Презентация ТАУ.ppt
- Количество слайдов: 54
 ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ АВТОМАТИЗИРОВАННЫХ ПРОИЗВОДСТВ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕМЕНТЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ АВТОМАТИЗИРОВАННЫХ ПРОИЗВОДСТВ
 • Введение • Требования к уровню освоения содержания дисциплины • Согласно п. п. 2. 2. 3 ГОС "Требования к минимуму содержания и уровню подготовки выпускника по специальности 220401", выпускник (дипломированный специалист) в результате усвоения дисциплины "Теория автоматического управления" должен: • иметь представление о типах систем автоматического управления; • знать методы теоретического и экспериментального исследования с использованием современных методов планирования эксперимента, средств вычислительной техники; • иметь опыт анализа и синтеза систем автоматического управления.
• Введение • Требования к уровню освоения содержания дисциплины • Согласно п. п. 2. 2. 3 ГОС "Требования к минимуму содержания и уровню подготовки выпускника по специальности 220401", выпускник (дипломированный специалист) в результате усвоения дисциплины "Теория автоматического управления" должен: • иметь представление о типах систем автоматического управления; • знать методы теоретического и экспериментального исследования с использованием современных методов планирования эксперимента, средств вычислительной техники; • иметь опыт анализа и синтеза систем автоматического управления.
 • В обязательный минимум содержания образовательной программы подготовки по теории автоматического управления должны входить: • системы автоматического управления; • математическое описание систем автоматического управления с помощью дифференциальных уравнений, линеаризация, передаточная функция; • устойчивость линейных систем автоматического управления; • анализ качества процессов; • синтез линейных систем автоматического управления и их исследование в пространстве состояний; • основы теории нелинейных систем автоматического управления; • нелинейные импульсные системы. • Элементы разработанной программы, соответствующие требованиям ГОС к целевым установкам и минимума содержания (см. п. 1. 2. и п. 1. 3. данной программы) выделены в последующем тексте подчеркиванием.
• В обязательный минимум содержания образовательной программы подготовки по теории автоматического управления должны входить: • системы автоматического управления; • математическое описание систем автоматического управления с помощью дифференциальных уравнений, линеаризация, передаточная функция; • устойчивость линейных систем автоматического управления; • анализ качества процессов; • синтез линейных систем автоматического управления и их исследование в пространстве состояний; • основы теории нелинейных систем автоматического управления; • нелинейные импульсные системы. • Элементы разработанной программы, соответствующие требованиям ГОС к целевым установкам и минимума содержания (см. п. 1. 2. и п. 1. 3. данной программы) выделены в последующем тексте подчеркиванием.
 • Цели и задачи дисциплины преподавания и изучения дисциплины • Системы управления автоматизированным производством представляются объектами, способными к автоматической адаптации относительно окружающей среды и условий эксплуатации. • Квалификация современного инженера по разработке систем автоматизированного управления технологическим оборудованием, включающих в себя электронные и микропроцессорные системы, в итоге определяется уровнем его математических знаний в области теории автоматического управления и математического моделирования указанных систем на ЭВМ. • Целью изучения курса является освоение студентами основ теории автоматического управления и математического аппарата моделирования автоматических систем автоматики и электроники. Данный курс нацеливает студентов на освоение системного подхода к разработке автоматизированных систем управления технологическим оборудованием.
• Цели и задачи дисциплины преподавания и изучения дисциплины • Системы управления автоматизированным производством представляются объектами, способными к автоматической адаптации относительно окружающей среды и условий эксплуатации. • Квалификация современного инженера по разработке систем автоматизированного управления технологическим оборудованием, включающих в себя электронные и микропроцессорные системы, в итоге определяется уровнем его математических знаний в области теории автоматического управления и математического моделирования указанных систем на ЭВМ. • Целью изучения курса является освоение студентами основ теории автоматического управления и математического аппарата моделирования автоматических систем автоматики и электроники. Данный курс нацеливает студентов на освоение системного подхода к разработке автоматизированных систем управления технологическим оборудованием.
 • • • Рекомендуемая учебно-методическая литература: Бесекерский В. А. , Попов Е. П. Теория систем автоматического регулирования. — М. : Наука, 1975. Лукас В. А. Теория автоматического управления. – М. : Недра, 1990. – 416 с. Брюханов В. Н. и др. Теория автоматического управления. –М: Высшая школа, 2000 г. Остр¨м К. , Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. — М. : Мир, 1987. - 480 с. , ил. Оппенгейм Э. , Шафер Р. Цифровая обработка сигналов/ Пер. с англ. / Под ред. С. Я. Шаца. — М. : Связь, 1979. - 416 с. Антонью А. Цифровые фильтры: анализ и проектирование/ Пер. с англ. — М. : Радио и связь, 1983. - 320 с. Гольденберг Л. М. , Матюшкин Б. Д. , Поляк М. Н. Цифровая обработка сигналов: Справочник. — М. : Радио и связь, 1985. – 312 с. , ил. Дженкинс Г. , Ваттс Д. Спектральный анализ и его приложения: В 2 т. / Пер. с англ. Ф. М. Писаренко с предисловием А. М. Яглома — М. : Мир, 1971. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. — M. : Наука, 1978. Бронштейн И. Н. , Семендяев К. Н. Справочник по математике для инженеров и учащихся вузов. — М. : Наука, 1986.
• • • Рекомендуемая учебно-методическая литература: Бесекерский В. А. , Попов Е. П. Теория систем автоматического регулирования. — М. : Наука, 1975. Лукас В. А. Теория автоматического управления. – М. : Недра, 1990. – 416 с. Брюханов В. Н. и др. Теория автоматического управления. –М: Высшая школа, 2000 г. Остр¨м К. , Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. — М. : Мир, 1987. - 480 с. , ил. Оппенгейм Э. , Шафер Р. Цифровая обработка сигналов/ Пер. с англ. / Под ред. С. Я. Шаца. — М. : Связь, 1979. - 416 с. Антонью А. Цифровые фильтры: анализ и проектирование/ Пер. с англ. — М. : Радио и связь, 1983. - 320 с. Гольденберг Л. М. , Матюшкин Б. Д. , Поляк М. Н. Цифровая обработка сигналов: Справочник. — М. : Радио и связь, 1985. – 312 с. , ил. Дженкинс Г. , Ваттс Д. Спектральный анализ и его приложения: В 2 т. / Пер. с англ. Ф. М. Писаренко с предисловием А. М. Яглома — М. : Мир, 1971. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. — M. : Наука, 1978. Бронштейн И. Н. , Семендяев К. Н. Справочник по математике для инженеров и учащихся вузов. — М. : Наука, 1986.
 • • • • • Список понятий, знание которых необходимо на момент начала изучения курса Принципиальная схема технического устройства. Статический и динамический режимы работы технических устройств. Логарифмирование. Операции с комплексными числами и функциями. Операции с векторами. Линейная и нелинейная функции одной и нескольких переменных. Графическое сложение функций. Нахождение корней полинома. Разложение функции в ряд Тейлора. Разложение функции в ряд Фурье. Дифференцирование и интегрирование функций. Решение линейных дифференциальных уравнений классическим методом. Решение дифференциальных уравнений в операционном исчислении. Методы расчета электрических цепей в установившемся и переходном режимах. Электрическая машина постоянного тока.
• • • • • Список понятий, знание которых необходимо на момент начала изучения курса Принципиальная схема технического устройства. Статический и динамический режимы работы технических устройств. Логарифмирование. Операции с комплексными числами и функциями. Операции с векторами. Линейная и нелинейная функции одной и нескольких переменных. Графическое сложение функций. Нахождение корней полинома. Разложение функции в ряд Тейлора. Разложение функции в ряд Фурье. Дифференцирование и интегрирование функций. Решение линейных дифференциальных уравнений классическим методом. Решение дифференциальных уравнений в операционном исчислении. Методы расчета электрических цепей в установившемся и переходном режимах. Электрическая машина постоянного тока.
 является теоретической основой,") • Основные понятия и определения • Теория автоматического управления (ТАУ) является теоретической основой, на базе которой разрабатываются большинство автоматических устройств. Предметом изучения ТАУ являются принципы построения, методы анализа и синтеза широко распространенных систем автоматического регулирования и управления. • Основоположником ТАУ, зародившейся немногим более века назад, являются английский математик Д. Максвелл(1866), проф. Петербургского технологического института И. А. Вышнеградский (1876, 1877). Основы ТАУ были изложены в его работе "О регуляторах прямого действия" (1876 г. ) Он впервые показал, что процессы в устройстве управления и связанном с ним объектом неразрывно связаны между собой и требуют совместного исследования. • В устройствах управления важное место занимает проблема обеспечения устойчивости движения. Основоположником строгой теории устойчивости является профессор Харьковского университета А. М. Ляпунов (1857 -1918).
• Основные понятия и определения • Теория автоматического управления (ТАУ) является теоретической основой, на базе которой разрабатываются большинство автоматических устройств. Предметом изучения ТАУ являются принципы построения, методы анализа и синтеза широко распространенных систем автоматического регулирования и управления. • Основоположником ТАУ, зародившейся немногим более века назад, являются английский математик Д. Максвелл(1866), проф. Петербургского технологического института И. А. Вышнеградский (1876, 1877). Основы ТАУ были изложены в его работе "О регуляторах прямого действия" (1876 г. ) Он впервые показал, что процессы в устройстве управления и связанном с ним объектом неразрывно связаны между собой и требуют совместного исследования. • В устройствах управления важное место занимает проблема обеспечения устойчивости движения. Основоположником строгой теории устойчивости является профессор Харьковского университета А. М. Ляпунов (1857 -1918).
 • Производственный, технологический или технический объект, нуждающийся для определенного взаимодействия с другими объектами или процессами в специально организованном управляющем воздействии, называется объектом управления (ОУ). • Состояние любого технического устройства, которые можно характеризовать одной или несколькими физическими величинами. Физические величины, характеризующие состояние объекта управления называются выходными переменными объекта. Их совокупность определяют как вектор выходных состояний объекта управления. Этот вектор должен удовлетворять определенным требованиям, предъявляемым как установившимся, так и динамическим режимам работы технического устройства. Совокупность предписаний, определяющих характер изменения вектора входных состояний объекта управления, называется алгоритмом его функционирования. Несмотря на многообразие технических устройств можно выделить 3 базовых алгоритма их функционирования. К ним относятся:
• Производственный, технологический или технический объект, нуждающийся для определенного взаимодействия с другими объектами или процессами в специально организованном управляющем воздействии, называется объектом управления (ОУ). • Состояние любого технического устройства, которые можно характеризовать одной или несколькими физическими величинами. Физические величины, характеризующие состояние объекта управления называются выходными переменными объекта. Их совокупность определяют как вектор выходных состояний объекта управления. Этот вектор должен удовлетворять определенным требованиям, предъявляемым как установившимся, так и динамическим режимам работы технического устройства. Совокупность предписаний, определяющих характер изменения вектора входных состояний объекта управления, называется алгоритмом его функционирования. Несмотря на многообразие технических устройств можно выделить 3 базовых алгоритма их функционирования. К ним относятся:
 • Алгоритм стабилизации, который требует постоянства вектора выходного состояния Объекта Управления и равенство его заданному значению. • При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования.
• Алгоритм стабилизации, который требует постоянства вектора выходного состояния Объекта Управления и равенство его заданному значению. • При этом заданное значение должно оставаться постоянным в течении достаточно долгого периода времени. Примером систем, в которых используется алгоритм стабилизации, являются приводы главного движения станочного оборудования.
 • Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть: • Примером использования такого алгоритма являются системы числового программного управления.
• Программный алгоритм, для которого характерно изменение вектора выходного состояния ОУ по наперед известному закону или программе. В этом случае заданное значение вектора выходного состояния является известной функцией времени, то есть: • Примером использования такого алгоритма являются системы числового программного управления.
 • Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением: • Где – неопределенная функция времени. • Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону.
• Следящий алгоритм работы ОУ характеризуется тем, что требуемый закон изменения вектора выходного состояния объекта заранее неизвестен. Следящий алгоритм может быть описан выражением: • Где – неопределенная функция времени. • Таким алгоритмом работы характеризуются системы наведения или слежения за состоянием объекта, изменяющегося по случайному закону.
 Алгоритмы функционирования Объектов Управления. Стабилизация Программный Следящий
Алгоритмы функционирования Объектов Управления. Стабилизация Программный Следящий
 Функциональная схема системы управления
Функциональная схема системы управления
 • При изменении управляющего воздействия на объект, обладающий некоторой инерционностью, возникает переходный процесс. В течении этого процесса вектор выходного состояния ОУ не будет соответствовать требуемому значению. Характер переходного процесса определяется динамическими свойствами ОУ и закона изменения управляющего воздействия. Один из возможных видов переходного процесса для инерционного ОУ показан на рисунке.
• При изменении управляющего воздействия на объект, обладающий некоторой инерционностью, возникает переходный процесс. В течении этого процесса вектор выходного состояния ОУ не будет соответствовать требуемому значению. Характер переходного процесса определяется динамическими свойствами ОУ и закона изменения управляющего воздействия. Один из возможных видов переходного процесса для инерционного ОУ показан на рисунке.
 Переходный процесс в ОУ.
Переходный процесс в ОУ.
 • Действие любого возмущающего фактора на объект управления приводит к отклонению значения вектора выходного состояния ОУ от требуемого значения. То есть имеет место соотношение: • Такое отклонение называется ошибкой управления объектом управления. Глобальной задачей теории автоматического управления можно считать определение такого алгоритма управления, который обеспечивает минимальное или не превышающего необходимого, отклонение вектора выходного состояния ОУ от требуемого значения.
• Действие любого возмущающего фактора на объект управления приводит к отклонению значения вектора выходного состояния ОУ от требуемого значения. То есть имеет место соотношение: • Такое отклонение называется ошибкой управления объектом управления. Глобальной задачей теории автоматического управления можно считать определение такого алгоритма управления, который обеспечивает минимальное или не превышающего необходимого, отклонение вектора выходного состояния ОУ от требуемого значения.
 заключается в том, чтобы обнаруживать") • Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения. • Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате действия которого последний переходит в требуемое состояние. (по академику А. И. Бергу).
• Принцип действия всякой системы автоматического регулирования (САР) заключается в том, чтобы обнаруживать отклонения регулируемых величин, характеризующих работу объекта или протекание процесса от требуемого режима и при этом воздействовать на объект или процесс так, чтобы устранять эти отклонения. • Под управлением понимают процесс организации такого целенаправленного воздействия на объект управления, в результате действия которого последний переходит в требуемое состояние. (по академику А. И. Бергу).
 • Для решения этой задачи используются разнообразные управляющие устройства или регуляторы. Управляющим устройством называется устройство, обеспечивающее формирование управляющего воздействия на объект управления, соответствующего алгоритму его работы. Устройство, выполняющее эти функции без непосредственного участия человека, называется автоматическим управляющим устройством или регулятором. • Совокупность объекта управления и управляющего устройства, взаимодействие которых приводит к выполнению поставленной цели, называется системой автоматического управления. Такая система включает в себя кроме ОУ и устройства управления, задающее устройство, которое формирует необходимый закон изменения требуемых значений вектора выходного состояния объекта управления.
• Для решения этой задачи используются разнообразные управляющие устройства или регуляторы. Управляющим устройством называется устройство, обеспечивающее формирование управляющего воздействия на объект управления, соответствующего алгоритму его работы. Устройство, выполняющее эти функции без непосредственного участия человека, называется автоматическим управляющим устройством или регулятором. • Совокупность объекта управления и управляющего устройства, взаимодействие которых приводит к выполнению поставленной цели, называется системой автоматического управления. Такая система включает в себя кроме ОУ и устройства управления, задающее устройство, которое формирует необходимый закон изменения требуемых значений вектора выходного состояния объекта управления.
 • Более частным случаем понятия "Управление" является понятие "регулирование". Регулирование состоит в достижении такой деятельности системы, при которой выравниваются все отклонения на выходе системы от заданного значения этого состояния. обеспечение только требуемых значений параметров, определяющих желаемый ход технологического процесса в том или ином объекте без участия человека, осуществляется системой автоматического регулирования.
• Более частным случаем понятия "Управление" является понятие "регулирование". Регулирование состоит в достижении такой деятельности системы, при которой выравниваются все отклонения на выходе системы от заданного значения этого состояния. обеспечение только требуемых значений параметров, определяющих желаемый ход технологического процесса в том или ином объекте без участия человека, осуществляется системой автоматического регулирования.
 Функциональная схема САУ
Функциональная схема САУ
 • Заданное значение технического параметра может быть постоянным или переменным. В первом случае говорят о прямом регулировании совмещенном с управлением. Во втором случае регулирование заключается в корректировке отклонений вектора выходных состояний системы от нормы каждого компонента этого вектора. Следовательно, регулированием можно назвать выравнивание отклонений от нормы, каждое значение которой определяется управлением.
• Заданное значение технического параметра может быть постоянным или переменным. В первом случае говорят о прямом регулировании совмещенном с управлением. Во втором случае регулирование заключается в корректировке отклонений вектора выходных состояний системы от нормы каждого компонента этого вектора. Следовательно, регулированием можно назвать выравнивание отклонений от нормы, каждое значение которой определяется управлением.
 • В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации).
• В теории автоматического регулирования основными являются проблемы: устойчивости, качества переходных процессов, статической и динамической точности, автоколебаний, оптимизации, синтеза и отождествления (идентификации).
 • Задачи общей теории автоматического регулирования заключаются в решении перечисленных проблем. При поиске решений используются: • Методы анализа устойчивости замкнутых САР • Методы оценки качественных показателей САР • Методы повышения точности САР • Методы коррекции динамических свойств САР • Методы синтеза САР
• Задачи общей теории автоматического регулирования заключаются в решении перечисленных проблем. При поиске решений используются: • Методы анализа устойчивости замкнутых САР • Методы оценки качественных показателей САР • Методы повышения точности САР • Методы коррекции динамических свойств САР • Методы синтеза САР

 • Основные признаки классификации САУ: • По назначению, то есть характеру изменения задающего воздействия, различают: • системы автоматической стабилизации; • системы программного управления; • следящие системы.
• Основные признаки классификации САУ: • По назначению, то есть характеру изменения задающего воздействия, различают: • системы автоматической стабилизации; • системы программного управления; • следящие системы.
 По принципу управления различают: Системы с управлением по разомкнутому циклу; Системы с управлением по замкнутому циклу; Системы комбинированного управления. По характеру используемых для управления сигналов различают: • непрерывные или аналоговые системы автоматического управления; • дискретные системы автоматического управления, из которых выделяет: • • • – импульсные системы автоматического управления; – релейные системы автоматического управления; – цифровые системы автоматического управления.
По принципу управления различают: Системы с управлением по разомкнутому циклу; Системы с управлением по замкнутому циклу; Системы комбинированного управления. По характеру используемых для управления сигналов различают: • непрерывные или аналоговые системы автоматического управления; • дискретные системы автоматического управления, из которых выделяет: • • • – импульсные системы автоматического управления; – релейные системы автоматического управления; – цифровые системы автоматического управления.
 • По характеру используемой информации об условиях работы различают: • системы автоматического управления с жестким законом управления и структурой; • системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся: – системы автоматической настройки; – самообучающие системы; – самоорганизующие системы. • По характеру математических соотношений различают: • линейные системы автоматического управления, для которых справедлив принцип суперпозиции;
• По характеру используемой информации об условиях работы различают: • системы автоматического управления с жестким законом управления и структурой; • системы автоматического управления с изменяемыми структурой и законом управления, к которым относятся: – системы автоматической настройки; – самообучающие системы; – самоорганизующие системы. • По характеру математических соотношений различают: • линейные системы автоматического управления, для которых справедлив принцип суперпозиции;
 • нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив. • Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется. • Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами. • По количеству выходных координат объекта управления различают: • одномерные системы автоматического управления; • многомерные системы автоматического управления.
• нелинейные системы автоматического управления, для которых принцип суперпозиции в общем случае не справедлив. • Как линейные, так и нелинейные САУ могут подразделяться на аналоговые, дискретные и дискретно-непрерывные, стационарные и нестационарные. При этом стационарной системой называется САУ, параметры элементов которой не зависят от времени работы системы. Для нестационарной САУ это условие не выполняется. • Стационарные и нестационарные САУ могут быть с сосредоточенными и распределенными параметрами. • По количеству выходных координат объекта управления различают: • одномерные системы автоматического управления; • многомерные системы автоматического управления.
 • Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин.
• Последние делятся на системы связанного и несвязанного управления. В системах связанного управления отдельные управляющие устройства соединены между собой внешними связями. Входящая в состав многомерной системы отдельная САУ называется автономной, если управляемая ею выходная переменная не зависит от значения остальных управляемых величин.
 • Для любых систем, в которых протекают процессы управления, имеется общая черта а именно, передача сообщений о происходящих в отдельных частях системы процессов посредством сигналов. В технических системах материальные носители информации называют носителями сигналов, которые можно изменять в соответствии с передаваемой информацией. К носителям сигналов можно отнести электрическое напряжение и ток, давление, механическое перемещение и т. д. Конструктивные элементы системы должны преобразовывать одни физические величины и соответствующие им сигналы в другие. Этот процесс отображается в кибернетическом понятии звена системы.
• Для любых систем, в которых протекают процессы управления, имеется общая черта а именно, передача сообщений о происходящих в отдельных частях системы процессов посредством сигналов. В технических системах материальные носители информации называют носителями сигналов, которые можно изменять в соответствии с передаваемой информацией. К носителям сигналов можно отнести электрическое напряжение и ток, давление, механическое перемещение и т. д. Конструктивные элементы системы должны преобразовывать одни физические величины и соответствующие им сигналы в другие. Этот процесс отображается в кибернетическом понятии звена системы.
 • Звено – это элемент, входящий в САУ, в котором определенным образом преобразуется входной параметр в выходной. Схематическое изображение звена в виде блока не отображает особенностей его конструкции. Существенным является только связь между воздействием на вход звена и его реакция на выходе. Такой подход позволяет создавать модели элементов различных технических систем независимо от их конкретной технической реализации. • Схема, изображающая последовательность процессов внутри устройства или системы называется структурной схемой.
• Звено – это элемент, входящий в САУ, в котором определенным образом преобразуется входной параметр в выходной. Схематическое изображение звена в виде блока не отображает особенностей его конструкции. Существенным является только связь между воздействием на вход звена и его реакция на выходе. Такой подход позволяет создавать модели элементов различных технических систем независимо от их конкретной технической реализации. • Схема, изображающая последовательность процессов внутри устройства или системы называется структурной схемой.
 Графическое представление блока связи двух переменных.
Графическое представление блока связи двух переменных.
 Графическое представление сумматора.
Графическое представление сумматора.
 Графическое представление функционального блока с двумя входными сигналами.
Графическое представление функционального блока с двумя входными сигналами.
 Структурная схема объекта управления
Структурная схема объекта управления
 Схема автоматического управления уровнем воды парового котла
Схема автоматического управления уровнем воды парового котла
 Схема автоматического управление температурой ДВС
Схема автоматического управление температурой ДВС
 Схема управления угловой скоростью вращения вала
Схема управления угловой скоростью вращения вала
 Схема управления углом поворота исполнительного звена
Схема управления углом поворота исполнительного звена
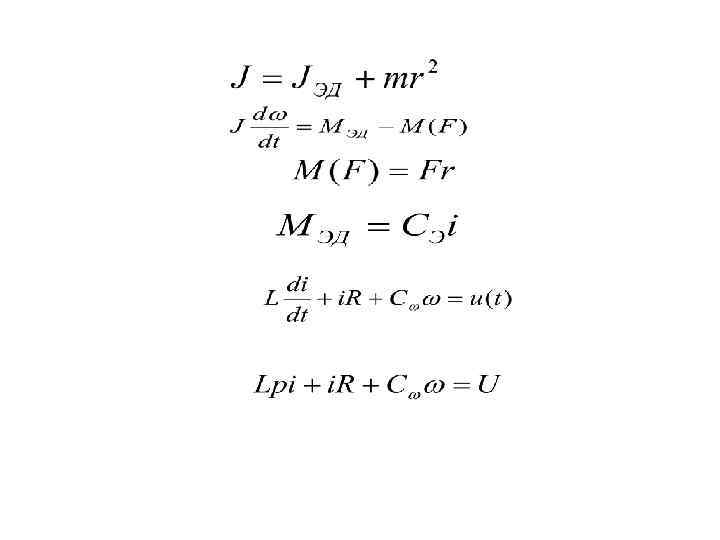
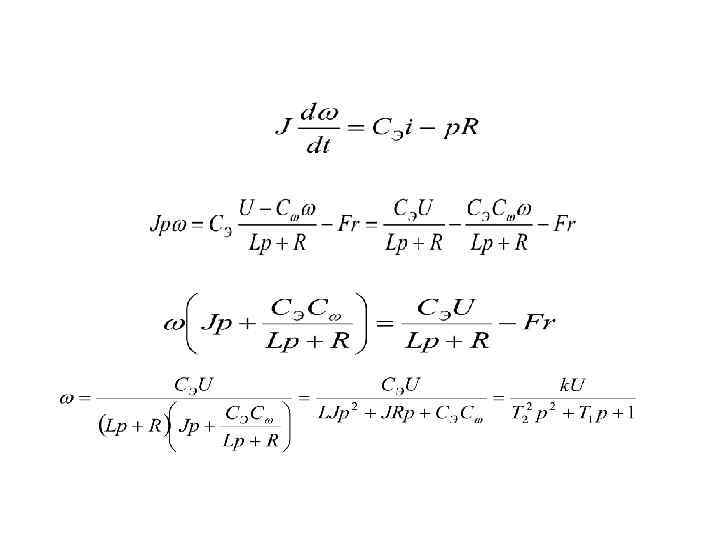
 Схема управления угловой скоростью двигателя постоянного тока
Схема управления угловой скоростью двигателя постоянного тока
 Схема управления двигателем по угловой скорости
Схема управления двигателем по угловой скорости
 Схема управления температурой воздуха
Схема управления температурой воздуха
 Схема управления объектом
Схема управления объектом
 Апериодическое звено 1 -го порядка
Апериодическое звено 1 -го порядка
 Апериодические звенья 2 -го порядка
Апериодические звенья 2 -го порядка
 Колебательные звенья
Колебательные звенья
 Интегрирующие звенья
Интегрирующие звенья
 Изодромные звенья
Изодромные звенья
 Идеальные дифференцирующие звенья
Идеальные дифференцирующие звенья
 Дифференцирующие звенья с замедлением
Дифференцирующие звенья с замедлением
 Разомкнутая система автоматического управления электроприводом 1 -электродвигатель; 2 - реечная передача. x- обобщенная координата; F – внешняя сила;
Разомкнутая система автоматического управления электроприводом 1 -электродвигатель; 2 - реечная передача. x- обобщенная координата; F – внешняя сила;