

Современные CAD - копия.pptx
- Количество слайдов: 30
 Современные CAD/CAM – системы для стоматологии
Современные CAD/CAM – системы для стоматологии
 Сканеры Внеротовые -механическое зондирование -метод триангуляции -метод фотограмметрии со структурированной подсветкой полосой лазерного света -метод фотограмметрии с подсветкой множеством световых полос -метод голографии Внутриротовые
Сканеры Внеротовые -механическое зондирование -метод триангуляции -метод фотограмметрии со структурированной подсветкой полосой лазерного света -метод фотограмметрии с подсветкой множеством световых полос -метод голографии Внутриротовые
 Механическое зондирование Снятие трехмерной информации о рельефе модели с помощью электронномеханического зонда. Американская система Denti. Cad.
Механическое зондирование Снятие трехмерной информации о рельефе модели с помощью электронномеханического зонда. Американская система Denti. Cad.

 Метод триангуляции При сканировании лазерным лучом получается облако точек. Точки соединяются между собой линиями, образуя некую поверхность , состоящую из множества маленьких треугольников.
Метод триангуляции При сканировании лазерным лучом получается облако точек. Точки соединяются между собой линиями, образуя некую поверхность , состоящую из множества маленьких треугольников.

 Сетчатый каркас из маленьких треугольников задает форму поверхности
Сетчатый каркас из маленьких треугольников задает форму поверхности
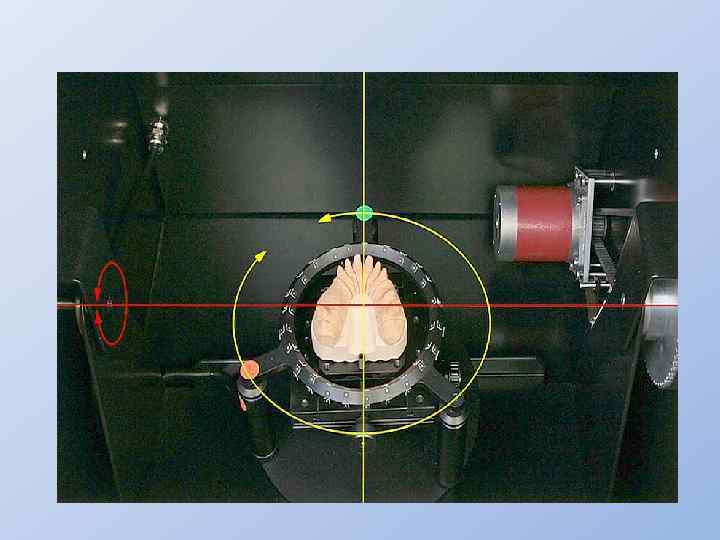
 Штампики зубов или модель фиксируются на подставке. Лазерный луч проецируется на модель , которая осуществляет поступательное и вращательное движение.
Штампики зубов или модель фиксируются на подставке. Лазерный луч проецируется на модель , которая осуществляет поступательное и вращательное движение.
 Метод фотограмметрии Сканирование путем проецирования на объект полосы лазерного света и регистрация его положения на объекте с помощью камеры ( при этом регистрируется положение не одной, а множества точек поверхности по линии проекции лазерного луча).
Метод фотограмметрии Сканирование путем проецирования на объект полосы лазерного света и регистрация его положения на объекте с помощью камеры ( при этом регистрируется положение не одной, а множества точек поверхности по линии проекции лазерного луча).
") 1. Предварительное сканирование всей модели 2. Сканирование всех штампиков (штампики фиксируются в отдельных держателях) 3. Совмещение штампиков и общей модели проводится автоматически путем максимально полного совмещения с координатами поверхностей штампиков, полученных после предварительного сканирования)
1. Предварительное сканирование всей модели 2. Сканирование всех штампиков (штампики фиксируются в отдельных держателях) 3. Совмещение штампиков и общей модели проводится автоматически путем максимально полного совмещения с координатами поверхностей штампиков, полученных после предварительного сканирования)

 • Эти аппараты сканируют материалы любых цветов • Содержат 2 регистрирующие камеры и 3 -х осевую подвижную платформу • Сканер позволяет работать с силиконовыми и альгинатными оттисками
• Эти аппараты сканируют материалы любых цветов • Содержат 2 регистрирующие камеры и 3 -х осевую подвижную платформу • Сканер позволяет работать с силиконовыми и альгинатными оттисками
 Метод фотограмметрии со структурированной подсветкой множеством световых полос Проецирование на объект меняющихся по ширине световых полос и регистрации их положения на объекте с помощью цифровой камеры. Положение самого объекта постоянно меняется путем его вращения. Т. о получается множество цифровых фотоснимков, математический анализ которых позволяет рассчитать координаты поверхности объекта.
Метод фотограмметрии со структурированной подсветкой множеством световых полос Проецирование на объект меняющихся по ширине световых полос и регистрации их положения на объекте с помощью цифровой камеры. Положение самого объекта постоянно меняется путем его вращения. Т. о получается множество цифровых фотоснимков, математический анализ которых позволяет рассчитать координаты поверхности объекта.
 • Модель устанавливается на столик внутренней камеры сканера • Сканирование всей модели • Прицельное сканирование отдельных штампиков (т. к некоторые участки поверхности протезного ложа могут находиться в «тени» соседних зубов) • Штампики должны быть точно установлены на своих местах (т. о программа сканирования определяет координаты их взаимного расположения) • Использование 3 камер (2 регистрирующие и 1 для слежения за процессом сканирования • Использование гипса светлых тонов
• Модель устанавливается на столик внутренней камеры сканера • Сканирование всей модели • Прицельное сканирование отдельных штампиков (т. к некоторые участки поверхности протезного ложа могут находиться в «тени» соседних зубов) • Штампики должны быть точно установлены на своих местах (т. о программа сканирования определяет координаты их взаимного расположения) • Использование 3 камер (2 регистрирующие и 1 для слежения за процессом сканирования • Использование гипса светлых тонов
 Метод голографии Проецируемый и отраженный лучи идут по одной траектории. Это позволяет измерять глубокие полости с вертикально наклоненными стенками , сканировать поверхности с углом наклона до 85 градусов. Поляризационный свет , проходящий через дифракционную решетку, образует на поверхности голографические кольца. Расстояния между кольцами могут составлять микроны и определяются длиной волны лазерного света перепадом высот.
Метод голографии Проецируемый и отраженный лучи идут по одной траектории. Это позволяет измерять глубокие полости с вертикально наклоненными стенками , сканировать поверхности с углом наклона до 85 градусов. Поляризационный свет , проходящий через дифракционную решетку, образует на поверхности голографические кольца. Расстояния между кольцами могут составлять микроны и определяются длиной волны лазерного света перепадом высот.
 Поле сканирования Большинство систем охватывают поле сканирования 80 х90 мм или 90 х90 мм (что достаточно для сканирования гипсовой модели всего зубного ряда) Некоторые системы имеют ограничения по высоте сканирования
Поле сканирования Большинство систем охватывают поле сканирования 80 х90 мм или 90 х90 мм (что достаточно для сканирования гипсовой модели всего зубного ряда) Некоторые системы имеют ограничения по высоте сканирования
 Все методы сканирования зависимы от свойств отражающей поверхности объекта Время сканирования одного штампика от 40 секунд до 2 минут Может быть использован либо специальный гипс, либо стандартный гипс 4 класса Рекомендовано покрывать модель спреем белого цвета
Все методы сканирования зависимы от свойств отражающей поверхности объекта Время сканирования одного штампика от 40 секунд до 2 минут Может быть использован либо специальный гипс, либо стандартный гипс 4 класса Рекомендовано покрывать модель спреем белого цвета
 Статистика: 59 % оттисков признается некачественными До 36 % стоматологов переснимают оттиски 3 и более раз До 36 % стоматологов хотя бы 1 раз в месяц вызывают пациента на повторное посещение из-за некачественного оттиска
Статистика: 59 % оттисков признается некачественными До 36 % стоматологов переснимают оттиски 3 и более раз До 36 % стоматологов хотя бы 1 раз в месяц вызывают пациента на повторное посещение из-за некачественного оттиска
 Внутриротовые сканеры экономят время, требуемое на: • Выбор и примерку оттискной ложки • Размешивание и ожидание застывания оттискного материала • Дезинфекцию оттиска • Упаковку оттиска для передачи в лабораторию • Транспортировку оттиска в лабораторию
Внутриротовые сканеры экономят время, требуемое на: • Выбор и примерку оттискной ложки • Размешивание и ожидание застывания оттискного материала • Дезинфекцию оттиска • Упаковку оттиска для передачи в лабораторию • Транспортировку оттиска в лабораторию
 Из истории: «Прародителем» внутриротовых сканеров является французская система Duret. Информацию получали непосредственно во рту с помощью лазерного источника света и 2 эндоскопов. Лазерный диод, который через эндоскоп проецировал свет на зону обзора. Второй эндоскоп был соединен с камерой и воспринимал изображение.
Из истории: «Прародителем» внутриротовых сканеров является французская система Duret. Информацию получали непосредственно во рту с помощью лазерного источника света и 2 эндоскопов. Лазерный диод, который через эндоскоп проецировал свет на зону обзора. Второй эндоскоп был соединен с камерой и воспринимал изображение.
 Технология 3 D в движении. Представлен компнией 3 M") Сканер Lava (C. O. S) Технология 3 D в движении. Представлен компнией 3 M ESPE в 2008 г. Регистрирующая головка камеры содержит 192 светодиода (LED) и оптическую систему из 22 линз. Оптическая схема, алгоритмы изображений позволяет в реальном времени получать до 20 снимков в секунду( одновременное построение 20 фрагментов поверхности, которые автоматически «склеиваются» в единую поверхность.
Сканер Lava (C. O. S) Технология 3 D в движении. Представлен компнией 3 M ESPE в 2008 г. Регистрирующая головка камеры содержит 192 светодиода (LED) и оптическую систему из 22 линз. Оптическая схема, алгоритмы изображений позволяет в реальном времени получать до 20 снимков в секунду( одновременное построение 20 фрагментов поверхности, которые автоматически «склеиваются» в единую поверхность.
 Камера весит 390 г, размер измерительной головки имеет ширину 13, 2 мм Для отображения полного зубного ряда требуется 2400 фрагментов 3 D данных(2400 снимков) Прикус фиксируют путем оптической регистрации смыкания зубных рядов (получение 3 D данных вестибулярных поверхностей верхних и нижних зубов с последующим автоматическим совмещением моделей)
Камера весит 390 г, размер измерительной головки имеет ширину 13, 2 мм Для отображения полного зубного ряда требуется 2400 фрагментов 3 D данных(2400 снимков) Прикус фиксируют путем оптической регистрации смыкания зубных рядов (получение 3 D данных вестибулярных поверхностей верхних и нижних зубов с последующим автоматическим совмещением моделей)
 Blueline 3 D 1 60 снимков в секунду Фокусное расстояние 0, 5 -3, 5 см Получение от 50000 до 200000 фрагментов Верхняя и нижняя челюсти сканируются раздельно и в прикусе • Контроль качества проводится по экрану «дырки» и ошибки сканирования устраняются немедленно дополнительными кадрами съемки • •
Blueline 3 D 1 60 снимков в секунду Фокусное расстояние 0, 5 -3, 5 см Получение от 50000 до 200000 фрагментов Верхняя и нижняя челюсти сканируются раздельно и в прикусе • Контроль качества проводится по экрану «дырки» и ошибки сканирования устраняются немедленно дополнительными кадрами съемки • •
 Hint. Els • Камера длиной 30 см, высотой 7 см, ширина рабочей части 1, 5 см • Время сканирования 200 миллисекунд • Область сканирования 20 х15 мм • На сканирование одного зуба требуется около 8 снимков
Hint. Els • Камера длиной 30 см, высотой 7 см, ширина рабочей части 1, 5 см • Время сканирования 200 миллисекунд • Область сканирования 20 х15 мм • На сканирование одного зуба требуется около 8 снимков
 Cerec Bluecam • Камера с синими светодиодами (она дает точность сканирования, избавило от необходимости покрывать зубы специальной пудрой) • Синий цвет хорошо отражается от полупрозрачных тканей зуба • При сканировании используется метод триангуляции • Антагонисты определяются сканированием регистратов прикуса
Cerec Bluecam • Камера с синими светодиодами (она дает точность сканирования, избавило от необходимости покрывать зубы специальной пудрой) • Синий цвет хорошо отражается от полупрозрачных тканей зуба • При сканировании используется метод триангуляции • Антагонисты определяются сканированием регистратов прикуса
 Преимущества внутриротового сканирования: • На точность внутриротового сканирования не влияют движения головы пациента • Исключается возможность испачкать пациента оттискным материалом • Отсутствие неприятных ощущений, связанных с традиционной техникой получения оттиска • Нет необходимости в получении диагностических моделей для контроля качества препарирования и оценки степени окклюзионного разобщения.
Преимущества внутриротового сканирования: • На точность внутриротового сканирования не влияют движения головы пациента • Исключается возможность испачкать пациента оттискным материалом • Отсутствие неприятных ощущений, связанных с традиционной техникой получения оттиска • Нет необходимости в получении диагностических моделей для контроля качества препарирования и оценки степени окклюзионного разобщения.
 Этапы получения виртуального оттиска: • Предварительная ретракция десны техникой двойных нитей. Вначале в бороздке размещают самую тонкую ретракционную нить (000) • Получение оптического слепка для контроля качества препарирования (если нужно, проводят коррекцию препарирования)
Этапы получения виртуального оттиска: • Предварительная ретракция десны техникой двойных нитей. Вначале в бороздке размещают самую тонкую ретракционную нить (000) • Получение оптического слепка для контроля качества препарирования (если нужно, проводят коррекцию препарирования)
 • Затем в бороздку на 5 минут укладывают более толстую нить • Нити удаляют и получают оттиск границы препарирования • Точность получаемой виртуальной модели определяется точностью склеивания , которая в свою очередь определяется точность сканирования фрагментов
• Затем в бороздку на 5 минут укладывают более толстую нить • Нити удаляют и получают оттиск границы препарирования • Точность получаемой виртуальной модели определяется точностью склеивания , которая в свою очередь определяется точность сканирования фрагментов
 Недостатки внутриротового сканирования: • Большие габариты и вес регистрирующих камер • Достаточно высокая их цена
Недостатки внутриротового сканирования: • Большие габариты и вес регистрирующих камер • Достаточно высокая их цена