Т-8 зан.1.ppt
- Количество слайдов: 33



Сибирский федеральный университет Лекция. По дисциплине «ВОЕННО -ТЕХНИЧЕСКАЯ ПОДГОТОВКА» Тема № 8 Системы вращения , качания антенн и синхронно-следящего привода. Занятие № 1 Система вращения и наклона антенны и синхронно-следящего привода изделия 1 РЛ 131.

Сибирский федеральный университет УЧЕБНЫЕ ВОПРОСЫ : Вопрос№ 1. Назначение, состав и технические характеристики системы Вопрос№ 2. Структурная схема СВА.

Сибирский федеральный университет УЧЕБНЫЕ ЦЕЛИ: 1. Изучить назначение, состав, технические характеристики, режимы работы системы вращения антенны. 2. Изучить принцип работы системы вращения антенна по структурной и функциональной схеме.

Сибирский федеральный университет

Сибирский федеральный университет 1. 2. 3. 4. 5. 6. Перечислите режимы работы индикаторных устройств и органы управления режимами работы? Каким образов в ВИКО формируется визирная развёртка? Каким образом в ИКО формируется радиально-круговая развёртка? В следствии каких причин результирующий вектор магнитного потока в индикаторе с радиально-круговой разверткой остается постоянным? Каким образом в индикаторе изделия 1 РЛ 131 обеспечивается постоянство масштаба при несимметричном запуске? В чем заключается сущность динамической фокусировки изображения на экране ЭЛТ в изделии 1 РЛ 131?

Сибирский федеральный университет Вопрос№ 1. Назначение, состав и технические характеристики системы Система вращения и наклона антенны (СВНА) предназначена для вращения антенны в горизонтальной плоскости и наклона стрел антенны в вертикальной плоскости. Система вращения антенны (СВА) имеет следующие режимы работы:

Сибирский федеральный университет Автономная работа СВА в режиме кругового вращения со скоростями 2± 0, 2 об/мин, 4± 0, 2 об/мин, 6± 0, 3 об/мин и стабильностью скорости вращения ± 5%. Данный режим применяется для поиска и обнаружения целей. Скорость 4 об/мин является основной скоростью вращения антенны и используется при поиске и обнаружении целей на всех высотах. Скорость 6 об/мин применяется при поиске и обнаружении маловысотных целей. Скорость 2 об/мин применяется при поиске высотных целей, а при обнаружении включается скорость 6 об/мин. В автономном режиме кругового вращения РЛС П-18 может быть использована в качестве ведущей РЛС для других станций и высотомера ПРВ-13.

Сибирский федеральный университет Автономная работа СВА в режиме плавного изменения скорости от 0, 3 до 6 об/мин с реверсированием направления вращения. Кроме того, в этом режиме можно включить замедленную скорость от 0 до 3 об/мин для снятия диаграммы направленности антенны в вертикальной плоскости по радиоизлучению солнца. Режим плавного изменения скорости применяется для настройки схемы компенсации ветра аппаратуры СПЦ, поиска целей в секторе, уточнения характеристик целей, а также может быть использован для поиска и обнаружения целей.

Сибирский федеральный университет Работа СВА в режиме слежения за антенной сопрягаемой РЛС. В этом режиме антенна РЛС П 18 повторяет вращение ведущей РЛС. Данный режим применяется при сопряжении с другими РЛС для совмещения воздушной обстановки на экране индикатора от сопрягаемых станций и оперативного подключения одной из сопрягаемых РЛС к АСУ.

Сибирский федеральный университет СВА обеспечивает вращение антенны при следующих ветровых нагрузках и гололеде: при скорости ветра до 20 м/с без гололеда обеспечивается работа на скоростях 2; 4 и 6 об/мин; при скорости ветра до 30 м/с без гололеда — 2 об/мин; при скорости ветра до 10 м/с и гололеде толщиной до 10 мм — 2; 4 и 6 об/мин. Система наклона антенны служит для наклона антенны в вертикальной плоскости в диапазоне углов от — 5 до +15°.

Рис. 5. 8. Структурная схема системы вращения и наклона антенны

Сибирский федеральный университет Состав СВНА: При автономной работе РЛС заданные режимы вращения антенны обеспечивают следующие блоки системы [1, рис. 5. 8]: привод вращения антенны (блок 31); блок коммутации СВНА (блок 32); ЭМУ (блок 41); элементы управления, расположенные в АПУ (блок 11 М) и ВПУ (блок 22 М). При работе СВНА в режиме слежения, помимо вышеуказанных блоков, также используются: блок сельсинов приемников (блок 29); блок усилителя силового следящего привода (блок 37).

Сибирский федеральный университет Для передачи на системы станции напряжений, соответствующих положению антенны РЛС по азимуту, предназначена СПА. В состав СПА входят [1, рис. 5. 12]: блок СП (блок 29); блок СД (блок 28); ВТ M 1 в шкафу 1 б; устройство управления излучением в блоке 12 М (23 М); синусно косинусный механизм в блоке 12 М (23 М); СП M 1 и М 2 в блоке 17, включенные в трансформаторном режиме; блок управления визиром (блок 24); блок целеуказаний (блок 26).

Сибирский федеральный университет Силовой привод. Обеспечивает автономную работу СВА в режимах кругового вращения и плавного изменения скорости и включает: блок коммутации СВА (блок 32); электромашинный усилитель ЭМУ (блок 41); привод вращения антенны (блок 31). С приводом вращения (блок 31) механически связаны и конструктивно размещены на нем блок сельсинов приемников (блок 29) и блок сельсинов датчиков (блок 28). С блока сельсинов приемников в этих режимах выдаются напряжения синхронизации по вращению на сопрягаемые ведомые изделия. Блок сельсинов датчиков обеспечивает передачу напряжения, пропорционального углу поворота антенны на устройства станции. Кроме того, в приводе вращения конструктивно размещен электродвигатель наклона антенны.

Сибирский федеральный университет Рис. 11. 2. Привод вращения антенны
")
Сибирский федеральный университет Рис. 11. 7. Передняя панель блока коммутации СВА (блок 32)
")
Сибирский федеральный университет Рис. 11. 4. Передняя панель блока сервоусилителя ПСП (блок 91)
")
Сибирский федеральный университет Рис. 11. 5. Передняя панель сервоусилителя следящего привода (блок 94)

Сибирский федеральный университет Вопрос№ 2. Структурная схема СВА. Структурная схема СВНА и СПА
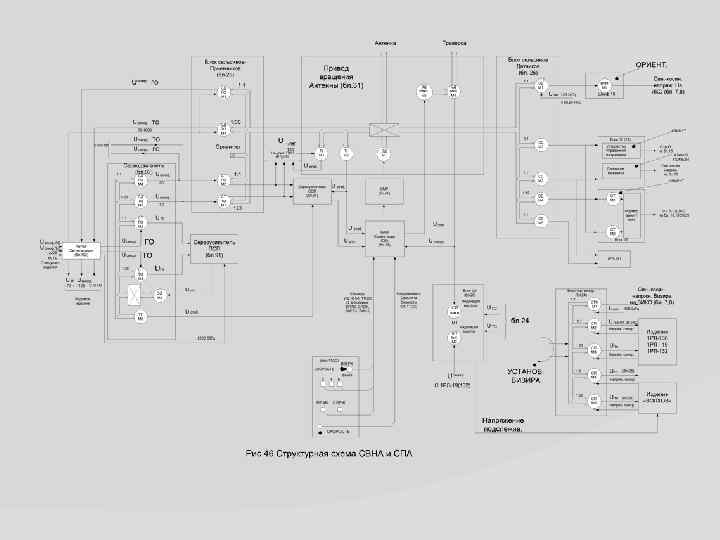

Сибирский федеральный университет При автономной работе станции заданные режимы вращения антенны обеспечивают следующие блоки системы: привод вращения антенны (блок 31), блок коммутации СВА (блок 32), электромашинный усилитель (ЭМУ, блок 41), элементы управления, расположенные в аппаратном (блок 11 М) и выносном (блок 22 М) пультах управления. В качестве датчика стабильных скоростей вращения используется источник постоянного тока.

Сибирский федеральный университет Система вращения в режиме плавного изменения скорости представляет собой разомкнутую следящую систему, когда не используются сигналы обратных связей. Напряжение управления на обмотки ЭМУ подается с сельсина датчика блока 11 М (блок 22 М) после фазового детектирования в блоке 32. В режиме замедленной плавной скорости вращения напряжение на входе фазового детектора меньше, чем в предыдущем случае, за счет падения напряжения на резисторе, подключаемом последовательно в цепь выходного напряжения сельсина датчика скорости.

Сибирский федеральный университет Работа системы вращения в режиме слежения качественно отлична от работы в режиме стабильных и плавных скоростей. В этом режиме система вращения представляет собой одноканальную замкнутую следящую систему с использованием сельсина датчика грубого отсчета (ГО), которая позволяет изменять коэффициент усиления системы в зависимости от величины угла рассогласования в положениях ведущей и ведомой антенн.

Сибирский федеральный университет Управление системой вращения (включение и выключение системы, выбор и переключение режимов работы), а также управление приводом наклона стрел антенны производится с помощью блока коммутации СВА (блок 32) по командам, поступающим с аппаратного (блок 11 М) или выносного (блок 22 М) пультов управления.

Работа по структурной схеме При работе СВНА в режиме автономного вращения в качестве датчика стабильных скоростей вращения используется источник постоянного тока. Со специального УПТ блока 32 напряжение управления, пропорциональное заданной скорости вращения, подается на ЭМУ (блок 41), с выхода которого напряжение якоря через блок 32 поступает на якорь электродвигателя привода вращения (блок 31) [1, рис. 5. 8]. Напряжение возбуждения на электродвигатель привода вращения (+220 В) подается постоянно. Под действием приложенных напряжений привод вращает антенну с заданной скоростью, стабильность скорости обеспечивается использованием в УПТ в качестве сигнала обратной связи напряжения с тахогенератора М 2 блока 31. СВНА в режиме плавного изменения скорости представляет собой разомкнутую следящую систему, когда не используются сигналы обратных связей.
")
Напряжение управления на обмотки ЭМУ подается с СД блока 11 М (блок 22 М) после фазового детектирования в блоке 32. В режиме замедленной плавной скорости вращения напряжение на входе ФД меньше, чем в предыдущем случае, за счет падения напряжения на резисторе, подключаемом последовательно в цепь выходного напряжения СД скорости. Работа СВНА в режиме слежения качественно отлична от работы в режиме стабильных и плавных скоростей. В этом режиме СВНА представляет собой одноканальную замкнутую следящую систему с использованием СД грубого отсчета (ГО), которая позволяет изменять коэффициент усиления системы в зависимости от величины угла рассогласования в положениях ведущей и ведомой антенн.

Напряжение синхронизации канала ГО с ведущего изделия поступает на СП ГО блока 29, включенный в трансформаторном режиме. При вращении антенны ведущего изделия напряжение рассогласования с СП М 2 блока 29 поступает на усилитель силового следящего привода (блок 37). Усиленное напряжение рассогласования через блок коммутации СВНА (блок 32) в виде напряжения управления поступает на ЭМУ (блок 41). С выхода ЭМУ усиленный по напряжению и мощности сигнал поступает на электродвигатель M 1 привода вращения (блок 31), который поворачивает антенну и СП блока 29 в сторону уменьшения напряжения рассогласования. Для устойчивой работы СВНА в режиме «Слежение» с заданной ошибкой слежения применены обратные связи.
")
Сигнал положительной обратной связи по току поступает на усилитель силового следящего привода (блок 37) с компенсационной обмотки ЭМУ (блок 41), а сигнал отрицательной обратной связи по напряжению подается с тахогенератора М 2 привода вращения (блок 31). Для передачи на системы станции напряжений, соответствующих положению антенны РЛС по азимуту, предназначена СПА.

При сопряжении с другими радиоэлектронными средствами СПА выдает на них импульсы азимутального масштаба и напряжения, соответствующие положению антенны РЛС по азимуту. СПА обеспечивает выдачу напряжений для формирования РКР и создания ОА масштабной сетки ИКО и ВИКО. При этом истинный отсчет координат цели (по азимуту) производится после предварительного ориентирования РЛС с помощью специальных устройств системы. Кроме того, СПА обеспечивает работоспособность СКДВ системы СДЦ, работоспособность автоматических устройств управления режимами излучения РЛС, а также привода вращения НРЗ путем выдачи на них напряжений с соответствующих датчиков системы.

В зависимости от конкретного вида сопряжения СПА не только выдает на ведомое изделие импульсы азимутального масштаба и напряжения синхронизации, но и может обеспечивать управление установкой антенны сопрягаемого изделия на любой заданный азимут, а также выдачу на пряжения рассогласования антенн РЛС и ведомого изделия, обеспечивая взаимную сигнализацию операторов в необходимом объеме.
, а также управление")
Управление СВНА (включение и выключение системы, выбор и переключение режимов работы), а также управление приводом наклона стрел антенны производится с помощью блока коммутации СВНА (блок 32) по командам, поступающим с АПУ (блок 11 М) или ВПУ (блок 22 М). В качестве основного первичного источника питания блоков системы используется стабилизированное трехфазное напряжение 220 В, 50 Гц с блока распределения питания (блок 34). Питание приводного электродвигателя ЭМУ производится нестабилизированным трехфазным напряжением 220 В, 50 Гц блока 34.

Сибирский федеральный университет В качестве основного первичного источника питания блоков системы используется стабилизированное трехфазное напряжение 220 В, 50 Гц с блока распределения питания (блок 34). Питание приводного электродвигателя ЭМУ производится нестабилизированным трехфазным напряжением 220 В, 50 Гц бло а к 34. В режиме «Слежение» для обеспечения работоспособности системы подается напряжение 220 В, 50 ГЦ от ведущего изделия, синфазное с напряжением возбуждения сельсинов датчиков канала «ГО» ведущего изделия. Основные вторичные источники питания системы представлены выпрямителями +220 В, +50 В, +110 В блока 32, +26 В, минус 24 В блока 34, стабилизированным источником + 110 В блока 36.

Сибирский федеральный университет Задание на самоподготовку: -изучить назначение состав и технические характеристики СВНА -изучить работу СВНА по структурной схеме.
Т-8 зан.1.ppt