3 экскаваторы.pptx
- Количество слайдов: 24


 и перемещения грунта или")
самоходная землеройная машина, имеющая рабочее оборудование для механического отрыва (экскавации) и перемещения грунта или породы. Экскаватор Назначение экскаваторов - разработка карьеров, котлованов, выполнение вскрышных работ, в строительстве и т. п. Большинство экскаваторов являются высокопроизводительным и и совершенными средствами механизации П Р при вывозе грунта автомобильным транспортом. При использовании экскаваторов в сочетании с автосамосвалами обеспечивается комплексная механизация разработки и транспортирования грунта.

Экскаватор Строительные и строительнокарьерные (масса машин от 2 до 250 т, объем ковша 0, 1 -6, 0 м 3 ) универсальные машины, используемые в основном для выполнения земляных и погрузочных работ в строительстве; карьерные (масса машин 75 -1000 т, объем ковша 2 -20 м 3), применяются для работы в карьерах и также при гидротехническом строительстве во взаимодействии с ТС; вскрышные (масса экскаваторов от 170 до 13000 т, объем ковша от 4 до 160 м 3) - для выемки грунтов, закрывающих полезные ископаемые, или на открытых горных работах и в гидротехническом строительстве; туннельные и шахтные с укороченным рабочим оборудованием (эксплуатационная масса машин 16 -30 т, вместимость ковша 0, 5 -1, 0 м 3) - для работы под землей при строительстве различных инженерных сооружений и разработке полезных ископаемых; шагающие с объемом ковша от 4 до 25 м 3 и удлинением стрелы (до 100 м), предназначенные для разработки уступов на карьерах с перемещением грунта или породы 2 в отвал, проходки траншей, котлованов, насыпи дамб, плотин и т. д.

Самые большие в мире экскаваторы

Одноковшовые экскаваторы, приспособленные для установки различных рабочих органов (ковш, грейфер, крюк и т. д. ), являются универсальными (свыше 90 % выпускаемых экскаваторов). Экскаваторы, оснащенные только одним видом рабочего оборудования для земляных или погрузочных работ, относят к категории специальных.

Экскаваторы. Классификация. По типу двигателя: электрические, дизельные и дизель-электрические. По числу установленных двигателей: одномоторные и многомоторные. По возможности вращения поворотной части (платформы): • полноповоротными (платформа поворачивается вокруг вертикальной оси неограниченный угол), • неполноповоротными. По ходовому оборудованию: 1. гусеничные; 2. пневмоколесные; 3. на специальном шасси (автомобильного типа); 4. на базе самоходной машины (навесной) (ходовое устройство на базе трактора или автомобиля); 5. шагающие (экскаватор движется с минимальной скоростью на двух опорных лыжах); 6. понтонные и амфибии. По типу подвески рабочего оборудования: с гибкой (канатной) и жесткой подвесками (гидравлические цилиндры). 5 на

Одноковшовый полноповоротный экскаватор 6

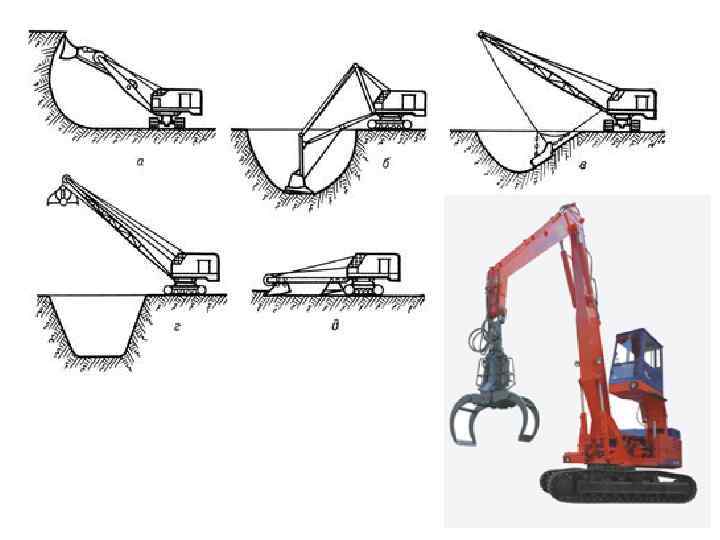
Классификация в зависимости от способа закрепления ковша на стреле с рабочим органом "прямая лопата" (применяют в карьерах и для разработки забоев, расположенных выше того уровня, на котором находятся сами экскаваторы); с рабочим органом "драглайн" (объем ковша от 0, 15 до 53 м 3); с грейферным захватом; с рабочим органом "обратная лопата» (объемом ковша от 0, 15 до 1 м 3, используют для разработки котлованов, проходки траншей, дренажных канав и т. д. )

Схемы рабочего оборудования одноковшовых экскаваторов а, б- прямая и обратная лопата соответственно; в - драглайн; г - грейфер 8


Выпускаются и многоковшовые, но они встречаются значительно реже. Данный тип экскаваторов предназначен преимущественно для проходки траншей и относится к категории специальных. В качестве рабочего органа у многоковшовых экскаваторов являются ковши, постоянно закрепленные на бесконечной приводной цепи.

САМОХОДНЫЕ ПОГРУЗЧИКИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ Самоходные погрузчики непрерывного действия или погрузчики конвейерного типа предназначены для механизации ПРР с навалочными грузами на складах и различных перегрузочных пунктах, в строительстве, сельском и коммунальном хозяйстве.
 специальными погрузочными")
САМОХОДНЫЕ ПОГРУЗЧИКИ НЕПРЕРЫВНОГО ДЕЙСТВИЯ Отличие: они сами захватывают груз из штабеля (навала) специальными погрузочными органами и транспортируют его к месту разгрузки непрерывным потоком. Для достижения маневренности погрузочные машины выполняют самоходными на пневмоколесном, гусеничном или колеснорельсовом шасси.

Схема самоходного погрузчика непрерывного действия 1 - питатель; 2 - приемный конвейер; 3 - кабина; 4 погрузочный конвейер; 5 - силовая часть 14

Основными частями погрузчиков являются: 1. питатель, предназначенный для захвата груза из штабеля; 2. транспортирующий передаточный орган, (применяют ленточные, скребковые и пластинчатые конвейеры, устанавливают последовательно один или два конвейера, в редких случаях - три); 3. самоходное ходовое устройство (шасси); 4. силовая часть (двигатель с трансмиссией); 5. кабина управления. Встречаются также самоходные погрузчики непрерывного действия без погрузочного конвейера. Они проще по конструкции, но менее удобны в эксплуатации, так как высота разгрузки в этих машинах обычно не регулируется.

Погрузчики с роторным питателем Погрузчик многоковшовый 16

Погрузчик КПШ-5: 1 - самоходное шасси; 2 - механизм поворота конвейера; 3 - редуктор: 4 -элеватор; 5 - механизм подъема элеватора; 6 - выравниватель; 7 - механизм подъема конвейера; 8 - гидросистема; 9 - капот Погрузчики непрерывного действия отличаются высокой производительностью и простотой 17 обслуживания.

Погрузчик Д-565: 1 - ковшовый элеватор; 2 ленточный конвейер; 3 - самоходная тележка; 4 подгребающие шнеки; 5 - гидросистема; 6 - шкаф электроаппаратуры 18

Манипулятор - это механизм, содержащий рабочий орган, предназначенный для имитации двигательных функций руки человека в технологическом процессе при перемещении объектов в пространстве, и дистанционно управляемый оператором или действующий автоматически. Роботом называют универсальный автомат, способный имитировать двигательные и умственные функции человека, посредством программы настраиваться и адаптироваться к окружающей среде. Робот от простого автомата отличает наличие универсального рабочего органа и возможность легкой перенастройки на выполнение другой работы. 19

По уровню управления манипуляторы подразделяются: 1. системы с ручным и дистанционным управлением; 2. с автоматизированным и автоматическим управлением (промышленные роботы). Промышленные роботы относятся к классу машин, оснащенных манипуляторами. 20

Манипуляторы с ручным и дистанционным управлением подразделяются на: Шарнирно-балансирный манипулятор это машина с многозвенным механизмом и приводами на каждой подвижной паре. Экзоскелетоны - машины с многозвенными механизмами, звенья которых непосредственно сочленены с руками, ногами человека, они увеличивают силу человека и позволяют перемещать грузы значительной массы. Промышленный робот - это автоматическая машина, состоящая из манипулятора и перепрограммируемого устройства управления для выполнения двигательных и управляющих функций.

программные, адаптивные, "интеллектуальные" программные роботы с легко переналаживаемой системой управления, но программа действия не изменяется в процессе работы. Эти роботы можно применять на стыке технологических линий со складами в процессе образования пакетов из одинаковых предметов (автоматизированные стеллажные склады с кранами-штабелерами). После изменения программы робот может выполнять другую совокупность операций. адаптивные роботы с сенсорным обеспечением, реагирующие на изменения внешней среды и корректирующие программу своей работы в соответствии с этими изменениями. Эти роботы могут обеспечивать заданное усилие зажатия груза, обеспечивать разные ритмы торможения. Для этого роботы снабжены системой сбора и обработки информации, поступающей от датчиков (силовых, тактильных, световых, ультразвуковых, тепловизионных и др. ). "интеллектуальные" (интегральные) роботы, обладающие элементами искусственного интеллекта. Эти роботы могут воспринимать изменяющуюся форму груза, его место и принимать решение о способах его захвата и переноски. Оснащаются современной микропроцессорной техникой, 22 специальными навигационными и телекоммуникационными системами, соответствующими PGM.

По выполняемым технологическим функциям: транспортные - могут не только двигаться по заданной трассе, но и останавливаться в запрограммированных местах для приемки или отдачи груза; манипуляционные - предназначены для выполнения погрузочно-разгрузочных и перегрузочных операций; информационные и управляющие - производят автоматический сбор, обработку, передачу информации и использование ее для выработки управляющих сигналов, управляют группами роботов, работающих в единой технологии.

Перегрузочный манипулятор: а - сбалансированный с пневмоприсосками; б - с копирующим управлением когда человек находится в зоне действия захватного при перегрузке более удобны - ими органа манипулятора, более удобными оказываются можно перегружать различные сбалансированные манипуляторы с пультом грузы из штабеля на поддоны, с управления, расположенным на этом органе (а), поддона в ТС и обратно (б), tп-р работа производится за счет усилий рабочего, манипулятором в 2 раза меньше, которые в связи с уравновешенностью системы не чем краном превышают 5 -7 % силы тяжести груза 24
3 экскаваторы.pptx