear Systems System x’ = f(x, u) Controller u = k(x) Use an ISS Lyapunov function V, and the additional constraint from robust control theory: ∂V/∂x. f(x, k(x)+e) ≤ - λV(x) + σ || e ||
![Non-linear Systems: Error Bounds Theorem [Anta. M. Saha. Tabuada 10]: If b is a](https://present5.com/presentation/b57670fa0e9b3f273c9534c2d1cbdf91/image-49.jpg "Non-linear Systems: Error Bounds Theorem [Anta. M. Saha. Tabuada 10]: If b is a")
Non-linear Systems: Error Bounds Theorem [Anta. M. Saha. Tabuada 10]: If b is a bound on the implementation error, and σ, λ as before for some Lyapunov function V, then ρ ≤ σ/λ. b The value of σ and λ can be found using Sum of Squares (So. S) optimization techniques

Error Sources - Sampling errors: Sampling a function at discrete points - Quantization errors: Finite precision arithmetic Assume that sampling errors are negligible (by sampling fast enough) Focus on quantization errors

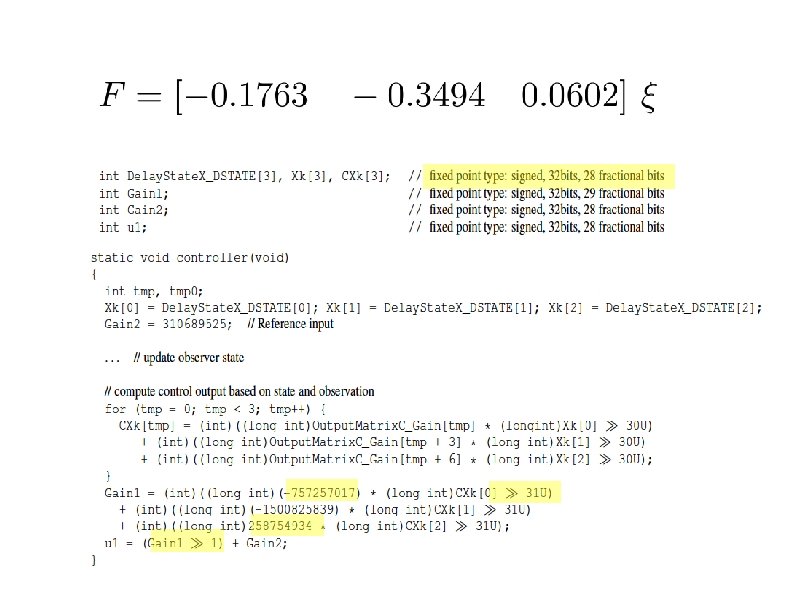
Bounding the Error: Finite Precision • Only consider error due to finite precision • Target fixed-point implementations • Each real variable is implemented using n bits, with k bits for the fractional part k n
")
Fixed Point Arithmetic Can perform arithmetic operations on this representation (using bitshifts and arithmetic) k 1 n n + n k 2 + k 1 n
, implementation y = F(x) Set up optimization problem:")
Algorithm Given: function y = f(x), implementation y = F(x) Set up optimization problem: Max | y – y| the difference in outputs Subject to: x ∈ [l, u], |x – x| ≤ e, y = f(x) SP(F)(x, y) the range of inputs the precision of the representation the “actual” controller output the “computed” controller output SP(F)(x, y) is a logical formula relating inputs x and outputs y of function F

Computing SP: Symbolic Execution • Run the program with symbolic inputs • Each execution maintains - • A symbolic store: map program variables to symbolic expressions A path constraint that specifies constraints on inputs for the current path to be executed SP(F) = Disjunction of path constraints along all paths

Implementation Simulink Model Real-Time Workshop C code -Implementation of concolic execution with support for numerical operations CIL Instrumented C code Concolic Execution Yices+Hy. Sat Symbolic constraints -Collect symbolic constraints and relate to control system parameters -Model fixed-point arithmetic precisely

From Verification to Synthesis Verification Problem: Given a controller, compute the bound ρ ρ Synthesis Problem: Find a controller implementation for which the bound is minimized Search over: - all implementations of a given controller - all stabilizing controllers for a fixed budget

Conclusion Abstraction + Verification techniques from computer science can help build better systems that interact with the physical world

Thank You http: //www. mpi-sws. org/~rupak/
b57670fa0e9b3f273c9534c2d1cbdf91.ppt