8e9ed197d577ac63a822e44627c0ad91.ppt
- Количество слайдов: 62
 Technion - Israel Institute of Technology Department of Electrical Engineering Vision & Image Sciences Laboratory http: // visl. technion. ac. il November 2003
Technion - Israel Institute of Technology Department of Electrical Engineering Vision & Image Sciences Laboratory http: // visl. technion. ac. il November 2003
 Introduction Fields of interest Vision Research Computer Vision Image Processing Pattern Recognition Computer Graphics Biological Signals
Introduction Fields of interest Vision Research Computer Vision Image Processing Pattern Recognition Computer Graphics Biological Signals
 Introduction Academic Staff Prof. Y. Y. Zeevi Prof. R. Meir Dr. M. Porat Dr. A. Tal Dr. M. Zibulevsky Dr. Y. Shechner Dr. Y. Eldar
Introduction Academic Staff Prof. Y. Y. Zeevi Prof. R. Meir Dr. M. Porat Dr. A. Tal Dr. M. Zibulevsky Dr. Y. Shechner Dr. Y. Eldar
 Introduction Technical Staff Eng. Johanan Erez Eng. Eli Appelboim Eng. Ina Krinsky Tech. Aharon Yacoby Student assistents
Introduction Technical Staff Eng. Johanan Erez Eng. Eli Appelboim Eng. Ina Krinsky Tech. Aharon Yacoby Student assistents
 Introduction Activity • 10 -15 grad. students. • ~ 30 undergr. projects / semester. • ~100 lab experiments / semester.
Introduction Activity • 10 -15 grad. students. • ~ 30 undergr. projects / semester. • ~100 lab experiments / semester.
 Blind Source Separation
Blind Source Separation
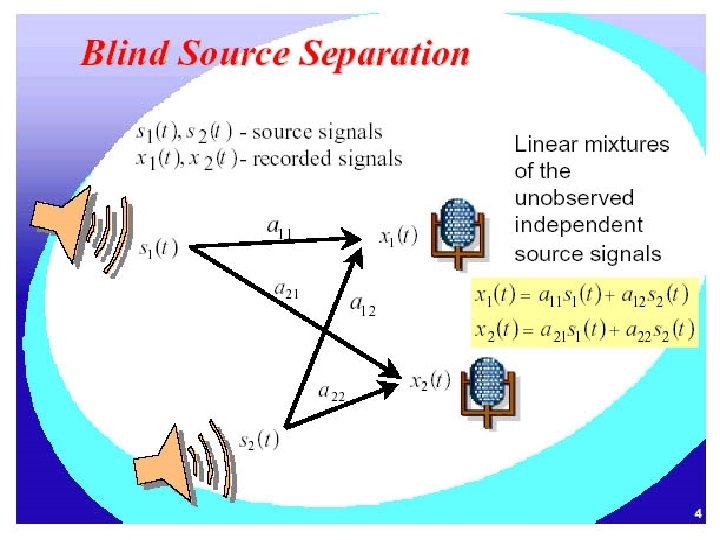
 Blind Source Separation The blind source separation problem is to extract the underlying source signals from a set of linear mixtures, where the mixing matrix is unknown. This situation is common in acoustics, radio, medical signal and image processing, hyperspectral imaging, etc.
Blind Source Separation The blind source separation problem is to extract the underlying source signals from a set of linear mixtures, where the mixing matrix is unknown. This situation is common in acoustics, radio, medical signal and image processing, hyperspectral imaging, etc.
עיוורת( של תמונות Blind Source Separation MIX Signal sources BSS Mixed signals") הפרדה )עיוורת( של תמונות Blind Source Separation MIX Signal sources BSS Mixed signals Separated signals
הפרדה )עיוורת( של תמונות Blind Source Separation MIX Signal sources BSS Mixed signals Separated signals
 Blind Source Separation Applications: • Audio Signals Separation. • Mixed Images. • f. MRI Images. • Biological Signals. • Hyperspectral Images. • …
Blind Source Separation Applications: • Audio Signals Separation. • Mixed Images. • f. MRI Images. • Biological Signals. • Hyperspectral Images. • …
 Blind Separation of Audio Sources Audio Signals: § Sources § Mixed Signals § Separated Signals
Blind Separation of Audio Sources Audio Signals: § Sources § Mixed Signals § Separated Signals
 Blind Separation of Images
Blind Separation of Images
 Blind Source Separation of f. MRI Images
Blind Source Separation of f. MRI Images
 Simulator f. MRI
Simulator f. MRI
 f. MRI Simulator - Results
f. MRI Simulator - Results
 BSS of f. MRI – Simulation Results
BSS of f. MRI – Simulation Results
 Blind Source Separation of f. MRI Images
Blind Source Separation of f. MRI Images
 Blind Source Separation of f. MRI Images
Blind Source Separation of f. MRI Images
 Blind Source Separation of EEG Signals
Blind Source Separation of EEG Signals
 Hyperspectral Analysis using Blind Source Separation
Hyperspectral Analysis using Blind Source Separation
 Combining classical Blind Source Separation with spatial approach to the Hyperspectral data.
Combining classical Blind Source Separation with spatial approach to the Hyperspectral data.
 Computer Vision
Computer Vision
 Recognition and Tracking of corners with SUSAN Algorithm
Recognition and Tracking of corners with SUSAN Algorithm
 Vision-based Door Control No target Closed door Opened door Approaching target Passing target
Vision-based Door Control No target Closed door Opened door Approaching target Passing target
 Slides from Video lecture
Slides from Video lecture
 Computer Vision
Computer Vision
 Computer Vision short spur dirt open mousebite pinhole
Computer Vision short spur dirt open mousebite pinhole
 LEGO Lab Wireless connection between vehicle and PC Vision based Navigating
LEGO Lab Wireless connection between vehicle and PC Vision based Navigating
 Autonomous Vehicles DEMO 1 DEMO 2
Autonomous Vehicles DEMO 1 DEMO 2
 Autonomous Vehicles
Autonomous Vehicles
 Autonomous Vehicles
Autonomous Vehicles
 Soccer Game Tracking DEMO 1 DEMO 2
Soccer Game Tracking DEMO 1 DEMO 2
או קו אופק(:") גוף מתחת לקו חוף )או קו אופק(:
גוף מתחת לקו חוף )או קו אופק(:
 סיכום סוגי התרחישים: ים מלא ים ומטרה קו חוף מטרה מתחת מטרה מעל
סיכום סוגי התרחישים: ים מלא ים ומטרה קו חוף מטרה מתחת מטרה מעל
 Naval Targets § Demo 1 § Demo 2 § Demo 3
Naval Targets § Demo 1 § Demo 2 § Demo 3
 Pattern Recognition
Pattern Recognition
 Traffic Sign Recognition
Traffic Sign Recognition

 הדגמה לסיווג
הדגמה לסיווג
 Classification by Support Vector Machines
Classification by Support Vector Machines
 אחוזי סיווג לשלב תמרור בתוך קבוצה % 35. 29 % 76. 79 ? % 76. 79 % 4858. 89 ? Yes % 4858. 89 ? % 4858. 89 Road ? Sign % 4858. 89 % 7063. 89 ? No % 7063. 89 % 4858. 89 % 5008. 59 % 4858. 89 ?
אחוזי סיווג לשלב תמרור בתוך קבוצה % 35. 29 % 76. 79 ? % 76. 79 % 4858. 89 ? Yes % 4858. 89 ? % 4858. 89 Road ? Sign % 4858. 89 % 7063. 89 ? No % 7063. 89 % 4858. 89 % 5008. 59 % 4858. 89 ?
 License Plate Recognition
License Plate Recognition
 Neural network architecture 20 pixels 10 pixels Input Layer 20 x 10 = 200 neurons Middle Layer 20 neurons Output Layer 10 neurons
Neural network architecture 20 pixels 10 pixels Input Layer 20 x 10 = 200 neurons Middle Layer 20 neurons Output Layer 10 neurons
 Digital Cameras Adaptive Gain Control by i-sight Camera
Digital Cameras Adaptive Gain Control by i-sight Camera
 Adaptive Sensitivity
Adaptive Sensitivity

 Hardware Implementations using Trimedia Multimedia Processor Video IN Video OUT
Hardware Implementations using Trimedia Multimedia Processor Video IN Video OUT
 Superresolution
Superresolution
 Image Enhancement by Superresolution Source image מקור Enhanced image
Image Enhancement by Superresolution Source image מקור Enhanced image
 Superresolution - results
Superresolution - results
 Image Enhancement by Diffusion
Image Enhancement by Diffusion
 Indexing of image databases
Indexing of image databases
 Image Indexing by contour examination Which fish looks like: ? ? ?
Image Indexing by contour examination Which fish looks like: ? ? ?
 Contour Signature § The goal: to get a one-dimensional description of the image - Signature. § The method: sampling points on the curve, and finding the outer angel of each three points. Sl(m) = 30° m m+1 m-1 k+1 k Sl(k)= -80°
Contour Signature § The goal: to get a one-dimensional description of the image - Signature. § The method: sampling points on the curve, and finding the outer angel of each three points. Sl(m) = 30° m m+1 m-1 k+1 k Sl(k)= -80°
 D) A)") Image Indexing - Results C) D) A)
Image Indexing - Results C) D) A)
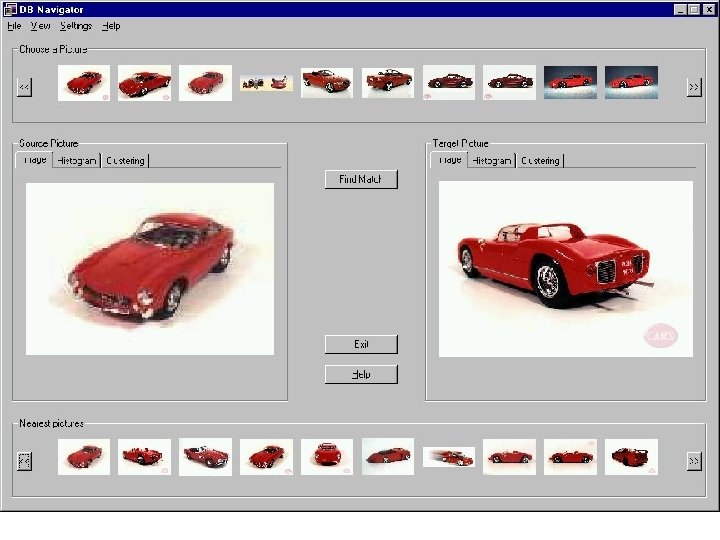
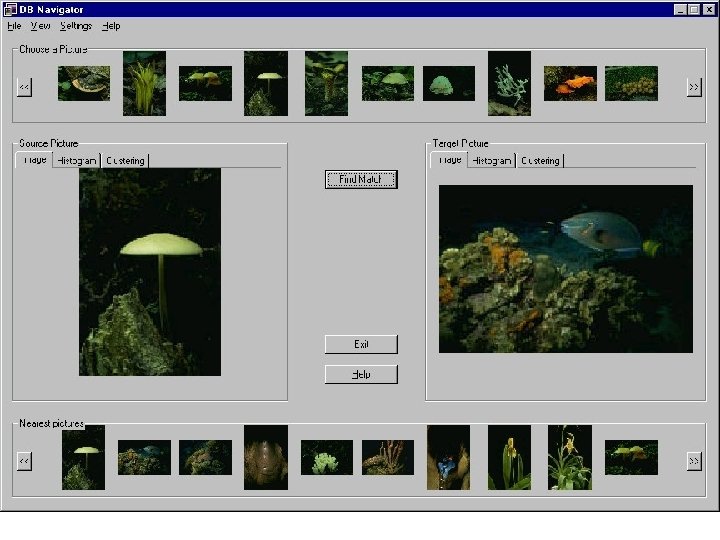
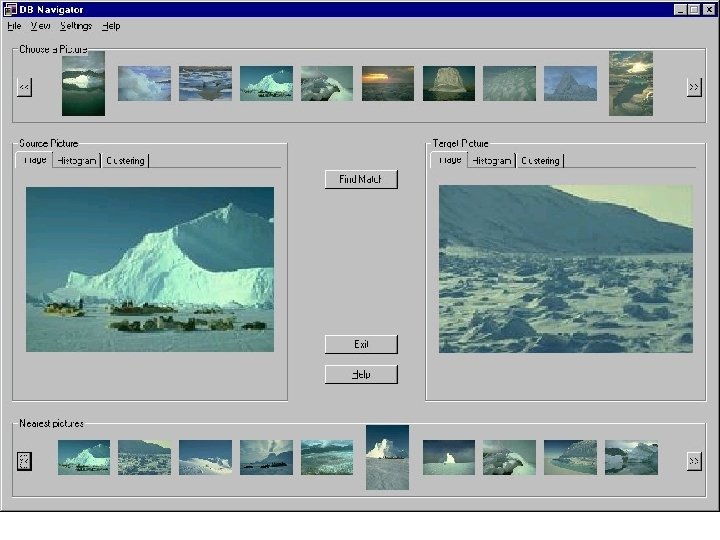
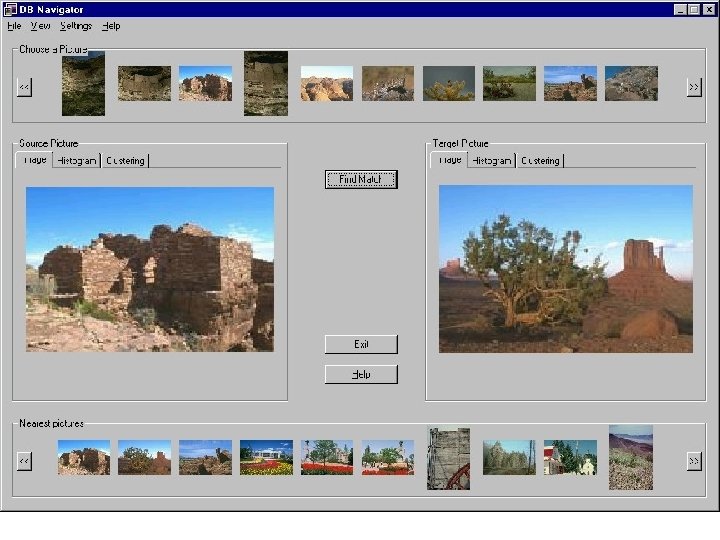
 Indexing of images according to color signature
Indexing of images according to color signature
 Image Indexing
Image Indexing