

СПУТНИКОВЫЕ МЕТОДЫ 2 вариант.ppt
- Количество слайдов: 52
 СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕКЦИЯ ДЛЯ 3 КУРСА НАПРАВЛЕНИЯ Землеустройство и кадастры
СПУТНИКОВЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕКЦИЯ ДЛЯ 3 КУРСА НАПРАВЛЕНИЯ Землеустройство и кадастры
 внесло масштабные перемены в методы геодезии") Историческая справка • Появление искусственных спутников Земли (ИСЗ) внесло масштабные перемены в методы геодезии и позволило значительно повысить точность определения местоположения точек и объектов на поверхности Земли. • Идея использования космических аппаратов для навигации подвижных объектов начала развиваться после запуска в СССР в 1957 году первого ИСЗ. • К первому поколению спутниковых систем позиционирования до 70 -х годов относят системы «Цикада» и «Transit» .
Историческая справка • Появление искусственных спутников Земли (ИСЗ) внесло масштабные перемены в методы геодезии и позволило значительно повысить точность определения местоположения точек и объектов на поверхности Земли. • Идея использования космических аппаратов для навигации подвижных объектов начала развиваться после запуска в СССР в 1957 году первого ИСЗ. • К первому поколению спутниковых систем позиционирования до 70 -х годов относят системы «Цикада» и «Transit» .
 Историческая справка • В 1963 году начались работы по построению первой советской низкоорбитальной навигационной спутниковой системы «Цикада» . В 1967 году на орбиту был выведен первый отечественный навигационный спутник «Космос-192» . Для радионавигационных спутниковых систем первого поколения характерным является применение низкоорбитальных ИСЗ и использование для измерения навигационных параметров объекта сигнала одного, видимого в данный момент спутника
Историческая справка • В 1963 году начались работы по построению первой советской низкоорбитальной навигационной спутниковой системы «Цикада» . В 1967 году на орбиту был выведен первый отечественный навигационный спутник «Космос-192» . Для радионавигационных спутниковых систем первого поколения характерным является применение низкоорбитальных ИСЗ и использование для измерения навигационных параметров объекта сигнала одного, видимого в данный момент спутника
 Историческая справка • В 1964 году в США была создана доплеровская спутниковая радионавигационная система первого поколения «Transit» , предназначенная для навигационного обеспечения пуска с подводных лодок баллистических ракет. В 1967 году эта система была предоставлена для коммерческого использования, число ее гражданских потребителей быстро превысило число военных. Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6 -7 космических аппаратов, который мог находиться в поле видимости в течении примерно 40 минут.
Историческая справка • В 1964 году в США была создана доплеровская спутниковая радионавигационная система первого поколения «Transit» , предназначенная для навигационного обеспечения пуска с подводных лодок баллистических ракет. В 1967 году эта система была предоставлена для коммерческого использования, число ее гражданских потребителей быстро превысило число военных. Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6 -7 космических аппаратов, который мог находиться в поле видимости в течении примерно 40 минут.
 – глобальная система позиционирования (первоначально называлась") ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ GPS (Global Positioning System) – глобальная система позиционирования (первоначально называлась Navstar) находится в ведении Минобороны США. Запуск спутников первого блока осуществлен в 1978 году, эксплуатируется с 1995 года. До недавнего времени система была открыта для гражданского пользования только в режиме пониженной точности, для режима высокой точности требовался санкционированный доступ. В 2000 году это ограничение снято, и сейчас GPS открыта для всех и в режиме высокой точности. ГЛОНАСС – Глобальная навигационная спутниковая система, ее разработки начаты в СССР в 1970 г. В 1982 году выведены на орбиты ее первые спутники, в 1993 году система принята в эксплуатацию Минобороны РФ. В 1996 году система развернута полностью. Повышенная точность доступна поенным, режим стандартной (пониженной) точности – гражданским пользователям. В связи с отсутствием финансирования система пришла в упадок, но в настоящее время ведется активная работа по ее восстановлению. В 1999 году Европейский парламент поддержал решение Европейского космического агентства о создании нового поколения спутниковой системы Galileo, которая будет включать 30 спутников (из них 3 резервных).
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ GPS (Global Positioning System) – глобальная система позиционирования (первоначально называлась Navstar) находится в ведении Минобороны США. Запуск спутников первого блока осуществлен в 1978 году, эксплуатируется с 1995 года. До недавнего времени система была открыта для гражданского пользования только в режиме пониженной точности, для режима высокой точности требовался санкционированный доступ. В 2000 году это ограничение снято, и сейчас GPS открыта для всех и в режиме высокой точности. ГЛОНАСС – Глобальная навигационная спутниковая система, ее разработки начаты в СССР в 1970 г. В 1982 году выведены на орбиты ее первые спутники, в 1993 году система принята в эксплуатацию Минобороны РФ. В 1996 году система развернута полностью. Повышенная точность доступна поенным, режим стандартной (пониженной) точности – гражданским пользователям. В связи с отсутствием финансирования система пришла в упадок, но в настоящее время ведется активная работа по ее восстановлению. В 1999 году Европейский парламент поддержал решение Европейского космического агентства о создании нового поколения спутниковой системы Galileo, которая будет включать 30 спутников (из них 3 резервных).
 ПРЕИМУЩЕСТВА И НЕДОСТАТКИ ПО СРАВНЕНИЮ С «ТРАДИЦИОННЫМИ» МЕТОДАМИ • ИСКЛЮЧЕНИЕ НЕОБХОДИМОСТИ ВЗАИМОВИДИМОСТИ МЕЖДУ ОПРЕДЕЛЯЕМЫМИ ПУНКТАМИ • РАССТОЯНИЯ МЕЖДУ ОПРЕДЕЛЯЕМЫМИ ПУНКТАМИ МОГУТ СОСТАВЛЯТЬ ДЕСЯТКИ КИЛОМЕТРОВ • НАБЛЮДЕНИЯ ВОЗМОЖНЫ В ЛЮБУЮ ПОГОДУ, В ЛЮБОЕ ВРЕМЯ СУТОК • ИЗМЕРЕНИЯ И ОБРАБОТКА РЕЗУЛЬТАТОВ ПРАКТИЧЕСКИ ПОЛНОСТЬЮ АВТОМАТИЗИРОВАНЫ • ВОЗМОЖНОСТЬ ПОЛУЧЕНИЯ КООРДИНАТ ОПРЕДЕЛЯЕМЫХ ПУНКТОВ (ПУНКТОВ ГГС, ОМС, ПОВОРОТНЫХ ТОЧЕК ГРАНИЦ ЗЕМЕЛЬНЫХ УЧАСТКОВ, ХАРАКТЕРНЫХ ТОЧЕК ОБЪЕКТОВ НЕДВИЖИМОСТИ И Т. Д. ) В РЕАЛЬНОМ ВРЕМЕНИ
ПРЕИМУЩЕСТВА И НЕДОСТАТКИ ПО СРАВНЕНИЮ С «ТРАДИЦИОННЫМИ» МЕТОДАМИ • ИСКЛЮЧЕНИЕ НЕОБХОДИМОСТИ ВЗАИМОВИДИМОСТИ МЕЖДУ ОПРЕДЕЛЯЕМЫМИ ПУНКТАМИ • РАССТОЯНИЯ МЕЖДУ ОПРЕДЕЛЯЕМЫМИ ПУНКТАМИ МОГУТ СОСТАВЛЯТЬ ДЕСЯТКИ КИЛОМЕТРОВ • НАБЛЮДЕНИЯ ВОЗМОЖНЫ В ЛЮБУЮ ПОГОДУ, В ЛЮБОЕ ВРЕМЯ СУТОК • ИЗМЕРЕНИЯ И ОБРАБОТКА РЕЗУЛЬТАТОВ ПРАКТИЧЕСКИ ПОЛНОСТЬЮ АВТОМАТИЗИРОВАНЫ • ВОЗМОЖНОСТЬ ПОЛУЧЕНИЯ КООРДИНАТ ОПРЕДЕЛЯЕМЫХ ПУНКТОВ (ПУНКТОВ ГГС, ОМС, ПОВОРОТНЫХ ТОЧЕК ГРАНИЦ ЗЕМЕЛЬНЫХ УЧАСТКОВ, ХАРАКТЕРНЫХ ТОЧЕК ОБЪЕКТОВ НЕДВИЖИМОСТИ И Т. Д. ) В РЕАЛЬНОМ ВРЕМЕНИ
 ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ
 ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ
 • В GPS ИСЗ размещены на шести орбитальных плоскостях по четыре спутника в каждой, высота орбиты 20145 км, восходящие узлы орбит в GPS расположены примерно по экватору и отстоят друг от друга по долготе на 60° на восток. • В ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите 24 ИСЗ, тип орбиты круговой, высота орбиты 19100 км, наклон орбиты 64, 8°, период обращения – примерно 12 часов. • 30 спутников Galileo, расположенных на высоте 23200 км и вращаются в трех орбитальных плоскостях, наклоненных на 56° к плоскости экватора. • Т. о. , с учетом спутников GPS и ГЛОНАСС в распоряжении пользователей будет 80 космических аппаратов, покрывающих весь земной шар.
• В GPS ИСЗ размещены на шести орбитальных плоскостях по четыре спутника в каждой, высота орбиты 20145 км, восходящие узлы орбит в GPS расположены примерно по экватору и отстоят друг от друга по долготе на 60° на восток. • В ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите 24 ИСЗ, тип орбиты круговой, высота орбиты 19100 км, наклон орбиты 64, 8°, период обращения – примерно 12 часов. • 30 спутников Galileo, расположенных на высоте 23200 км и вращаются в трех орбитальных плоскостях, наклоненных на 56° к плоскости экватора. • Т. о. , с учетом спутников GPS и ГЛОНАСС в распоряжении пользователей будет 80 космических аппаратов, покрывающих весь земной шар.
 Китай стал третьей страной после США и России, внедрившей собственную навигационную систему. Китай начал создание этой системы ещё в 1985 году, проект назван в честь семизвёздного созвездия, известного в других странах как Большая Медведица. Китай запустил первый спутник Beidou в 2000 году, и предварительная версия системы была использована в контроле перемещений транспорта, прогнозирования погоды и стихийных бедствий, работа на экспериментальной основе начата с 2003 года. В настоящее время насчитывает более 130 тысяч пользователей системы среди военных и гражданских лиц, в том числе в областях финансов, энергетики, рыболовства и противопожарных секторов. Система послужила важным средством для координации действий во время работы по оказанию помощи после разрушительного 8, 0 -балльного землетрясения в мае 2008 год в округе Вэньчуань провинции Сычуань, сообщает Xinhua. Ран Ченгги (Ran Chengqi), пресс-секретарь навигационной системы, сказал, что система стремится занять от 70 до 80 процентов внутреннего рынка к 2020 году, на котором в настоящее время доминирует GPS. Однако через два дня после того, как в Китае была запущена собственная сеть GNSS - Beidou, Центральная военная комиссия Китая заявила о необходимости повышения её безопасности и уменьшения внешнего вмешательства. Исследователи должны усилить меры безопасности системы Beidou и увеличить его пропускную способность, чтобы предотвратить возможное вмешательство других государств. При этом по данным китайских СМИ, Фан Чанглонг (Fan Changlong), вице-председатель Центральной военной комиссии Китая, также подчеркнул, что внедрение навигационной системы сняло зависимость Китая от иностранных навигационных систем и имеет большое значение для обеспечения национальной безопасности и экономического развития страны.
Китай стал третьей страной после США и России, внедрившей собственную навигационную систему. Китай начал создание этой системы ещё в 1985 году, проект назван в честь семизвёздного созвездия, известного в других странах как Большая Медведица. Китай запустил первый спутник Beidou в 2000 году, и предварительная версия системы была использована в контроле перемещений транспорта, прогнозирования погоды и стихийных бедствий, работа на экспериментальной основе начата с 2003 года. В настоящее время насчитывает более 130 тысяч пользователей системы среди военных и гражданских лиц, в том числе в областях финансов, энергетики, рыболовства и противопожарных секторов. Система послужила важным средством для координации действий во время работы по оказанию помощи после разрушительного 8, 0 -балльного землетрясения в мае 2008 год в округе Вэньчуань провинции Сычуань, сообщает Xinhua. Ран Ченгги (Ran Chengqi), пресс-секретарь навигационной системы, сказал, что система стремится занять от 70 до 80 процентов внутреннего рынка к 2020 году, на котором в настоящее время доминирует GPS. Однако через два дня после того, как в Китае была запущена собственная сеть GNSS - Beidou, Центральная военная комиссия Китая заявила о необходимости повышения её безопасности и уменьшения внешнего вмешательства. Исследователи должны усилить меры безопасности системы Beidou и увеличить его пропускную способность, чтобы предотвратить возможное вмешательство других государств. При этом по данным китайских СМИ, Фан Чанглонг (Fan Changlong), вице-председатель Центральной военной комиссии Китая, также подчеркнул, что внедрение навигационной системы сняло зависимость Китая от иностранных навигационных систем и имеет большое значение для обеспечения национальной безопасности и экономического развития страны.
 ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Космический сектор включает в себя созвездие навигационных искусственных спутников Земли (НИСЗ), вращающихся вокруг Земли на определенных эллиптических орбитах, размеры которых определяются размером их больших полуосей а (примерно равно 26560 км) и эксцентриситета е (примерно равно 0, 001). Положение плоскости орбиты относительно экваториальной плоскости характеризуют долгота восходящего узла Ω, аргумент перигея ω и угол i наклона плоскости орбиты к плоскости экватора (для системы GPS: ω=80°, i=55°). Положение НИСЗ на орбите описывает радиус-вектор ρ=P/(1+e·cosv), где P=a(1 -e 2); v – истинная аномалия (выражается в градусной мере).
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Космический сектор включает в себя созвездие навигационных искусственных спутников Земли (НИСЗ), вращающихся вокруг Земли на определенных эллиптических орбитах, размеры которых определяются размером их больших полуосей а (примерно равно 26560 км) и эксцентриситета е (примерно равно 0, 001). Положение плоскости орбиты относительно экваториальной плоскости характеризуют долгота восходящего узла Ω, аргумент перигея ω и угол i наклона плоскости орбиты к плоскости экватора (для системы GPS: ω=80°, i=55°). Положение НИСЗ на орбите описывает радиус-вектор ρ=P/(1+e·cosv), где P=a(1 -e 2); v – истинная аномалия (выражается в градусной мере).
 имеют следующий вид:") ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Составляющие радиуса-вектора (его пространственные инерциальные геоцентрические координаты) имеют следующий вид: где U=ω+u – аргумент широты. При невозмущенном движении НИСЗ параметры Ω, ω, i, ρ и е – постоянны и не меняются при движении спутника по орбите. При этом истинная аномалия характеризует положение спутника на орбите в определенный момент времени, называемый «эпохой» . Пространственное положение НИСЗ характеризуют его «бортовые эфемериды» , включающие в себя пространственные координаты НИСЗ на определенный момент времени tk (на определенную эпоху).
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Составляющие радиуса-вектора (его пространственные инерциальные геоцентрические координаты) имеют следующий вид: где U=ω+u – аргумент широты. При невозмущенном движении НИСЗ параметры Ω, ω, i, ρ и е – постоянны и не меняются при движении спутника по орбите. При этом истинная аномалия характеризует положение спутника на орбите в определенный момент времени, называемый «эпохой» . Пространственное положение НИСЗ характеризуют его «бортовые эфемериды» , включающие в себя пространственные координаты НИСЗ на определенный момент времени tk (на определенную эпоху).
 ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Сектор управления и контроля – комплекс наземных средств, обеспечивающих непрерывные наблюдения и контроль над работой всей системы. Одна из составляющих этого сектора – равномерно расположенная на поверхности Земли космическая геодезическая сеть (КГС). Сектор управления и контроля состоит из станции слежения, службы точного времени, главной станции с вычислительным центром и станции загрузки информации на спутники. По результатам соответствующих измерений бортовые эфемериды загружаются на ИСЗ раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения ИСЗ и т. д. ) на точность абсолютного положения определяемых пунктов не превышает для ГЛОНАСС – 9, 2 м, и системы GPS – 1 м.
ГЛОБАЛЬНЫЕ НАВИГАЦИОННЫЕ СПУТНИКОВЫЕ СИСТЕМЫ Сектор управления и контроля – комплекс наземных средств, обеспечивающих непрерывные наблюдения и контроль над работой всей системы. Одна из составляющих этого сектора – равномерно расположенная на поверхности Земли космическая геодезическая сеть (КГС). Сектор управления и контроля состоит из станции слежения, службы точного времени, главной станции с вычислительным центром и станции загрузки информации на спутники. По результатам соответствующих измерений бортовые эфемериды загружаются на ИСЗ раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения ИСЗ и т. д. ) на точность абсолютного положения определяемых пунктов не превышает для ГЛОНАСС – 9, 2 м, и системы GPS – 1 м.
 ИСЗ движется по орбите в некоторой шкале времени. В ГНСС используют следующее время: всемирное (гринвичское среднее солнечное); всемирное координированное; поясное; местное декретное и летнее. Всемирное время UT содержит год, месяц, число, час, минуту и секунду. При этом первые три величины (год, месяц и число) отсчитывают по Григорианскому календарю, час, минуту и секунду – по местному среднему времени на гринвичском меридиане. Всемирное время измеряют часовым углом среднего Солнца относительно гринвичского меридиана, увеличенного на 12 часов. Всемирное координированное время UTC измеряют по атомным часам и передают по радиовещательным сетям, используют в повседневной жизни. Поясное время ZT также содержит год, месяц и число. Часы, минуты и секунды в поясном времени соответствуют местному среднему времени основного (центрального) географического меридиана определенного часового пояса, значение которого вычисляют по формуле: ZT = UTC + Δn, где Δn – номер часового пояса. Поясное время введено в России с 1919 года. При этом поверхность Земли была разделена на 24 часовых пояса, центральные меридианы которых отличаются по долготе на 15° (1 час). Например, для Москвы Δn=2. Местное декретное время отличается от поясного времени на декретную добавку Δtдкр, устанавливаемую для каждого региона законодательным порядком. В России в качестве местного декретного времени действует летнее время tл, которое действует ежегодно с 2 часов ночи последнего воскресенья марта до 3 часов ночи последнего воскресенья сентября, когда вводят зимнее времяtзим = ZT + 1 час.
ИСЗ движется по орбите в некоторой шкале времени. В ГНСС используют следующее время: всемирное (гринвичское среднее солнечное); всемирное координированное; поясное; местное декретное и летнее. Всемирное время UT содержит год, месяц, число, час, минуту и секунду. При этом первые три величины (год, месяц и число) отсчитывают по Григорианскому календарю, час, минуту и секунду – по местному среднему времени на гринвичском меридиане. Всемирное время измеряют часовым углом среднего Солнца относительно гринвичского меридиана, увеличенного на 12 часов. Всемирное координированное время UTC измеряют по атомным часам и передают по радиовещательным сетям, используют в повседневной жизни. Поясное время ZT также содержит год, месяц и число. Часы, минуты и секунды в поясном времени соответствуют местному среднему времени основного (центрального) географического меридиана определенного часового пояса, значение которого вычисляют по формуле: ZT = UTC + Δn, где Δn – номер часового пояса. Поясное время введено в России с 1919 года. При этом поверхность Земли была разделена на 24 часовых пояса, центральные меридианы которых отличаются по долготе на 15° (1 час). Например, для Москвы Δn=2. Местное декретное время отличается от поясного времени на декретную добавку Δtдкр, устанавливаемую для каждого региона законодательным порядком. В России в качестве местного декретного времени действует летнее время tл, которое действует ежегодно с 2 часов ночи последнего воскресенья марта до 3 часов ночи последнего воскресенья сентября, когда вводят зимнее времяtзим = ZT + 1 час.
 между ИСЗ и фазовым") Принцип определения местоположения с помощью ГНСС предусматривает измерение расстояний (дальностей) между ИСЗ и фазовым центром антенны приемника спутниковых сигналов, установленного на определяемой точке местности. С целью реализации данного принципа каждый ИСЗ излучает радиосигналы, структура которых для системы GPS показана на рис. Рис. Структура радиосигнала системы GPS В радиолинии частотного диапазона L 1 спутники системы GPS одновременно излучают кодовые последовательности стандартной (P-код) и высокой (C/A-код) точности. Также излучается несущий электромагнитный сигнал частотой L 2. При необходимости C/A-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код.
Принцип определения местоположения с помощью ГНСС предусматривает измерение расстояний (дальностей) между ИСЗ и фазовым центром антенны приемника спутниковых сигналов, установленного на определяемой точке местности. С целью реализации данного принципа каждый ИСЗ излучает радиосигналы, структура которых для системы GPS показана на рис. Рис. Структура радиосигнала системы GPS В радиолинии частотного диапазона L 1 спутники системы GPS одновременно излучают кодовые последовательности стандартной (P-код) и высокой (C/A-код) точности. Также излучается несущий электромагнитный сигнал частотой L 2. При необходимости C/A-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код.
 В радиолинии частотного диапазона L 1 спутники системы GPS одновременно излучают кодовые последовательности стандартной (P-код) и высокой (C/A-код) точности. Также излучается несущий электромагнитный сигнал частотой L 2. При необходимости C/A-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код. В ГЛОНАСС каждый спутник работает на собственной частоте. Разделение сигналов частотное. Так же, как и в GPS, несущие сигналы обозначают как L 1 и L 2, а P-коду соответствует ВТ-код (код высокой точности) и СТ-код (код стандартной точности). Одновременно с измерительными сигналами с ИСЗ передается хранящаяся на нем, т. н. , оперативная и неоперативная информация, сформированная в виде кадра навигационного сообщения. Оперативная информация содержит: эфемериды ИСЗ (три пространственных прямоугольных координаты X, Y, Z, три составляющих скорости ИСЗ и три составляющих ускорения); метку времени; сдвиг шкалы времени ИСЗ относительно шкалы времени всей системы и другие сведения. Неоперативную информацию образует альманах системы, содержащий параметры орбит всех спутников системы и другие сведения. Полный кадр систем ГЛОНАСС и GPS передается в течении 10 -12 минут.
В радиолинии частотного диапазона L 1 спутники системы GPS одновременно излучают кодовые последовательности стандартной (P-код) и высокой (C/A-код) точности. Также излучается несущий электромагнитный сигнал частотой L 2. При необходимости C/A-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код. В ГЛОНАСС каждый спутник работает на собственной частоте. Разделение сигналов частотное. Так же, как и в GPS, несущие сигналы обозначают как L 1 и L 2, а P-коду соответствует ВТ-код (код высокой точности) и СТ-код (код стандартной точности). Одновременно с измерительными сигналами с ИСЗ передается хранящаяся на нем, т. н. , оперативная и неоперативная информация, сформированная в виде кадра навигационного сообщения. Оперативная информация содержит: эфемериды ИСЗ (три пространственных прямоугольных координаты X, Y, Z, три составляющих скорости ИСЗ и три составляющих ускорения); метку времени; сдвиг шкалы времени ИСЗ относительно шкалы времени всей системы и другие сведения. Неоперативную информацию образует альманах системы, содержащий параметры орбит всех спутников системы и другие сведения. Полный кадр систем ГЛОНАСС и GPS передается в течении 10 -12 минут.
 включает в себя спутниковые приемники, число которых не ограничено, а также") Сектор пользователя (потребителя) включает в себя спутниковые приемники, число которых не ограничено, а также комплекс камеральной обработки измерений. Обработку сигналов выполняют с целью выработки необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т. д. ). Упрощенная структурная схема приемника спутниковых сигналов показана на рис. Приемное устройство выполняет функции супергетеродинного приемника, а также первичную обработку сигналов. Соответствующие сигналы поступают в блок поиска и измерения. После завершения поиска происходит захват сигнала, который поступает в вычислительный блок. По указаниям наблюдателя результаты соответствующей обработки, как правило, могут быть отражены на дисплее.
Сектор пользователя (потребителя) включает в себя спутниковые приемники, число которых не ограничено, а также комплекс камеральной обработки измерений. Обработку сигналов выполняют с целью выработки необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т. д. ). Упрощенная структурная схема приемника спутниковых сигналов показана на рис. Приемное устройство выполняет функции супергетеродинного приемника, а также первичную обработку сигналов. Соответствующие сигналы поступают в блок поиска и измерения. После завершения поиска происходит захват сигнала, который поступает в вычислительный блок. По указаниям наблюдателя результаты соответствующей обработки, как правило, могут быть отражены на дисплее.
 Рис. Структурная схема приемника спутниковых сигналов
Рис. Структурная схема приемника спутниковых сигналов
 Выделяют три модификации приемников. Приемники первого класса предназначены для быстрых навигационных определений координат, такие приемники удобно использовать при рекогносцировке, выносе в натуру и съемке объектов с небольшой точностью. Приемники второго класса предназначены для определения положения движущихся объектов. Приемники третьего класса являются приемниками геодезического назначения, в них имеется многоканальный блок, осуществляющий слежение одновременно за сигналами нескольких ИСЗ (до 12 и более). Внутренняя память приемника до 100 Мб и более. Приемники оснащены портами для интеграции с другой аппаратурой, в том числе ПЭВМ. Значительный практический интерес представляют собой совмещенные GPS/ГЛОНАСС приемники. В общем случае приемники геодезического назначения выполняют следующие функции: генерация местной шкалы времени (местных эталонных колебаний); поиск, усиление и разделение сигналов, принадлежащих различным ИСЗ; фильтрация сигналов; выделение из сигналов меток времени и псевдослучайных последовательностей; слежение за частотой, фазой, кодовыми сигналами, измерение псевдодальностей до каждого ИСЗ; прием установочных параметров и маркеров, фиксирующих внешние события; выполнение различных оперативных расчетов; выдача в форме индикации на дисплее контроллера соответствующей информации об установочных указаниях и параметрах, результаты измерений, например в форме геодезических координат, о наличии и состоянии участвующих в радиосеансе ИСЗ и др. ; прием поправок в псевдодальности от внешнего передающего устройства; передача результатов спутниковых наблюдений на другие радиоприемные устройства, в том числе телефон сотовой связи; хранение принятой информации.
Выделяют три модификации приемников. Приемники первого класса предназначены для быстрых навигационных определений координат, такие приемники удобно использовать при рекогносцировке, выносе в натуру и съемке объектов с небольшой точностью. Приемники второго класса предназначены для определения положения движущихся объектов. Приемники третьего класса являются приемниками геодезического назначения, в них имеется многоканальный блок, осуществляющий слежение одновременно за сигналами нескольких ИСЗ (до 12 и более). Внутренняя память приемника до 100 Мб и более. Приемники оснащены портами для интеграции с другой аппаратурой, в том числе ПЭВМ. Значительный практический интерес представляют собой совмещенные GPS/ГЛОНАСС приемники. В общем случае приемники геодезического назначения выполняют следующие функции: генерация местной шкалы времени (местных эталонных колебаний); поиск, усиление и разделение сигналов, принадлежащих различным ИСЗ; фильтрация сигналов; выделение из сигналов меток времени и псевдослучайных последовательностей; слежение за частотой, фазой, кодовыми сигналами, измерение псевдодальностей до каждого ИСЗ; прием установочных параметров и маркеров, фиксирующих внешние события; выполнение различных оперативных расчетов; выдача в форме индикации на дисплее контроллера соответствующей информации об установочных указаниях и параметрах, результаты измерений, например в форме геодезических координат, о наличии и состоянии участвующих в радиосеансе ИСЗ и др. ; прием поправок в псевдодальности от внешнего передающего устройства; передача результатов спутниковых наблюдений на другие радиоприемные устройства, в том числе телефон сотовой связи; хранение принятой информации.
 На базе GPS-приёмников создаются как самостоятельные устройства — GPS-навигаторы, GPSтрекеры, имеющие собственный процессор для необходимых расчётов и (в основном, у навигаторов) дисплей для отображения информации, и GPSприставки к КПК и ноутбукам, которые бывают беспроводные (Blue. Tooth) и проводные (USB, RS-232). Последние также жаргонно называют GPS-мышками изза внешнего сходства с компьютерными мышами. Помимо этих устройств, для GPS-навигации используются онбордеры (встроенные автомобильные компьютеры).
На базе GPS-приёмников создаются как самостоятельные устройства — GPS-навигаторы, GPSтрекеры, имеющие собственный процессор для необходимых расчётов и (в основном, у навигаторов) дисплей для отображения информации, и GPSприставки к КПК и ноутбукам, которые бывают беспроводные (Blue. Tooth) и проводные (USB, RS-232). Последние также жаргонно называют GPS-мышками изза внешнего сходства с компьютерными мышами. Помимо этих устройств, для GPS-навигации используются онбордеры (встроенные автомобильные компьютеры).
 • Оборудование условно делится на пользовательское и профессиональное. Профессиональное отличается качеством изготовления компонент (особенно антенн) и ПО, поддерживаемыми режимами работы (например RTK, binary data output), рабочими частотами (L 1+L 2), алгоритмами подавления многолучевости, солнечной активности (влияние ионосферы), поддерживаемыми системами навигации (например GPS — ГЛОНАСС приёмники) и, разумеется, ценой. Приемники бывают одноканальными и многоканальными.
• Оборудование условно делится на пользовательское и профессиональное. Профессиональное отличается качеством изготовления компонент (особенно антенн) и ПО, поддерживаемыми режимами работы (например RTK, binary data output), рабочими частотами (L 1+L 2), алгоритмами подавления многолучевости, солнечной активности (влияние ионосферы), поддерживаемыми системами навигации (например GPS — ГЛОНАСС приёмники) и, разумеется, ценой. Приемники бывают одноканальными и многоканальными.
 • Одноканальным GPS приёмникам приходиться осуществлять последовательно захват каждого GPS спутника. По этому каналу осуществляется как слежение за спутниками, так и передача технической информации о состоянии спутника и системы в целом. • Многоканальные GPS приёмники используют несколько каналов для слежения за несколькими спутниками одновременно. Многоканальные GPS приёмники работают более эффективно, чем одноканальные приёмники. В идеальных условиях, со стационарно расположенным C/A кодовым приёмником, когда нет никаких препятствий закрывающих видимость спутников, многолучёвого переотражения или других факторов снижающих точность, разница практически будет незаметна. Однако в реальных условиях, когда приёмник передвигается или сигнал от спутников может прерываться, приёмники с большим числом каналов будут работать лучше. Вам необходимо иметь, по крайней мере, 4 -х канальный GPS приёмник для выполнения высокоточных работ с использованием фазовых измерений. Это связанно с тем, что фазовому приёмнику требуется один канал на каждый спутник для выполнения измерений.
• Одноканальным GPS приёмникам приходиться осуществлять последовательно захват каждого GPS спутника. По этому каналу осуществляется как слежение за спутниками, так и передача технической информации о состоянии спутника и системы в целом. • Многоканальные GPS приёмники используют несколько каналов для слежения за несколькими спутниками одновременно. Многоканальные GPS приёмники работают более эффективно, чем одноканальные приёмники. В идеальных условиях, со стационарно расположенным C/A кодовым приёмником, когда нет никаких препятствий закрывающих видимость спутников, многолучёвого переотражения или других факторов снижающих точность, разница практически будет незаметна. Однако в реальных условиях, когда приёмник передвигается или сигнал от спутников может прерываться, приёмники с большим числом каналов будут работать лучше. Вам необходимо иметь, по крайней мере, 4 -х канальный GPS приёмник для выполнения высокоточных работ с использованием фазовых измерений. Это связанно с тем, что фазовому приёмнику требуется один канал на каждый спутник для выполнения измерений.
 Конструктивно приемники, как правило, выделены в виде отдельных или совмещенных блоков, которые содержат антенное устройство, контроллер (мини-ЭВМ с клавиатурой) и аккумуляторы. Часто приемники имеют встроенный радиомодем, с помощью которого в реальном времени можно передать или принять по каналам связи необходимую информацию. Выбор конкретного вида приемника для проведения земельнокадастровых геодезических работ, прежде всего, зависит от необходимой точности определения положения объектов.
Конструктивно приемники, как правило, выделены в виде отдельных или совмещенных блоков, которые содержат антенное устройство, контроллер (мини-ЭВМ с клавиатурой) и аккумуляторы. Часто приемники имеют встроенный радиомодем, с помощью которого в реальном времени можно передать или принять по каналам связи необходимую информацию. Выбор конкретного вида приемника для проведения земельнокадастровых геодезических работ, прежде всего, зависит от необходимой точности определения положения объектов.
 Принципы определения местоположения пунктов из спутниковых определений Для определения местоположения на земной поверхности измеряют расстояние между наземным пунктом и спутником и скорость изменения этого расстояния при прохождении спутника. Расстояния рассчитывают исходя из времени, которое затрачивает электромагнитный сигнал на прохождение пути от спутника до приемника при условии, что скорость распространения сигнала известна. Скорость изменения расстояния от спутника до приемника определяется по частоте наблюдаемого доплеровского сдвига частоты изменение частоты сигнала, поступающего со спутника. Вводятся поправки за атмосферную задержку сигнала и рефракцию. Основной принцип спутниковых определений – использование трилатерации, т. е. измерений расстояний до спутников, являющихся точками отсчета для вычисления координат на Земле.
Принципы определения местоположения пунктов из спутниковых определений Для определения местоположения на земной поверхности измеряют расстояние между наземным пунктом и спутником и скорость изменения этого расстояния при прохождении спутника. Расстояния рассчитывают исходя из времени, которое затрачивает электромагнитный сигнал на прохождение пути от спутника до приемника при условии, что скорость распространения сигнала известна. Скорость изменения расстояния от спутника до приемника определяется по частоте наблюдаемого доплеровского сдвига частоты изменение частоты сигнала, поступающего со спутника. Вводятся поправки за атмосферную задержку сигнала и рефракцию. Основной принцип спутниковых определений – использование трилатерации, т. е. измерений расстояний до спутников, являющихся точками отсчета для вычисления координат на Земле.
 Определение координат спутниковым измерением
Определение координат спутниковым измерением
 Если измерять расстояние до одного спутника с известными координатами, местоположение определяемой точки должно быть на воображаемой сфере с центром на этом спутнике и радиусом R, равным измеряемому расстоянию S 1 (рис. а) Когда одновременно измеряется расстояние S 2 до второго спутника, то область поиска сократится, т. к. местоположение определяемой точки будет находится на линии пересечения двух сфер с радиусами S 1 и S 2, т. е. на окружности (рис. б). В случае измерения расстояния S 3 до третьего спутника, возможное местоположение определяется двумя точками пересечения окружности со сферой радиуса S 3 (рис. в).
Если измерять расстояние до одного спутника с известными координатами, местоположение определяемой точки должно быть на воображаемой сфере с центром на этом спутнике и радиусом R, равным измеряемому расстоянию S 1 (рис. а) Когда одновременно измеряется расстояние S 2 до второго спутника, то область поиска сократится, т. к. местоположение определяемой точки будет находится на линии пересечения двух сфер с радиусами S 1 и S 2, т. е. на окружности (рис. б). В случае измерения расстояния S 3 до третьего спутника, возможное местоположение определяется двумя точками пересечения окружности со сферой радиуса S 3 (рис. в).
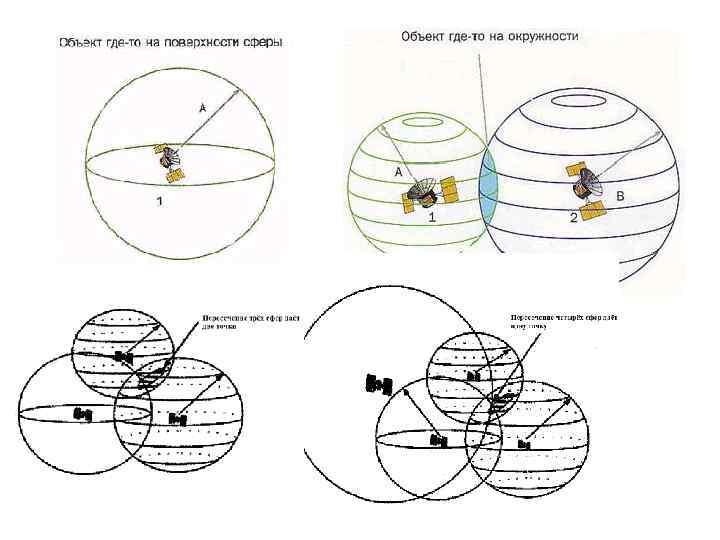
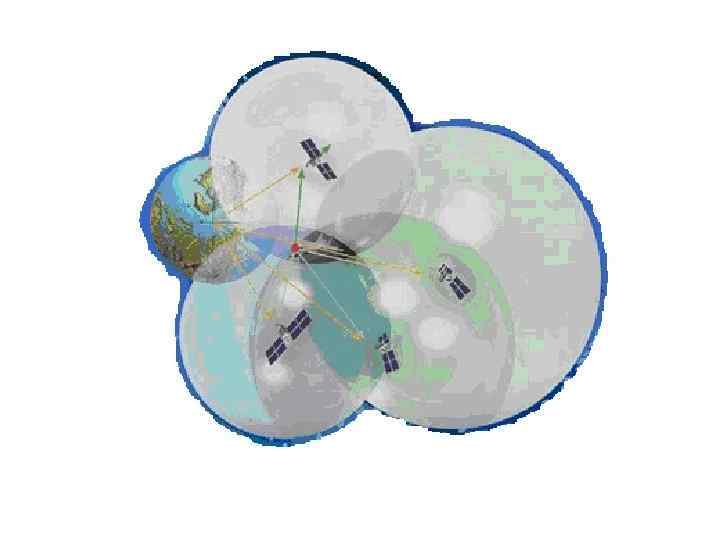
 Для того чтобы определить истинное положение из этих двух точек можно измерить расстояние S 4 до четвертого спутника. Различные методы наблюдений позволяют определять абсолютное и относительное положения объектов на земной поверхности. При определении абсолютного положения используется не менее трех спутников. Чтобы компенсировать разницу в точности определения времени по часам, установленным на борту спутников и на наземной станции, обычно требуется четвертый спутник. Определение относительного положения пункта на земной поверхности требует одновременного наблюдения с четырех и более спутников с двух (или более) наземных станций. Для определения координат точек на земной поверхности в геоцентрической системе необходимо знать элементы орбит спутников в этой же системе, т. к. любые погрешности могут быть уменьшены путем осреднения наблюдаемых величин за несколько дней, недель или месяцев. Часть систематических погрешностей в расчетах элементов орбиты примерно в одинаковой степени вносит искажения при определении всех точек, и поэтому при определении их взаимного положения компенсируется. Вследствие этого относительные положения точек на земной поверхности обычно определяется с большой точностью.
Для того чтобы определить истинное положение из этих двух точек можно измерить расстояние S 4 до четвертого спутника. Различные методы наблюдений позволяют определять абсолютное и относительное положения объектов на земной поверхности. При определении абсолютного положения используется не менее трех спутников. Чтобы компенсировать разницу в точности определения времени по часам, установленным на борту спутников и на наземной станции, обычно требуется четвертый спутник. Определение относительного положения пункта на земной поверхности требует одновременного наблюдения с четырех и более спутников с двух (или более) наземных станций. Для определения координат точек на земной поверхности в геоцентрической системе необходимо знать элементы орбит спутников в этой же системе, т. к. любые погрешности могут быть уменьшены путем осреднения наблюдаемых величин за несколько дней, недель или месяцев. Часть систематических погрешностей в расчетах элементов орбиты примерно в одинаковой степени вносит искажения при определении всех точек, и поэтому при определении их взаимного положения компенсируется. Вследствие этого относительные положения точек на земной поверхности обычно определяется с большой точностью.
 В зависимости от числа одновременно работающих принимающих станций и одновременно наблюдаемых спутников можно получать определенные различия между принимаемым и передаваемым сигналами; это позволяет исключить влияние неизвестных факторов. В спутниковых методах определения местоположения измерение расстояний до спутников осуществляется по измерениям времени прохождения радиосигнала от космического аппарата до приемника. При этом передающее устройство размещено на спутнике, а приемник – на определяемой точке. Радиосигнал проходит измеряемое расстояние S от спутника (передатчика) до приемника на время x. Время излучения и время приема данного сигнала точно определяют синхронизированными часами, расположенными на спутнике и на определяемой точки. При этом измеряемое расстояние определяют по формуле: Т. к. скорость υ радиоволны составляет около 300000 км/с, то для обеспечения геодезической точности измерений необходимо измерять время с точностью 10 -10 -10 -12 с. Главной трудностью при измерении времени распространения радиосигнала является точное выделение момента времени, в который сигнал передан со спутника.
В зависимости от числа одновременно работающих принимающих станций и одновременно наблюдаемых спутников можно получать определенные различия между принимаемым и передаваемым сигналами; это позволяет исключить влияние неизвестных факторов. В спутниковых методах определения местоположения измерение расстояний до спутников осуществляется по измерениям времени прохождения радиосигнала от космического аппарата до приемника. При этом передающее устройство размещено на спутнике, а приемник – на определяемой точке. Радиосигнал проходит измеряемое расстояние S от спутника (передатчика) до приемника на время x. Время излучения и время приема данного сигнала точно определяют синхронизированными часами, расположенными на спутнике и на определяемой точки. При этом измеряемое расстояние определяют по формуле: Т. к. скорость υ радиоволны составляет около 300000 км/с, то для обеспечения геодезической точности измерений необходимо измерять время с точностью 10 -10 -10 -12 с. Главной трудностью при измерении времени распространения радиосигнала является точное выделение момента времени, в который сигнал передан со спутника.
 ПОЛЕВЫЕ ИЗМЕРЕНИЯ
ПОЛЕВЫЕ ИЗМЕРЕНИЯ
 АППАРАТУРА ПОЛЬЗОВАТЕЛЯ
АППАРАТУРА ПОЛЬЗОВАТЕЛЯ
 ТЕХНОЛОГИЧЕСКАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ 1. Планирование спутниковых наблюдений Цель планирования – прогноз геометрических и иных параметров спутникового созвездия на момент проведения работ для определения моментов наблюдений и временных интервалов, в которых параметры наблюдений соответствуют установленным требованиям: Угол отсечки – 15 градусов; Число одновременно наблюдаемых на пункте ИСЗ – 5; Наблюдения планируют для каждого пункта (координаты берут с карты с точностью не грубее 30”). Планирование осуществляют по данным соответствующего альманаха, полученного на дату отстоящую не более чем на 10 суток от даты наблюдений.
ТЕХНОЛОГИЧЕСКАЯ ПОСЛЕДОВАТЕЛЬНОСТЬ 1. Планирование спутниковых наблюдений Цель планирования – прогноз геометрических и иных параметров спутникового созвездия на момент проведения работ для определения моментов наблюдений и временных интервалов, в которых параметры наблюдений соответствуют установленным требованиям: Угол отсечки – 15 градусов; Число одновременно наблюдаемых на пункте ИСЗ – 5; Наблюдения планируют для каждого пункта (координаты берут с карты с точностью не грубее 30”). Планирование осуществляют по данным соответствующего альманаха, полученного на дату отстоящую не более чем на 10 суток от даты наблюдений.
 • Центрирование на пунктом фазового центра антенны (точки") е 2. Производство спутниковых наблюдений (статика) • Центрирование на пунктом фазового центра антенны (точки в которую поступают сигналы с ИСЗ) – выполняется с помощью оптического отвеса с СКО < 0, 5 мм. • Ориентирование антенны на север. • пункта и точкой относимости антенны). • Включение приемника. жительность ерения, утниковые орых • зависит от класса создаваемой сети. • Заполнениежурналаспутниковыхнаблюдений(Дата, объект наблюдений, определяемый пункт, пункты, участвующие в сеансе, тип и номер приемника, тип и номер антенны, значение высоты антенны (до мм), время начала и окончания сеанса наблюдений, условия наблюдения на пункте, дискретность, маска, тип измерений, должность и фамилия наблюдателя, наименование организации, метеоданные и т. д).
е 2. Производство спутниковых наблюдений (статика) • Центрирование на пунктом фазового центра антенны (точки в которую поступают сигналы с ИСЗ) – выполняется с помощью оптического отвеса с СКО < 0, 5 мм. • Ориентирование антенны на север. • пункта и точкой относимости антенны). • Включение приемника. жительность ерения, утниковые орых • зависит от класса создаваемой сети. • Заполнениежурналаспутниковыхнаблюдений(Дата, объект наблюдений, определяемый пункт, пункты, участвующие в сеансе, тип и номер приемника, тип и номер антенны, значение высоты антенны (до мм), время начала и окончания сеанса наблюдений, условия наблюдения на пункте, дискретность, маска, тип измерений, должность и фамилия наблюдателя, наименование организации, метеоданные и т. д).
 2. Производство спутниковых наблюдений Установка штатива над центром пункта Проверка центрировки и ориентирование на север Центрирование и горизонтирование Измерение высоты антенны (разные способы) Соединение приемника, антенны и батарей Включение приемника
2. Производство спутниковых наблюдений Установка штатива над центром пункта Проверка центрировки и ориентирование на север Центрирование и горизонтирование Измерение высоты антенны (разные способы) Соединение приемника, антенны и батарей Включение приемника
 Методы определения координат Методы группы: позиционирования делятся на две определение абсолютных координат местоположения из псевдодальностей, полученных по дальномерным кодам (C/A, P, СТ, ВТ) – автономный и дифференциальный методы; определение приращения координат (или вектора) между пунктами, на которых установлены приемники, из псевдодальностей, полученных по измерениям фаз несущей частоты сигнала спутников – относительный метод.
Методы определения координат Методы группы: позиционирования делятся на две определение абсолютных координат местоположения из псевдодальностей, полученных по дальномерным кодам (C/A, P, СТ, ВТ) – автономный и дифференциальный методы; определение приращения координат (или вектора) между пунктами, на которых установлены приемники, из псевдодальностей, полученных по измерениям фаз несущей частоты сигнала спутников – относительный метод.
 Методы определения координат Автономное позиционирование – автономное в том смысле, что координаты местоположения приемника определяются независимо от измерений, выполняемых другими приемниками. Данный метод чувствителен ко всем источникам погрешностей: погрешности в координатах спутников, влияние среды распространения и внешних воздействий, геометрический фактор. Как уже отмечалось, в GPS точность абсолютного позиционирования для гражданских пользователей составляет примерно 25100 м по C/A-коду и примерно 30 см – для военных пользователей по P-коду. При точных измерениях автономное позиционирование используется для нахождения приближенных координат.
Методы определения координат Автономное позиционирование – автономное в том смысле, что координаты местоположения приемника определяются независимо от измерений, выполняемых другими приемниками. Данный метод чувствителен ко всем источникам погрешностей: погрешности в координатах спутников, влияние среды распространения и внешних воздействий, геометрический фактор. Как уже отмечалось, в GPS точность абсолютного позиционирования для гражданских пользователей составляет примерно 25100 м по C/A-коду и примерно 30 см – для военных пользователей по P-коду. При точных измерениях автономное позиционирование используется для нахождения приближенных координат.
 Методы определения координат Принцип дифференциального позиционирования заключается в следующем. Измерения псевдодальностей выполняются по дальномерным кодам одновременно на двух (или более) пунктах: т. н. базовой станции, расположенной на пункте с известными координатами, и мобильной станции, расположенной на определяемом пункте. На базовой станции измеренные псевдодальности сравниваются с вычисленными по координатам и определяются их разности. Эти разности называются дифференциальными поправками. Данный метод основан на предположении, что многие погрешности одинаково влияют на измерения, выполняемые на каждой станции. В самом деле, погрешности измерений по C/A-коду и возникающие из-за режима SA, на обеих станциях практически одни и те же. Влияние атмосферы на разных линиях может несколько различаться по причинам разной длины трасс и локальных неоднородностей на них. Однако экспериментальными данными установлено, что при расстоянии между пунктами менее 10 км, влияние атмосферы одинаково для обоих пунктов. Погрешности в координатах спутников также исключаются, причем в значительной мере. При погрешности координат спутников 10 м и расстоянии между пунктами 10 км разница в искажениях псевдодальностей до базовой и мобильной станций составляет 5 мм. Чем ближе расположены станции, тем точнее выполняется коррекция. Поправки передаются на мобильную станцию, корректируя тем самым измерения, в реальном времени или учитываются в ходе вычисления координат после измерений. Передача и прием поправок в специальном формате RTCM в реальном времени выполняется при помощи специального оборудования – радиомодема. Передаваемые поправки быстро "стареют" и поэтому одновременно с поправками передают их "возраст" и данные о скорости их изменения. Точность дифференциального позиционирования около 1 -5 м.
Методы определения координат Принцип дифференциального позиционирования заключается в следующем. Измерения псевдодальностей выполняются по дальномерным кодам одновременно на двух (или более) пунктах: т. н. базовой станции, расположенной на пункте с известными координатами, и мобильной станции, расположенной на определяемом пункте. На базовой станции измеренные псевдодальности сравниваются с вычисленными по координатам и определяются их разности. Эти разности называются дифференциальными поправками. Данный метод основан на предположении, что многие погрешности одинаково влияют на измерения, выполняемые на каждой станции. В самом деле, погрешности измерений по C/A-коду и возникающие из-за режима SA, на обеих станциях практически одни и те же. Влияние атмосферы на разных линиях может несколько различаться по причинам разной длины трасс и локальных неоднородностей на них. Однако экспериментальными данными установлено, что при расстоянии между пунктами менее 10 км, влияние атмосферы одинаково для обоих пунктов. Погрешности в координатах спутников также исключаются, причем в значительной мере. При погрешности координат спутников 10 м и расстоянии между пунктами 10 км разница в искажениях псевдодальностей до базовой и мобильной станций составляет 5 мм. Чем ближе расположены станции, тем точнее выполняется коррекция. Поправки передаются на мобильную станцию, корректируя тем самым измерения, в реальном времени или учитываются в ходе вычисления координат после измерений. Передача и прием поправок в специальном формате RTCM в реальном времени выполняется при помощи специального оборудования – радиомодема. Передаваемые поправки быстро "стареют" и поэтому одновременно с поправками передают их "возраст" и данные о скорости их изменения. Точность дифференциального позиционирования около 1 -5 м.
 заключается в одновременном выполнении") Методы определения координат Относительный метод определения координат местоположения (относительное позиционирование) заключается в одновременном выполнении спутниковых измерений двумя (и более) приемниками. В относительном методе через абсолютные координаты пунктов, полученные из непосредственных измерений, определяется приращение координат (пространственный вектор, baseline) между ними, которое будет свободно от ошибок абсолютного позиционирования. Таким образом, когда один приемник установлен на пункте с известными координатами, а другой – на определяемом, то пространственные координаты второго пункта определяются через вычисляемое приращение координат. В случае, когда оба приемника устанавливаются на пунктах с неизвестными координатами, определяется просто приращение координат, через которое можно вычислить расстояние и превышение между пунктами, азимут линии. Применение относительного метода позволяет определить пространственный вектор (baseline) между пунктами с точностью 5 мм + 1 мм× 10 -6 D, где D – расстояние между пунктами в мм.
Методы определения координат Относительный метод определения координат местоположения (относительное позиционирование) заключается в одновременном выполнении спутниковых измерений двумя (и более) приемниками. В относительном методе через абсолютные координаты пунктов, полученные из непосредственных измерений, определяется приращение координат (пространственный вектор, baseline) между ними, которое будет свободно от ошибок абсолютного позиционирования. Таким образом, когда один приемник установлен на пункте с известными координатами, а другой – на определяемом, то пространственные координаты второго пункта определяются через вычисляемое приращение координат. В случае, когда оба приемника устанавливаются на пунктах с неизвестными координатами, определяется просто приращение координат, через которое можно вычислить расстояние и превышение между пунктами, азимут линии. Применение относительного метода позволяет определить пространственный вектор (baseline) между пунктами с точностью 5 мм + 1 мм× 10 -6 D, где D – расстояние между пунктами в мм.
 Методы определения координат 1. Статический – при котором наблюдения подвижным приёмником на точке выполняют одним приёмом продолжительностью не менее 1 часа. Точность метода при использовании фазовых наблюдений: • Для двухчастотных приемников: в плане: 5 мм + 1 мм/км * D; по высоте: 10 мм + 1 мм/км * D; • Для одночастотных приемников: в плане: 5 мм + 1 мм/км * D - (при D < 10 км); 5 мм + 2 мм/км * D - (при D > 10 км); по высоте: 10 мм + 2 мм/км * D).
Методы определения координат 1. Статический – при котором наблюдения подвижным приёмником на точке выполняют одним приёмом продолжительностью не менее 1 часа. Точность метода при использовании фазовых наблюдений: • Для двухчастотных приемников: в плане: 5 мм + 1 мм/км * D; по высоте: 10 мм + 1 мм/км * D; • Для одночастотных приемников: в плане: 5 мм + 1 мм/км * D - (при D < 10 км); 5 мм + 2 мм/км * D - (при D > 10 км); по высоте: 10 мм + 2 мм/км * D).
 Методы определения координат 2. Быстрый статический – при котором наблюдения подвижным приёмником на точке выполняют одним приёмом продолжительностью 5 – 20 минут. Число наблюдаемых спутников Продолжительность наблюдений, мин 4 ≥ 20 5 6 и более 10 – 20 5 - 10
Методы определения координат 2. Быстрый статический – при котором наблюдения подвижным приёмником на точке выполняют одним приёмом продолжительностью 5 – 20 минут. Число наблюдаемых спутников Продолжительность наблюдений, мин 4 ≥ 20 5 6 и более 10 – 20 5 - 10
 Методы определения координат 3. Реоккупации – при котором наблюдения подвижным приёмником на точке выполняют двумя приёмами продолжительностью не менее 10 минут каждый с интервалом между выполнением приёмов от 1 до 4 часов. Приёмы должны быть выполнены одним и тем же приёмником. 4. Кинематический – при котором подвижный приёмник находится в режиме непрерывной работы как во время выполнения приёма на точке, так и во время перемещения между точками. Его разновидностями являются способ «стой-иди» и способ непрерывной кинематики. Работа способом «стой-иди» складывается из выполнения подвижным приёмником приёма, называемого инициализацией (продолжительностью около 15 минут), и выполнения связанных с этой инициализацией приёмов на определяемых точках продолжительностью до 1 минуты. При реализации способа непрерывной кинематики остановок на точках для выполнения приёма не требуется. Однако точность этого способа для определения координат и высот пунктов недостаточна, и использовать его для этих работ не рекомендуется.
Методы определения координат 3. Реоккупации – при котором наблюдения подвижным приёмником на точке выполняют двумя приёмами продолжительностью не менее 10 минут каждый с интервалом между выполнением приёмов от 1 до 4 часов. Приёмы должны быть выполнены одним и тем же приёмником. 4. Кинематический – при котором подвижный приёмник находится в режиме непрерывной работы как во время выполнения приёма на точке, так и во время перемещения между точками. Его разновидностями являются способ «стой-иди» и способ непрерывной кинематики. Работа способом «стой-иди» складывается из выполнения подвижным приёмником приёма, называемого инициализацией (продолжительностью около 15 минут), и выполнения связанных с этой инициализацией приёмов на определяемых точках продолжительностью до 1 минуты. При реализации способа непрерывной кинематики остановок на точках для выполнения приёма не требуется. Однако точность этого способа для определения координат и высот пунктов недостаточна, и использовать его для этих работ не рекомендуется.
 ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
ОБРАБОТКА РЕЗУЛЬТАТОВ ИЗМЕРЕНИЙ
 ПРЕДВАРИТЕЛЬНАЯ ОБРАБОТКА Результаты спутниковых наблюдений передаются с приемника или его контроллера на компьютер для постобработки. Постобработка информации, полученной приемниками от НС, проводится в два этапа: предварительная обработка и уравнивание геодезического построения (окончательная обработка). Предварительная обработка включает: обработку файлов спутниковых наблюдений, оперативный контроль и оценку качества выполненных построений, выявление пунктов, на которых необходимо повторить наблюдения, подготовку данных для уравнивания. Окончательная обработка включает совместное уравнивание измерений на пунктах объекта на основе метода наименьших квадратов, вычисление уравненных координат пунктов с оценкой их точности, преобразование в требуемую систему координат.
ПРЕДВАРИТЕЛЬНАЯ ОБРАБОТКА Результаты спутниковых наблюдений передаются с приемника или его контроллера на компьютер для постобработки. Постобработка информации, полученной приемниками от НС, проводится в два этапа: предварительная обработка и уравнивание геодезического построения (окончательная обработка). Предварительная обработка включает: обработку файлов спутниковых наблюдений, оперативный контроль и оценку качества выполненных построений, выявление пунктов, на которых необходимо повторить наблюдения, подготовку данных для уравнивания. Окончательная обработка включает совместное уравнивание измерений на пунктах объекта на основе метода наименьших квадратов, вычисление уравненных координат пунктов с оценкой их точности, преобразование в требуемую систему координат.
 В настоящее время применяется широкий арсенал программных средств для постобработки спутниковых измерений: Trimble Geomatics Office, Spectrum Survey (Sokkia), Aschtech Solutions, 3 S PACK (Thales), Geo Office (Leica), SKI и другие. Проведена определенная унификация, позволяющая обрабатывать разными программами информацию большинства типов приемников. Для этого применяются специальные универсальные форматы: данных измерений — RINEX (Receiver Independent Exchange), представления данных в ПО — SINEX (Software Independent Exchange). Современные программные пакеты поддерживают экспорт данных в универсальных форматах. Например, пакет Trimble Geomatics Office может принимать и обрабатывать GPS-данные приемников в форматах Trimble и RINEX; пакет 3 S PACK — в форматах Thales и RINEX. Формат RINEX не зависит от конкретного приемника и унифицирует форматы файлов GPS-измерений, метеоданных, навигационных сообщений.
В настоящее время применяется широкий арсенал программных средств для постобработки спутниковых измерений: Trimble Geomatics Office, Spectrum Survey (Sokkia), Aschtech Solutions, 3 S PACK (Thales), Geo Office (Leica), SKI и другие. Проведена определенная унификация, позволяющая обрабатывать разными программами информацию большинства типов приемников. Для этого применяются специальные универсальные форматы: данных измерений — RINEX (Receiver Independent Exchange), представления данных в ПО — SINEX (Software Independent Exchange). Современные программные пакеты поддерживают экспорт данных в универсальных форматах. Например, пакет Trimble Geomatics Office может принимать и обрабатывать GPS-данные приемников в форматах Trimble и RINEX; пакет 3 S PACK — в форматах Thales и RINEX. Формат RINEX не зависит от конкретного приемника и унифицирует форматы файлов GPS-измерений, метеоданных, навигационных сообщений.
 Большинство программ обработки спутниковых геодезических измерений содержат следующие основные модули: планирование измерений на основе обработки альманаха НС и данных о препятствиях на пунктах объекта; передача результатов измерений с приемников в ПК для постобработки; предварительная обработка, контроль качества измерений; окончательная обработка; организация базы данных и сервисные функции. Используя программное обеспечение, создают проект, в рамках которого будут вводиться данные и осуществляться постобработка.
Большинство программ обработки спутниковых геодезических измерений содержат следующие основные модули: планирование измерений на основе обработки альманаха НС и данных о препятствиях на пунктах объекта; передача результатов измерений с приемников в ПК для постобработки; предварительная обработка, контроль качества измерений; окончательная обработка; организация базы данных и сервисные функции. Используя программное обеспечение, создают проект, в рамках которого будут вводиться данные и осуществляться постобработка.
 Модуль передачи данных предназначен для управления процессом передачи результатов измерений и преобразования данных из компактного формата приемника в формат, используемый в ПО. Информация в память приемника записана в виде файлов базовой (опорной) и передвижной станций. Она содержит кодовую, фазовую, эфемеридную и иную информацию, полученную от НС, а также данные о станции. Полевые файлы с приемников переписывают в базу открытого для обработки проекта. В передаче данных используется окно ПО, корректируются названия и номера пунктов, делаются предусмотренные программой установки.
Модуль передачи данных предназначен для управления процессом передачи результатов измерений и преобразования данных из компактного формата приемника в формат, используемый в ПО. Информация в память приемника записана в виде файлов базовой (опорной) и передвижной станций. Она содержит кодовую, фазовую, эфемеридную и иную информацию, полученную от НС, а также данные о станции. Полевые файлы с приемников переписывают в базу открытого для обработки проекта. В передаче данных используется окно ПО, корректируются названия и номера пунктов, делаются предусмотренные программой установки.
 Уравнивание векторов базовых линий выполняется по методу наименьших квадратов в пространственной СК, чаще всего в WGS 84. Вектора базовых линий образуют геодезическую сеть. Уравнивание может выполняться свободной геодезической сети, опирающейся на один исходный пункт, и сети несвободной, опирающейся на избыточное количество пунктов с известными координатами, которые после уравнивания должны сохраниться неизменными. В процессе обработки определяются уравненные по МНК значения координат определяемых пунктов и их СКП, которые сводятся в каталог и могут быть распечатаны в требуемой для отчета форме. Следует отметить, что с увеличением числа избыточных измерений (число наблюдаемых спутников 5 и более), с использованием избыточных исходных пунктов при уравнивании и избыточных связей по базовым линиям снижаются величины СКП при уравнивании, и тем самым повышается точность определяемых координат.
Уравнивание векторов базовых линий выполняется по методу наименьших квадратов в пространственной СК, чаще всего в WGS 84. Вектора базовых линий образуют геодезическую сеть. Уравнивание может выполняться свободной геодезической сети, опирающейся на один исходный пункт, и сети несвободной, опирающейся на избыточное количество пунктов с известными координатами, которые после уравнивания должны сохраниться неизменными. В процессе обработки определяются уравненные по МНК значения координат определяемых пунктов и их СКП, которые сводятся в каталог и могут быть распечатаны в требуемой для отчета форме. Следует отметить, что с увеличением числа избыточных измерений (число наблюдаемых спутников 5 и более), с использованием избыточных исходных пунктов при уравнивании и избыточных связей по базовым линиям снижаются величины СКП при уравнивании, и тем самым повышается точность определяемых координат.
 Преобразование координат из одной системы в другую проводится в рамках применяемого ПО. Так, в Credo ТРАНС КОР можно выполнить преобразование между системами WGS-84, ПЗ 90, СК-42, СК-95, а также перейти в местную из государственной системы по известным параметрам связи. Все современные геодезические программные пакеты вычисляют данные в геоцентрических, геодезических, государственных и местных системах координат. Если параметры перехода в МСК установлены ненадежно, го в ПО предусмотрена трансформация системы на основе пунктов ОГС, координаты которых известны в двух СК. Для этого используют известные пункты, оконтуривающие зону работ. Модуль ПО «преобразование координат» строит для этих пунктов вектора преобразований из одной С К в другую и по ним — изолинии преобразования. Вектора перехода в МСК для вновь определяемых пунктов вычисляются интерполированием с использованием изолиний преобразований координат.
Преобразование координат из одной системы в другую проводится в рамках применяемого ПО. Так, в Credo ТРАНС КОР можно выполнить преобразование между системами WGS-84, ПЗ 90, СК-42, СК-95, а также перейти в местную из государственной системы по известным параметрам связи. Все современные геодезические программные пакеты вычисляют данные в геоцентрических, геодезических, государственных и местных системах координат. Если параметры перехода в МСК установлены ненадежно, го в ПО предусмотрена трансформация системы на основе пунктов ОГС, координаты которых известны в двух СК. Для этого используют известные пункты, оконтуривающие зону работ. Модуль ПО «преобразование координат» строит для этих пунктов вектора преобразований из одной С К в другую и по ним — изолинии преобразования. Вектора перехода в МСК для вновь определяемых пунктов вычисляются интерполированием с использованием изолиний преобразований координат.
 После выполнения преобразований координат производятся окончательные вычисления всех пунктов объекта и формируется файл отчета, координаты в котором приводятся в системе пользователя в соответствии с техническим заданием. Материалы обработки можно экспортировать с помощью сервисного модуля ПО в ГИС, ЗИС и другие информационные системы
После выполнения преобразований координат производятся окончательные вычисления всех пунктов объекта и формируется файл отчета, координаты в котором приводятся в системе пользователя в соответствии с техническим заданием. Материалы обработки можно экспортировать с помощью сервисного модуля ПО в ГИС, ЗИС и другие информационные системы
 Применение программного обеспечения для обработки измерений Leica Geo Office -
Применение программного обеспечения для обработки измерений Leica Geo Office -
 Применение программного обеспечения для обработки измерений Trimble Geomatics Office
Применение программного обеспечения для обработки измерений Trimble Geomatics Office