d4da29a8d58d4df329fcb224434f8a76.ppt
- Количество слайдов: 31



Self Parking Prepared By: Lara Sabah Yaqeen Salatneh Submitted to: Dr. Ashraf Armoush Dr. Luai Malhis Eng. Haya Samaneh

Outline Ø Introduction Ø Project Scope Ø Hardware Components Ø Software Algorithms Ø Problems Ø Future development

Introduction technology come up and need to upgrade. Time is very important Parking difficult to many drivers.
 Therefore… We build a fully automated car that park in the garage without")
Introduction(Cont) Therefore… We build a fully automated car that park in the garage without need for a driver.

Project Scope Our project is designed for one type of parking and it can be used by Car Companies and any one have a car.

Hardware Components • Car body • HC-05 Bluetooth module
 • Microcontroller In our project we used Arduino Uno Kit of AT")
Hardware Components(cont) • Microcontroller In our project we used Arduino Uno Kit of AT mega 328 P microcontroller.
 • DC Motors We use four DC motors with 500 m. A")
Hardware Components(cont) • DC Motors We use four DC motors with 500 m. A and 5 Volt.
 • H-bridge L 293 d is used. The motion has five states:")
Hardware Components(cont) • H-bridge L 293 d is used. The motion has five states: 1. Forward 2. Backward 3. Left 4. Right 5. Circular direction
 • Sensors Act as sensing component to the environment. 1. Tcrt 5000")
Hardware Components(cont) • Sensors Act as sensing component to the environment. 1. Tcrt 5000 IR Sensor. 2. Sharp IR which type of family GP 2 Y 0 A 21 YK 0 F.
 3. Ultrasonic. 4. Photo interrupter")
Hardware Components(cont) 3. Ultrasonic. 4. Photo interrupter
 • Power Supply The main power supply in our project is AC")
Hardware Components(cont) • Power Supply The main power supply in our project is AC Adapter , that convert 220 V to 5 V and provides 500 m. A to motors.

Software Algorithm Bluetooth Communication Line Follower Parking
 ü Bluetooth Communication start Read Serial Port No Retrieve Serial port =")
Software Algorithm(cont) ü Bluetooth Communication start Read Serial Port No Retrieve Serial port = 0 Yes Start parking
 • Android APP")
Software Algorithm(cont) • Android APP

Bluetooth video
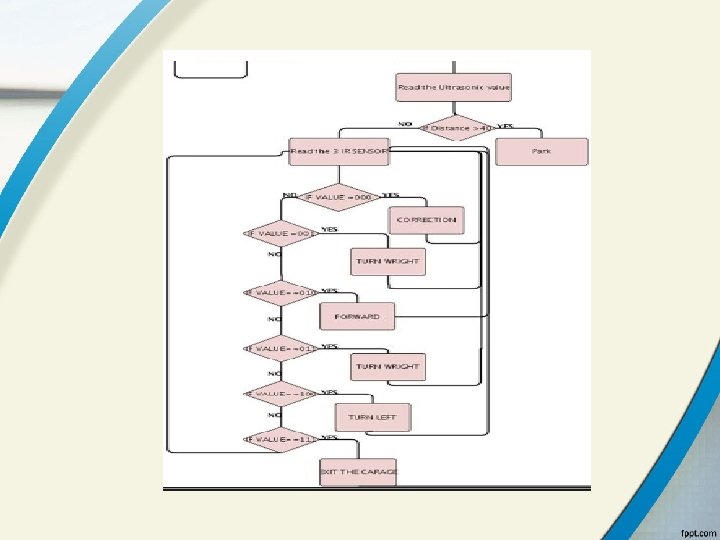
 ü Line following part: Control Dc Motor Dual H-bridge control the direction")
Software Algorithm(cont) ü Line following part: Control Dc Motor Dual H-bridge control the direction and the speed of the motor. Input 1 GND 5 V input 2 GND GND 5 V SV 5 V Direction Stopped Turns in direction A (Left) Turns in direction B (Right) Stopped
 TCRT 5000 (IR Sensor) • Open to air- more than 1014. •")
Software Algorithm(cont) TCRT 5000 (IR Sensor) • Open to air- more than 1014. • Reflecting Black(Black tap) -(600 -900) analog value. • Reflecting white(white • paper)- less than 50.
 ü Parking How ultra sonic reed the distance")
Software Algorithm(cont) ü Parking How ultra sonic reed the distance

Line follower video
")
Software Algorithm(cont)
")
Software Algorithm(cont)
 circumference = 22. 5 cm")
Software Algorithm(cont) circumference = 22. 5 cm

Parking

Problems • Find a suitable toy car that will be suitable with our project. • Power supply that give more than one Amber current. • Unavailable ICs like Wi-Fi which we used instead of it the Bluetooth.
 • Problem with motor and high current needed to operate them, and safety")
Problems(cont) • Problem with motor and high current needed to operate them, and safety method needed to protect the basic circuit from the backward current. • Problem of dealing with sensor and floating value, some time sensor read wrong value.

Future Development • We hope to make our project support parallel parking. • We hope to make the robot smarter such that prevent any obstacles in his way. • Add more feature to the mobile APP.

Conclusion • Use this project for industrial purposes in a wide range • Low cost. • a fully automated self parking system. • The accuracy of this project may be improved by adding some features.

Any Question?

Thank you
d4da29a8d58d4df329fcb224434f8a76.ppt