Лекция 4 Динамика вращательного движения.ppt
- Количество слайдов: 72



Сегодня: Thursday, February 1, 2018 ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ

Сегодня: Thursday, February 1, 2018 Лекция Тема: ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ Содержание лекции: Введение 1. Момент силы 2. Векторное произведение 3. Момент импульса 4. Закон сохранения момента импульса для системы частиц 5. Вращение твердого тела вокруг неподвижной оси. Момент инерции. 6. Расчет моментов инерции 7. Кинетическая энергия вращения 8. Гироскоп

Введение Описание движения системы материальных точек является более сложной задачей по сравнению с описанием движения материальной точки. Под действием внешних сил система материальных точек будет двигаться аналогично движению центра масс. Радиус вектор центра следующим выражением: масс определяется

Движение Ц, М, подчиняется уравнению где масса системы

Тело может крутиться, колебаться, но при отсутствии внешних сил центр масс будет двигаться с постоянной скоростью. Движение центра масс можно рассматривать отдельно от всех внутренних движений и его можно не учитывать при изучении вращения. Для описания вращения вводятся: момент силы М – величина, определяющая изменение состояния вращения тела; момент импульса L величина, изменяющаяся под действием момента силы.

Эти величины подобны силе и импульсу в динамике поступательного движения. Изучать вращение удобно на примере вращения твердого тела вокруг неподвижной оси. В этом случае каждая точка твердого тела движется в плоскости, перпендикулярной к оси плоское двумерное вращение. Затем легко обобщить полученные результаты на случай трехмерного вращения.

6. 2. Момент силы Пусть тело вращается в плоскости xy вокруг оси, перпендикулярной плоскости xy. Момент силы равен составляющей силы, перпендикулярной радиусу Ft (тангенциальная составляющая), умноженной на радиус r. O d r┴ Ft r A B Рис. 2. Fn F

Составляющая силы Fn, направленная вдоль радиуса, не изменяет состояние вращения тела, а может только перемещать тело вдоль радиуса.
![В векторной форме М=[r, F ] Вектор M направлен перпендикулярно плоскости, в которой](https://present5.com/presentation/3/-32919367_63066682.pdf-img/-32919367_63066682.pdf-9.jpg "В векторной форме М=[r, F ] Вектор M направлен перпендикулярно плоскости, в которой")
В векторной форме М=[r, F ] Вектор M направлен перпендикулярно плоскости, в которой расположены векторы r, F. Из конца вектора М мы наблюдаем вращение вектора r против часовой стрелки (правило правого винта).

Для системы материальных точек Определенный таким образом момент силы, называется моментом силы относительно точки. М по модулю равен произведению модуля силы на плечо r , т. е. на длину перпендикуляра, опущенного из О на линию действия силы.

Моментом силы относительно оси z называется скалярная величина Mz, равная проекции на ось z вектора момента силы относительно любого центра О, взятого на этой оси: Mz = M 0 cos Рис. 3.

6. 3. Векторное произведение В определениях момента силы используется операция, называемая в векторном анализе векторным произведением. С = А, В = A B n. ABsin. Здесь n – единичный вектор, нормальный плоскости, содержащей векторы А и В. Для пратического определения направление вектора С принято использовать «правило правой руки» , или буравчика (правого винта).

Большой палец правой руки указывает направление n нормали к плоскости, проведенной через векторы А и В. Остальные пальцы согнуты в направлении от вектора А к В. Рис. 4. Правило правой руки Если вращать буравчик против часовой стрелки от А к В, то поступательное движение буравчика укажет направление вектора А, В.

Векторное произведение обладает следующими очевидными свойствами: А А = 0, А (В + С) = А В + А С, А В = – В А, i i = j j = k k = 0, i j = k, j k = i, k i = j; здесь i, j и k – единичные векторы соответственно вдоль осей x, y и z.

6. 4. Момент импульса Момент силы при вращательном движении определяет скорость изменения момента импульса L или углового момента системы частиц.

Момент импульса относительно оси равен тангенциальной составляющей импульса, умноженной на радиус: Lz = ptr, либо произведению импульса на плечо r Lz = pr. r – радиус вектор, проведенный из начала системы координат к материальной точке.

O d r┴ pt r A B Рис. 2. pn p
 и относительно")
Как и для момента силы, различают момент импульса относительно центра (точки) и относительно оси. Момент импульса Lz материальной точки относительно оси z, проходящей через центр О, равен проекции вектора L 0 на эту ось. M и L связаны между собой: М = d. L/dt

Для вычисления момента импульса справедливы все формулы, приведенные для вычисления момента силы, если в них заменить вектор F (или его проекции) вектором p (или его проекциями). Примером плоского двухмерного движения может служить движение планет по орбите вокруг Солнца: L = r p,

Член v p равен нулю, поскольку векторы v и р параллельны другу. Аналогично обращается в нуль и член r F, так как сила тяготения F – центральная сила, параллельная (или антипараллельная) вектору r. Таким образом, d. L/dt = 0 или L = const. Если на тело действует центральная сила любого происхождения, то момент импульса этого тела будет сохраняться.

6. 5. Закон сохранения момента импульса для системы частиц Пусть тело состоит из множества частиц, на которые действуют внутренние и внешние силы. Для каждой из частиц имеем (i – intrinsic, M(i) – моменты внутренних, e – extrinsic, M(e) – внешних сил): Просуммировав это выражение по всем частицам системы, получим

Поскольку внутренние силы – действие и противодействие – по третьему закону Ньютона равны, и равны их плечи то моменты внутренних сил взаимно сокращаются Mz(i) = 0. Поэтому скорость изменения момента импульса системы материальных точек относительно оси определяется моментом внешних сил относительно этой оси:

Полученное соотношение справедливо для движения любой совокупности частиц. Независимо от того, образуют они твердое тело или нет. Если на систему не действуют внешние силы или сумма моментов сил равна нулю, либо силы являются центральными, то момент количества движения системы остается постоянным закон сохранения момента импульса. . Векторная запись динамического закона вращения в трехмерном пространстве по форме напоминает уравнение Ньютона F = = dp/dt: M = d. L/dt.

Закон сохранения момента импульса для замкнутой системы является прямым следствием законов Ньютона и изотропности пространства – эквивалентности свойств пространства в различных направлениях. Задача 1. Студент на вращающейся скамье (скамья Жуковского) держит на вытянутых руках гантели и вращается со скоростью 1 = 0, 5 об/с. Затем прижимает гантели к груди (рис. ) и начинает вращаться с угловой скоростью 2. Определить скорость 2.

Начальный момент импульса гантелей: Ld 1 = R 1 mv 1 = R 1 m( 1 R 1) = m 1 R 12, где m – масса двух гантелей. Начальный момент импульса системы равен L 1 = Ls 1 + m 1 R 12, здесь Ls 1 – начальный момент импульса студента Рис. Студент, прижимая к себе гантели, начинает вращаться быстрее

Пусть Ls 1 = Ld 1= m 1 R 12. Момент импульса системы, находятся на расстоянии R 2: когда гантели L 2 = Ls 2 + m 2 R 22. Согласно закону сохранения импульса: Ls 2 + m 2 R 22 = Ls 1 + m 1 R 12. Момент импульса студента пропорционален скорости его вращения, поэтому Ls 2 = ( 2/ 1)Ls 1.

Подставляя этот результат в предшествующее равенство и учитывая, что Ls 1 = m 1 R 12, находим ( 2/ 1)Ls 1 + m 2 R 22 = Ls 1 + m 1 R 12. В результате находим 2 = 2 1 R 12/(R 12 + R 22), Угловая скорость вращения почти удваивается. Аналогичный принцип работает, когда вращающийся фигурист прижимает к себе руки и «группируется» .

Задача 2. Пусть студент, стоя на вращающейся скамье, держит над головой велосипедное колесо. Он раскручивает его до тех пор, пока колесо не приобретает угловую скорость 1 = 5 с 1. Затем студент сходит с вращающейся скамьи и вновь вступает на нее и при этом поворачивает Определим новую угловую скорость вращения ось вращения колеса студента. вниз, как показано на
; студент вновь на вращающейся скамье (б); студент поворачивает")
Рис. 9. Студент раскручивает колесо (а); студент вновь на вращающейся скамье (б); студент поворачивает колесо вниз (в)

Начальный момент импульса системы равен нулю, можно написать равенство или 0 = Ls 1 + L 0, Ls 1 = L 0, где L 0 – момент импульса, сообщаемый колесу. Когда студент сходит со скамьи, Ls обращается в нуль (момент импульса передается Земле). При возвращении студента на скамью и поворота колеса момент импульса остаётся равным L 0 = Ls 1 + ( L 0); Ls 1 = 2 L 0 Следовательно, студент начинает вращаться вдвое быстрее, чем первоначально, причем в противоположном направлении, так что 2 = 10 с 1.

6. 7. Вращение твердого тела вокруг неподвижной оси. Момент инерции Пусть частицы образуют твердое тело, способное вращаться вокруг некоторой оси. Найдем полный момент импульса тела относительно неподвижной оси. Пусть масса k й частицы равна mk, и она расположена на расстоянии rk от оси (Рис. 10). Рис. 10. Вращающийся диск (показан элемент массы mk), удаленный на расстояние rk от оси вращения

Момент импульса k й частицы равен Lk = mkvkrk. Поскольку vk = rk, то Lk = mkvkrk = Lk = mkrk 2. Полный момент количества движения тела равен сумме моментов количества движения всех частиц, образующих тело:

Вынося одинаковую для всех частиц системы угловую скорость за знак суммы и вводя обозначение I = mkrk 2, получаем L = I. Выражение L = I похоже на формулу для импульса р = mv в динамике поступательного движения. Скорость заменяется на угловую скорость, а масса на некую величину I, называемую моментом инерции. Момент инерции играет роль массы при вращении и служит мерой инерции во вращательном движении.

Величина I зависит не только от массы тела, но и от того, как масса распределена относительно оси вращения. Тело обладает моментом инерции независимо от того, вращается оно или нет. Между массой и моментом инерции имеется существенная разница – масса тела обычно не изменяется, тогда как момент инерции можно изменить перемещением масс относительно оси вращения.

Уравнение, описывающее вращение тела вокруг неподвижной оси, принимает вид M = d. L/dt = M = I , = d /dt, Или: d(I )/dt, Оно напоминает по форме второй закон Ньютона, где роль силы играет момент силы, линейное ускорение заменено на угловое, а мерой инертности тела служит момент инерции.

6. 8. Расчет моментов инерции Момент инерции тела относительно оси можно рассчитать или измерить. По определению имеем: Если вещество распределено в теле непрерывно, то, разбив тело на бесконечно малые элементы dmi(r), получим Интегрирование выполняется по всему объему.

Рассчитаем I стержня с массой M, длиной l c осью вращения, проходящей через конец стержня. Момент инерции, по определению, равен в одномерном случае: Рис. 11. Расчет момента инерции стержня относительно конца (а) и относительно центра масс (б)
 проходит через середину – центр масс стержня, параллельно оси (ОО’),")
Если ось (СС’) проходит через середину – центр масс стержня, параллельно оси (ОО’), то имеем: Причем оказывается, что I 0 и Iс связаны соотношением: I 0 = Ma 2 + Ic, где a = l/2 расстояние между осями (ОО’) и (СС’). То есть момент стержня относительно оси (ОО’) равен моменту инерции стержня относительно оси (СС’), проходящей через центр масс, плюс произведение массы стержня на квадрат расстояния между осями.

Это утверждение называется теоремой о параллельном переносе оси или теоремой Штейнера Моменты инерции некоторых распространенных тел (относительно указанных на рисунках осей) Обруч или кольцо Концентрическое кольцо с внешним радиусом R и внутренним r MR 2
 Стержень (относительно конца) Твердый шар Сферическая оболочка Диск (относительно края)")
Стержень (относительно середины) Стержень (относительно конца) Твердый шар Сферическая оболочка Диск (относительно края)

6. 9. Кинетическая энергия вращения Тело вращается вокруг оси со скоростью rk, где rk – расстояние до оси. Пусть масса частицы равна mk, то полная кинетическая энергия тела равна сумме кинетической энергии его частиц: Угловая скорость постоянна для всех точек, поэтому

Это выражение подобно выражению для кинетической энергии поступательного движения тела при формальной замене: m I, v . Воспользовавшись теоремой Штейнера, можно переписать выражение для кинетической энергии в виде K = (1/2) 2(IC + ma 2) = (1/2) 2 IC + (1/2)mv 2.

Кинетическая энергия представляет собой сумму кинетических энергий вращения тела относительно оси, проходящей через центр масс, плюс кинетическая энергия поступательного движения центра масс. Например, скорость центра масс обруча равна , масса обруча m. Определим его кинетическую энергию при движении по горизонтальной поверхности (рис. ). Имеем Kполн = (1/2)mv 2 + (1/2) 2 m, где – линейная скорость обода в системе ц. м.

Для наблюдателя, движущегося вместе с центром обруча, скорость точки соприкосновения обруча с плоскостью равна v. Поэтому = v. Таким образом, Kполн = (1/2)mv 2 + (1/2)mv 2 = mv 2. Рис. Обруч, катящийся по плоскости

6. 11. Гироскоп – быстро вращающееся симметричное твердое тело, ось вращения которого может изменять свое направление в пространстве. Название «гироскоп» происходит от греческого gyréuō – кружусь, вращаюсь, и skopéō – смотрю, наблюдаю. Гироскоп обладает уникальными свойствами, которые проявляются у вращающихся небесных тел, артиллерийских снарядов, роторов турбин, установленных на судах. На свойствах гироскопов основаны различные приборы и устройства, применяемые в современной технике.

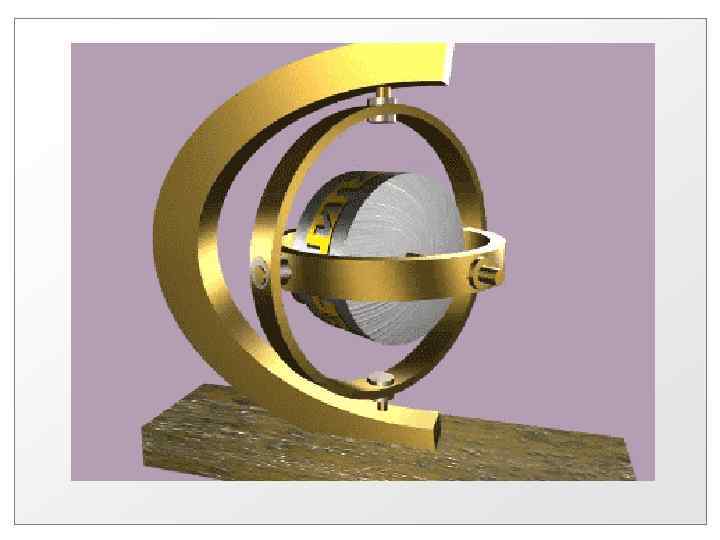
Свойства гироскопов реализуются при выполнении двух условий: 1. ось вращения гироскопа должна иметь возможность изменять свое положение в пространстве; 2. угловая скорость вращения гироскопа вокруг своей оси должна быть очень велика по сравнению со скоростью изменения направления оси в пространстве. Чтобы ось гироскопа могла свободно поворачиваться в пространстве, его обычно закрепляют на кольцах (карданов подвес) (рис. ), в котором оси внутренних и внешних колец и ось гироскопа пересекаются в одной точке, называемой центром подвеса.

Закрепленный в таком подвесе гироскоп имеет 3 степени свободы и может совершать любой поворот около центра подвеса. Рис. 13. Классический карданов подвес: а – внешнее кольцо; б – внутреннее кольцо; в – ротор

Пусть симметричное тело вращается с большой угловой скоростью вокруг оси y, и к оси гироскопа приложена пара сил F, перпендикулярная оси y и лежащая в плоскости xy (рис. 14). При этом возникает вращательный момент M, перпендикулярный плоскости xy. Рис. 14.

Поскольку d. L = Mdt, то изменение момента импульса L направлено параллельно вектору M. Ось гироскопа повернется вокруг оси х в направлении, перпендикулярном действию силы на угол d. Используя равенства d. L = L d и d. L = Mdt, получаем: M = L 0 d /dt = L 0 , где = d /dt –угловая скорость Учитывая направления векторов, имеем M = [ , L 0]. Это уравнение позволяет определить момент силы, который необходимо приложить, чтобы заставить гироскоп вращаться с угловой скоростью . Величина носит название угловой скорости прецессии, т. е. скорости вращения гироскопа относительно оси x.

Если к оси гироскопа приложена сила с моментом М, то угловая скорость прецессии равна = M/(Lsin ) = M/(I sin ), где угол между направлениями вектора силы F и вектором L 0, I – момент инерции гироскопа относительно оси y, угловая скорость собственного вращения гироскопа вокруг оси y, M – момент силы F относительно центра О. Из формулы следует, что скорость прецессии тем медленнее, чем больше величина I , называемая собственным кинетическим моментом гироскопа или моментом количества движения.
 возможна лишь при действии момента сил на ось гироскопа")
Прецессия гироскопа ( 0) возможна лишь при действии момента сил на ось гироскопа (M 0) , при этом происходит отклонение оси на угол = (M/L 0) t. Вращение прекратится, как только исчезнет силовое воздействие на ось гироскопа М = 0. Этим гироскоп принципиально отличается от не вращающегося тела. Не вращающееся тело под влиянием приложенного момента начинает ускоренно вращаться, и это вращение будет происходить с достигнутой скоростью бесконечно долго и после прекращения действия момента – закон сохранения момента импульса.

Гироскоп начинает вращаться с постоянной угловой скоростью сразу после приложения момента силы M и останавливается немедленно после прекращения действия момента силы. Пример прецессионного вращения дает артиллерийский снаряд. Если снаряд не вращается вокруг собственной оси, то под действием силы сопротивления воздуха он начинает кувыркаться. Вращающийся вокруг оси снаряд обладает всеми свойствами гироскопа, Вращение снаряду придают специальные направляющие в стволе орудия нарезные стволы.

Если гироскоп находится в кардановом подвесе, то он имеет три степени свободы. Гироскоп на кардановом подвесе не испытывает действия момента в результате вращения Земли или в результате движения самолета, в котором он находится. Поэтому ось вращающегося тела будет сохранять определенное направление в пространстве. Если эту ось направить на звезду, то при любых перемещениях прибора и толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно осей, связанных с Землей.

На морских судах и самолетах имеется много вращающихся частей: вал двигателя, ротор турбины, гребные и воздушные винты и т. д. При разворотах судна, качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы, и их необходимо учитывать при соответствующих инженерных расчетах, чтобы избежать катастрофы.

Гироскопы в технике. Важнейшими навигационными устройствами являются гирокомпас и гирогоризонт. Гирокомпас, указывающий направление истинного меридиана, предназначается для определения курса движущегося объекта. В отличие от магнитного компаса он указывает истинный, а не магнитный меридиан, и на его показания не влияют металлические массы и магнитные поля.

Гирогоризонт определяет направление истинной плоскости горизонта и отклонения движущегося объекта от этой плоскости. Гироскопические устройства обеспечивают автоматическое управление и стабилизацию полетательного аппарата.

Современная техника требует от многих гироскопических устройств очень высокой точности. Например, у некоторых приборов при массе ротора порядка 1 кг для обеспечения нужной точности смещение центра тяжести от центра подвеса не должны превышать долей микрона, иначе момент силы тяжести вызовет нежелательную прецессию (уход) оси гироскопа.

На точность показаний приборов с гироскопом влияет трение осей в кардановом подвесе. Решение указанных проблем привело к разработке гироскопов, основанных на других физических принципах, например квантовых гироскопов.

На кораблях устанавливаются гироскопические успокоители качки, которые представляют собой большие быстро вращающиеся маховики, дающие при колебаниях гироскопическую силу, в значительной степени ослабляющую колебания всего корабля. При колебаниях мотор вызывает вращение оси волчка в нужном направлении, вследствие этого момент гироскопических сил, действую щих на опоры маховика, противодействует колебаниям корабля.

На самолете гироскопы употребляются в различных устройствах, например в приборе, показывающем истинное положение самолета относительно горизонта искусственный горизонт, и в автопилотах. Автопилот представляет собой комбинацию целого ряда приборов, автоматически обеспечивающих определенный курс полета и нормальное положение машины относительно горизонта.

Основные выводы Вращательное движение макроскопических тел подчиняется законам Ньютона, и наблюдаемые новые явления при вращении тел являются их прямым следствием. Для описания вращательного движения тел вводятся момент силы M, момент количества движения (импульса) L, момент инерции I.
 относительно центра О, является момент силы,")
Причиной изменения состояния вращения материальной точки (k) относительно центра О, является момент силы, равный векторному произведению силы F, приложенной к точке, на радиус вектор точки r: Mk = [rk, Fk].

Для системы материальных точек – момент равен сумме моментов от всех внешних сил. Момент импульса L материальной точки k, относительно точки О, определяется как Lk = [rk, Pk], где Pk = mkvk – импульс частицы. Под действием момента силы M изменяется момент импульса L.

Динамический закон вращения напоминает закон Ньютона по форме M = d. L/dt. Если полный момент всех внешних сил равен нулю , то момент импульса остается постоянным L = const – закон сохранения момента импульса. Этот закон является следствием изотропности пространства, т. е. независимости свойств пространства от направления.

Мерой инертности тела во вращательном движении служит момент инерции где r – расстояние до оси вращения от точечной массы mi или dm(r). При вращении вокруг неподвижной оси M = I , где – угловое ускорение.

Если твердое тело покоится или вращается вокруг фиксированной оси с постоянной угловой скоростью , то должны выполняться условия равенства нулю равнодействующих всех внешних сил и моментов: Fi = 0, Mi = 0. Из этих условий можно определить точку приложения, величину и направление силы, необходимой для уравновешивания тела.

Лекция окончена Нажмите клавишу <ESC> для выхода
 совершается")
При плоском повороте тела на угол d под действием силы F(Fx, Fy) совершается элементарная работа, равная A = (F, dr) = Fxdx + Fydy = (x. Fy y. Fx)d. В двумерном случае работа пропорциональна углу d поворота, умноженному на величину M = x. Fy – y. Fx, получившую название момента силы.

Если на тело действует несколько сил, тогда элементарная работа равна сумме работ, совершаемой каждой силой: M d Закон сложения моментов, как скалярных величин, справедлив для случая плоского вращения: векторы d = dt и Mk – параллельны и направлены перпендикулярно плоскости xy.

Полученное выражение для элементарной работы показывает, что для нахождения твердого тела в состоянии равновесия необходимо выполнение следующих условий: 1. Геометрическая сумма всех внешних сил должна быть равна нулю тогда центр масс тела не будет перемещаться. 2. Сумма всех моментов сил должна быть равна нулю тогда не совершается работа по изменению состояния вращения тела.

Геометрически условие А = Md означает: работа по перемещению тела равна тангенциальной составляющей силы в направлении перемещения Ft, умноженной на перемещение rd (рис. 6. 2) A = rd |F| sin = Ft rd ,
Лекция 4 Динамика вращательного движения.ppt