

Спец разделы ТЭП_9 семестр_Л1_6_2013.ppt
- Количество слайдов: 86
 Специальные разделы теории электропривода Гр. ЭП-09, 5 курс, 9 семестр Асинхронный частотнорегулируемый электропривод Лекция 1 -6. Обзор основных вариантов промышленной реализации частотнорегулируемых электроприводов
Специальные разделы теории электропривода Гр. ЭП-09, 5 курс, 9 семестр Асинхронный частотнорегулируемый электропривод Лекция 1 -6. Обзор основных вариантов промышленной реализации частотнорегулируемых электроприводов
 Литература по дисциплине 1. 2. 3. 4. 5. Электроприводы переменного тока с частотным регулированием: учебник для студ. ВУЗов/ Г. Г. Соколовский. – М. : Издательский центр «Академия» , 2006. – 272 с. Виноградов А. Б. Векторное управление электроприводами переменного тока. / ГОУВПО «Ивановский государственный энергетический университет» . Иваново, 2008. - 319 с. Усольцев А. А. Векторное управление асинхронными двигателями: учеб. пособие по дисциплинам электромеханического цикла / А. А. Усольцев. – СПб. : Изд-во СПб. ГИТМО, 2002. – 42 c. Поздеев А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах: монография. – Чебоксары: Изд-во чуваш. ун-та, 1998. – 172 с. Данилов П. Е. , Крутиков К. К. , Рожков В. В. Управление частотнорегулируемым электроприводом: Конспект лекций по курсу «Специальные разделы ТЭП» . – Смоленск, РИО филиала ГОУВПО «МЭИ (ТУ)» в г. Смоленске, 2008(2012). – 96(100) с.
Литература по дисциплине 1. 2. 3. 4. 5. Электроприводы переменного тока с частотным регулированием: учебник для студ. ВУЗов/ Г. Г. Соколовский. – М. : Издательский центр «Академия» , 2006. – 272 с. Виноградов А. Б. Векторное управление электроприводами переменного тока. / ГОУВПО «Ивановский государственный энергетический университет» . Иваново, 2008. - 319 с. Усольцев А. А. Векторное управление асинхронными двигателями: учеб. пособие по дисциплинам электромеханического цикла / А. А. Усольцев. – СПб. : Изд-во СПб. ГИТМО, 2002. – 42 c. Поздеев А. Д. Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах: монография. – Чебоксары: Изд-во чуваш. ун-та, 1998. – 172 с. Данилов П. Е. , Крутиков К. К. , Рожков В. В. Управление частотнорегулируемым электроприводом: Конспект лекций по курсу «Специальные разделы ТЭП» . – Смоленск, РИО филиала ГОУВПО «МЭИ (ТУ)» в г. Смоленске, 2008(2012). – 96(100) с.
") Частотно-регулируемый электропривод (примеры реализаций преобразователей)
Частотно-регулируемый электропривод (примеры реализаций преобразователей)
") Частотно-регулируемый электропривод (примеры реализаций преобразователей)
Частотно-регулируемый электропривод (примеры реализаций преобразователей)
 Основные фирмы-производители p Мировые лидеры, задающие критерии качества в производстве частотных преобразователей: АВВ, Allen Bradley, Danfoss, Mitsubishi Electric, Schneider Electric, Siemens, Yaskawa p Фирмы, занимающие более скромную нишу: Control Techniques, Emotron, Lenze
Основные фирмы-производители p Мировые лидеры, задающие критерии качества в производстве частотных преобразователей: АВВ, Allen Bradley, Danfoss, Mitsubishi Electric, Schneider Electric, Siemens, Yaskawa p Фирмы, занимающие более скромную нишу: Control Techniques, Emotron, Lenze
 Основные фирмы-производители p производители, стремительно прорывающиеся на отечественный рынок преобразователей частоты с достаточно качественной и надежной продукцией: Alstom, Ansaldo, Baumuller, Delta Electronics, ESTEL, Fuji, General Electric, Hitachi, Honeywell, KEB, LG, Robicon, SEW, Toshiba, Vacon
Основные фирмы-производители p производители, стремительно прорывающиеся на отечественный рынок преобразователей частоты с достаточно качественной и надежной продукцией: Alstom, Ansaldo, Baumuller, Delta Electronics, ESTEL, Fuji, General Electric, Hitachi, Honeywell, KEB, LG, Robicon, SEW, Toshiba, Vacon
") Цены на продукцию у лидеров в области малых мощностей (до 2, 2 к. Вт) – 450 -700 €/к. Вт ; p в области средних мощностей (до 50 к. Вт) – 150 -450 €/к. Вт ; p в области больших мощностей (свыше 50 к. Вт) – 100 -150 €/к. Вт. p
Цены на продукцию у лидеров в области малых мощностей (до 2, 2 к. Вт) – 450 -700 €/к. Вт ; p в области средних мощностей (до 50 к. Вт) – 150 -450 €/к. Вт ; p в области больших мощностей (свыше 50 к. Вт) – 100 -150 €/к. Вт. p
,") Отечественные производители преобразователей частоты «Веспер-Автоматика» , г. Москва; Институт биологического приборостроения РАН (ИБП РАН), г. Пущино, Московской обл. ; «ИРЗ» (Ижевский радиозавод), г. Ижевск; НТЦ «Приводная Техника» , г. Москва; p НПП «Сапфир» , г. Москва; Том. ЗЭЛ, г. Томск; корпорация «Триол-СПб» , г. Санкт-Петербург; «ЭРАСИБ» , г. Новосибирск; ОАО «Электровыпрямитель» , г. Саранск; ОАО «Электропривод» , г. Москва; «Электротекс» , г. Орёл; ЧЭАЗ (Чебоксарский электроаппаратный завод), г. Чебоксары и др. p совместные предприятия «Ansaldo-ВЭИ» ; Gamem, г. Москва; ВЭМЗ-Hitachi, г. Владимир; ЯЭМЗ-Control Techniques, г. Ярославль (цены у отечественных производителей примерно на 3040% ниже западных аналогов) p
Отечественные производители преобразователей частоты «Веспер-Автоматика» , г. Москва; Институт биологического приборостроения РАН (ИБП РАН), г. Пущино, Московской обл. ; «ИРЗ» (Ижевский радиозавод), г. Ижевск; НТЦ «Приводная Техника» , г. Москва; p НПП «Сапфир» , г. Москва; Том. ЗЭЛ, г. Томск; корпорация «Триол-СПб» , г. Санкт-Петербург; «ЭРАСИБ» , г. Новосибирск; ОАО «Электровыпрямитель» , г. Саранск; ОАО «Электропривод» , г. Москва; «Электротекс» , г. Орёл; ЧЭАЗ (Чебоксарский электроаппаратный завод), г. Чебоксары и др. p совместные предприятия «Ansaldo-ВЭИ» ; Gamem, г. Москва; ВЭМЗ-Hitachi, г. Владимир; ЯЭМЗ-Control Techniques, г. Ярославль (цены у отечественных производителей примерно на 3040% ниже западных аналогов) p
 Основные идеи регулирования коорд электропривода совместное регулирование параметров асинхронного двигателя частоты и напряжения питания (такое управление часто называется просто частотным управлением); p частоты и тока статора двигателя (частотно-токовое управление). p
Основные идеи регулирования коорд электропривода совместное регулирование параметров асинхронного двигателя частоты и напряжения питания (такое управление часто называется просто частотным управлением); p частоты и тока статора двигателя (частотно-токовое управление). p
; p U/f") Способы регулирования p Скалярное: p U/f=const (для механизмов с постоянным моментом нагрузки); p U/f 2 = const (для механизмов с вентиляторным моментом нагрузки насосов, компрессоров, вентиляторов, которые по технологии работы требуют неглубокого регулирования скорости) p Векторное.
Способы регулирования p Скалярное: p U/f=const (для механизмов с постоянным моментом нагрузки); p U/f 2 = const (для механизмов с вентиляторным моментом нагрузки насосов, компрессоров, вентиляторов, которые по технологии работы требуют неглубокого регулирования скорости) p Векторное.
 ; p инвертор (АИН или") Основные функциональные устройс преобразователей: p выпрямитель (неуправляемый или управляемый) ; p инвертор (АИН или АИТ)
Основные функциональные устройс преобразователей: p выпрямитель (неуправляемый или управляемый) ; p инвертор (АИН или АИТ)
 – закон переключения") Основные методы управления ключами АИН: p p Разомкнутая ШИМ (программный вариант) – закон переключения при этом задается принудительно ; Замкнутая ШИМ (следящий или релейный вариант) - переключение ключей происходит автоматически по сигналам рассогласования между желаемым и реальным напряжением на выходе инвертора ; ШИМ в комбинации с амплитудноимпульсной модуляцией (АИМ); Многоуровневая ШИМ.
Основные методы управления ключами АИН: p p Разомкнутая ШИМ (программный вариант) – закон переключения при этом задается принудительно ; Замкнутая ШИМ (следящий или релейный вариант) - переключение ключей происходит автоматически по сигналам рассогласования между желаемым и реальным напряжением на выходе инвертора ; ШИМ в комбинации с амплитудноимпульсной модуляцией (АИМ); Многоуровневая ШИМ.
 Схемы силовых частей преобразовате «Классическая схема» - Трехфазный неуправляемый выпрямитель трехфазный автономный инвертор напряжения (основные элементы)
Схемы силовых частей преобразовате «Классическая схема» - Трехфазный неуправляемый выпрямитель трехфазный автономный инвертор напряжения (основные элементы)
 Схемы силовых частей преобразовате Функциональная схема
Схемы силовых частей преобразовате Функциональная схема
 Схемы силовых частей преобразовате Варианты цепей заряда в «классической» схеме преобразователей частоты
Схемы силовых частей преобразовате Варианты цепей заряда в «классической» схеме преобразователей частоты
 Схемы силовых частей преобразовате Однофазный одноключевой корректор коэффициента мощности
Схемы силовых частей преобразовате Однофазный одноключевой корректор коэффициента мощности
 Схемы силовых частей преобразовате Иллюстрация работы модуля «мертвого» времени
Схемы силовых частей преобразовате Иллюстрация работы модуля «мертвого» времени
 Схемы силовых частей преобразовате Схема организации бутстрепного питания драйверов
Схемы силовых частей преобразовате Схема организации бутстрепного питания драйверов
 Схемы силовых частей преобразовате Структура силовых модулей для «классической» схемы трехфазного АИН
Схемы силовых частей преобразовате Структура силовых модулей для «классической» схемы трехфазного АИН
") Схемы силовых частей преобразователь частоты на основе автономного инвертора тока (АИТ)
Схемы силовых частей преобразователь частоты на основе автономного инвертора тока (АИТ)
 Схемы силовых частей преобразователь на основе АИТ на современных коммутирующих элементах (в большинстве случаев, это GTO или IGCT-тиристоры)
Схемы силовых частей преобразователь на основе АИТ на современных коммутирующих элементах (в большинстве случаев, это GTO или IGCT-тиристоры)
") Схемы силовых частей высоковольтны преобразователей. схемы со специальными узлами принудительной коммутации (пример)
Схемы силовых частей высоковольтны преобразователей. схемы со специальными узлами принудительной коммутации (пример)
 Схемы силовых частей высоковольтны преобразователей. схема с последовательным соединением полупроводниковых ключей
Схемы силовых частей высоковольтны преобразователей. схема с последовательным соединением полупроводниковых ключей
 Схемы силовых частей высоковольтны преобразователей. Трехуровневый инвертор для высоковольтных преобразователей частоты
Схемы силовых частей высоковольтны преобразователей. Трехуровневый инвертор для высоковольтных преобразователей частоты
 Схемы силовых частей высоковольтны преобразователей. трехуровневый АИН в реализации Neutral-Point Clamped
Схемы силовых частей высоковольтны преобразователей. трехуровневый АИН в реализации Neutral-Point Clamped
 Схемы силовых частей высоковольтны преобразователей.
Схемы силовых частей высоковольтны преобразователей.
 Схемы силовых частей высоковольтны преобразователей. Форма выходного напряжения преобразователя Perfect Harmony с тремя ячейками на фазу
Схемы силовых частей высоковольтны преобразователей. Форма выходного напряжения преобразователя Perfect Harmony с тремя ячейками на фазу
 Схемы силовых частей высоковольтны преобразователей. 14 -тиуровневый инвертор с многообмоточным трансформатором (каждая вторичная обмотка (в данном случае их 18) многообмоточного трансформатора ТМ подключена к силовой ячейке преобразователя (Power Cell). Каждая подобная ячейка представляет собой «преобразователь в миниатюре» – неуправляемый выпрямитель, фильтр и однофазный АИН на IGBTтранзисторах, которые шунтированы обратными диодами. )
Схемы силовых частей высоковольтны преобразователей. 14 -тиуровневый инвертор с многообмоточным трансформатором (каждая вторичная обмотка (в данном случае их 18) многообмоточного трансформатора ТМ подключена к силовой ячейке преобразователя (Power Cell). Каждая подобная ячейка представляет собой «преобразователь в миниатюре» – неуправляемый выпрямитель, фильтр и однофазный АИН на IGBTтранзисторах, которые шунтированы обратными диодами. )
 Схемы силовых частей высоковольтны преобразователей.
Схемы силовых частей высоковольтны преобразователей.
 Схемы непосредственных преобразоват частоты Тиристорный НПЧ
Схемы непосредственных преобразоват частоты Тиристорный НПЧ
 Схемы непосредственных преобразоват частоты Транзисторный НПЧ
Схемы непосредственных преобразоват частоты Транзисторный НПЧ
 Принципы управления преобразовате частоты Скалярное управление часто подразделяют на: p собственно скалярное управление (типа U/f=const) или регулирование в разомкнутой системе (Scalar Control – SC) ; p более совершенное (Advanced Scalar Control - ASC) – в замкнутой.
Принципы управления преобразовате частоты Скалярное управление часто подразделяют на: p собственно скалярное управление (типа U/f=const) или регулирование в разомкнутой системе (Scalar Control – SC) ; p более совершенное (Advanced Scalar Control - ASC) – в замкнутой.
 Принципы управления преобразовате частоты Управление в замкнутой системе возможно в таких вариантах: p с коррекцией (или компенсацией) скольжения (slip compensation) ; p двухконтурная система с регуляторами скорости и момента (speed control loop and torque control loop).
Принципы управления преобразовате частоты Управление в замкнутой системе возможно в таких вариантах: p с коррекцией (или компенсацией) скольжения (slip compensation) ; p двухконтурная система с регуляторами скорости и момента (speed control loop and torque control loop).
 Принципы управления преобразовате частоты Параметры при скалярном управлении: p входной – регулируемое напряжение статорной цепи асинхронной машины Us; p выходные – потокосцепление статора Ψs и электромагнитный момент М в функции задаваемой частоты питания f статорной цепи по отношению к номинальной частоте сети fн=50 Гц.
Принципы управления преобразовате частоты Параметры при скалярном управлении: p входной – регулируемое напряжение статорной цепи асинхронной машины Us; p выходные – потокосцепление статора Ψs и электромагнитный момент М в функции задаваемой частоты питания f статорной цепи по отношению к номинальной частоте сети fн=50 Гц.
 Принципы управления преобразовате частоты p при скалярном управлении:
Принципы управления преобразовате частоты p при скалярном управлении:
 Принципы управления преобразовате частоты Возможность скалярного управления следует из следующих соображений: p Уравнение электрического равновесия статорной цепи пренебрежении производной потокосцепления pприближенно:
Принципы управления преобразовате частоты Возможность скалярного управления следует из следующих соображений: p Уравнение электрического равновесия статорной цепи пренебрежении производной потокосцепления pприближенно:
 Принципы управления преобразовате частоты Вид статических механических характеристик при различных частотах питающего напряжения
Принципы управления преобразовате частоты Вид статических механических характеристик при различных частотах питающего напряжения
: при построении системы управления непосредственно") Принципы управления преобразовате частоты особенности векторного управления (Vector Control-VC): при построении системы управления непосредственно использована теория обобщенной электрической машины ; p ортогональная система координат жестко связана с потокосцеплением ротора x, y (d, q); p потокосцепление и момент контролируются независимо по аналогии с системой управления ДПТ посредством селективного управления векторами потокосцепления ротора Ψr и одной из компонент тока статора Is , перпендикулярными между собой. p
Принципы управления преобразовате частоты особенности векторного управления (Vector Control-VC): при построении системы управления непосредственно использована теория обобщенной электрической машины ; p ортогональная система координат жестко связана с потокосцеплением ротора x, y (d, q); p потокосцепление и момент контролируются независимо по аналогии с системой управления ДПТ посредством селективного управления векторами потокосцепления ротора Ψr и одной из компонент тока статора Is , перпендикулярными между собой. p
 Принципы управления преобразовате частоты Векторная диаграмма переменных асинхронной машины при ориентации системы координат по потокосцеплению ротора
Принципы управления преобразовате частоты Векторная диаграмма переменных асинхронной машины при ориентации системы координат по потокосцеплению ротора
 Принципы управления преобразовате частоты p Выражения для потокосцепления ротора и тока статора в принятой системе координат: p Электромагнитный момент машины в общем виде: p Уравнение электрического равновесия для цепи ротора:
Принципы управления преобразовате частоты p Выражения для потокосцепления ротора и тока статора в принятой системе координат: p Электромагнитный момент машины в общем виде: p Уравнение электрического равновесия для цепи ротора:
 Принципы управления преобразовате частоты потокосцепление ротора p Откуда ток ротора равен p В итоге p p действительная и мнимая части:
Принципы управления преобразовате частоты потокосцепление ротора p Откуда ток ротора равен p В итоге p p действительная и мнимая части:
 Принципы управления преобразовате частоты p Возможность управления потокосцеплением ротора регулированием составляющей тока статора по оси d следует из дифф. уравнения: p Вторая независимо регулируемая переменная – электромагнитный момент – может управляться воздействием на составляющую тока статора по оси q
Принципы управления преобразовате частоты p Возможность управления потокосцеплением ротора регулированием составляющей тока статора по оси d следует из дифф. уравнения: p Вторая независимо регулируемая переменная – электромагнитный момент – может управляться воздействием на составляющую тока статора по оси q
 Принципы управления преобразовате частоты Упрощенная структурная схема для принципа векторного управления с ориентацией по вектору потокосцепления ротора
Принципы управления преобразовате частоты Упрощенная структурная схема для принципа векторного управления с ориентацией по вектору потокосцепления ротора
 Принципы управления преобразовате частоты Разновидность векторного принципа -прямое управление моментом (Direct Torque Control – DTC). Его особенности: p мгновенные значения момента и потокосцепления формируются непосредственно ключами инвертора (релейное управление, управление в скользящих режимах); производится синтез быстродействующих систем, мгновенно реагирующих на возмущающие воздействия. p
Принципы управления преобразовате частоты Разновидность векторного принципа -прямое управление моментом (Direct Torque Control – DTC). Его особенности: p мгновенные значения момента и потокосцепления формируются непосредственно ключами инвертора (релейное управление, управление в скользящих режимах); производится синтез быстродействующих систем, мгновенно реагирующих на возмущающие воздействия. p
 Принципы управления преобразовате частоты При использовании принципа прямого управления моментом применяется представление работы ключей инвертора в виде шестигранника (используется понятие «обобщенного вектора управления» )
Принципы управления преобразовате частоты При использовании принципа прямого управления моментом применяется представление работы ключей инвертора в виде шестигранника (используется понятие «обобщенного вектора управления» )
") Прямое управление моментом (ABB, теория 1985 г. , первые практические разработки 1995 г. ) – развитие векторного подхода к построению систем управления асинхронным двигателем. Изменение момента производится посредством: В векторном управлении воздействием на составляющую тока статора (момент является косвенной управляемой величиной) В системах ПУМ – воздействием на потокосцепление статора. Его изменение осуществляется путем оптимального переключения ключей АИН.
Прямое управление моментом (ABB, теория 1985 г. , первые практические разработки 1995 г. ) – развитие векторного подхода к построению систем управления асинхронным двигателем. Изменение момента производится посредством: В векторном управлении воздействием на составляющую тока статора (момент является косвенной управляемой величиной) В системах ПУМ – воздействием на потокосцепление статора. Его изменение осуществляется путем оптимального переключения ключей АИН.
 Прямое управление моментом Математическая основа ПУМ: p уравнение электрического равновесия статорной цепи машины в неподвижной системе координат: p выражение для электромагнитного момента, определяемого через потокосцепления:
Прямое управление моментом Математическая основа ПУМ: p уравнение электрического равновесия статорной цепи машины в неподвижной системе координат: p выражение для электромагнитного момента, определяемого через потокосцепления:
 Прямое управление моментом Проекции векторов потокосцеплений можно записать через их модули и текущие значения углов поворота относительно действительной оси: Тогда выражение для электромагнитного момента:
Прямое управление моментом Проекции векторов потокосцеплений можно записать через их модули и текущие значения углов поворота относительно действительной оси: Тогда выражение для электромагнитного момента:
 Прямое управление моментом Допущение при ПУМ: постоянная времени ротора асинхронной машины достаточно велика, т. е. можно считать, что на каждом расчетном шаге модуль потокосцепления ротора 2 остается неизменным. Идея ПУМ: если, воздействуя на пространственный вектор напряжения статора U 1, поддерживать постоянство модуля потокосцепление статора 1 и необходимыми переключения создавать эффект вращения поля статора с нужной скоростью, то электромагнитный момент можно изменить так быстро, как можно изменить угол θ. Малым падением напряжения на активном сопротивлении статора пренебрегают , тогда
Прямое управление моментом Допущение при ПУМ: постоянная времени ротора асинхронной машины достаточно велика, т. е. можно считать, что на каждом расчетном шаге модуль потокосцепления ротора 2 остается неизменным. Идея ПУМ: если, воздействуя на пространственный вектор напряжения статора U 1, поддерживать постоянство модуля потокосцепление статора 1 и необходимыми переключения создавать эффект вращения поля статора с нужной скоростью, то электромагнитный момент можно изменить так быстро, как можно изменить угол θ. Малым падением напряжения на активном сопротивлении статора пренебрегают , тогда
 Прямое управление моментом Тогда проекции вектора напряжения статора на оси αβ будут определять собой скорость изменений проекций вектора 1 в зависимости от значения приложенного напряжения. При переходе от производных к отношению малых конечных величин, для полных значений проекций вектора 1 получаем: Таким образом, изменяя вектор напряжения (воздействуя на u 1α, u 1β), можно поворачивать вектор потокосцепления статора, воздействуя этим на электромагнитный момент машины.
Прямое управление моментом Тогда проекции вектора напряжения статора на оси αβ будут определять собой скорость изменений проекций вектора 1 в зависимости от значения приложенного напряжения. При переходе от производных к отношению малых конечных величин, для полных значений проекций вектора 1 получаем: Таким образом, изменяя вектор напряжения (воздействуя на u 1α, u 1β), можно поворачивать вектор потокосцепления статора, воздействуя этим на электромагнитный момент машины.
 Прямое управление моментом Оценка влияния переключения ключей инвертора на потокосцепление и момент двигателя
Прямое управление моментом Оценка влияния переключения ключей инвертора на потокосцепление и момент двигателя
 Принципы управления преобразовате частоты Отработка дрейфа потокосцепления статора
Принципы управления преобразовате частоты Отработка дрейфа потокосцепления статора
 Прямое управление моментом Общие правила функционирования для всех секторов: p p если в данный момент времени вектор потокосцепления статора расположен в некотором секторе, то приложении вектора напряжения любого из соседних с ним секторов модуль 1 возрастает. При приложении вектора напряжения любого из секторов, сдвинутых на 2 единицы относительно первого, модуль 1 уменьшается; электромагнитный момент двигателя увеличивается, когда вектор 1 поворачивается по направлению вращения двигателя (два соседних вектора); и уменьшается при обратном повороте.
Прямое управление моментом Общие правила функционирования для всех секторов: p p если в данный момент времени вектор потокосцепления статора расположен в некотором секторе, то приложении вектора напряжения любого из соседних с ним секторов модуль 1 возрастает. При приложении вектора напряжения любого из секторов, сдвинутых на 2 единицы относительно первого, модуль 1 уменьшается; электромагнитный момент двигателя увеличивается, когда вектор 1 поворачивается по направлению вращения двигателя (два соседних вектора); и уменьшается при обратном повороте.
 Прямое управление моментом Отличия от «классического» векторного способа в реализации: p p p в системе ПУМ нет ШИМ с постоянной частотой, поэтому не требуется обратное преобразование координат; переключение ключей АИН осуществляется по отклонению истинных значений модулей вектора потокосцепления статора и электромагнитного момента двигателя от их заданных значений; переключения ключей АИН производится в соответствии с таблицей оптимальных переключений.
Прямое управление моментом Отличия от «классического» векторного способа в реализации: p p p в системе ПУМ нет ШИМ с постоянной частотой, поэтому не требуется обратное преобразование координат; переключение ключей АИН осуществляется по отклонению истинных значений модулей вектора потокосцепления статора и электромагнитного момента двигателя от их заданных значений; переключения ключей АИН производится в соответствии с таблицей оптимальных переключений.
 Прямое управление моментом Таблица оптимальных переключений δ δМ Сектор α 3 α 4 α 5 α 6 U 12 U 13 U 14 U 15 U 16 U 11 0 U 17 U 18 – 1 U 16 U 11 U 12 U 13 U 14 U 15 1 0 α 2 1 1 α 1 U 13 U 14 U 15 U 16 U 11 U 12 0 U 18 U 17 – 1 U 15 U 16 U 11 U 12 U 13 U 14
Прямое управление моментом Таблица оптимальных переключений δ δМ Сектор α 3 α 4 α 5 α 6 U 12 U 13 U 14 U 15 U 16 U 11 0 U 17 U 18 – 1 U 16 U 11 U 12 U 13 U 14 U 15 1 0 α 2 1 1 α 1 U 13 U 14 U 15 U 16 U 11 U 12 0 U 18 U 17 – 1 U 15 U 16 U 11 U 12 U 13 U 14
 Прямое управление моментом Результирующая структура при ПУМ
Прямое управление моментом Результирующая структура при ПУМ
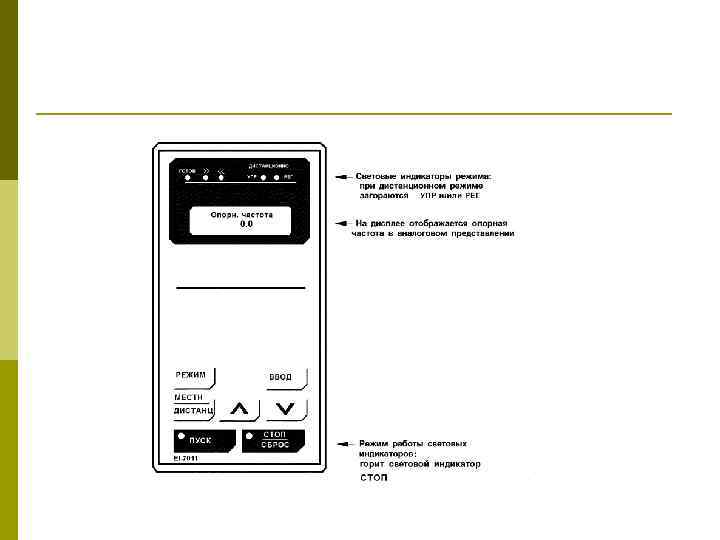
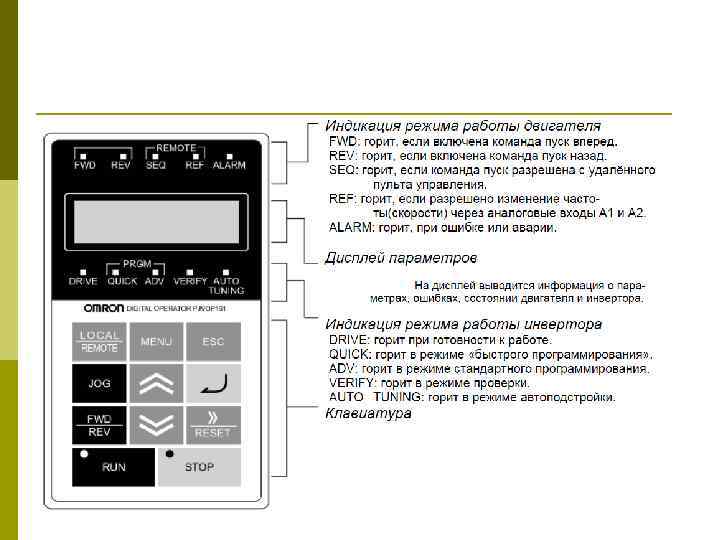
 Пример типичного представления данных о преобразователе ч в материалах фирм-изготовителей
Пример типичного представления данных о преобразователе ч в материалах фирм-изготовителей

 Формирование ШИМ Управление ключами «классического» двухуровнего АИН осуществляется двумя основными методами: p программная ШИМ (разомкнутая) – закон переключения задается принудительно; p следящая ШИМ (замкнутая) – релейный регулятор – переключение ключей происходит по сигналам рассогласования между желаемым и полученным напряжением (током) на выходе инвертора. линейное напряжение двигателя и фазный ток при ШИМ
Формирование ШИМ Управление ключами «классического» двухуровнего АИН осуществляется двумя основными методами: p программная ШИМ (разомкнутая) – закон переключения задается принудительно; p следящая ШИМ (замкнутая) – релейный регулятор – переключение ключей происходит по сигналам рассогласования между желаемым и полученным напряжением (током) на выходе инвертора. линейное напряжение двигателя и фазный ток при ШИМ
 Формирование ШИМ Изменение потенциала фазы при изменении скважности и первая гармоника p Принципы построения самой распространенной разомкнутой симметричной синусоидальной ШИМ для управления АИН, но цифровым способом
Формирование ШИМ Изменение потенциала фазы при изменении скважности и первая гармоника p Принципы построения самой распространенной разомкнутой симметричной синусоидальной ШИМ для управления АИН, но цифровым способом
 Формирование синусоидальной ШИМ цифровым способом Суть метода: амплитуда сигналов управления регулируется в диапазоне от 0 до амплитуды пилы, частота – в требуемом диапазоне управления скоростью АД. p верхний и нижний ключи всегда коммутируются в противофазе, максимально возможная амплитуда выходного сигнала равна половине напряжения звена постоянного тока Ud/2. p выходные импульсы управления ключами трехфазного мостового АИН с ШИМ формируются в моменты сравнения трех симметричных гармонических сигналов управления, имеющих равные амплитуды и фазовые сдвиги в 2π/3, с опорным пилообразным сигналом несущей частоты. p
Формирование синусоидальной ШИМ цифровым способом Суть метода: амплитуда сигналов управления регулируется в диапазоне от 0 до амплитуды пилы, частота – в требуемом диапазоне управления скоростью АД. p верхний и нижний ключи всегда коммутируются в противофазе, максимально возможная амплитуда выходного сигнала равна половине напряжения звена постоянного тока Ud/2. p выходные импульсы управления ключами трехфазного мостового АИН с ШИМ формируются в моменты сравнения трех симметричных гармонических сигналов управления, имеющих равные амплитуды и фазовые сдвиги в 2π/3, с опорным пилообразным сигналом несущей частоты. p
 Формирование синусоидальной ШИМ цифровым способом Анало овый прототип Форм рова-ние синусоидальной ШИМ с «симметричной пилой» для одной из трех стоек АИН
Формирование синусоидальной ШИМ цифровым способом Анало овый прототип Форм рова-ние синусоидальной ШИМ с «симметричной пилой» для одной из трех стоек АИН
 Формирование синусоидальной ШИМ цифровым способом синтез алгоритмов управления АИН упрощается, если представлять его состоящим не из шести ключей, работающих в противофазе, а из трех с переключением в верхнее и нижнее положение.
Формирование синусоидальной ШИМ цифровым способом синтез алгоритмов управления АИН упрощается, если представлять его состоящим не из шести ключей, работающих в противофазе, а из трех с переключением в верхнее и нижнее положение.
 Формирование синусоидальной ШИМ цифровым способом Временные диаграммы – процедура формирования команд состояния ключей в моменты сравнения 3 хфазных сигналов управления в текущий момент времени с опорной пилой на периоде несущей.
Формирование синусоидальной ШИМ цифровым способом Временные диаграммы – процедура формирования команд состояния ключей в моменты сравнения 3 хфазных сигналов управления в текущий момент времени с опорной пилой на периоде несущей.
 Формирование синусоидальной ШИМ цифровым способом Временные диаграммы можно представить вектором состояния фаз А, B, C с тремя компонентами из значений 0 или 1. Тогда период несущей Т представляет собой цикл из 8 интервалов:
Формирование синусоидальной ШИМ цифровым способом Временные диаграммы можно представить вектором состояния фаз А, B, C с тремя компонентами из значений 0 или 1. Тогда период несущей Т представляет собой цикл из 8 интервалов:
 Формирование синусоидальной ШИМ цифровым способом Обобщенный вектор выходного напряжения АИН выступает в качестве векторного сигнала управления нагрузкой – асинхронным двигателем. Ω 8 состояний: шесть из них – ненулевые – образуют вершины шестигранника с векторами, в состоянии которых присутствуют единицы и нули. Два нулевых вектора определяются только всеми нулевыми состояниями или только всеми единичными. 2 3 1 Ψ 4 А 6 5
Формирование синусоидальной ШИМ цифровым способом Обобщенный вектор выходного напряжения АИН выступает в качестве векторного сигнала управления нагрузкой – асинхронным двигателем. Ω 8 состояний: шесть из них – ненулевые – образуют вершины шестигранника с векторами, в состоянии которых присутствуют единицы и нули. Два нулевых вектора определяются только всеми нулевыми состояниями или только всеми единичными. 2 3 1 Ψ 4 А 6 5
 Формирование синусоидальной ШИМ цифровым способом Значение вектора управления для различных комбинаций состояний ключей
Формирование синусоидальной ШИМ цифровым способом Значение вектора управления для различных комбинаций состояний ключей
 Формирование синусоидальной ШИМ цифровым способом В моменты сравнения гармонических сигналов управления и опорной пилы в первом секторе при Сумма всех этих интервалов - половина периода несущей: Отношение амплитуды сигнала управления к амплитуде пилы - относительная величина модуля вектора управления:
Формирование синусоидальной ШИМ цифровым способом В моменты сравнения гармонических сигналов управления и опорной пилы в первом секторе при Сумма всех этих интервалов - половина периода несущей: Отношение амплитуды сигнала управления к амплитуде пилы - относительная величина модуля вектора управления:
 Формирование синусоидальной ШИМ цифровым способом При частотном управлении желаемое или измеренное значение обобщенного вектора управления (напряжения или тока) известно: т. е в каждый момент времени амплитуда и угол с горизонтальной осью определены. Тогда получаем решение уравнений для относительных интервалов внутри полупериода несущей при условии, что обобщенный вектор находится в первом секторе
Формирование синусоидальной ШИМ цифровым способом При частотном управлении желаемое или измеренное значение обобщенного вектора управления (напряжения или тока) известно: т. е в каждый момент времени амплитуда и угол с горизонтальной осью определены. Тогда получаем решение уравнений для относительных интервалов внутри полупериода несущей при условии, что обобщенный вектор находится в первом секторе
 Формирование синусоидальной ШИМ цифровым способом Уравнения составляют идею принципиально микропроцессорной реализации симметричной синусоидальной ШИМ. Для этого достаточно при известных вычислить по длительности рассмотренные относительные интервалы, p организовать из них цикл в пределах периода несущей, p распределить импульсы управления реальными ключами по кодам команд вектора состояния фаз p
Формирование синусоидальной ШИМ цифровым способом Уравнения составляют идею принципиально микропроцессорной реализации симметричной синусоидальной ШИМ. Для этого достаточно при известных вычислить по длительности рассмотренные относительные интервалы, p организовать из них цикл в пределах периода несущей, p распределить импульсы управления реальными ключами по кодам команд вектора состояния фаз p
 Формирование синусоидальной ШИМ цифровым способом В отличие от метода аппаратной реализации, в микропроцессорном аналоге не нужны гармонические сигналы управления переменной амплитуды и частоты, а также сигнал опорной пилы. Детали реализации: Период выходной сети соответствует повороту обобщённого вектора на угол 2 , состоящий из шести секторов /3. /3 Все состояния обобщенного вектора на периоде несущей во всех шести секторах определяются в соответствии с таблицей.
Формирование синусоидальной ШИМ цифровым способом В отличие от метода аппаратной реализации, в микропроцессорном аналоге не нужны гармонические сигналы управления переменной амплитуды и частоты, а также сигнал опорной пилы. Детали реализации: Период выходной сети соответствует повороту обобщённого вектора на угол 2 , состоящий из шести секторов /3. /3 Все состояния обобщенного вектора на периоде несущей во всех шести секторах определяются в соответствии с таблицей.
 Формирование синусоидальной ШИМ цифровым способом Состояние фаз А, В, С в каждом секторе на периоде несущей определяется восьмиразрядным словом четырех различных типов (команда управления).
Формирование синусоидальной ШИМ цифровым способом Состояние фаз А, В, С в каждом секторе на периоде несущей определяется восьмиразрядным словом четырех различных типов (команда управления).
 Формирование синусоидальной ШИМ цифровым способом В итоге, p команда управления 01111110 используется во всех шести секторах: в первом – для управления состоянием фазы А, во втором и третьем – для управления состоянием фазы В и далее. p то же относится и к команде 00011000. p команда 00111100 используется только в нечетных секторах, команда 01011010 – только в четных. Следовательно, получили таблицу истинности, пригодную при синтезе логических переключающих функций.
Формирование синусоидальной ШИМ цифровым способом В итоге, p команда управления 01111110 используется во всех шести секторах: в первом – для управления состоянием фазы А, во втором и третьем – для управления состоянием фазы В и далее. p то же относится и к команде 00011000. p команда 00111100 используется только в нечетных секторах, команда 01011010 – только в четных. Следовательно, получили таблицу истинности, пригодную при синтезе логических переключающих функций.
 Формирование синусоидальной ШИМ цифровым способом Таким образом, микропроцессорная система для формирования симметричной синусоидальной ШИМ включает следующие компоненты: p расчетный блок, который по заданным А и ψ вычисляет p устройство распределения импульсов управления; p блок вычисления временных интервалов – таймер; p блок, определяющий команды состояния фаз. Для реализации алгоритма необходимо определить сектор, в котором в данный момент находится вектор управления. Для использования только одной группой формул нужно текущий угол перевести в местный
Формирование синусоидальной ШИМ цифровым способом Таким образом, микропроцессорная система для формирования симметричной синусоидальной ШИМ включает следующие компоненты: p расчетный блок, который по заданным А и ψ вычисляет p устройство распределения импульсов управления; p блок вычисления временных интервалов – таймер; p блок, определяющий команды состояния фаз. Для реализации алгоритма необходимо определить сектор, в котором в данный момент находится вектор управления. Для использования только одной группой формул нужно текущий угол перевести в местный
 Формирование синусоидальной ШИМ цифровым способом Отличие симплексного метода от симметричной синусоидальной ШИМ состоит в том, что p разбиение периода несущей на интервалы не связывается с условиями совпадения сигналов управления и опорного; p для получения среднего за период несущей значения обобщенного вектора управления решаются необходимые уравнения с использованием трех векторов управления, образующих на комплексной плоскости простую геометрическую фигуру – треугольник (симплекс). Самое простое использовать, например, векторы управления, ближайшие к требуемому обобщенному вектору: два ненулевых и нулевой.
Формирование синусоидальной ШИМ цифровым способом Отличие симплексного метода от симметричной синусоидальной ШИМ состоит в том, что p разбиение периода несущей на интервалы не связывается с условиями совпадения сигналов управления и опорного; p для получения среднего за период несущей значения обобщенного вектора управления решаются необходимые уравнения с использованием трех векторов управления, образующих на комплексной плоскости простую геометрическую фигуру – треугольник (симплекс). Самое простое использовать, например, векторы управления, ближайшие к требуемому обобщенному вектору: два ненулевых и нулевой.
 Симплексные алгоритмы управления Для случая расположения синтезируемого обобщенного вектора напряжения в первом секторе уравнения проекций на оси α и β имеют вид Ω μ 2 2 3 4 Суммарная длительность трех интервалов составляет период несущей при условии, что длительности нулевых интервалов одинаковы (равны μ 0). μ 0+ μ 0 - 5 А 1 Ψ μ 1 6
Симплексные алгоритмы управления Для случая расположения синтезируемого обобщенного вектора напряжения в первом секторе уравнения проекций на оси α и β имеют вид Ω μ 2 2 3 4 Суммарная длительность трех интервалов составляет период несущей при условии, что длительности нулевых интервалов одинаковы (равны μ 0). μ 0+ μ 0 - 5 А 1 Ψ μ 1 6
 Симплексные алгоритмы управления Тогда система из трех уравнений с тремя неизвестными дает решение для искомых интервалов: Т. е. можно рассчитать интервалы и организовать из простые циклы, в которых переход между состояниями АИН характеризуется переключением только одной фазы на периоде несущей.
Симплексные алгоритмы управления Тогда система из трех уравнений с тремя неизвестными дает решение для искомых интервалов: Т. е. можно рассчитать интервалы и организовать из простые циклы, в которых переход между состояниями АИН характеризуется переключением только одной фазы на периоде несущей.
 Симплексные алгоритмы управления Это такие циклы, как , например, или При организации сложных циклов из двух простых (т. е. на двух периодах несущей) можно добиться значительного улучшения такого показателя, к примеру, как минимальное число переключений на периоде несущей или достижения большей длительности между переключениями силовых ключей одной фазы. Пример: При этом переход от одного цикла к другому не требует переключений.
Симплексные алгоритмы управления Это такие циклы, как , например, или При организации сложных циклов из двух простых (т. е. на двух периодах несущей) можно добиться значительного улучшения такого показателя, к примеру, как минимальное число переключений на периоде несущей или достижения большей длительности между переключениями силовых ключей одной фазы. Пример: При этом переход от одного цикла к другому не требует переключений.
 Симплексные алгоритмы управления Состояния фаз на каждом из шести секторов при алгоритмах β- и β+ Чтобы переход от состояния μ 0 к последующему состоянию происходил только одним переключением фазы, требуется варьирование состояния μ 0 (μ 0+ или μ 0 -).
Симплексные алгоритмы управления Состояния фаз на каждом из шести секторов при алгоритмах β- и β+ Чтобы переход от состояния μ 0 к последующему состоянию происходил только одним переключением фазы, требуется варьирование состояния μ 0 (μ 0+ или μ 0 -).
 Симплексные алгоритмы управления Особенности полученных алгоритмов управления: p описанный симплексный алгоритм в своём цикле работы использует нулевой вектор управления (состояние μ 0+ или μ 0 -). В АИН это состояние получается, если три его силовых ключа отключены от положительной или отрицательной шины питания; p во время работы алгоритма каждый раз происходит разрыв в цепи индуктивности его фаз, что может приводить к перенапряжениям на силовых ключах Поэтому созданы варианты симплексного разбиения без использования нулевого вектора управления
Симплексные алгоритмы управления Особенности полученных алгоритмов управления: p описанный симплексный алгоритм в своём цикле работы использует нулевой вектор управления (состояние μ 0+ или μ 0 -). В АИН это состояние получается, если три его силовых ключа отключены от положительной или отрицательной шины питания; p во время работы алгоритма каждый раз происходит разрыв в цепи индуктивности его фаз, что может приводить к перенапряжениям на силовых ключах Поэтому созданы варианты симплексного разбиения без использования нулевого вектора управления
 Симплексные алгоритмы управления Вариант такого симплексного разбиения – алгоритм Р 4 -6.
Симплексные алгоритмы управления Вариант такого симплексного разбиения – алгоритм Р 4 -6.
") Симплексные алгоритмы управления вся комплексная плоскость действия шести векторов напряжения покрывается непересекающимися треугольниками (симплексами) четырех различных типов с общей перемещающейся вершиной (образуется шесть типов разбиений); p каждому из разбиений отводится 1/6 часть периода несущей частоты ШИМ; p Если вектор управления известен по амплитуде А и имеет известный угол поворота Ψ относительно горизонтальной вещественной оси, то для каждого из шести разбиений он будет расположен в поле только одного из четырех возможных симплексов. p
Симплексные алгоритмы управления вся комплексная плоскость действия шести векторов напряжения покрывается непересекающимися треугольниками (симплексами) четырех различных типов с общей перемещающейся вершиной (образуется шесть типов разбиений); p каждому из разбиений отводится 1/6 часть периода несущей частоты ШИМ; p Если вектор управления известен по амплитуде А и имеет известный угол поворота Ψ относительно горизонтальной вещественной оси, то для каждого из шести разбиений он будет расположен в поле только одного из четырех возможных симплексов. p
 Симплексные алгоритмы управления Особенности разбиения Р 4 -6 : p т. к. симплексы в разных разбиениях подобны, можно использовать это подобие для упрощения необходимых математических действий по определению относительных длительностей частичных интервалов в каждом из разбиений. p результирующие длительности, которые будут в дальнейшем определять разбиение периода несущей на шесть интервалов μ 1 --μ 6, могут быть получены как сумма частичных одноименных составляющих, рассчитанных для каждого из шести разбиений.
Симплексные алгоритмы управления Особенности разбиения Р 4 -6 : p т. к. симплексы в разных разбиениях подобны, можно использовать это подобие для упрощения необходимых математических действий по определению относительных длительностей частичных интервалов в каждом из разбиений. p результирующие длительности, которые будут в дальнейшем определять разбиение периода несущей на шесть интервалов μ 1 --μ 6, могут быть получены как сумма частичных одноименных составляющих, рассчитанных для каждого из шести разбиений.
 Симплексные алгоритмы управления Общие задачи, подлежащие решению в реальном масштабе времени при реализации симплексных алгоритмов на контроллерах: p задача вычисления относительных длительностей разбиения периода несущей на шесть интервалов времени, p задача реализации вычисленных временных интервалов и превращения их в реальные импульсы управления ключами АИН.
Симплексные алгоритмы управления Общие задачи, подлежащие решению в реальном масштабе времени при реализации симплексных алгоритмов на контроллерах: p задача вычисления относительных длительностей разбиения периода несущей на шесть интервалов времени, p задача реализации вычисленных временных интервалов и превращения их в реальные импульсы управления ключами АИН.