

Теория деформации.ppt
- Количество слайдов: 15
 Теория деформации Лекция № 3
Теория деформации Лекция № 3
 Тензор деформации Рассмотрев напряжение в элементарной области, изучаем также деформацию в этой области, чтобы написать между ними соотношение, являющееся обобщением закона Гука. Рассмотренные случаи растяжения и сдвига характеризовались постоянством относительной деформации (исключая кручение) по всему деформируемому телу. Оно создавалось условиями закрепления тела, правильной его формой, а также равномерным распределением действующей силы. В общем случае деформация меняется от точки к точке. Поэтому следует говорить о деформации в данной точке, имея в виду изменение объема и формы элемента тела в окрестности этой точки.
Тензор деформации Рассмотрев напряжение в элементарной области, изучаем также деформацию в этой области, чтобы написать между ними соотношение, являющееся обобщением закона Гука. Рассмотренные случаи растяжения и сдвига характеризовались постоянством относительной деформации (исключая кручение) по всему деформируемому телу. Оно создавалось условиями закрепления тела, правильной его формой, а также равномерным распределением действующей силы. В общем случае деформация меняется от точки к точке. Поэтому следует говорить о деформации в данной точке, имея в виду изменение объема и формы элемента тела в окрестности этой точки.
 При этом ни векторные, ни скалярные величины не могут быть использованы в качестве меры деформированности элемента тела, для этого необходимы более сложные, тензорные величины. Для этого рассматривается тело, с первоначальной формой (рис. 1), до и после деформации. Для математического описания этой деформации сопоставим каждой точке тела вектора смещения:
При этом ни векторные, ни скалярные величины не могут быть использованы в качестве меры деформированности элемента тела, для этого необходимы более сложные, тензорные величины. Для этого рассматривается тело, с первоначальной формой (рис. 1), до и после деформации. Для математического описания этой деформации сопоставим каждой точке тела вектора смещения:
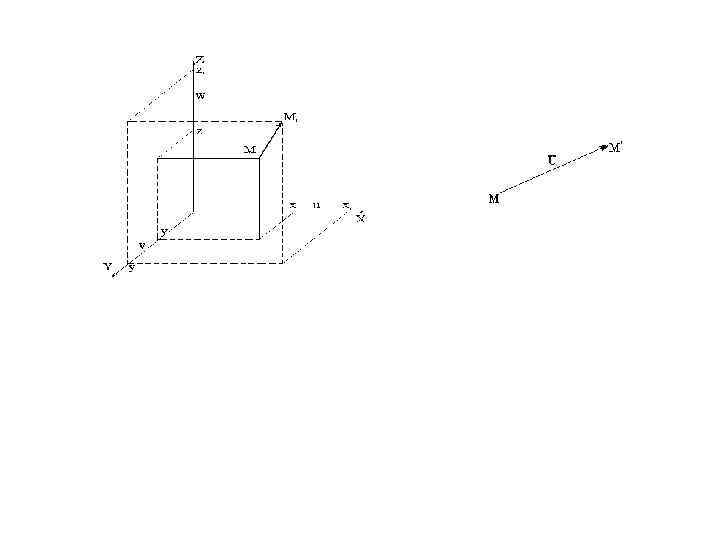
 Следовательно, при деформации мы имеем дело с векторным полем , область которого совпадает с первоначальными размерами тела. Зная поле вектора смещения , можем полностью определить деформацию тела. Однако, отдельно взятый для данной точки вектор смещения – характеризовать деформацию не сможет. Ведь если и соседние точки сместить на такую же величину U в окрестности данной точки, то рассматриваемый элемент тела считается недеформированным, хотя U≠ 0 вектор смещения не равен нулю. Отсюда видно, что степень деформации в каждой точке тела определяется относительным изменением вектора смещения в ее окрестности.
Следовательно, при деформации мы имеем дело с векторным полем , область которого совпадает с первоначальными размерами тела. Зная поле вектора смещения , можем полностью определить деформацию тела. Однако, отдельно взятый для данной точки вектор смещения – характеризовать деформацию не сможет. Ведь если и соседние точки сместить на такую же величину U в окрестности данной точки, то рассматриваемый элемент тела считается недеформированным, хотя U≠ 0 вектор смещения не равен нулю. Отсюда видно, что степень деформации в каждой точке тела определяется относительным изменением вектора смещения в ее окрестности.
 является его полная производная по векторному аргументу, представляющая") Поэтому характеристикой векторного поля U (r) является его полная производная по векторному аргументу, представляющая собой тензор производной: Этот тензор не симметричен. Разложим его на симметричную и антисимметричную части.
Поэтому характеристикой векторного поля U (r) является его полная производная по векторному аргументу, представляющая собой тензор производной: Этот тензор не симметричен. Разложим его на симметричную и антисимметричную части.
 Выписываем в явном виде матрицу антисимметричного тензора. ¶U x - ¶x ˆ A = - ¶x ¶U ¶x x ¶x 1 ¶ Uy 2 ¶U ¶U x ¶y z - - ¶y ¶U ¶U x ¶z ¶y y ¶x y - ¶y ¶U ¶U ¶U x ¶z ¶U y ¶y z - - ¶U y ¶z z ¶x - ¶z ¶U ¶U ¶U z ¶y - ¶U z ¶z Если внимательно рассмотреть, то видны, что диагональные элементы матрицы равняются нулю, а антисимметричный тензор определяется по существу тремя скалярными компонентами.
Выписываем в явном виде матрицу антисимметричного тензора. ¶U x - ¶x ˆ A = - ¶x ¶U ¶x x ¶x 1 ¶ Uy 2 ¶U ¶U x ¶y z - - ¶y ¶U ¶U x ¶z ¶y y ¶x y - ¶y ¶U ¶U ¶U x ¶z ¶U y ¶y z - - ¶U y ¶z z ¶x - ¶z ¶U ¶U ¶U z ¶y - ¶U z ¶z Если внимательно рассмотреть, то видны, что диагональные элементы матрицы равняются нулю, а антисимметричный тензор определяется по существу тремя скалярными компонентами.
, то антисимметричной части тензорапроизводной") Поскольку векторные величины в трехмерном пространстве характеризуются тремя компонентами (проекциями), то антисимметричной части тензорапроизводной можно сопоставить вектор называемый ротором векторного поля и его записываем следующим образом: Или Этот вектор является вектором кручения и составляет вихревую часть вектора смещения.
Поскольку векторные величины в трехмерном пространстве характеризуются тремя компонентами (проекциями), то антисимметричной части тензорапроизводной можно сопоставить вектор называемый ротором векторного поля и его записываем следующим образом: Или Этот вектор является вектором кручения и составляет вихревую часть вектора смещения.
 Раскрываем симметричную часть тензорапроизводной Û: Этот тензор полностью определяется деформацией тела и называется тензором деформации.
Раскрываем симметричную часть тензорапроизводной Û: Этот тензор полностью определяется деформацией тела и называется тензором деформации.
 Если вести некоторые обозначения, тогда этот тензор имеет вид:
Если вести некоторые обозначения, тогда этот тензор имеет вид:
 Однако, сумма диагональных элементов тензора деформации позволяет определить относительное изменение объема при деформации или его называет дилатацией или дивергенцией вектора упругого перемещения
Однако, сумма диагональных элементов тензора деформации позволяет определить относительное изменение объема при деформации или его называет дилатацией или дивергенцией вектора упругого перемещения
 Компоненты малой деформации. Эти величины называются компонентами малой деформации. Первые три компоненты определяют растяжение и сжатие, а остальные – сдвиги. Помимо деформаций тело подвергается простому вращению вокруг трех осей. Вращение определяется углами:
Компоненты малой деформации. Эти величины называются компонентами малой деформации. Первые три компоненты определяют растяжение и сжатие, а остальные – сдвиги. Помимо деформаций тело подвергается простому вращению вокруг трех осей. Вращение определяется углами:
 Формулы дают шесть основных зависимостей для линейных и угловых деформаций от составляющих перемещения. Эти зависимости называются уравнениями Коши:
Формулы дают шесть основных зависимостей для линейных и угловых деформаций от составляющих перемещения. Эти зависимости называются уравнениями Коши:
 • Скалярные и векторные потенциалы. • В общем случае поле смещений в окрестностях точки М состоит из двух частей: • 1) объемной • 2) вихревой • тогда является скалярным потенциалом, с помощью которого определяются смещения параллельно осям координат: • где • - векторным потенциалом поля смещений.
• Скалярные и векторные потенциалы. • В общем случае поле смещений в окрестностях точки М состоит из двух частей: • 1) объемной • 2) вихревой • тогда является скалярным потенциалом, с помощью которого определяются смещения параллельно осям координат: • где • - векторным потенциалом поля смещений.
 Обобщенный закон Гука Этот закон связывает относительное смещение с составляющими напряжений, а именно принимается линейная зависимость каждой из шести составляющих напряжений от шести составляющих деформации. Следовательно:
Обобщенный закон Гука Этот закон связывает относительное смещение с составляющими напряжений, а именно принимается линейная зависимость каждой из шести составляющих напряжений от шести составляющих деформации. Следовательно: