

СИСТЕМЫ КООРДИНАТ ТЕЛА ЧЕЛОВЕКА.pptx
- Количество слайдов: 59
 СИСТЕМЫ КООРДИНАТ ТЕЛА ЧЕЛОВЕКА. АНАЛИЗ ПОЛОЖЕНИЯ И ДВИЖЕНИЙ ТЕЛА И ЕГО СЕГМЕНТОВ к. б. н. , доцент кафедры физиологии и биохимии человека и животных Улитин И. Б.
СИСТЕМЫ КООРДИНАТ ТЕЛА ЧЕЛОВЕКА. АНАЛИЗ ПОЛОЖЕНИЯ И ДВИЖЕНИЙ ТЕЛА И ЕГО СЕГМЕНТОВ к. б. н. , доцент кафедры физиологии и биохимии человека и животных Улитин И. Б.
 Системы координат тела человека
Системы координат тела человека
 Положение тела человека в пространстве описывается его местом, ориентацией и позой. • Место – это часть пространства, в которой находится тело. • Ориентация тела – это его поворот относительно неподвижной системы. • Поза – характеризует взаимное расположение звеньев тела относительно друга.
Положение тела человека в пространстве описывается его местом, ориентацией и позой. • Место – это часть пространства, в которой находится тело. • Ориентация тела – это его поворот относительно неподвижной системы. • Поза – характеризует взаимное расположение звеньев тела относительно друга.
 Осевая система координат тела человека • Имеется три взаимно перпендикулярные оси: o вертикальная o фронтальная o сагиттальная, которые образуют осевую систему координат, лежащую в основе координационного метода анализа положения и движений тела.
Осевая система координат тела человека • Имеется три взаимно перпендикулярные оси: o вертикальная o фронтальная o сагиттальная, которые образуют осевую систему координат, лежащую в основе координационного метода анализа положения и движений тела.
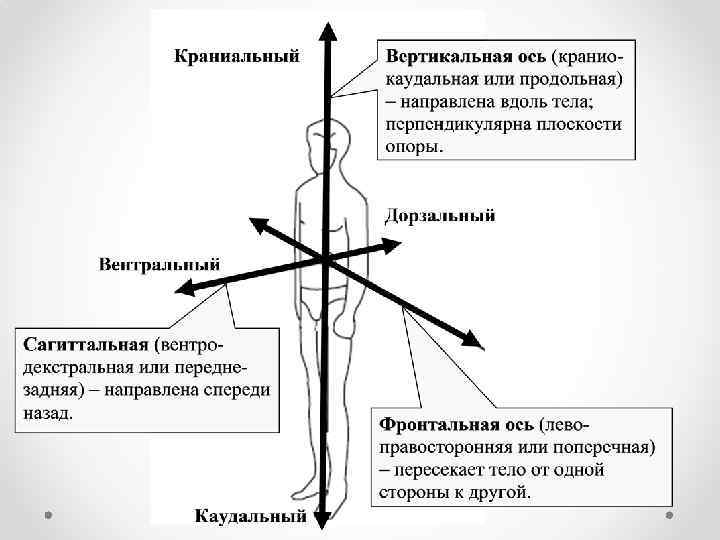
 Положение частей тела по отношению к основным осям и плоскостям обозначается специальными терминами: • Медиальный (серединный) расположенный ближе к срединной оси. • Латеральный (боковой) расположенный дальше от срединной оси. • Краниальный (черепной) расположенный в направлении головы. • Каудальный (хвостовой) расположенный в направлении от головы. • Дорзальный (спинной) расположенный в направлении спины. • Вентральный (брюшной) - расположенный в направлении живота.
Положение частей тела по отношению к основным осям и плоскостям обозначается специальными терминами: • Медиальный (серединный) расположенный ближе к срединной оси. • Латеральный (боковой) расположенный дальше от срединной оси. • Краниальный (черепной) расположенный в направлении головы. • Каудальный (хвостовой) расположенный в направлении от головы. • Дорзальный (спинной) расположенный в направлении спины. • Вентральный (брюшной) - расположенный в направлении живота.
 Применительно к конечностям пользуются терминами: • Проксимальный лежащий ближе к туловищу или началу органа. • Дистальный расположенный дальше от туловища или начала органа.
Применительно к конечностям пользуются терминами: • Проксимальный лежащий ближе к туловищу или началу органа. • Дистальный расположенный дальше от туловища или начала органа.
 и левая (sinister) стороны обозначаются не с точки зрения наблюдателя,") • Правая (dexter) и левая (sinister) стороны обозначаются не с точки зрения наблюдателя, а наблюдаемого. • Термин гомолатеральный (ипсилатеральный) обозначает расположение на той же стороне, а контрлатеральный расположенный на противоположной стороне. Билатерально расположение по обе стороны.
• Правая (dexter) и левая (sinister) стороны обозначаются не с точки зрения наблюдателя, а наблюдаемого. • Термин гомолатеральный (ипсилатеральный) обозначает расположение на той же стороне, а контрлатеральный расположенный на противоположной стороне. Билатерально расположение по обе стороны.
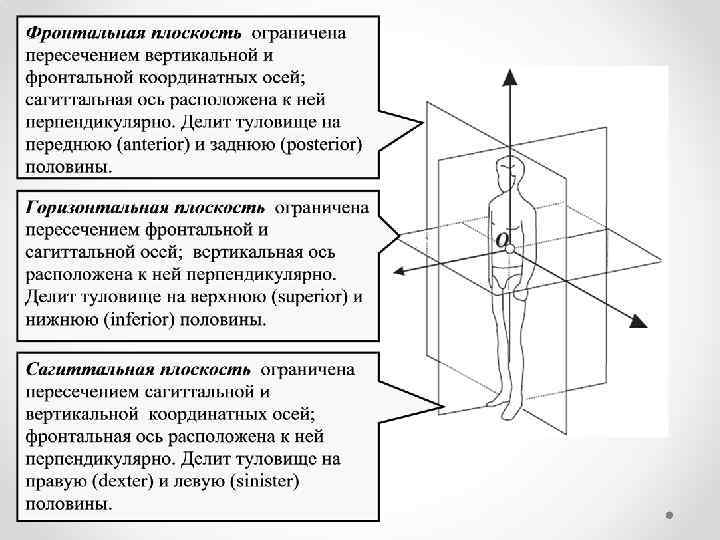
 Плоскостная система координат тела • Три взаимно перпендикулярные плоскости: o сагиттальная o фронтальная o горизонтальная образуют плоскостную систему координат. Каждая плоскость ограничена двумя координатными осями, третья ось пронизывает ее под прямым углом.
Плоскостная система координат тела • Три взаимно перпендикулярные плоскости: o сагиттальная o фронтальная o горизонтальная образуют плоскостную систему координат. Каждая плоскость ограничена двумя координатными осями, третья ось пронизывает ее под прямым углом.
 Координационноплоскостной метод • Используется для оценки проекционной деформации тела, совершающего движение вдоль и/или вокруг оси при его проекции последовательно на различные плоскости. • Особенно актуален при анализе причины деформации костных структур на рентгенограммах, компьютерных томограммах, фотографиях и при визуальной диагностике статики и динамики пациентов.
Координационноплоскостной метод • Используется для оценки проекционной деформации тела, совершающего движение вдоль и/или вокруг оси при его проекции последовательно на различные плоскости. • Особенно актуален при анализе причины деформации костных структур на рентгенограммах, компьютерных томограммах, фотографиях и при визуальной диагностике статики и динамики пациентов.
 Виды движений тела и его частей относительно системы осевых и плоскостных координат
Виды движений тела и его частей относительно системы осевых и плоскостных координат
 Виды движений вокруг 3 -х осей Вокруг каждой из 3 х осей осевой системы координат возможно 3 вида движений: • смещение (поступательное движение) • вращение (угловое движение) • комбинация смещения и вращения (спиралевидное движение)
Виды движений вокруг 3 -х осей Вокруг каждой из 3 х осей осевой системы координат возможно 3 вида движений: • смещение (поступательное движение) • вращение (угловое движение) • комбинация смещения и вращения (спиралевидное движение)
 Виды движений тела и его частей относительно системы осевых координат Cr = краниальный, Cd = каудальный, V = вентральный, D = дарзальный, Ld = правый, Ls = левый.
Виды движений тела и его частей относительно системы осевых координат Cr = краниальный, Cd = каудальный, V = вентральный, D = дарзальный, Ld = правый, Ls = левый.
 Виды движений в 3 -х плоскостях В любой из 3 х плоскостей происходят линейные перемещения вдоль осей лежащих в этой плоскости и вращение вокруг оси, которая перпендикулярна этой плоскости.
Виды движений в 3 -х плоскостях В любой из 3 х плоскостей происходят линейные перемещения вдоль осей лежащих в этой плоскости и вращение вокруг оси, которая перпендикулярна этой плоскости.
 Виды движений в 3 -х плоскостях Движения в сагиттальной плоскости: • Линейные смещения вдоль вертикальной или сагиттальной осей. • Угловые движения вокруг фронтальной оси (флексия и экстензия).
Виды движений в 3 -х плоскостях Движения в сагиттальной плоскости: • Линейные смещения вдоль вертикальной или сагиттальной осей. • Угловые движения вокруг фронтальной оси (флексия и экстензия).
 Виды движений в 3 -х плоскостях Движения во фронтальной плоскости: • Линейные смещения вдоль вертикальной или фронтальной осей. • Угловые движение вокруг сагиттальной оси (латерофлексия вправо и влево).
Виды движений в 3 -х плоскостях Движения во фронтальной плоскости: • Линейные смещения вдоль вертикальной или фронтальной осей. • Угловые движение вокруг сагиттальной оси (латерофлексия вправо и влево).
 Виды движений в 3 -х плоскостях Движения в горизонтальной плоскости: • Линейные смещения вдоль фронтальной или сагиттальной осей. • Вращение вокруг вертикальной оси (ротация).
Виды движений в 3 -х плоскостях Движения в горизонтальной плоскости: • Линейные смещения вдоль фронтальной или сагиттальной осей. • Вращение вокруг вертикальной оси (ротация).
 Остео- и артрокинематические движения
Остео- и артрокинематические движения
 Все перемещения звеньев ОДА и тела в целом являются следствием движения суставных поверхностей. Термин артро-кинематические движения используется для описания специфических движений суставных поверхностей друг относительно друга, а остео-кинематические движения описывают как сочленяющиеся звенья движутся в суставе (например, сгибание голени относительно бедра в коленном суставе)
Все перемещения звеньев ОДА и тела в целом являются следствием движения суставных поверхностей. Термин артро-кинематические движения используется для описания специфических движений суставных поверхностей друг относительно друга, а остео-кинематические движения описывают как сочленяющиеся звенья движутся в суставе (например, сгибание голени относительно бедра в коленном суставе)
 Примеры остео-кинематических и артро-кинематических движений
Примеры остео-кинематических и артро-кинематических движений
 Типы артро-кинематических движений Характер движения в суставах обусловливается формой суставных поверхностей. Различают следующие виды движений суставных поверхностей: • ВРАЩЕНИЕ • СКОЛЬЖЕНИЕ • СОЧЕТАНИЕ ВРАЩЕНИЯ И СКОЛЬЖЕНИЯ
Типы артро-кинематических движений Характер движения в суставах обусловливается формой суставных поверхностей. Различают следующие виды движений суставных поверхностей: • ВРАЩЕНИЕ • СКОЛЬЖЕНИЕ • СОЧЕТАНИЕ ВРАЩЕНИЯ И СКОЛЬЖЕНИЯ
 вокруг суставной оси (большинство суставных поверхностей имеет некоторую кривизну). Чисто") Вращение • (угловое движение) вокруг суставной оси (большинство суставных поверхностей имеет некоторую кривизну). Чисто вращательное движение может привести к дислокации сочленяющихся костей.
Вращение • (угловое движение) вокруг суставной оси (большинство суставных поверхностей имеет некоторую кривизну). Чисто вращательное движение может привести к дислокации сочленяющихся костей.
 • изолированное скольжение может вызвать повреждение суставных поверхностей.") Скольжение (линейное движение) • изолированное скольжение может вызвать повреждение суставных поверхностей.
Скольжение (линейное движение) • изолированное скольжение может вызвать повреждение суставных поверхностей.
. • Возможно также ограниченное линейное") Сочетание вращения и скольжения • (наиболее частый вид движений). • Возможно также ограниченное линейное удаление суставных поверхностей друг от друга, как это, например, наблюдается при растягивании пальцев.
Сочетание вращения и скольжения • (наиболее частый вид движений). • Возможно также ограниченное линейное удаление суставных поверхностей друг от друга, как это, например, наблюдается при растягивании пальцев.
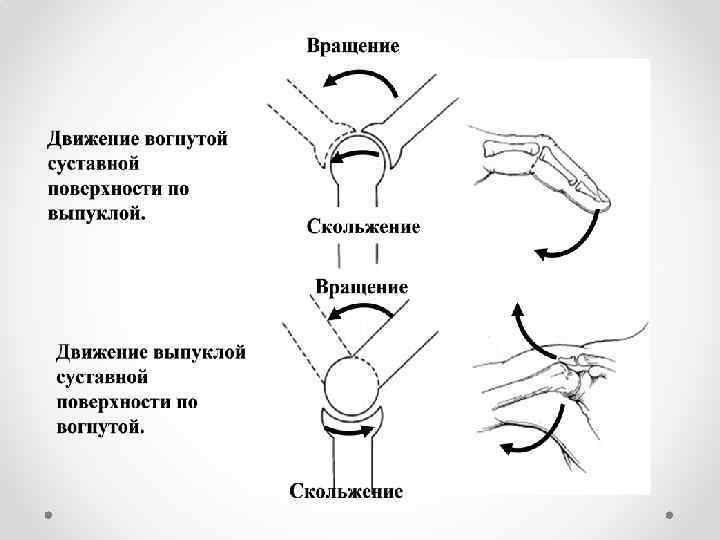
 Правило сочетанного вращения и скольжения • При движении вогнутой суставной поверхности по выпуклой вращение и скольжение происходят в одном направлении. • При движении выпуклой поверхности сустава по вогнутой вращение и скольжение происходят в противоположных направлениях.
Правило сочетанного вращения и скольжения • При движении вогнутой суставной поверхности по выпуклой вращение и скольжение происходят в одном направлении. • При движении выпуклой поверхности сустава по вогнутой вращение и скольжение происходят в противоположных направлениях.
 Правило сочетанного вращения и скольжения • Сочетание вращения и скольжения даёт некоторые анатомические преимущества так как меньшая суставная поверхность требуется для производства движений в суставе.
Правило сочетанного вращения и скольжения • Сочетание вращения и скольжения даёт некоторые анатомические преимущества так как меньшая суставная поверхность требуется для производства движений в суставе.
 Виды остео-кинематических движений в суставах
Виды остео-кинематических движений в суставах
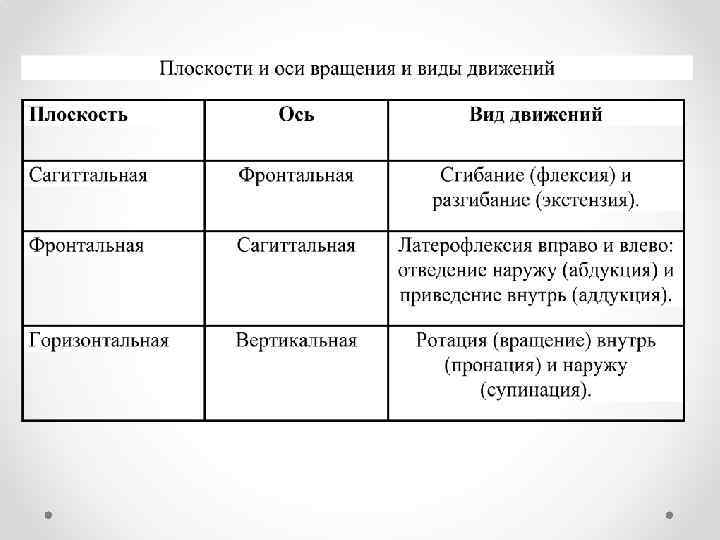
 Все движения костных звеньев в суставах рассматриваются из анатомического положения тела. • Движение вокруг фронтальной оси в сагиттальной плоскости • Движение вокруг сагиттальной оси во фронтальной плоскости • Движение вокруг продольной (вертикальной) оси тела или сегмента в горизонтальной плоскости • Последовательный переход движения с одной оси на другую
Все движения костных звеньев в суставах рассматриваются из анатомического положения тела. • Движение вокруг фронтальной оси в сагиттальной плоскости • Движение вокруг сагиттальной оси во фронтальной плоскости • Движение вокруг продольной (вертикальной) оси тела или сегмента в горизонтальной плоскости • Последовательный переход движения с одной оси на другую
 – уменьшение") • Движение вокруг фронтальной оси в сагиттальной плоскости: o Сгибание (флексия) – уменьшение угла между сочленяющимися костными звеньями. o Разгибание (экстензия) – увеличение угла и выпрямление конечности. o В области головы, шеи и туловища – наклоны вперед и назад
• Движение вокруг фронтальной оси в сагиттальной плоскости: o Сгибание (флексия) – уменьшение угла между сочленяющимися костными звеньями. o Разгибание (экстензия) – увеличение угла и выпрямление конечности. o В области головы, шеи и туловища – наклоны вперед и назад
 или абдукция") • Движение вокруг сагиттальной оси во фронтальной плоскости: o. Отведение (наружу) или абдукция – удаление звена от срединной плоскости тела. o. Приведение (внутрь) или аддукция – приближение звена к срединной плоскости. o. Наклоны в стороны головы и туловища.
• Движение вокруг сагиттальной оси во фронтальной плоскости: o. Отведение (наружу) или абдукция – удаление звена от срединной плоскости тела. o. Приведение (внутрь) или аддукция – приближение звена к срединной плоскости. o. Наклоны в стороны головы и туловища.
 оси тела или сегмента в горизонтальной плоскости: o.") • Движение вокруг продольной (вертикальной) оси тела или сегмента в горизонтальной плоскости: o. Вращение конечности внутрь (пронация) и вращение наружу (супинация). o. Повороты головы и шеи в стороны (скручивание).
• Движение вокруг продольной (вертикальной) оси тела или сегмента в горизонтальной плоскости: o. Вращение конечности внутрь (пронация) и вращение наружу (супинация). o. Повороты головы и шеи в стороны (скручивание).
. Периферический") • Последовательный переход движения с одной оси на другую круговое движение (циркумдукция). Периферический конец кости движется по окружности а вся кость описывает конус + вращение звена вокруг его продольной оси. (Пример: круговое движение руки в плечевом суставе
• Последовательный переход движения с одной оси на другую круговое движение (циркумдукция). Периферический конец кости движется по окружности а вся кость описывает конус + вращение звена вокруг его продольной оси. (Пример: круговое движение руки в плечевом суставе
 Возможны и дополнительные движения, такие как пружинящие (удаление и сближение суставных поверхностей при сжатии и растяжении) и скручивание. Эти движения относятся не к отдельным суставам, а к группе комбинированных суставов (например межпозвоночных)
Возможны и дополнительные движения, такие как пружинящие (удаление и сближение суставных поверхностей при сжатии и растяжении) и скручивание. Эти движения относятся не к отдельным суставам, а к группе комбинированных суставов (например межпозвоночных)
 не позволяет совершать неограниченные движения в одну") • Строение сочленений костных звеньев (суставов) не позволяет совершать неограниченные движения в одну сторону. Имеются анатомические ограничения движению при достижении которых происходит смена направления движения звена. Поэтому, движения костных звеньев являются возвратными (возвратновращательными и возвратнопоступательными).
• Строение сочленений костных звеньев (суставов) не позволяет совершать неограниченные движения в одну сторону. Имеются анатомические ограничения движению при достижении которых происходит смена направления движения звена. Поэтому, движения костных звеньев являются возвратными (возвратновращательными и возвратнопоступательными).
 Понятие биомеханической системы тела. Биокинематические цепи
Понятие биомеханической системы тела. Биокинематические цепи
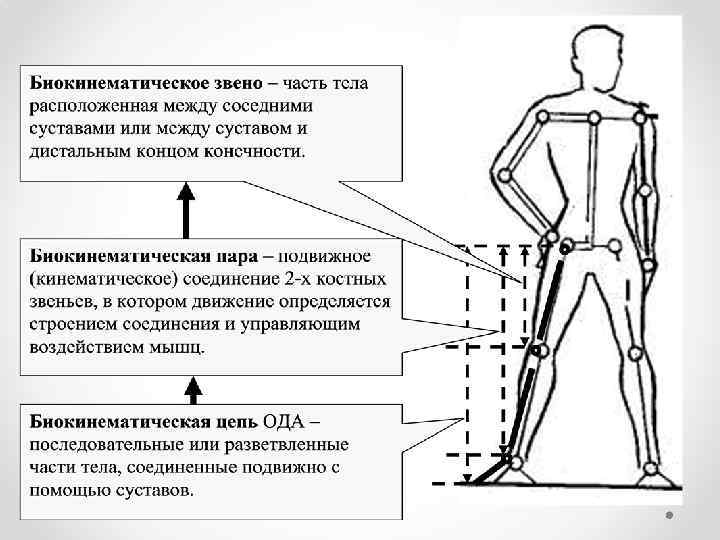
 • Биомеханическая система тела - это упрощенная модель тела человека, используемая для изучения закономерностей движений. Она состоит из: • биокинематических цепей; • цепи состоят из пар; • а пары из звеньев.
• Биомеханическая система тела - это упрощенная модель тела человека, используемая для изучения закономерностей движений. Она состоит из: • биокинематических цепей; • цепи состоят из пар; • а пары из звеньев.
 В опорно двигательном аппарате человека выделяют около 70 биокинематических звеньев, которые можно объединить в 15 более крупных звеньев (15 звенная модель человеческого тела).
В опорно двигательном аппарате человека выделяют около 70 биокинематических звеньев, которые можно объединить в 15 более крупных звеньев (15 звенная модель человеческого тела).
 Виды биокинематических цепей 2 вида биокинематических цепей: замкнутые и незамкнутые.
Виды биокинематических цепей 2 вида биокинематических цепей: замкнутые и незамкнутые.
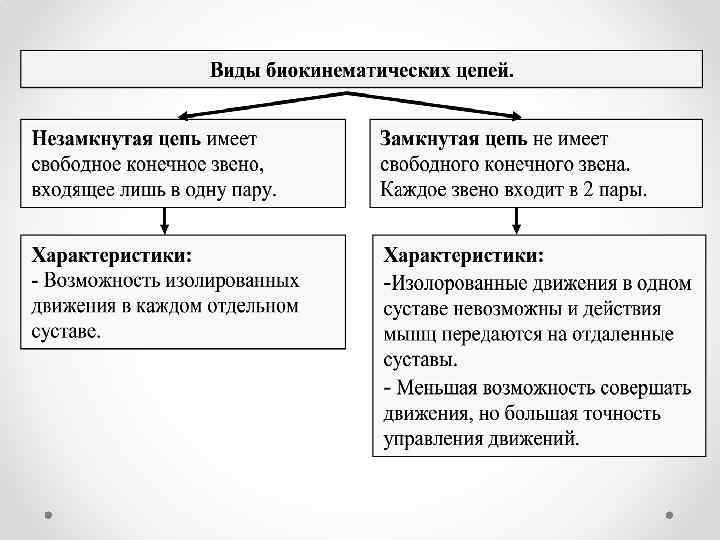
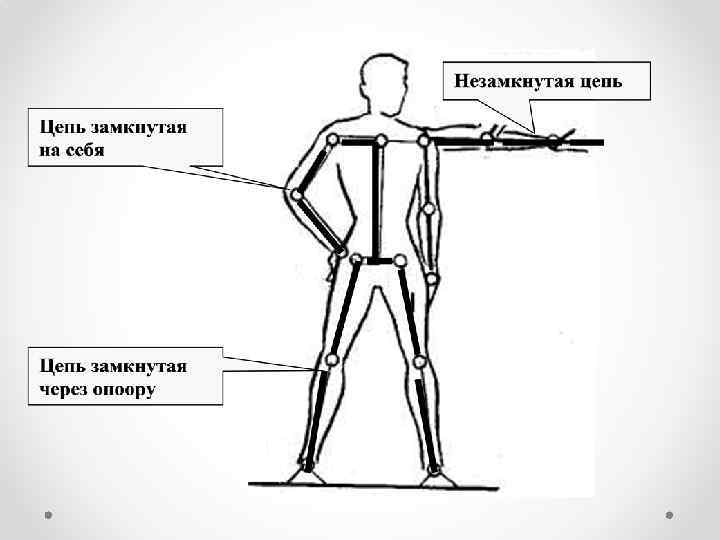
. Незамкнутая цепь может стать замкнутой,") Замыкание цепи изменяет её свойства (передачу усилий, возможности управления). Незамкнутая цепь может стать замкнутой, если конечное свободное звено получит связь с другим звеном цепи (непосредственно или через какое либо тело) или с опорой. Некоторые замкнутые цепи разомкнуть невозможно, так как замыкание является анатомическим. Например, цепь включающая грудину, ребро, позвоночник, ребро и снова грудину.
Замыкание цепи изменяет её свойства (передачу усилий, возможности управления). Незамкнутая цепь может стать замкнутой, если конечное свободное звено получит связь с другим звеном цепи (непосредственно или через какое либо тело) или с опорой. Некоторые замкнутые цепи разомкнуть невозможно, так как замыкание является анатомическим. Например, цепь включающая грудину, ребро, позвоночник, ребро и снова грудину.
. Фиксирование") • Цепи отличаются переменным составом, длиной и формой (составные рычаги и маятники). Фиксирование суставов (блокада) и их освобождение (снятие динамических связей тяги мышц) изменяют число движущихся звеньев в цепи. Твердые (кости), упругие (мышцы) и гибкие (связки, сами мышцы; и их сухожилия) звенья, изменяя степень и характер своего участия в движениях, обеспечивают многообразные возможности движений.
• Цепи отличаются переменным составом, длиной и формой (составные рычаги и маятники). Фиксирование суставов (блокада) и их освобождение (снятие динамических связей тяги мышц) изменяют число движущихся звеньев в цепи. Твердые (кости), упругие (мышцы) и гибкие (связки, сами мышцы; и их сухожилия) звенья, изменяя степень и характер своего участия в движениях, обеспечивают многообразные возможности движений.
 Степени свободы и связи движений в биокинематической цепи
Степени свободы и связи движений в биокинематической цепи
 может поступательно двигаться в пространстве в 3") • Физическое тело без ограничений (связей) может поступательно двигаться в пространстве в 3 х плоскостях и вращаться вокруг оси в каждой плоскости – имеет 6 степеней свободы движений. Закрепление звена приводит к образованию связи, т. е. связанному движению закрепленного звена с точкой закрепления. Связи уменьшают число степеней свободы
• Физическое тело без ограничений (связей) может поступательно двигаться в пространстве в 3 х плоскостях и вращаться вокруг оси в каждой плоскости – имеет 6 степеней свободы движений. Закрепление звена приводит к образованию связи, т. е. связанному движению закрепленного звена с точкой закрепления. Связи уменьшают число степеней свободы
 Влияние фиксации на степени свободы движений звеньев биокинематических цепей
Влияние фиксации на степени свободы движений звеньев биокинематических цепей
 Cложение степеней свободы в открытых биокинематических цепях
Cложение степеней свободы в открытых биокинематических цепях
 каждого следующего звена в цепи равна сумме его собственной") • Степень подвижности (свободы) каждого следующего звена в цепи равна сумме его собственной подвижности и подвижности предыдущих звеньев, которые лежат на пути к нему. Поэтому, наибольшие количество степеней свободы движений имеется у конечных (дистальных) звеньев цепи. Пример. Плечо имеет 3 степени свободы движений относительно лопатки. Предплечье имеет 2 степени свободы движений относительно плеча. Кисть имеет 2 степени свободы относительно предплечья. → Кисть относительно лопатки имеет 7 степеней свободы движений.
• Степень подвижности (свободы) каждого следующего звена в цепи равна сумме его собственной подвижности и подвижности предыдущих звеньев, которые лежат на пути к нему. Поэтому, наибольшие количество степеней свободы движений имеется у конечных (дистальных) звеньев цепи. Пример. Плечо имеет 3 степени свободы движений относительно лопатки. Предплечье имеет 2 степени свободы движений относительно плеча. Кисть имеет 2 степени свободы относительно предплечья. → Кисть относительно лопатки имеет 7 степеней свободы движений.
 • Ограничение суммации: максимальное количество степеней свободы в звене после суммации не может быть больше 6. Если же при суммировании степеней свобо ды конечное звено имеет их больше шести, то это значит, что при фиксировании этого звена промежуточные звенья сохраняют степени свободы на шесть степе ней меньше. Пример. При замыкании кисти на опору плечо и предплечье сохраняют 7 6 = 1 степень свободы. Они смогут двигаться лишь вокруг оси, соединяю щей плечевой и лучезапястный суставы.
• Ограничение суммации: максимальное количество степеней свободы в звене после суммации не может быть больше 6. Если же при суммировании степеней свобо ды конечное звено имеет их больше шести, то это значит, что при фиксировании этого звена промежуточные звенья сохраняют степени свободы на шесть степе ней меньше. Пример. При замыкании кисти на опору плечо и предплечье сохраняют 7 6 = 1 степень свободы. Они смогут двигаться лишь вокруг оси, соединяю щей плечевой и лучезапястный суставы.
 Неполносвязные и полносвязные биодинамические системы Пассивный аппарат большинства суставов имеет более 1 степени свободы движений (дву и многоосные суставы) – неполносвязная система. Двуосные суставы имеют 2 оси вследствие неполного соответствия по форме суставных поверхностей – 2 степени свободы (пример: лучезапястный сустав)
Неполносвязные и полносвязные биодинамические системы Пассивный аппарат большинства суставов имеет более 1 степени свободы движений (дву и многоосные суставы) – неполносвязная система. Двуосные суставы имеют 2 оси вследствие неполного соответствия по форме суставных поверхностей – 2 степени свободы (пример: лучезапястный сустав)
 в биокинематической системе достигается за счет") Ограничение степеней свободы до 1 (выключение лишних движений) в биокинематической системе достигается за счет управляющего действия мышц (биодинамически полносвязная система). Координированные сокращения и расслабления 2 х функциональных групп мышц (синергисты и антагонисты) вызывают дополнительные связи и оставляют для движения только одну степень свободы. Кроме этого, мышцы при необходимости ограничивают размах движений, затормаживая звенья раньше, чем наступает пассивное ограничение (костно суставно связочное).
Ограничение степеней свободы до 1 (выключение лишних движений) в биокинематической системе достигается за счет управляющего действия мышц (биодинамически полносвязная система). Координированные сокращения и расслабления 2 х функциональных групп мышц (синергисты и антагонисты) вызывают дополнительные связи и оставляют для движения только одну степень свободы. Кроме этого, мышцы при необходимости ограничивают размах движений, затормаживая звенья раньше, чем наступает пассивное ограничение (костно суставно связочное).
 Составные движения в биокинематических цепях
Составные движения в биокинематических цепях
 • Составное движение в открытой цепи – результат движений всех звеньев цепи. Пример: бросок мяча является результатом движений ног, туловища и звеньев руки.
• Составное движение в открытой цепи – результат движений всех звеньев цепи. Пример: бросок мяча является результатом движений ног, туловища и звеньев руки.
 • Выделяют движения несущих и несомых звеньев. Пример: мах бедром при выносе ноги в беге – несущее движение, а сгибание голени – несомое движение. Несущее движе ние изменяет несомое. Однонаправленные движения (перемещения, скорости и ускорения) звеньев складываются, а разнонаправленные вычитаются.
• Выделяют движения несущих и несомых звеньев. Пример: мах бедром при выносе ноги в беге – несущее движение, а сгибание голени – несомое движение. Несущее движе ние изменяет несомое. Однонаправленные движения (перемещения, скорости и ускорения) звеньев складываются, а разнонаправленные вычитаются.
 ЛИТЕРАТУРА: • Годик М. А. Спортивная метрология: учебник для ИФК. – М. : Физкультура и спорт, 1988 • Зациорский В. М. , Аруин А. С. , Селуянов В. Н. Биомеханика двигательного аппарата человека. – М. : Физкультура и спорт, 1981 • Практикум по биомеханике: Пособие для ин тов физ. культ /Под общ. ред. к. б. н. И. М. Козлова. – М. : Физкультура и спорт, 1980 • Уткин В. А. Биомеханика физических упражнений: Учеб. пособие для ф тов физвоспитания. – М. : Просвещение, 1989 • http: //mir la. com – «Мир легкой атлетики»
ЛИТЕРАТУРА: • Годик М. А. Спортивная метрология: учебник для ИФК. – М. : Физкультура и спорт, 1988 • Зациорский В. М. , Аруин А. С. , Селуянов В. Н. Биомеханика двигательного аппарата человека. – М. : Физкультура и спорт, 1981 • Практикум по биомеханике: Пособие для ин тов физ. культ /Под общ. ред. к. б. н. И. М. Козлова. – М. : Физкультура и спорт, 1980 • Уткин В. А. Биомеханика физических упражнений: Учеб. пособие для ф тов физвоспитания. – М. : Просвещение, 1989 • http: //mir la. com – «Мир легкой атлетики»
 СПАСИБО ЗА ВНИМАНИЕ!
СПАСИБО ЗА ВНИМАНИЕ!