

Л_10_Случайные воздействия в линейных САУ.ppt
- Количество слайдов: 22
 Случайные воздействия в линейных САУ 1. Понятия и основные характеристики случайной функции. 2. Спектральная плотность стационарной случайной функции. 3. Преобразование стационарной случайной функции стационарной линейной динамической системой. 4. Статистическая проверка гипотез.
Случайные воздействия в линейных САУ 1. Понятия и основные характеристики случайной функции. 2. Спектральная плотность стационарной случайной функции. 3. Преобразование стационарной случайной функции стационарной линейной динамической системой. 4. Статистическая проверка гипотез.
 Случайные процессы в системах автоматического регулирования определяются вероятность появления той или иной формы воздействия в тот или иной момент времени. Величина реального задающего или возмущающего воздействия такова, что в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно иди с любым сдвигом во времени и т. п. . До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д. ).
Случайные процессы в системах автоматического регулирования определяются вероятность появления той или иной формы воздействия в тот или иной момент времени. Величина реального задающего или возмущающего воздействия такова, что в каждый момент времени и процесс его изменения с течением времени зависят от множества разнообразных величин, которые случайным образом могут комбинироваться друг с другом, появляться одновременно иди с любым сдвигом во времени и т. п. . До сих пор поведение систем автоматического регулирования исследовалось при определенных, заданных во времени задающих и возмущающих воздействиях (ступенчатая функция, импульсная функция, гармоническое воздействие и т. д. ).
 Вероятностные характеристики дискретных случайных величин. Чтобы полностью знать дискретную случайную величину надо иметь следующие данные: а) все возможные значения, которые она может принимать при данных условиях задачи или опыта; б) вероятность появления каждого из этих значений. Графически этот закон распределения представляет собой равновероятное распределение в некотором интервале. Примером закона распределения дискретно случайной величины является часто используемый закон Пуассона. Он применим к дискретным случайным величинам, которые теоретически могут принимать все положительные значения от 0 до оо. Примерами таких величин могут служить число пассажиров автобуса, число вызовов на телефонной станции в течение какого-либо определенного отрезка времени, число электронов, попадающих на анод электронной лампы за определенный промежуток времени, и т. п. Одной из таких характеристик является среднее значение, или математическое ожидание, случайной величины. Часто используется так называемое среднеквадратичное значение случайной величины, представляющее собой корень квадратный из среднего квадрата случайной величины.
Вероятностные характеристики дискретных случайных величин. Чтобы полностью знать дискретную случайную величину надо иметь следующие данные: а) все возможные значения, которые она может принимать при данных условиях задачи или опыта; б) вероятность появления каждого из этих значений. Графически этот закон распределения представляет собой равновероятное распределение в некотором интервале. Примером закона распределения дискретно случайной величины является часто используемый закон Пуассона. Он применим к дискретным случайным величинам, которые теоретически могут принимать все положительные значения от 0 до оо. Примерами таких величин могут служить число пассажиров автобуса, число вызовов на телефонной станции в течение какого-либо определенного отрезка времени, число электронов, попадающих на анод электронной лампы за определенный промежуток времени, и т. п. Одной из таких характеристик является среднее значение, или математическое ожидание, случайной величины. Часто используется так называемое среднеквадратичное значение случайной величины, представляющее собой корень квадратный из среднего квадрата случайной величины.
 абсолютной величины отклонения. Дисперсией называется средний") Средним отклонением D называется среднее значение (математическое ожидание) абсолютной величины отклонения. Дисперсией называется средний квадрат отклонения случайной величины от ее среднего значения. Она совпадает с центральным моментом второго порядка. Вероятностные характеристики непрерывных случайных величин. Непрерывная случайная величина может принимать все значения в каком-либо заданном ограниченном интервале (а < х < b) или все значения от —оо до +оо. Следовательно, функция распределения для непрерывной случайной величины будет изображаться непрерывной кривой. Вероятность того, что непрерывная случайная величина примет определенное числовое значение х, бесконечно мала (например, вероятность попадания центра тяжести снаряда в определенную точку цели). Вероятность же того, что непрерывная случайная величина окажется в некотором промежутке х1<х<х1 будет иметь конечное значение.
Средним отклонением D называется среднее значение (математическое ожидание) абсолютной величины отклонения. Дисперсией называется средний квадрат отклонения случайной величины от ее среднего значения. Она совпадает с центральным моментом второго порядка. Вероятностные характеристики непрерывных случайных величин. Непрерывная случайная величина может принимать все значения в каком-либо заданном ограниченном интервале (а < х < b) или все значения от —оо до +оо. Следовательно, функция распределения для непрерывной случайной величины будет изображаться непрерывной кривой. Вероятность того, что непрерывная случайная величина примет определенное числовое значение х, бесконечно мала (например, вероятность попадания центра тяжести снаряда в определенную точку цели). Вероятность же того, что непрерывная случайная величина окажется в некотором промежутке х1<х<х1 будет иметь конечное значение.
 Случайная величина х, изменяющаяся во времени называется случайным или стохастическим процессом. Случайный процесс не есть определенная кривая х (t), а является множеством возможных кривых х {1), так же как случайная величина не имеет определенного значения, а является совокупностью (множеством) возможных значений. Можно еще сказать, что случайный процесс есть такая функция времени, значение которой в каждый момент времени является случайной величиной.
Случайная величина х, изменяющаяся во времени называется случайным или стохастическим процессом. Случайный процесс не есть определенная кривая х (t), а является множеством возможных кривых х {1), так же как случайная величина не имеет определенного значения, а является совокупностью (множеством) возможных значений. Можно еще сказать, что случайный процесс есть такая функция времени, значение которой в каждый момент времени является случайной величиной.
 Для характеристики полезных входных сигналов систем регулирования и следящих систем соотношения практически не могут применяться, так как для этих сигналов ход процесса в последующие моменты времени в какой-то степени зависит от того, что было в предыдущие моменты времени. Чем более инерционен изучаемый объект, тем больше эта взаимозависимость, или корреляция. Начальный корреляционный, момент двух значений случайной функции х(t) и х(t 1), взятых в моменты времент t и t 1, носит название корреляционной (автокорреляционной) функции. Иногда под корреляционной функцией понимают центральный корреляционный момент x(t) и x(t 1). Корреляционная функция является весьма универсальной характеристикой для случайного процесса. Она определяет зависимость случайной величины в последующий момент времени x(t 1) от предшествующего значения х (t) в момент времени t.
Для характеристики полезных входных сигналов систем регулирования и следящих систем соотношения практически не могут применяться, так как для этих сигналов ход процесса в последующие моменты времени в какой-то степени зависит от того, что было в предыдущие моменты времени. Чем более инерционен изучаемый объект, тем больше эта взаимозависимость, или корреляция. Начальный корреляционный, момент двух значений случайной функции х(t) и х(t 1), взятых в моменты времент t и t 1, носит название корреляционной (автокорреляционной) функции. Иногда под корреляционной функцией понимают центральный корреляционный момент x(t) и x(t 1). Корреляционная функция является весьма универсальной характеристикой для случайного процесса. Она определяет зависимость случайной величины в последующий момент времени x(t 1) от предшествующего значения х (t) в момент времени t.
 Основные свойства корреляционных функций. 1. Симметрия 2. Дисперсию - при t 1=t корреляционная функция дает средний квадрат случайной величины, a R 0(t, t 1). 3. Прибавление к случайным величинам произвольных неслучайных величин не меняет их корреляционных моментов и дисперсии. Поэтому корреляционная функция R 0 (t, t 1) не изменится, если к случайной функции добавить произвольную неслучайную функцию. Это свойство не относится к функции R (t, t 1), так как добавление неслучайных величин к случайным изменяет начальные моменты. В этом случае корреляционная функция будет равна сумме корреляционных функций случайной и неслучайной функций. Если на автоматическую систему действуют одновременно полезный сигнал и помеха, то возникает задача оптимального расчета системы с тем, чтобы получить наименьшую результирующую ошибку. С точки зрения наилучшего воспроизведения полезного сигнала система должна иметь возможно большую полосу пропускания, а с точки зрения наилучшего подавления помехи система, наоборот, должна иметь возможно меньшую полосу пропускания. Критерием получения оптимального решения здесь будет минимальное значение результирующей ошибки системы, определяемой полезным сигналом и помехой.
Основные свойства корреляционных функций. 1. Симметрия 2. Дисперсию - при t 1=t корреляционная функция дает средний квадрат случайной величины, a R 0(t, t 1). 3. Прибавление к случайным величинам произвольных неслучайных величин не меняет их корреляционных моментов и дисперсии. Поэтому корреляционная функция R 0 (t, t 1) не изменится, если к случайной функции добавить произвольную неслучайную функцию. Это свойство не относится к функции R (t, t 1), так как добавление неслучайных величин к случайным изменяет начальные моменты. В этом случае корреляционная функция будет равна сумме корреляционных функций случайной и неслучайной функций. Если на автоматическую систему действуют одновременно полезный сигнал и помеха, то возникает задача оптимального расчета системы с тем, чтобы получить наименьшую результирующую ошибку. С точки зрения наилучшего воспроизведения полезного сигнала система должна иметь возможно большую полосу пропускания, а с точки зрения наилучшего подавления помехи система, наоборот, должна иметь возможно меньшую полосу пропускания. Критерием получения оптимального решения здесь будет минимальное значение результирующей ошибки системы, определяемой полезным сигналом и помехой.
 Процесс управления автомобилем включает в себя трогание, ускорение, стабилизацию скорости и траектории движения, маневрирование, торможение и остановку. Водитель регулирует необходимое для движения усилие, скорость и направление. Возмущающие воздействия, определяемые внешней средой, и множество вариантов сочетаний скорости, силы и направлений усложняют управление автомобилем. При управлении движением (вождении) транспортного средства приходится решать следующие задачи: управление скоростью на тяговых режимах; управление скоростью на тормозных режимах; управление направлением движения; управление плавностью хода.
Процесс управления автомобилем включает в себя трогание, ускорение, стабилизацию скорости и траектории движения, маневрирование, торможение и остановку. Водитель регулирует необходимое для движения усилие, скорость и направление. Возмущающие воздействия, определяемые внешней средой, и множество вариантов сочетаний скорости, силы и направлений усложняют управление автомобилем. При управлении движением (вождении) транспортного средства приходится решать следующие задачи: управление скоростью на тяговых режимах; управление скоростью на тормозных режимах; управление направлением движения; управление плавностью хода.
 Основным источником энергии является двигатель. Его механическая энергия преобразуется в другие виды непосредственно или через промежуточное преобразование в электрическую энергию. Потребители тепловой энергии могут утилизировать тепло двигателя или иметь независимый источник. Основными параметрами источников энергии являются напряжение, давление, температура и мощность (производительность). Для успешного использования дополнительных источников требуется стабилизация их выходных параметров, а это можно обеспечить только путем применения автоматических регуляторов. Это регуляторы напряжения, давления, температуры и т. д.
Основным источником энергии является двигатель. Его механическая энергия преобразуется в другие виды непосредственно или через промежуточное преобразование в электрическую энергию. Потребители тепловой энергии могут утилизировать тепло двигателя или иметь независимый источник. Основными параметрами источников энергии являются напряжение, давление, температура и мощность (производительность). Для успешного использования дополнительных источников требуется стабилизация их выходных параметров, а это можно обеспечить только путем применения автоматических регуляторов. Это регуляторы напряжения, давления, температуры и т. д.
 В настоящее время на АТС используются различные системы автоматического регулирования и управления. К ним относятся системы стабилизации скорости и траектории движения АТС, программные и следящие системы регулирования торможением (противобуксовочные и антиблокировочные системы), системы регулирования подвески (плавностью хода) и системы регулирования просвета (высоты кузова над дорогой).
В настоящее время на АТС используются различные системы автоматического регулирования и управления. К ним относятся системы стабилизации скорости и траектории движения АТС, программные и следящие системы регулирования торможением (противобуксовочные и антиблокировочные системы), системы регулирования подвески (плавностью хода) и системы регулирования просвета (высоты кузова над дорогой).
 Антиблокировочные системы Блокирование колес при торможении и разгоне нежелательно по следующим причинам: нарушается устойчивость автомобиля или автопоезда при торможении и буксовании; частое блокирование колес и, следовательно, движение автомобиля «юзом» приводит к прогрессирующему изнашиванию шин и снижению срока их службы; снижается эффективность торможения.
Антиблокировочные системы Блокирование колес при торможении и разгоне нежелательно по следующим причинам: нарушается устойчивость автомобиля или автопоезда при торможении и буксовании; частое блокирование колес и, следовательно, движение автомобиля «юзом» приводит к прогрессирующему изнашиванию шин и снижению срока их службы; снижается эффективность торможения.
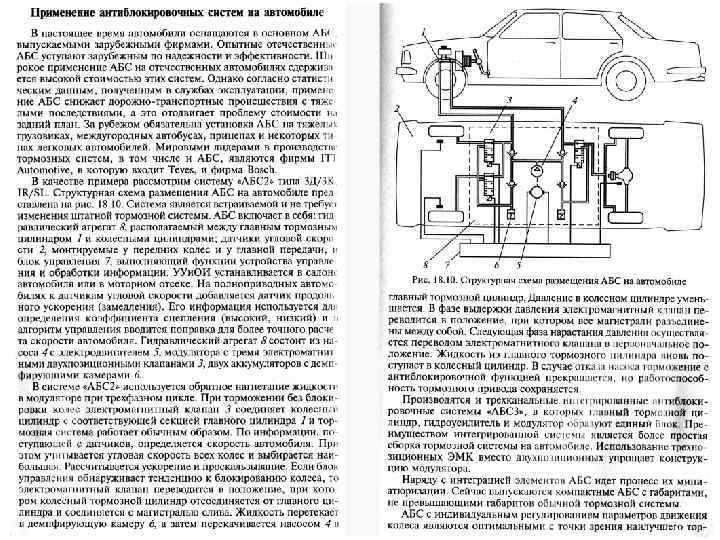
 Для того чтобы АБС обеспечивала надежное тормозное управление, алгоритм ее работы должен учитывать не менее пяти параметров: угловую скорость и ускорение (замедление) колеса, начальную скорость автомобиля при торможении, нормальную реакцию на колесо, коэффициент сцеплении колеса с дорогой.
Для того чтобы АБС обеспечивала надежное тормозное управление, алгоритм ее работы должен учитывать не менее пяти параметров: угловую скорость и ускорение (замедление) колеса, начальную скорость автомобиля при торможении, нормальную реакцию на колесо, коэффициент сцеплении колеса с дорогой.
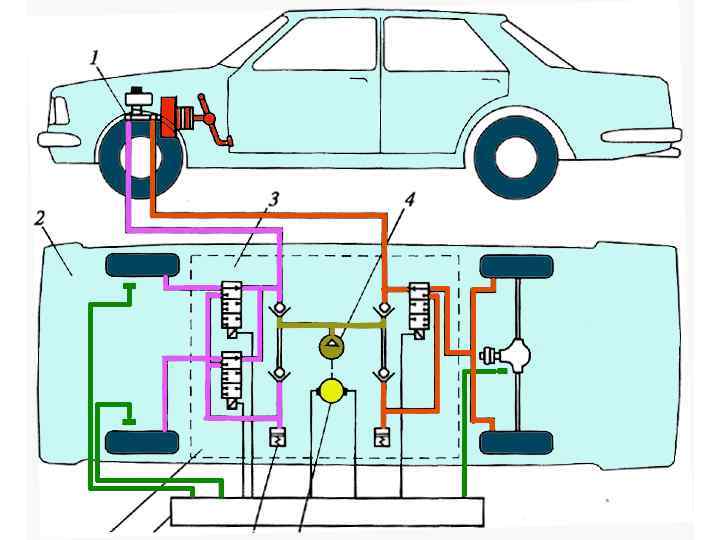
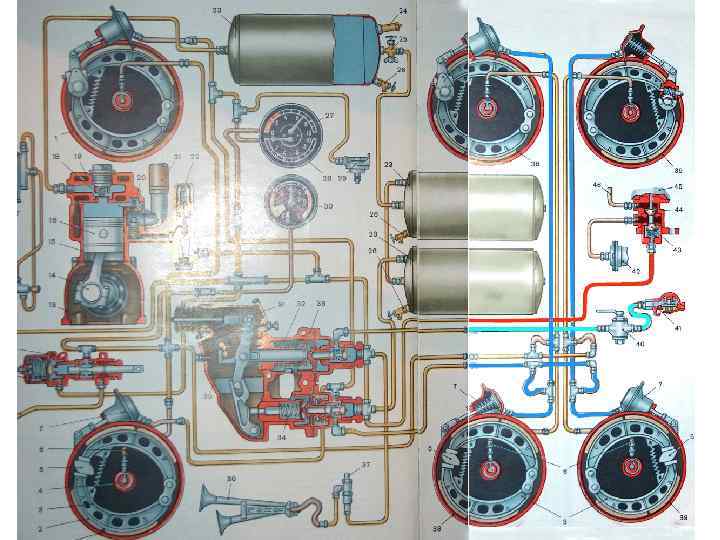
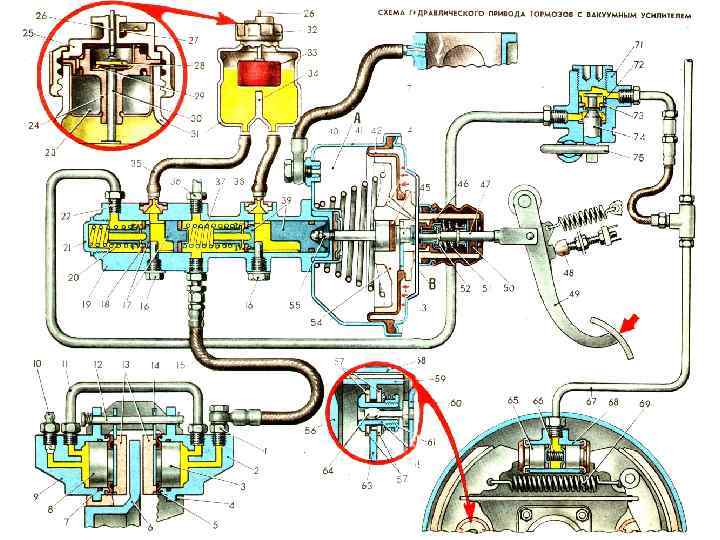
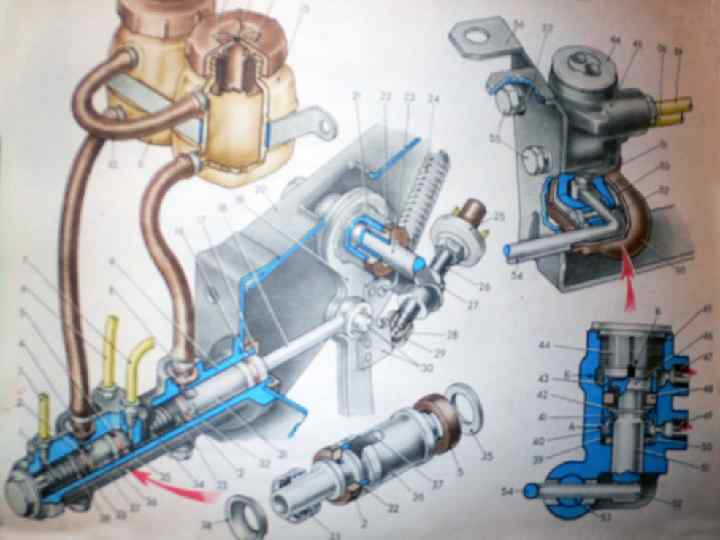
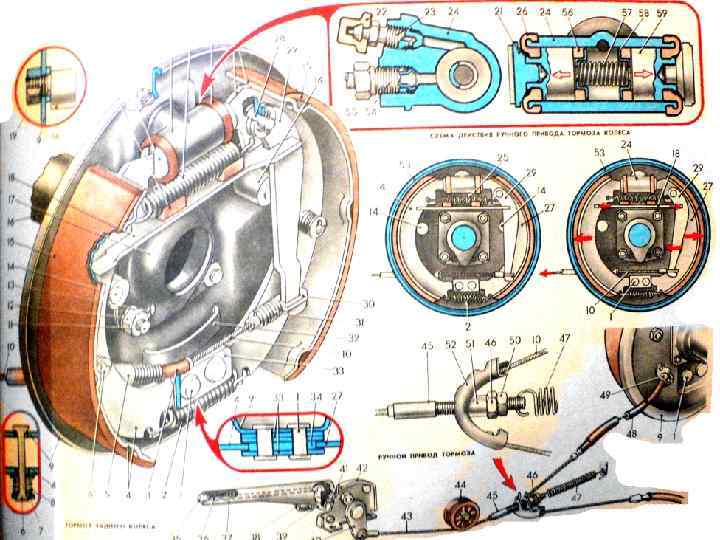
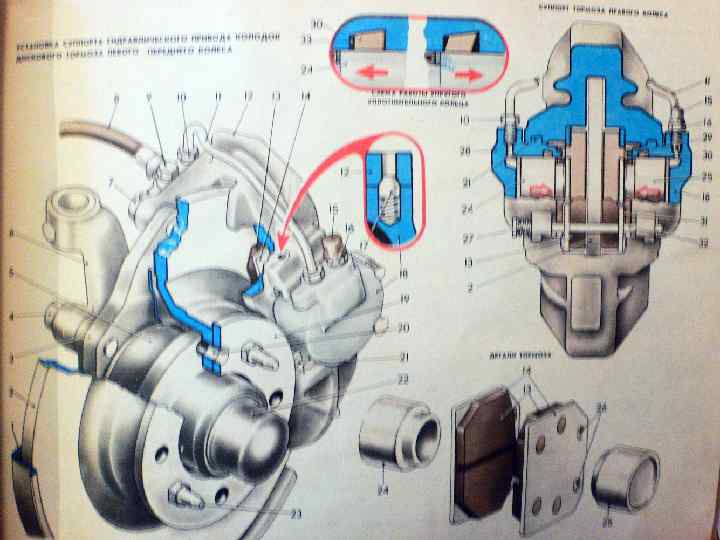
 Принципиальная схема АБС с гидравлическим приводом тормозных механизмов
Принципиальная схема АБС с гидравлическим приводом тормозных механизмов
 Модуляторы АБС могут иметь клапанное, золотниковое, диафрагменное и смешанное устройство. Они изменяют давление в тормозных цилиндрах по командам, получаемым от устройства управления.
Модуляторы АБС могут иметь клапанное, золотниковое, диафрагменное и смешанное устройство. Они изменяют давление в тормозных цилиндрах по командам, получаемым от устройства управления.
