Студентам - 2.ppt
- Количество слайдов: 67



Станок с декартовым базисом исполнения движений q 3 z q 1 q 2 x

Робот с декартовым базисом исполнения движений

Робот с декартовым базисом исполнения движений

Скелет и кинематическая схема руки человека

Рабочая зона манипулятора r, m 0‹r ‹ 1 q 2, град 0 ‹ q 2 ‹ 90 0 ‹ q 2 ‹ 180 0. 2 ‹ r ‹ 0. 8
")
Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
")
Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
")
Робот с нелинейным базисом исполнения движений (цилиндрическая система координат)
")
Робот с нелинейным базисом исполнения движений (сферическая система координат)
")
Робот с нелинейным базисом исполнения движений (сферическая система координат)
")
Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
")
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L 1= L 2 )
")
Сечение рабочей зоны для двухзвенного манипулятора типа SCARA ( L 1= L 2 ) II I
")
Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
")
Робот с нелинейным базисом исполнения движений (ангулярная система координат типа SCARA)
")
Робот с нелинейным базисом исполнения движений (ангулярная система координат типа PUMA)
")
Робот с нелинейным базисом исполнения движений (ангулярная система координат типа PUMA)

Pentapod - Structure Highly dynamic precision with 5 rotary direct drives Minimized virbrations due to low mass movements Fast accelaration Modular conception allows fast solutuion according to specific customer requirements ВИДЕО!!!
")
Машины с параллельной структурой Первый отечественный гексапод (Новосибирск, 1984)
")
Технологический комплекс «Hexa. Bend» (Институт станков и прессов IWU, Кемниц, Германия)
")
Машины с гибридной структурой Технологический комплекс «Dynapod» (Институт станков и прессов IWU, Кемниц, Германия)

Кинематическая структура типа «ножницы»

Мехатронный модуль «мотор-шпиндель» на электромагнитных опорах Мотор-шпиндель состоит из статора 4, ротора 3, вращающегося в двух электромагнитных радиальных 2 и 10 и осевых 8 опорах. Для сохранения постоянным положения оси ротора его контролируют радиальными 1, 11, 5 и 9 и осевыми 6 и 7 датчиками (Егоров О. Д. , Подураев Ю. В. Конструирование мехатронных модулей. с. 77)

Традиционный привод линейных перемещений

Линейные двигатели (Егоров О. Д. , Подураев Ю. В. Конструирование мехатронных модулей. с. 101 -106)

Мехатронный модуль линейного типа 1 – ротор линейного двигателя, 2 – статор, 3 – измерительная линейка, 4 – направляющие, 5 – силовой кабель.

Стадии инъекции генетического материала в живые клетки

Прокалывание живой клетки при различных направлениях движения рабочего органа

Структура системы инъекции в живые клетки Три основных информационных канала в рассматриваемой системе: § Компьютер – микроскоп (обработка изображения) § Компьютер – ведомый робот (телеуправление) § Компьютер – ведущий робот (силовая обратная связь)

Общий вид микроробототехнической системы

Компактность и миниатюризация в мехатронных модулей Миниатюрный мехатронный модуль фирмы Maxon: Мощность 0. 5 Вт, диаметр корпуса 8 мм, длина модуля 16 мм, вес 4 г. , диаметр вала двигателя 0. 8 мм

Цикловое управление Исходное положение Целевое положение Pm P 0 Движения всех звеньев робота происходит из начального в целевое положение, которое задается механическими упорами или электрическими конечными выключателями

Позиционное управление Промежуточные точки Исходное положение P 0 P 1 P 2 P 3 Целевое положение Pm Движения всех звеньев робота происходит из начального в целевое положение через промежуточные точки, заданные в программе. Траектория рабочего органа между точками не задается.
 загрузка технологического оборудования (REIS Robot)")
Позиционное управление: роботизированная точечная сварка (COMAU Robot) загрузка технологического оборудования (REIS Robot)

Контурное управление P 0 P 1 P 2 P 3 Pm - программная траектория V(t) – контурная скорость V P 0 P 1 P 2 P 3 Pm Программа движения задает траекторию рабочего органа в декартовом пространстве и во времени
 лазерная резка (REIS Robot)")
Контурное управление : роботизированная окраска (FANUC Robot) лазерная резка (REIS Robot)
 1 – манипулятор PUMA-560, 2")
Адаптивное управление: Робототехнологический комплекс (МГТУ Станкин - Будапештский ТУ) 1 – манипулятор PUMA-560, 2 – устройство управления Сфера-36, 3 – рабочий орган, 4 – компьютер верхнего уровня управления, 5 – информационное устройство, 6 – стол с заготовкой
")
Адаптивное управление (на основе информации о возмущающем воздействии)

Конструкция силомоментного датчика С. А. Воротников Информационные устройства робототехнических систем, Изд-во МГТУ им. Баумана, 2005

РАЗРАБОТКА ЭКСПЕРИМЕНТАЛЬНОГО ОБРАЗЦА МОБИЛЬНОГО РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА Видео!
")
Основные части нервной клетки (нейрона)

Структура нервной системы

Интеллектуальное управление на основе искусственных нейронных сетей. Математическая модель нейрона In 1 In 2 w 1 Out Y f In n wn w 1, w 2, …, wn – весовые коэффициенты Y=Σ wi • Ini - взвешенная сумма входных сигналов f- нелинейная функция активации Out = f (Y) = 1/ [1+exp(-Y)]

Структура нейронной сети ANNs are taught by system developer at concrete cases. While teaching the developer gives information on inputs and corresponding desired outputs. Special tuning programme automatically selects weight coefficients the way to get correspondence. The learning is repeated at all known examples accumulating existing experience. This way the tuned net is ready for solution of new tasks for other combinations of inputs. The main specifics of ANN method is in the fact that developer doesn't need to programme clear task solution algorithm. He only needs to dive the input and output data for teaching.

Обучение нейронной сети

Классификация мехатронных модулей Интеллектуальные мехатронные модули Мехатронные модули движения Модули движения Управляющие и электронные устройства Двигатель Механическое устройство Информационное устройство
")
Модули движения: моторы-редукторы на базе асинхронных двигателей (фирма Dunkermotoren)
")
Мехатронный модуль движения (фирма Maxon)
 1. Электрическая часть (Power Supply, Fieldbus")
Интеллектуальный мехатронный модуль: Milan Drive (www. milan-drive. de) 1. Электрическая часть (Power Supply, Fieldbus connection, I/O-Box, RS 232) 2. Силовой преобразователь (Amplifier, digital position and speed regulators, digital input and output) 3. Контроллер (управляющее устройство) (System settings, Monitoring, Programming) 4. 5. 6. 7. 8. Датчик обратной связи (ВТ) Фланец Выходной вал Двигатель и тормоз Подшипник

Прямая задача о положении многозвенного механизма Постановка задачи: Определить вектор положения концевой точки (рабочего органа) в декартовой системе координат по заданным обобщенным координатам многозвенного механизма

Робот с избыточными степенями подвижности

Пример y P q 1= r q 2 x

Пример

Обратная задача о положении многозвенного механизма Постановка задачи: Определить обобщенные координаты многозвенного механизма по заданному вектору положения концевой точки (рабочего органа)

Пример

Прямая задача о скорости многозвенного механизма Постановка задачи: Определить вектор скорости концевой точки (рабочего органа) по заданным обобщенным скоростям многозвенного механизма

Прямая задача о скорости многозвенного механизма z P V Ω x y
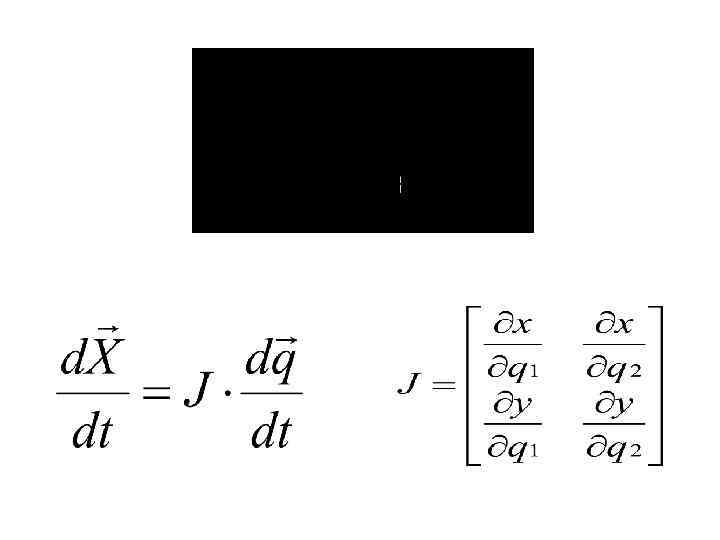

Пример

Погрешность позиционирования z P Δ Δmax A y x Р – фактическое положение полюса рабочего органа, А – программное положение, Δ – погрешность позиционирования в данном эксперименте, Δmax – максимальная (паспортная) величина погрешности позиционирования машины

Погрешность отработки траектории z δ max G L y x L – фактическая траектория полюса рабочего органа, G – программная траектория, δ max – максимальная (паспортная) величина погрешности отработки траектории
")
Определение точности позиционирования многозвенного механизма Постановка задачи: Определить вектор отклонения концевой точки (рабочего органа) по заданным отклонениям обобщенных координат многозвенного механизма

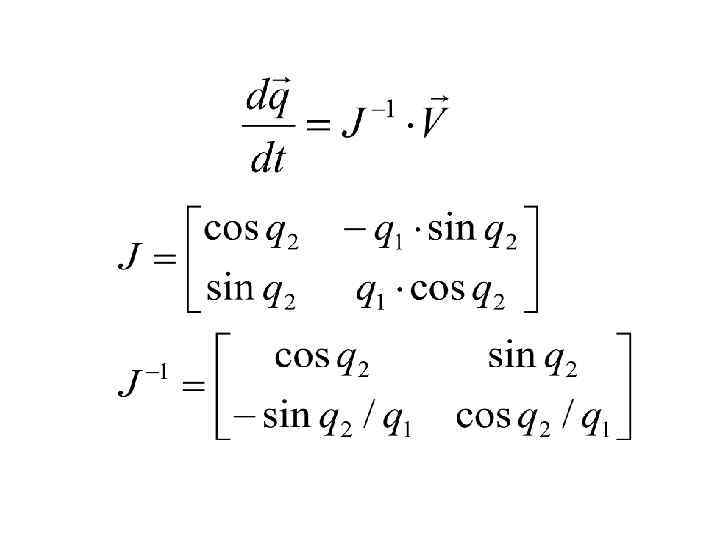
Обратная задача о скорости многозвенного механизма Постановка задачи: Определить обобщенные скорости многозвенного механизма по заданному вектору скорости концевой точки (рабочего органа).

Прямая задача об усилии многозвенного механизма Постановка задачи: Определить вектор усилия, развиваемого концевой точкой (рабочим органом) по заданным обобщенным силам многозвенного механизма

Прямая задача об усилии многозвенного механизма z P F M x y

Обратная задача об усилии многозвенного механизма Постановка задачи: Определить обобщенные силы многозвенного механизма по заданному вектору усилия, развиваемые концевой точкой (рабочим органом).
Студентам - 2.ppt