Структура современного робота.ppt
- Количество слайдов: 34



СКБ «Компьютерное зрение в научных и прикладных задачах» Открытая лекция «Строение современных роботов» И ЭТО ВСЁ Я!?

ASIMO Технические характеристики: Скорость бега по прямой: 6 км/ч; (Advanced Step Скорость бега по кругу радиусом 2. 5 м: 5 км/ч; in Innovative Mobility) Скорость спокойной ходьбы: 2. 7 км/ч; Скорость ходьбы с грузом до 1 кг: 1. 6 км/ч; Визуальная информация: видеокамера с высоким динамическим разрешением; лазерный датчик слежения за плоскостью и обнаружения препятствий на земле; Звуковая информация: аудиосистема, микрофоны, динамик; «Вестибулярный аппарат» : датчик ускорения, угловой датчик, шестиосевой датчик давления на стопах, гироскоп; «Осязание» на верхних конечностях: 6 осевые датчики давления на запястьях: Запас энергии: от 25 до 60 минут Рост: 130 см; Вес: 54 кг.
![Бернштейн Николай Александрович • Никола й Алекса ндрович Бернште йн (24 октября [5 ноября]](https://present5.com/presentation/3/-51662275_170627396.pdf-img/-51662275_170627396.pdf-3.jpg "Бернштейн Николай Александрович • Никола й Алекса ндрович Бернште йн (24 октября [5 ноября]")
Бернштейн Николай Александрович • Никола й Алекса ндрович Бернште йн (24 октября [5 ноября] 1896, Москва — 16 января 1966, там же) — советский психофизиолог и физиолог, создатель нового направления исследований — физиологии активности.

Kenshiro робот, конструкция которого максимально скопирована со строения тела человека.

Содержание • • Классификация роботов Функциональная и структурная схема Структура привода промышленного робота Классификация приводов Классификация электродвигателей Информационные системы роботов Манипуляционные системы ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ

Промышленные роботы Автоматическая машина состоящая из испол нительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления.

Классификация роботов
; универсальные. По")
Промышленные роботы классифицируют По характеру выполняемых операций: • технологические; вспомогательные (подъемно транспортные); универсальные. По степени специализации: • специальные; специализированные (целевые); многоцелевые. По области применения и виду производства. По виду систем координат, в которых они работают: прямоугольная (плоская и пространственная); полярная (плоская, цилиндрическая и сферическая); ангулярная или уг ловая (плоская, цилиндрическая и сферическая). По числу степеней подвижности: с одной, двумя, тре мя, четырьмя степенями подвижности и со степенями подвиж ности более четырех. По грузоподъемности: сверхлегкие грузоподъемность до 1 кг; легкие свыше 1 до 10 кг; средние свыше 10 до 200 кг; тяжелые свыше 200 до 1000 кг; сверхтяжелые свыше 1000 кг.
: стационарные и по движные. По типу силового привода: электромеханические, пневматические, гидравлические,")
По мобильности (подвижности): стационарные и по движные. По типу силового привода: электромеханические, пневматические, гидравлические, комбинированные. По количеству манипуляторов По быстродействию: малое линейные скорости по отдельным степеням подвижности до 0, 5 м/с; среднее линей ные скорости свыше 0, 5 до 1 м/с; высокое линейные скорости свыше 1 м/с; По точности позиционирования: малая погреш ность позиционирования до 1 мм и выше; средняя погреш ность позиционирования от 0, 1 до 1 мм; высокая погрешность позиционирования менее 0, 1 мм. По характеру отработки программы: жесткопрограммируемые; адаптивные ; гибкопрограммируемые.

Функциональная схема робота

Структурная схема робота

Общая структура привода промышленного робота

Классификация приводов

Классификация электродвигателей

Информационные системы роботов Разделяют по функциональному признаку на две группы: • датчики состояния манипулятора (датчики положения, скорости, крутящего момента) • системы очувствления (сенсорные устройства).

Классификация сенсорных устройств

Схема системы технического зрения

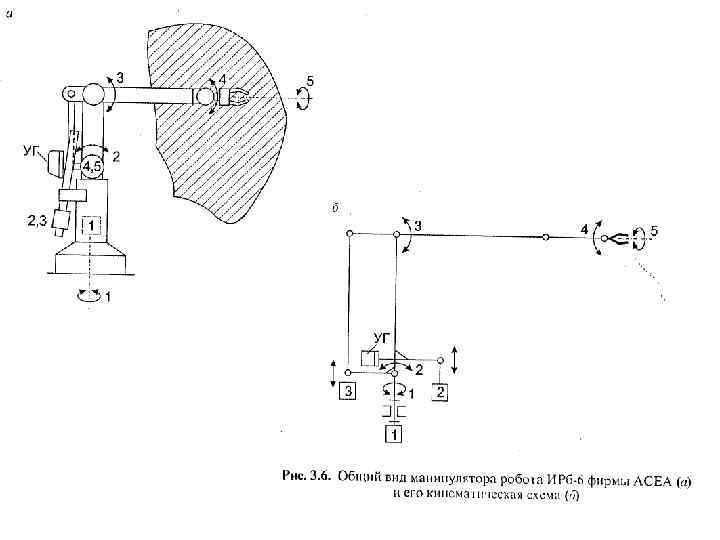
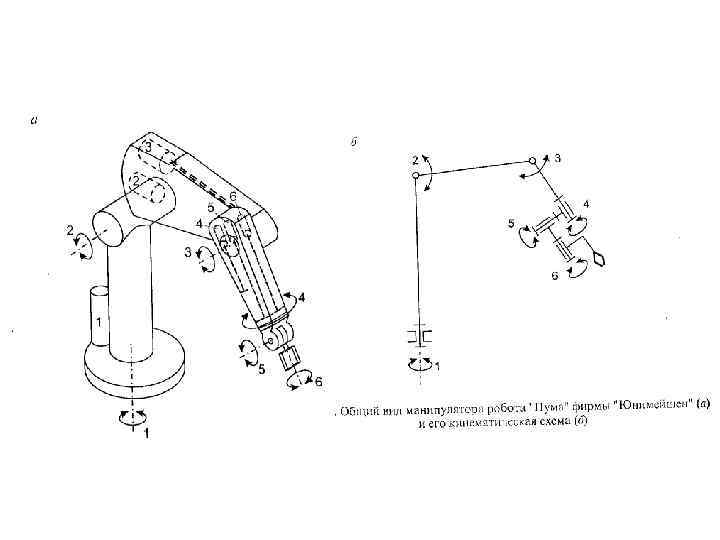
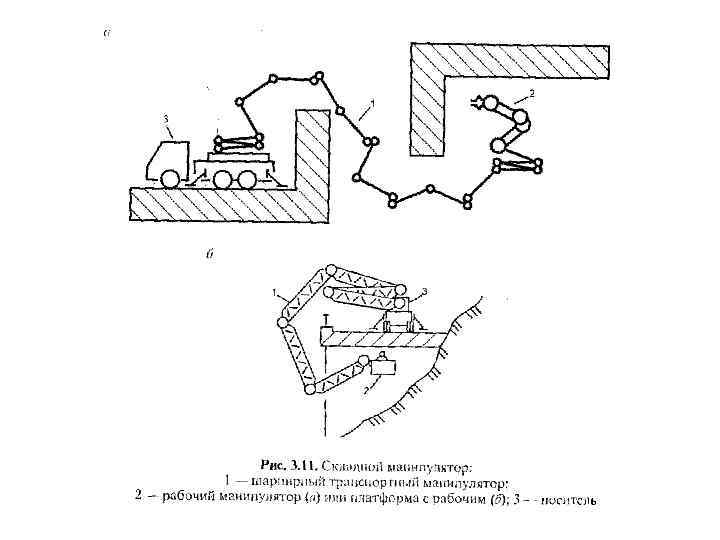
Манипуляционные системы

Манипуляционные системы

Манипуляционные системы

Манипуляционные системы
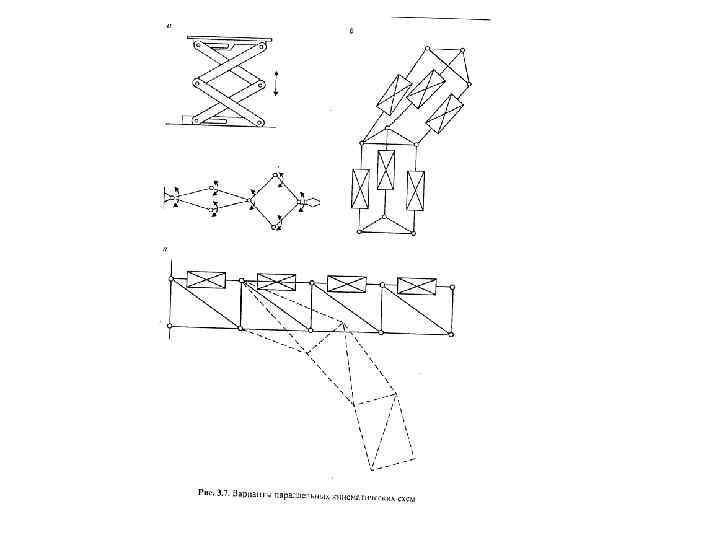

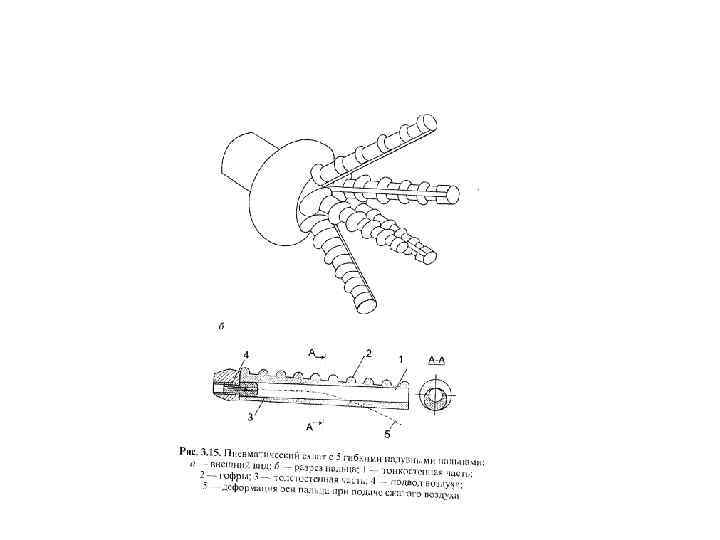
Кинематические устройства с управляемой деформацией

Рабочие органы манипуляторов

ПРОСТЕЙШИЙ РОБОТ НА ОДНОЙ МИКРОСХЕМЕ

Направленное движение к свету или от света

Сделать поведение робота более живым

Какого робота сделать?

Ссылки • http: //myrobot. ru

Нормативные документы и материалы по терминологии в робототехнике • ГОСТ 25686 85 "Манипуляторы, автооператоры и промыш ленные роботы. Термины и определения", • Cтандарт СЭВ 5948 87 "Роботы промышленные. Термины и определения", • Техниче ский тчет международной о организации стандартизации ИСО 8379 "Манипуляционные промышленные роботы.
Структура современного робота.ppt