Presentation_KM_2.pptx
- Количество слайдов: 41

 • • СТРУКТУРНО-ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ Универсальное "ядро" системы управления: 1 - комплекс командных приборов (гиростабилизированная платформа, акселерометры, преобразователи, следящие системы, источники питания) 2, 2 а - бортовой цифровой вычислительный комплекс Типовые приборы и подсистемы, адаптируемые к конкретному ракетно-космическому комплексу: 3 - управление рулевыми приводами 4 - управление приводами регулирования двигательных установок 5 - управление автоматикой двигательных установок и пневмогидравлических систем 6 - управление пирозапалами 7 - управление другими бортовыми системами (телеизмерений, командной радиолинией, терморегулирования и т. д. ) 8 - коммутаторы силового электропитания 9 - аппаратура спутниковой навигации Универсальный наземный проверочно-пусковой комплекс для всех видов испытаний СУ на заводах-изготовителях, технических и стартовых позициях: 10 - необслуживаемая аппаратура 11 - аппаратура управления, отображения и регистрации
• • СТРУКТУРНО-ФУНКЦИОНАЛЬНАЯ СХЕМА СИСТЕМЫ УПРАВЛЕНИЯ Универсальное "ядро" системы управления: 1 - комплекс командных приборов (гиростабилизированная платформа, акселерометры, преобразователи, следящие системы, источники питания) 2, 2 а - бортовой цифровой вычислительный комплекс Типовые приборы и подсистемы, адаптируемые к конкретному ракетно-космическому комплексу: 3 - управление рулевыми приводами 4 - управление приводами регулирования двигательных установок 5 - управление автоматикой двигательных установок и пневмогидравлических систем 6 - управление пирозапалами 7 - управление другими бортовыми системами (телеизмерений, командной радиолинией, терморегулирования и т. д. ) 8 - коммутаторы силового электропитания 9 - аппаратура спутниковой навигации Универсальный наземный проверочно-пусковой комплекс для всех видов испытаний СУ на заводах-изготовителях, технических и стартовых позициях: 10 - необслуживаемая аппаратура 11 - аппаратура управления, отображения и регистрации
 Задачи системы управления по обеспечению перемещения объекта к цели Задача управления ориентацией объекта Задача навигации (определение координат и скоростей объекта по информации о его ускорениях)
Задачи системы управления по обеспечению перемещения объекта к цели Задача управления ориентацией объекта Задача навигации (определение координат и скоростей объекта по информации о его ускорениях)
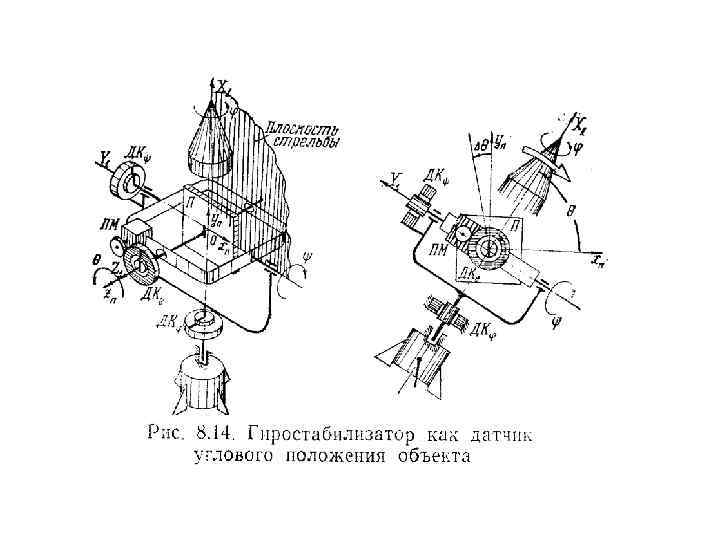
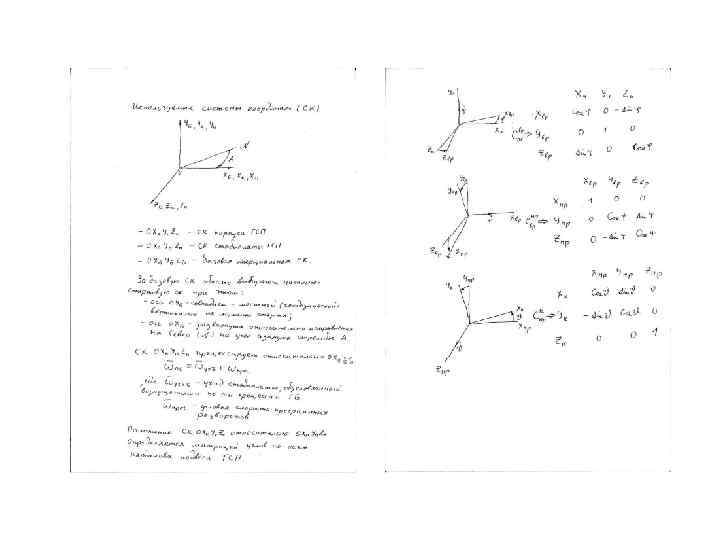
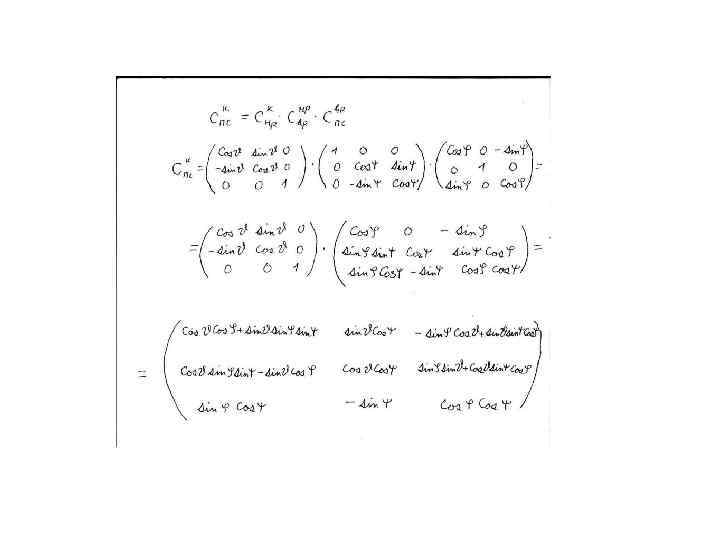
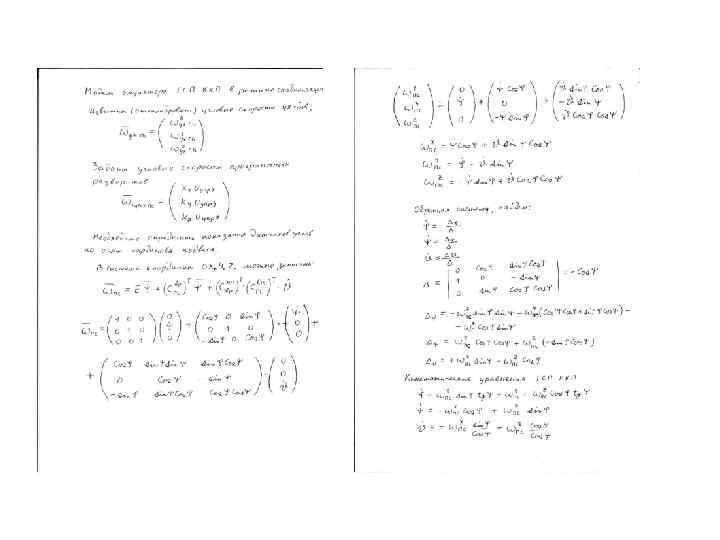
 можно рассматривать как твердое тело с шестью степенями свободы. Движение") Подвижный объект (ПО) можно рассматривать как твердое тело с шестью степенями свободы. Движение ПО складывается из поступательного движения его центра масс и вращательного движения вокруг последнего. Поступательное движение определяется координатами центра масс (в общем случае его радиус-вектором Rr), векторами линейной скорости и ускорения. В качестве параметров, определяющих угловое положение ПО, движущихся вблизи поверхности Земли, используют углы, которые отсчитывают от горизонтного трехгранника с началом в центре масс ПО и с географической ориентацией в азимуте. Условно можно считать, что задачи, связанные с поступательным движением объекта, решаются с помощью навигационных систем, а угловое положение ПО определяется системой ориентации. В общем случае ориентацию подвижного объекта определяют относительно некоторой неподвижной (инерциальной) системы координат (ИСК). Для решения задачи ориентации на борту объекта необходимо иметь аналог ИСК, который может быть либо физическим в виде твердого тела неподвижного относительно ИСК (платформа, у которой угловая скорость в ИСК равна нулю), либо аналитическим, реализуемым в вычислительном устройстве, которое непрерывно вырабатывает параметры ориентации относительно ИСК.
Подвижный объект (ПО) можно рассматривать как твердое тело с шестью степенями свободы. Движение ПО складывается из поступательного движения его центра масс и вращательного движения вокруг последнего. Поступательное движение определяется координатами центра масс (в общем случае его радиус-вектором Rr), векторами линейной скорости и ускорения. В качестве параметров, определяющих угловое положение ПО, движущихся вблизи поверхности Земли, используют углы, которые отсчитывают от горизонтного трехгранника с началом в центре масс ПО и с географической ориентацией в азимуте. Условно можно считать, что задачи, связанные с поступательным движением объекта, решаются с помощью навигационных систем, а угловое положение ПО определяется системой ориентации. В общем случае ориентацию подвижного объекта определяют относительно некоторой неподвижной (инерциальной) системы координат (ИСК). Для решения задачи ориентации на борту объекта необходимо иметь аналог ИСК, который может быть либо физическим в виде твердого тела неподвижного относительно ИСК (платформа, у которой угловая скорость в ИСК равна нулю), либо аналитическим, реализуемым в вычислительном устройстве, которое непрерывно вырабатывает параметры ориентации относительно ИСК.
 Техническими требованиями, предъявляемыми к комплексу командных приборов по назначению, являются: ‒ создание на борту ракеты инерциальной системы координат; ‒ измерение углов разворота ракеты относительно этой системы координат; ‒ измерение приращения кажущейся скорости ракеты в проекциях на заданные направления осей чувствительности акселерометров; ‒ измерение координат визируемых навигационных звезд; ‒ выдачи в БАСУ сигналов, пропорциональных измеренным величинам; ‒ осуществление доворота стабилизированной платформы с установленными на ней акселерометрами и астровизирами в инерциальном пространстве с целью начальной выставки в стартовую систему координат или в положение визирования навигационных звезд; ‒ прием из БАСУ команд управления и реализация в соответствии с ними заданных режимов работы; ‒ передача в систему телеизмерений информации о функционировании ККП в рабочих режимах.
Техническими требованиями, предъявляемыми к комплексу командных приборов по назначению, являются: ‒ создание на борту ракеты инерциальной системы координат; ‒ измерение углов разворота ракеты относительно этой системы координат; ‒ измерение приращения кажущейся скорости ракеты в проекциях на заданные направления осей чувствительности акселерометров; ‒ измерение координат визируемых навигационных звезд; ‒ выдачи в БАСУ сигналов, пропорциональных измеренным величинам; ‒ осуществление доворота стабилизированной платформы с установленными на ней акселерометрами и астровизирами в инерциальном пространстве с целью начальной выставки в стартовую систему координат или в положение визирования навигационных звезд; ‒ прием из БАСУ команд управления и реализация в соответствии с ними заданных режимов работы; ‒ передача в систему телеизмерений информации о функционировании ККП в рабочих режимах.
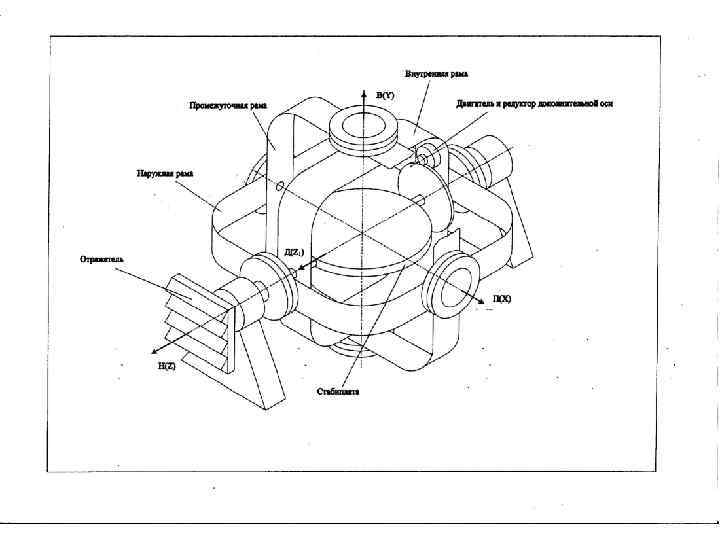
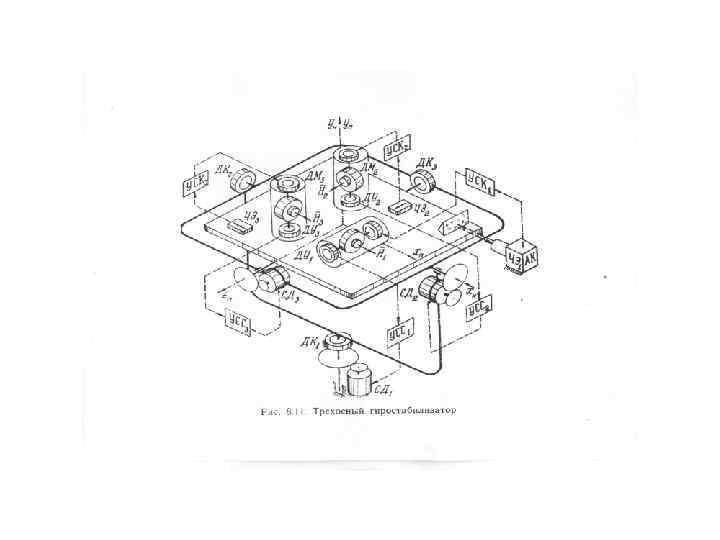
 2 – Рама Т 3 – ПС 4") 1 – ДКВ (ось В) 2 – Рама Т 3 – ПС 4 – ДКР (ось Р) 5 – Вентилятор (2 шт. ) 6 – Корпус прибора 7 – ДКТ (ось Т) 8 – ГБ Р 9 – ГБ В 10 – ЧЭ акс. Y 11 – ДМПТ_В, ПК 12 – Рама Р 13 – ЧЭ акс. 1 14 – ЧЭ акс. Х 15 – ДМПТ_Р 16 – ЧЭ акс. 2 17 – ДМПТ_Т 18 – ЧЭ акс. Z 16 – ЧЭ акс. 2 17 – ДМПТ_Т 18 – ЧЭ акс. Z 19 – ГБ Т Кинематическая схема ГСП
1 – ДКВ (ось В) 2 – Рама Т 3 – ПС 4 – ДКР (ось Р) 5 – Вентилятор (2 шт. ) 6 – Корпус прибора 7 – ДКТ (ось Т) 8 – ГБ Р 9 – ГБ В 10 – ЧЭ акс. Y 11 – ДМПТ_В, ПК 12 – Рама Р 13 – ЧЭ акс. 1 14 – ЧЭ акс. Х 15 – ДМПТ_Р 16 – ЧЭ акс. 2 17 – ДМПТ_Т 18 – ЧЭ акс. Z 16 – ЧЭ акс. 2 17 – ДМПТ_Т 18 – ЧЭ акс. Z 19 – ГБ Т Кинематическая схема ГСП

 РАЗРАБОТКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И СИСТЕМ
РАЗРАБОТКА ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И СИСТЕМ
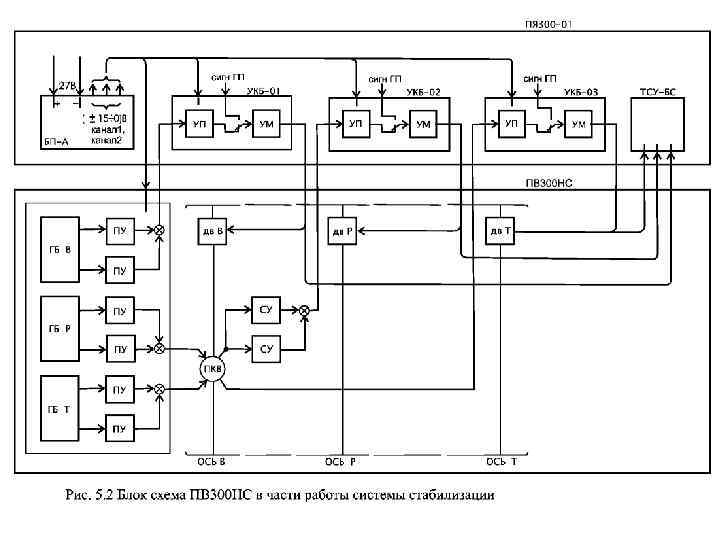
 предназначена для компенсации возмущающих моментов, действующих по осям карданова") Система стабилизации Система стабилизации` (СС) предназначена для компенсации возмущающих моментов, действующих по осям карданова подвеса ГСП, и обеспечивает сохранение неизменной ориентации в пространстве стабилизированной платформы (ПС). Система стабилизации состоит из трех каналов, обеспечивающих стабилизацию относительно осей В, Р, Т карданова подвеса. В электронных блоках каждого канала предусмотрены входы для сигналов системы грубого приведения (ГП). Система обладает качеством, близким к астатизму первого порядка по отношению к возмущающим моментам, действующим относительно осей карданова подвеса. Статическая ошибка при возмущениях 2000 Гсм не превышает 2 угл. сек, динамическая ошибка в переходном процессе при отработке ступенчатого воздействия Мв=2000· 1[t] Гсм не более 2 угл. мин. , при этом время переходного процесса не превышает 0, 8 с. Максимальные амплитудные искажения ГСП, как измерителя углового положения изделия, при движения основания с амплитудой 0, 1 угл. град не превышают 20%, при этом фазовые запаздывания не превышают 20º.
Система стабилизации Система стабилизации` (СС) предназначена для компенсации возмущающих моментов, действующих по осям карданова подвеса ГСП, и обеспечивает сохранение неизменной ориентации в пространстве стабилизированной платформы (ПС). Система стабилизации состоит из трех каналов, обеспечивающих стабилизацию относительно осей В, Р, Т карданова подвеса. В электронных блоках каждого канала предусмотрены входы для сигналов системы грубого приведения (ГП). Система обладает качеством, близким к астатизму первого порядка по отношению к возмущающим моментам, действующим относительно осей карданова подвеса. Статическая ошибка при возмущениях 2000 Гсм не превышает 2 угл. сек, динамическая ошибка в переходном процессе при отработке ступенчатого воздействия Мв=2000· 1[t] Гсм не более 2 угл. мин. , при этом время переходного процесса не превышает 0, 8 с. Максимальные амплитудные искажения ГСП, как измерителя углового положения изделия, при движения основания с амплитудой 0, 1 угл. град не превышают 20%, при этом фазовые запаздывания не превышают 20º.
 – ОТ ГРЕЧЕСКИХ СЛОВ (ГИРОС) – ВРАЩЕНИЕ, (СКОПЕЙН)") ИСТОРИЧЕСКАЯ СПРАВКА “КЛАССИЧЕСКИЙ” ГИРОСКОП (БЫСТРОВРАЩАЮЩИЙСЯ ВОЛЧОК) – ОТ ГРЕЧЕСКИХ СЛОВ (ГИРОС) – ВРАЩЕНИЕ, (СКОПЕЙН) – ВИДЕТЬ. ГИРОСКОП ВОЗНИК КАК ИГРУШКА В ДРЕВНЕМ ЕГИПТЕ И ВЕЛ СЕБЯ ОЧЕНЬ НЕОБЫЧНО. ОБЪЯСНЕНИЕ ПРИЧИН НЕОБЫЧНОГО ПОВЕДЕНИЯ (НАПРИМЕР, УСТОЙЧИВОСТИ) ПОЯВИЛИСЬ ТОЛЬКО ПОСЛЕ ТОГО, КАК Л. ЭЙЛЕР (1707 -1783) СОЗДАЛ ОСНОВЫ МЕХАНИКИ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА, А Ж. Л. ЛАГРАНЖ (1736 -1813) И ДРУГИЕ УЧЕНЫЕ РАЗВИЛИ ЭТИ ОСНОВЫ. ТЕОРИЯ “КЛАССИЧЕСКИХ” ГИРОСКОПОВ ОСНОВЫВАЕТСЯ НА ПОЛОЖЕНИЯХ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ О СФЕРИЧЕСКОМ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА (РИС. 1. 1). СПОСОБ ЗАКРЕПЛЕНИЯ ТЕЛА В ТОЧКЕ РЕАЛИЗОВАН В ВИДЕ ВНЕШНЕГО И ВНУТРЕННЕГО КАРДАНОВОГО ПОДВЕСА. а) б) в) Рис. 1. 1. Способы реализации сферического движения тела с помощью закрепления в точке (а); внешнего (б) и внутреннего (в) карданового подвеса: 1 – ротор, 2, 3 – внутренняя и наружная рамки, 4 – ось вращения ротора, 5 – основание
ИСТОРИЧЕСКАЯ СПРАВКА “КЛАССИЧЕСКИЙ” ГИРОСКОП (БЫСТРОВРАЩАЮЩИЙСЯ ВОЛЧОК) – ОТ ГРЕЧЕСКИХ СЛОВ (ГИРОС) – ВРАЩЕНИЕ, (СКОПЕЙН) – ВИДЕТЬ. ГИРОСКОП ВОЗНИК КАК ИГРУШКА В ДРЕВНЕМ ЕГИПТЕ И ВЕЛ СЕБЯ ОЧЕНЬ НЕОБЫЧНО. ОБЪЯСНЕНИЕ ПРИЧИН НЕОБЫЧНОГО ПОВЕДЕНИЯ (НАПРИМЕР, УСТОЙЧИВОСТИ) ПОЯВИЛИСЬ ТОЛЬКО ПОСЛЕ ТОГО, КАК Л. ЭЙЛЕР (1707 -1783) СОЗДАЛ ОСНОВЫ МЕХАНИКИ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА, А Ж. Л. ЛАГРАНЖ (1736 -1813) И ДРУГИЕ УЧЕНЫЕ РАЗВИЛИ ЭТИ ОСНОВЫ. ТЕОРИЯ “КЛАССИЧЕСКИХ” ГИРОСКОПОВ ОСНОВЫВАЕТСЯ НА ПОЛОЖЕНИЯХ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ О СФЕРИЧЕСКОМ ДВИЖЕНИИ ТВЕРДОГО ТЕЛА (РИС. 1. 1). СПОСОБ ЗАКРЕПЛЕНИЯ ТЕЛА В ТОЧКЕ РЕАЛИЗОВАН В ВИДЕ ВНЕШНЕГО И ВНУТРЕННЕГО КАРДАНОВОГО ПОДВЕСА. а) б) в) Рис. 1. 1. Способы реализации сферического движения тела с помощью закрепления в точке (а); внешнего (б) и внутреннего (в) карданового подвеса: 1 – ротор, 2, 3 – внутренняя и наружная рамки, 4 – ось вращения ротора, 5 – основание
 Историческое определение Традиционно гироскоп – устройство, состоящее из быстровращающегося динамически симметричного ротора и подвеса, обеспечивающего движение ротору вокруг неподвижной точки, лежащей на его главной оси. Точка 0 пересечения осей вращения карданового подвеса называется - точка подвеса. Гироскоп свободный, если сумма моментов всех сил относительно любой из осей равна нулю и вращение происходит по инерции. Одна из первых конструкций гироскопа в кардановом подвесе – гироскоп Боненбергера (1802). Гироскоп, центр тяжести которого совпадает с точкой подвеса или c точкой опоры – астатический – гироскоп Эйлера. Координаты центра тяжести такого гироскопа в системе главных центральных осей 0 xyz: xc= yc= zc= 0. Гироскоп, центр тяжести которого смещен относительно точки подвеса или точки опоры вдоль главной оси вращения ротора (yс = zс = 0, xc = a) – тяжелый – гироскоп Лагранжа. Гироскоп, центр тяжести которого смещен относительно точки подвеса или точки опоры вдоль его других главных осей инерции (например, xс = zс = 0, yc ≠ 0, B=C=2 A) – несимметричный – гироскоп Ковалевской.
Историческое определение Традиционно гироскоп – устройство, состоящее из быстровращающегося динамически симметричного ротора и подвеса, обеспечивающего движение ротору вокруг неподвижной точки, лежащей на его главной оси. Точка 0 пересечения осей вращения карданового подвеса называется - точка подвеса. Гироскоп свободный, если сумма моментов всех сил относительно любой из осей равна нулю и вращение происходит по инерции. Одна из первых конструкций гироскопа в кардановом подвесе – гироскоп Боненбергера (1802). Гироскоп, центр тяжести которого совпадает с точкой подвеса или c точкой опоры – астатический – гироскоп Эйлера. Координаты центра тяжести такого гироскопа в системе главных центральных осей 0 xyz: xc= yc= zc= 0. Гироскоп, центр тяжести которого смещен относительно точки подвеса или точки опоры вдоль главной оси вращения ротора (yс = zс = 0, xc = a) – тяжелый – гироскоп Лагранжа. Гироскоп, центр тяжести которого смещен относительно точки подвеса или точки опоры вдоль его других главных осей инерции (например, xс = zс = 0, yc ≠ 0, B=C=2 A) – несимметричный – гироскоп Ковалевской.
 б) в) г) Гироскопы Боненбергера 1802 (а), Эйлера (б), Лагранжа (в) и Ковалевской") а) б) в) г) Гироскопы Боненбергера 1802 (а), Эйлера (б), Лагранжа (в) и Ковалевской (г)
а) б) в) г) Гироскопы Боненбергера 1802 (а), Эйлера (б), Лагранжа (в) и Ковалевской (г)
 Физическая природа гироскопических явлений , Физическая природа гироскопических явлений заключается в действии Кориолисовых сил инерции на быстровращающееся твердое тело с кинетическим моментом H при наличии переносной угловой скорости e. Рассмотрим однородный круглый диск радиуса R и толщины b, вращающийся с угловой скоростью Ω вокруг оси z (рис. 1. 3). Пусть этот диск начал вращаться вокруг оси x с угловой скоростью x. Выберем элементарную массу диска: где – плотность; d. V- элементарный объем. Ускорение Кориолиса массы dm: где - вектор относительной скорости
Физическая природа гироскопических явлений , Физическая природа гироскопических явлений заключается в действии Кориолисовых сил инерции на быстровращающееся твердое тело с кинетическим моментом H при наличии переносной угловой скорости e. Рассмотрим однородный круглый диск радиуса R и толщины b, вращающийся с угловой скоростью Ω вокруг оси z (рис. 1. 3). Пусть этот диск начал вращаться вокруг оси x с угловой скоростью x. Выберем элементарную массу диска: где – плотность; d. V- элементарный объем. Ускорение Кориолиса массы dm: где - вектор относительной скорости
 Эпюра распределения w. K по ободу ротора") К пояснению физической природы гироскопических явлений (РМ) Эпюра распределения w. K по ободу ротора (при r = R) Модуль ускорения Кориолиса:
К пояснению физической природы гироскопических явлений (РМ) Эпюра распределения w. K по ободу ротора (при r = R) Модуль ускорения Кориолиса:
 Модуль элементарной силы инерции Кориолиса: Модуль элементарного момента силы инерции Кориолиса: . Интегрируя полученное выражение для d. My, получим модуль главного момента Кориолисовых сил инерции, который и представляет собой гироскопический момент MГ: где: H = C - кинетический момент ротора, C = m. R 2/2 – момент инерции ротора относительно оси z, m = b R 2 – масса. В векторном виде, полагая . , для гироскопического момента относительно оси y:
Модуль элементарной силы инерции Кориолиса: Модуль элементарного момента силы инерции Кориолиса: . Интегрируя полученное выражение для d. My, получим модуль главного момента Кориолисовых сил инерции, который и представляет собой гироскопический момент MГ: где: H = C - кинетический момент ротора, C = m. R 2/2 – момент инерции ротора относительно оси z, m = b R 2 – масса. В векторном виде, полагая . , для гироскопического момента относительно оси y:
 Компьютерные модели гироскопических эфектов
Компьютерные модели гироскопических эфектов
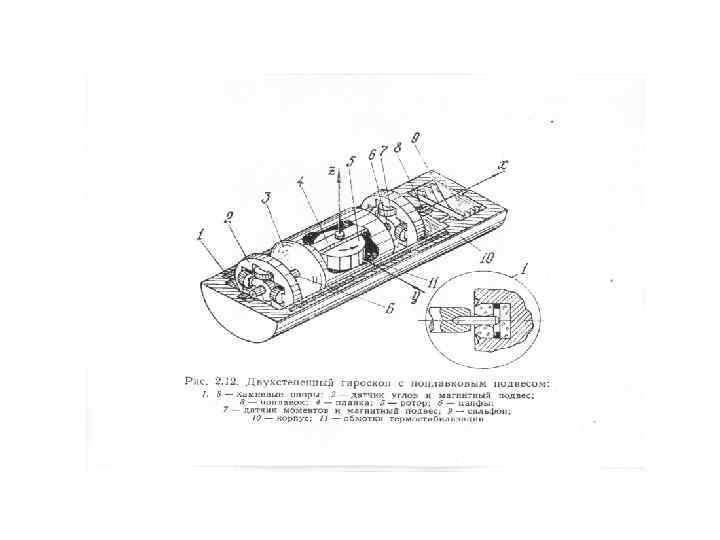
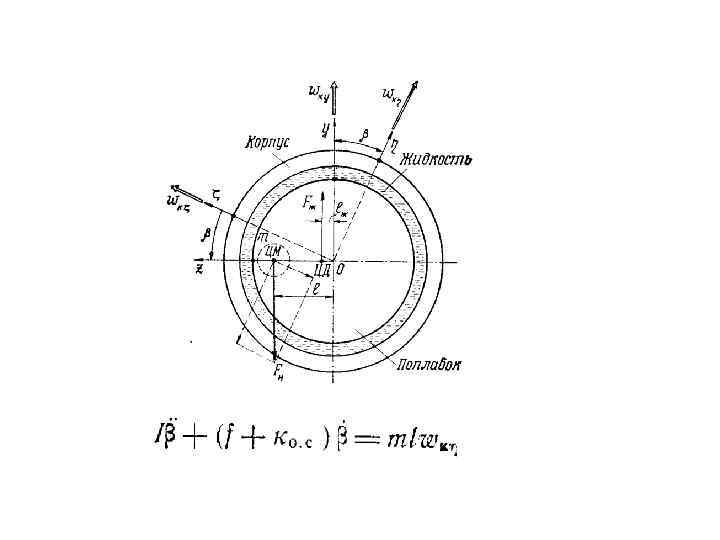
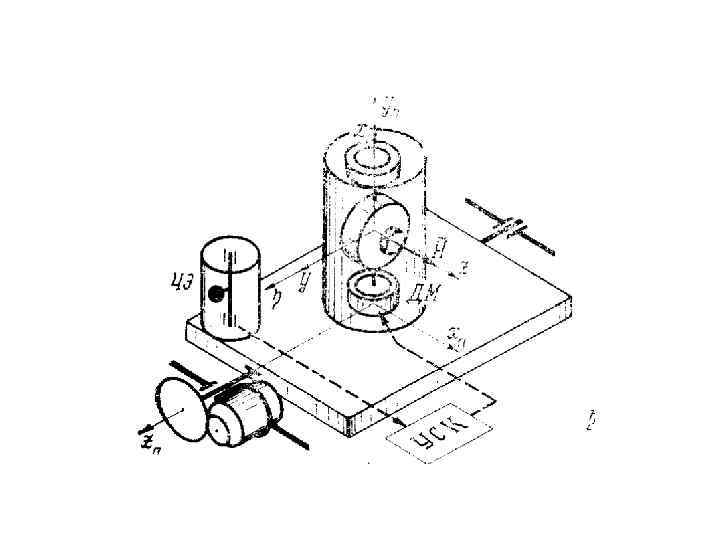
 Принцип действия поплавкового гироскопа основан на том, что быстровращающийся ротор с кинетическим моментом Н прецессирует под действием возмущающей силы, приложенной к его корпусу и направленной по его оси чувствительности (перпендикуляру к оси кинетического момента и оси подвеса). • Взвешивание поплавка в вязкой жидкости позволяет минимизировать сухое трение в опорах подвеса, повышает вибро - и ударостойкость прибора. • Поплавковые гироскопы имеют точность до 10 -3 10 -5 град/час, выдерживают вибрационную нагрузку до 15 g при частотах колебаний объекта до 2 к. Гц и ударные нагрузки до 100 g , что обуславливает их широкое применение на самолетах и ракетах.
Принцип действия поплавкового гироскопа основан на том, что быстровращающийся ротор с кинетическим моментом Н прецессирует под действием возмущающей силы, приложенной к его корпусу и направленной по его оси чувствительности (перпендикуляру к оси кинетического момента и оси подвеса). • Взвешивание поплавка в вязкой жидкости позволяет минимизировать сухое трение в опорах подвеса, повышает вибро - и ударостойкость прибора. • Поплавковые гироскопы имеют точность до 10 -3 10 -5 град/час, выдерживают вибрационную нагрузку до 15 g при частотах колебаний объекта до 2 к. Гц и ударные нагрузки до 100 g , что обуславливает их широкое применение на самолетах и ракетах.
 Режим выставки в заданное положение Режим") Система стабилизации Режим ГП Режим НО (начальной ориентации) Режим выставки в заданное положение Режим ИУ (измерение и удержание) Режим ПР программных разворотов Режим моделирования ИСК в полете Структура режимов системы стабилизации
Система стабилизации Режим ГП Режим НО (начальной ориентации) Режим выставки в заданное положение Режим ИУ (измерение и удержание) Режим ПР программных разворотов Режим моделирования ИСК в полете Структура режимов системы стабилизации
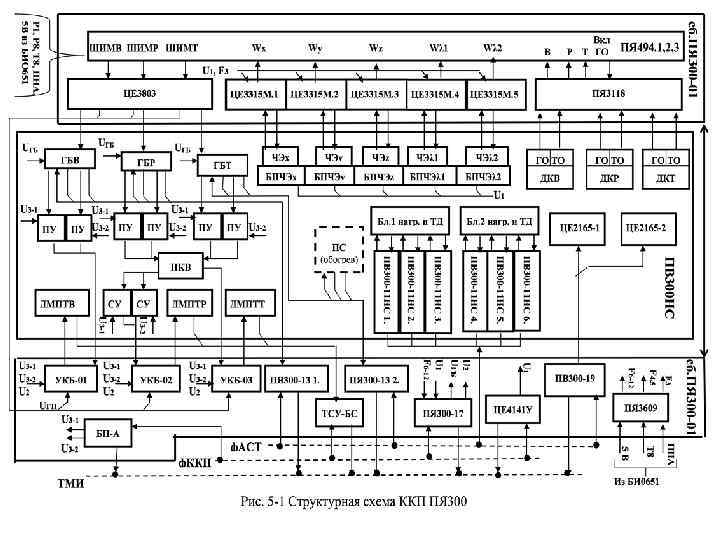
, измерения и удержания") Система грубого и точного приведения, программных разворотов. Система грубого приведения (ГП), измерения и удержания (ИУ), управления прецессионным движением (УПД) предназначена для установки осей стабилизированной платформы в заданное положение, включает в себя прибор ЦЕ 3803, датчики команд по осям В, Р, Т, датчики моментов ГБВ, ГБР, ГБТ, усилители системы стабилизации УКБ-01, УКБ-02, УКБ-03, двигатели стабилизации ДМПТВ, ДМПТР, ДМПТТ и устройство обмена ККП прибор ПЯ 494. В режиме грубого приведения цифровая информация БЦВК преобразуется в устройстве обмена в сигналы ШИМ соответствующего канала – ШИМВ, ШИМР, ШИМТ, которые преобразуются в напряжение постоянного тока и поступают в усилители стабилизации УКБ-01, УКБ-02, УКБ-03. и далее в двигатели стабилизации. В режиме УПД (точные развороты, измерение уходов, автономная азимутальная ориентация) сигналы ШИМ преобразуются в токи, поступающие в датчики момента гироблоков ГБВ, ГБР, ГБТ. В режиме ГП источником информации о текущем положении ПС ГСП служат датчики команд, установленные на осях карданова подвеса. Режим ГП служит для разворотов ПС ГСП в заданные положения. В режиме ИУ источником информации могут служить как датчики команд, так и акселерометры. Во всех случаях управление разворотами осуществляется программно через БЦВК. Переключение режимов работы осуществляется по командам СУ.
Система грубого и точного приведения, программных разворотов. Система грубого приведения (ГП), измерения и удержания (ИУ), управления прецессионным движением (УПД) предназначена для установки осей стабилизированной платформы в заданное положение, включает в себя прибор ЦЕ 3803, датчики команд по осям В, Р, Т, датчики моментов ГБВ, ГБР, ГБТ, усилители системы стабилизации УКБ-01, УКБ-02, УКБ-03, двигатели стабилизации ДМПТВ, ДМПТР, ДМПТТ и устройство обмена ККП прибор ПЯ 494. В режиме грубого приведения цифровая информация БЦВК преобразуется в устройстве обмена в сигналы ШИМ соответствующего канала – ШИМВ, ШИМР, ШИМТ, которые преобразуются в напряжение постоянного тока и поступают в усилители стабилизации УКБ-01, УКБ-02, УКБ-03. и далее в двигатели стабилизации. В режиме УПД (точные развороты, измерение уходов, автономная азимутальная ориентация) сигналы ШИМ преобразуются в токи, поступающие в датчики момента гироблоков ГБВ, ГБР, ГБТ. В режиме ГП источником информации о текущем положении ПС ГСП служат датчики команд, установленные на осях карданова подвеса. Режим ГП служит для разворотов ПС ГСП в заданные положения. В режиме ИУ источником информации могут служить как датчики команд, так и акселерометры. Во всех случаях управление разворотами осуществляется программно через БЦВК. Переключение режимов работы осуществляется по командам СУ.
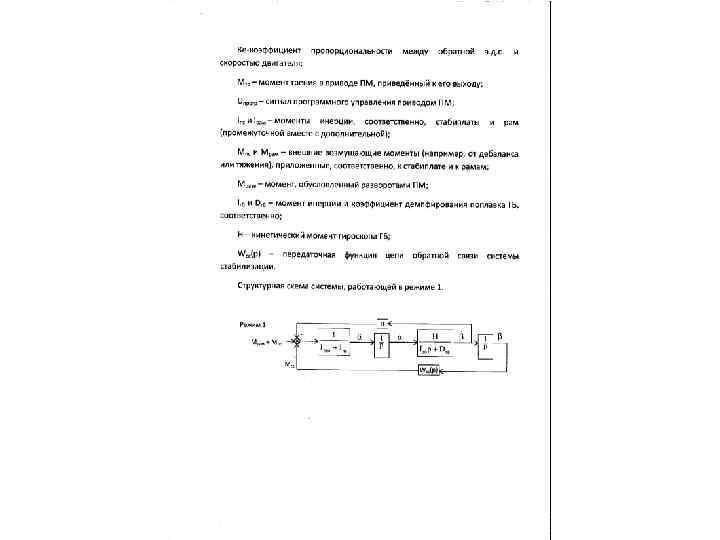
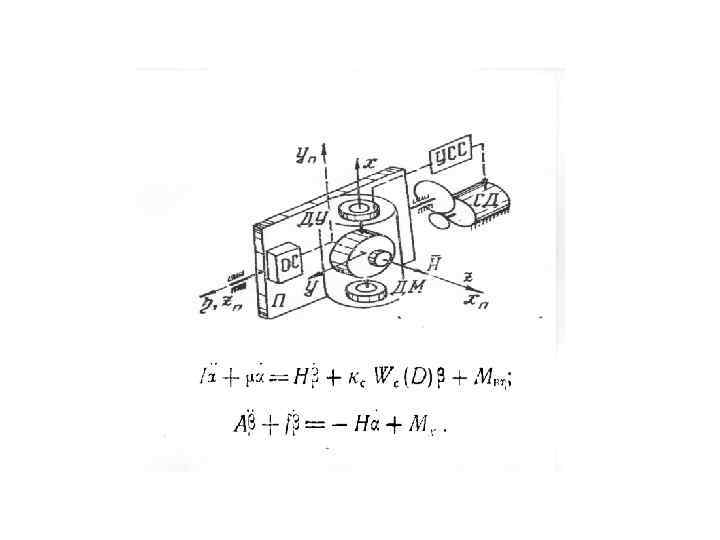
 Система дифференциальных уравнений, описывающих модель режима ГП Модель канала в режиме грубого приведения ККП ϕ УСС УО БЦВК
Система дифференциальных уравнений, описывающих модель режима ГП Модель канала в режиме грубого приведения ККП ϕ УСС УО БЦВК
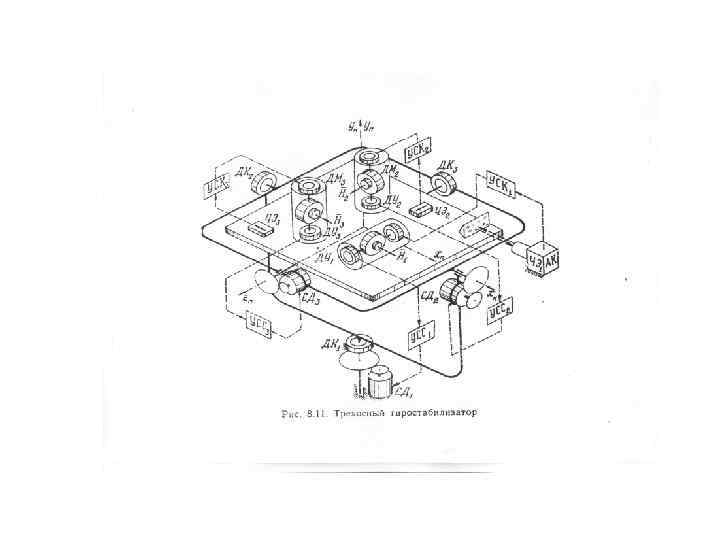
 Система измерения приращения кажущейся скорости содержит пять чувствительных элементов акселерометра маятникого типа ЧЭХ, ЧЭУ, ЧЭZ, ЧЭλ 1, ЧЭλ 2, (приборы ЦЕ 1909 А с блоками питания БПЧЭ) воспринимающих проекции кажущегося ускорения на их измерительные оси, и пять электронных одноканальных приборов (приборов ЦЕ 3315 М), осуществляющих преобразование интеграла тока обратной связи датчика момента акселерометра в последовательность импульсов, частота которых пропорциональна измеряемому ускорению, поступающих через устройство обмена ККП (приборы ПЯ 494) в БЦВМ. Система измерения углов по осям карданова подвеса Система измерения угла рассогласования между осями ГСП и осями изделия содержит: а) три синусно-косинусных вращающихся трансформатора (датчика команд ДКВ, ДКР, ДКТ - приборы ТВ 1 -32 В с: - одно-параполюсной обмоткой (грубый отсчет ГО), - тридцатидвух параполюсной обмоткой (точный отсчет ТО), б) электронный трехканальный прибор фазового преобразователя угла (ФПУ прибор ПЯ 3118). В зависимости от наличия формируемого прибором ПЯ 494 сигнала “Вкл. ГО” прибор обрабатывает информацию грубого канала ГО. Прибор ФПУ осуществляет запитки датчиков команд и преобразует информацию датчиков команд во временные интервалы, которые определяют измеряемый угол и выдает информацию в устройство обмена приборы ПЯ 494. Комплексированные значения ГО и ТО позволяют получить в БЦВК позиционные значения углов.
Система измерения приращения кажущейся скорости содержит пять чувствительных элементов акселерометра маятникого типа ЧЭХ, ЧЭУ, ЧЭZ, ЧЭλ 1, ЧЭλ 2, (приборы ЦЕ 1909 А с блоками питания БПЧЭ) воспринимающих проекции кажущегося ускорения на их измерительные оси, и пять электронных одноканальных приборов (приборов ЦЕ 3315 М), осуществляющих преобразование интеграла тока обратной связи датчика момента акселерометра в последовательность импульсов, частота которых пропорциональна измеряемому ускорению, поступающих через устройство обмена ККП (приборы ПЯ 494) в БЦВМ. Система измерения углов по осям карданова подвеса Система измерения угла рассогласования между осями ГСП и осями изделия содержит: а) три синусно-косинусных вращающихся трансформатора (датчика команд ДКВ, ДКР, ДКТ - приборы ТВ 1 -32 В с: - одно-параполюсной обмоткой (грубый отсчет ГО), - тридцатидвух параполюсной обмоткой (точный отсчет ТО), б) электронный трехканальный прибор фазового преобразователя угла (ФПУ прибор ПЯ 3118). В зависимости от наличия формируемого прибором ПЯ 494 сигнала “Вкл. ГО” прибор обрабатывает информацию грубого канала ГО. Прибор ФПУ осуществляет запитки датчиков команд и преобразует информацию датчиков команд во временные интервалы, которые определяют измеряемый угол и выдает информацию в устройство обмена приборы ПЯ 494. Комплексированные значения ГО и ТО позволяют получить в БЦВК позиционные значения углов.