

Лекция 1. Кинематика.ppt
- Количество слайдов: 30
 Рекомендуемая литература в 1 семестре 1. И. В. Савельев «Курс общей физики» Том 1 -2. 2. Т. И. Трофимова «Курс физики» . 3. А. С. Уколов. Лекции по общему курсу физики. ч. 1 -3. Таганрог. 4. Учебные и методические мат-лы каф физики. 1. А. А. Детлаф, Б. М. Яворский «Курс физики» . 2. Д. В. Сивухин «Общий курс физики» Том 1, 2, 3. 3. «Берклеевский курс физики» (по разделам). 1. СБОРНИК вопросов, упражнений и задач по дисц. «Физика» , ч. 1, № 2616 -1, изд. 3 -е, Таганрог. 2007. 2. МЕТОДИЧЕСКОЕ ПОСОБИЕ к решению задач по курсу физики, ч. 1, № 3126 -1, Таганрог, 2002.
Рекомендуемая литература в 1 семестре 1. И. В. Савельев «Курс общей физики» Том 1 -2. 2. Т. И. Трофимова «Курс физики» . 3. А. С. Уколов. Лекции по общему курсу физики. ч. 1 -3. Таганрог. 4. Учебные и методические мат-лы каф физики. 1. А. А. Детлаф, Б. М. Яворский «Курс физики» . 2. Д. В. Сивухин «Общий курс физики» Том 1, 2, 3. 3. «Берклеевский курс физики» (по разделам). 1. СБОРНИК вопросов, упражнений и задач по дисц. «Физика» , ч. 1, № 2616 -1, изд. 3 -е, Таганрог. 2007. 2. МЕТОДИЧЕСКОЕ ПОСОБИЕ к решению задач по курсу физики, ч. 1, № 3126 -1, Таганрог, 2002.
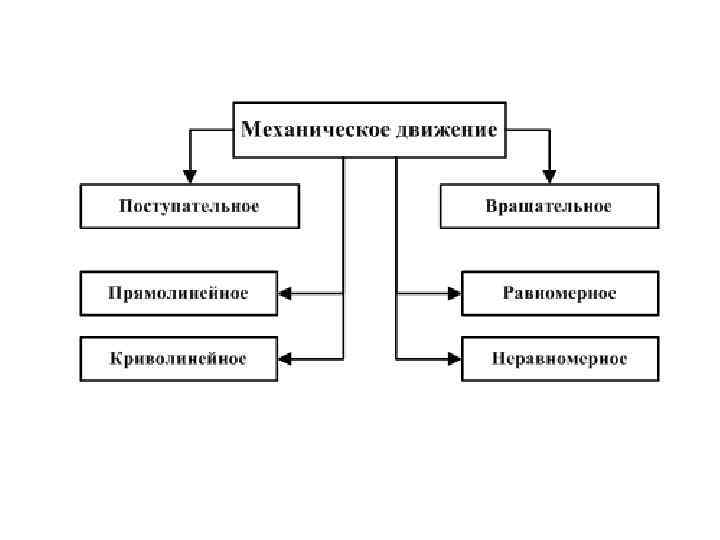
 Механика Содержание лекции 1 1. КИНЕМАТИКА 1. 1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ 1. 2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ. 1. 3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗНЫ ПЛОСКОЙ ТРАЕКТОРИИ.
Механика Содержание лекции 1 1. КИНЕМАТИКА 1. 1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ 1. 2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ. 1. 3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗНЫ ПЛОСКОЙ ТРАЕКТОРИИ.
. Падение капли воды.") Необходимость применения физических моделей (Например, модели материальной точки). Падение капли воды.
Необходимость применения физических моделей (Например, модели материальной точки). Падение капли воды.
 Буравчик
Буравчик
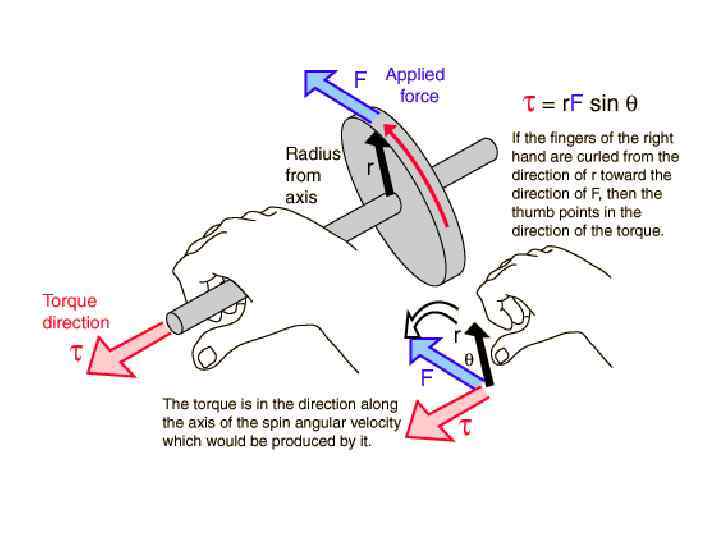
 Векторное произведение Направление векторного произведения находится по правилу правого винта: головку винта располагают в плоскости векторов и и вращают ее в направлении от первого вектора ко второму в сторону меньшего угла между ними. Винт пойдет в направлении вектора.
Векторное произведение Направление векторного произведения находится по правилу правого винта: головку винта располагают в плоскости векторов и и вращают ее в направлении от первого вектора ко второму в сторону меньшего угла между ними. Винт пойдет в направлении вектора.
 Скалярное произведение
Скалярное произведение
 1. КИНЕМАТИКА 1. 1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ Кинематикой называют раздел механики, изучающий способы (не причины!) описания движений и связь между величинами, характеризующими эти движения. МОДЕЛИ МЕХАНИЧЕСКИХ СИСТЕМ: Материальная точка (МТ) – любой объект, формой и размерами которого в данной задаче (в данных условиях) можно пренебречь; Набор конечного числа материальных точек – достаточно общая модель произвольной механической системы. Абсолютно твёрдое тело (АТТ) – тело, форма и размеры которого при наличии тех воздействий, что описаны в условиях задачи, могут считаться неизменными. АТТ можно рассматривать как набор материальных точек с неизменными расстояниями между ними. Тело отсчёта, жёстко связанная с ним система координат и часы образуют систему отсчёта (СО).
1. КИНЕМАТИКА 1. 1 ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ Кинематикой называют раздел механики, изучающий способы (не причины!) описания движений и связь между величинами, характеризующими эти движения. МОДЕЛИ МЕХАНИЧЕСКИХ СИСТЕМ: Материальная точка (МТ) – любой объект, формой и размерами которого в данной задаче (в данных условиях) можно пренебречь; Набор конечного числа материальных точек – достаточно общая модель произвольной механической системы. Абсолютно твёрдое тело (АТТ) – тело, форма и размеры которого при наличии тех воздействий, что описаны в условиях задачи, могут считаться неизменными. АТТ можно рассматривать как набор материальных точек с неизменными расстояниями между ними. Тело отсчёта, жёстко связанная с ним система координат и часы образуют систему отсчёта (СО).
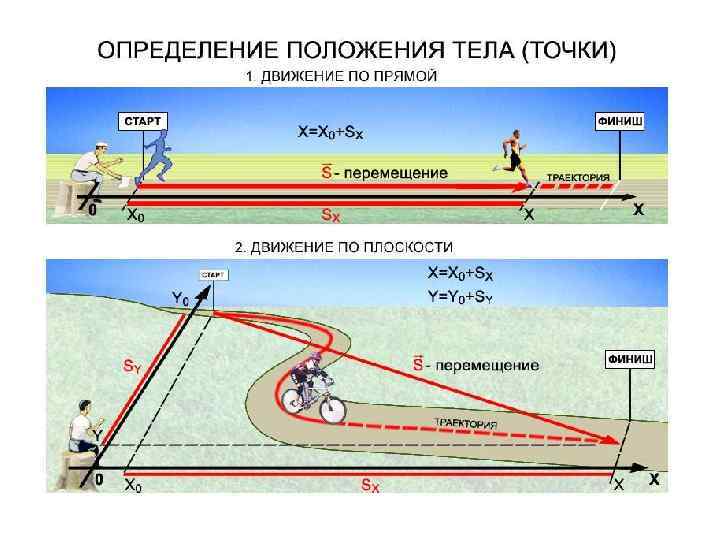
; K – название системы отсчёта. Положение МТ в") О – начало координат (начало отсчёта); K – название системы отсчёта. Положение МТ в пространстве в определённый момент времени задаётся тремя её координатами (например, декартовыми, ) или радиус-вектором : , , . (1. 1) При движении МТ её координаты становятся функциями времени: , , . (1. 2 а, б, в) Аналогично, . (1. 3) Закон движения МТ– правило, по которому можно определить её положение в любой момент времени. P. S. Закон движения (1. 2 а, б, в) можно рассматривать как уравнения траектории, заданной в параметрическом виде (в роли параметра t).
О – начало координат (начало отсчёта); K – название системы отсчёта. Положение МТ в пространстве в определённый момент времени задаётся тремя её координатами (например, декартовыми, ) или радиус-вектором : , , . (1. 1) При движении МТ её координаты становятся функциями времени: , , . (1. 2 а, б, в) Аналогично, . (1. 3) Закон движения МТ– правило, по которому можно определить её положение в любой момент времени. P. S. Закон движения (1. 2 а, б, в) можно рассматривать как уравнения траектории, заданной в параметрическом виде (в роли параметра t).
 – радиус-вектор в момент , – перемещение за") ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m) – радиус-вектор в момент , – перемещение за промежуток времени , – путь за (длина отрезка траектории), – мгновенная скорость в момент времени , – мгновенная скорость в момент t 2.
ОСНОВНЫЕ ВЕЛИЧИНЫ, ОПИСЫВАЮЩИЕ ДВИЖЕНИЕ МТ (m) – радиус-вектор в момент , – перемещение за промежуток времени , – путь за (длина отрезка траектории), – мгновенная скорость в момент времени , – мгновенная скорость в момент t 2.
") PS. Векторы скорости Очевидно: и – касательные к траектории. . При малых (1. 4) очевидно, что. (1. 5) Средняя скорость. (1. 6) Мгновенная скорость. (1. 7 а) PS. Другой вид математической записи ( «точка» обозначает производную по времени). (1. 7 б) Средняя путевая скорость , (1. 8) – путь, пройденный за . При получаем:
PS. Векторы скорости Очевидно: и – касательные к траектории. . При малых (1. 4) очевидно, что. (1. 5) Средняя скорость. (1. 6) Мгновенная скорость. (1. 7 а) PS. Другой вид математической записи ( «точка» обозначает производную по времени). (1. 7 б) Средняя путевая скорость , (1. 8) – путь, пройденный за . При получаем:
: . (1. 9) Или. (1. 10) Из (1. 5),") Мгновенная путевая скорость (при ): . (1. 9) Или. (1. 10) Из (1. 5), (1. 6), (1. 7 а), (1. 8) и (1. 9), следует, что мгновенная путевая скорость совпадает с модулем вектора мгновенной скорости (подумать!): . (1. 11) Среднее ускорение за промежуток времени : . (1. 12) . (1. 13) . (1. 14) Мгновенное ускорение (в момент ) : Очевидно: PS. 1 Если закон движения задан, например, известна зависимость , то мы имеем о движении полную информацию, и все величины, определённые равенствами (1. 6) – (1. 14) легко вычисляются, точно так же, как и их проекции на декартовы оси. PS. 2 Переход и выполняется с помощью дифференцирования.
Мгновенная путевая скорость (при ): . (1. 9) Или. (1. 10) Из (1. 5), (1. 6), (1. 7 а), (1. 8) и (1. 9), следует, что мгновенная путевая скорость совпадает с модулем вектора мгновенной скорости (подумать!): . (1. 11) Среднее ускорение за промежуток времени : . (1. 12) . (1. 13) . (1. 14) Мгновенное ускорение (в момент ) : Очевидно: PS. 1 Если закон движения задан, например, известна зависимость , то мы имеем о движении полную информацию, и все величины, определённые равенствами (1. 6) – (1. 14) легко вычисляются, точно так же, как и их проекции на декартовы оси. PS. 2 Переход и выполняется с помощью дифференцирования.
 Обратно: Чтобы найти , выполняется с помощью интегрирования. по заданной , необходимо знать начальное значение. (1. 15) Аналогично: . Пример 1. Пусть МТ движется с (1. 16) . Тогда с помощью (1. 16) можно найти. (1. 17) Интегрируя ещё раз, получаем закон движения: . (1. 18) Эти равенства связывают кинематические величины в общем случае, т. е. при произвольном движении МТ. Пример 2. (из школьной жизни!). Прямолинейное равноускоренное движение. Очевидно, что (1. 19) ;
Обратно: Чтобы найти , выполняется с помощью интегрирования. по заданной , необходимо знать начальное значение. (1. 15) Аналогично: . Пример 1. Пусть МТ движется с (1. 16) . Тогда с помощью (1. 16) можно найти. (1. 17) Интегрируя ещё раз, получаем закон движения: . (1. 18) Эти равенства связывают кинематические величины в общем случае, т. е. при произвольном движении МТ. Пример 2. (из школьной жизни!). Прямолинейное равноускоренное движение. Очевидно, что (1. 19) ;
 Векторные равенства можно записать в проекциях на оси координат: , , (1. 20 а, б) , , (1. 21 а, б) , (1. 22) (1. 23) и т. д.
Векторные равенства можно записать в проекциях на оси координат: , , (1. 20 а, б) , , (1. 21 а, б) , (1. 22) (1. 23) и т. д.
 1. 2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ. Итак . Очевидно, при криволинейном движении ускорение материальной точки отлично от нуля, т. к. вектор скорости изменяется по величине и по направлению. Представим вектор скорости МТ в виде (1. 24) где. (1. 25) т. е. – единичный вектор, направленный по скорости Продифференцируем уравнение (1. 24), : . . (1. 26) , (1. 27). (1. 28) Обозначим:
1. 2. КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ НА ПЛОСКОСТИ. УСКОРЕНИЕ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ: ТАНГЕНЦИАЛЬНОЕ И НОРМАЛЬНОЕ УСКОРЕНИЯ. Итак . Очевидно, при криволинейном движении ускорение материальной точки отлично от нуля, т. к. вектор скорости изменяется по величине и по направлению. Представим вектор скорости МТ в виде (1. 24) где. (1. 25) т. е. – единичный вектор, направленный по скорости Продифференцируем уравнение (1. 24), : . . (1. 26) , (1. 27). (1. 28) Обозначим:
 ускорение: Второе слагаемое - . (1. 29) –") Тогда: Первое слагаемое в (1. 29) ускорение: Второе слагаемое - . (1. 29) – касательное или тангенциальное при , при. называется нормальной составляющей, (1. 30 а) (1. 30 б) она нормальна, т. е. перпендикулярна, к вектору скорости (см. ниже!).
Тогда: Первое слагаемое в (1. 29) ускорение: Второе слагаемое - . (1. 29) – касательное или тангенциальное при , при. называется нормальной составляющей, (1. 30 а) (1. 30 б) она нормальна, т. е. перпендикулярна, к вектору скорости (см. ниже!).
 .") Можно считать: . Рассматривая этот треугольник как бесконечно малый сектор, имеем (1. 31) . Но (1. 32) . (1. 33) . Отсюда
Можно считать: . Рассматривая этот треугольник как бесконечно малый сектор, имеем (1. 31) . Но (1. 32) . (1. 33) . Отсюда
 Если ввести бесконечно малый вектор поворота , направление которого указано на рисунке 1. 4 – «к нам» , – то будем иметь с учётом (1. 31) и (1. 33): (1. 34) Таким образом, (см. (1. 31), (1. 28)), (1. 35) Следовательно, равенство (1. 29) – разложение вектора ускорения на две взаимно перпендикулярные составляющие. Далее, можно представить в виде (1. 36) Направления , , в случае показаны на рисунке 1. 5.
Если ввести бесконечно малый вектор поворота , направление которого указано на рисунке 1. 4 – «к нам» , – то будем иметь с учётом (1. 31) и (1. 33): (1. 34) Таким образом, (см. (1. 31), (1. 28)), (1. 35) Следовательно, равенство (1. 29) – разложение вектора ускорения на две взаимно перпендикулярные составляющие. Далее, можно представить в виде (1. 36) Направления , , в случае показаны на рисунке 1. 5.
 называется вектором") Если считать малый отрезок криволинейной траектории частью окружности, то величина (1. 37) называется вектором угловой скорости. Вектор определяет как направление поворота, так и величину угла поворота радиуса-вектора за единицу времени. Направление движения МТ по окружности и направление связаны правилом буравчика.
Если считать малый отрезок криволинейной траектории частью окружности, то величина (1. 37) называется вектором угловой скорости. Вектор определяет как направление поворота, так и величину угла поворота радиуса-вектора за единицу времени. Направление движения МТ по окружности и направление связаны правилом буравчика.
 Вращательное движение - это движение, когда все точки твердого тела движутся по окружностям. При этом центры этих окружностей лежат на одной прямой, которая называется осью вращения. Ось вращения может пронизывать тело (рис а) ) или находиться вне тела (рис б)). Особенностью вращательного движения является то, что все точки тела в любой момент времени t имеют относительно оси вращения одинаковые угловые скорости ω и угловые ускорения ε. Произвольное движение твердого тела можно представить в виде наложения поступательного и вращательного движений.
Вращательное движение - это движение, когда все точки твердого тела движутся по окружностям. При этом центры этих окружностей лежат на одной прямой, которая называется осью вращения. Ось вращения может пронизывать тело (рис а) ) или находиться вне тела (рис б)). Особенностью вращательного движения является то, что все точки тела в любой момент времени t имеют относительно оси вращения одинаковые угловые скорости ω и угловые ускорения ε. Произвольное движение твердого тела можно представить в виде наложения поступательного и вращательного движений.
 При вращении материальной точки вокруг неподвижной оси угловое ускорение ε направлено вдоль этой оси. Для сравнения: при ускоренном поступательном движении
При вращении материальной точки вокруг неподвижной оси угловое ускорение ε направлено вдоль этой оси. Для сравнения: при ускоренном поступательном движении
 1. 3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗНЫ ПЛОСКОЙ ТРАЕКТОРИИ. Рассмотрим окружность радиуса r , по которой движется материальная точка (рис. 1. 6). PS. . Придвижениипротивчасовойстрелкинаправлена «к нам» , по часовой – «от нас» . За время dt радиус-вектор изменится на : от значения до значения. Используя аналогию треугольников, построенных из векторов, которые показаны на рис. 1. 4 и 1. 6, нетрудно получить равенство, аналогичное соотношению (1. 34): . (1. 40)
1. 3 НЕРАВНОМЕРНОЕ ДВИЖЕНИЕ ПО ОКРУЖНОСТИ. УГЛОВАЯ СКОРОСТЬ И УГЛОВОЕ УСКОРЕНИЕ. СВЯЗЬ МЕЖДУ ЛИНЕЙНЫМИ И УГЛОВЫМИ ВЕЛИЧИНАМИ. РАДИУС КРИВИЗНЫ ПЛОСКОЙ ТРАЕКТОРИИ. Рассмотрим окружность радиуса r , по которой движется материальная точка (рис. 1. 6). PS. . Придвижениипротивчасовойстрелкинаправлена «к нам» , по часовой – «от нас» . За время dt радиус-вектор изменится на : от значения до значения. Используя аналогию треугольников, построенных из векторов, которые показаны на рис. 1. 4 и 1. 6, нетрудно получить равенство, аналогичное соотношению (1. 34): . (1. 40)
 на , будем иметь. (1. 41) Дифференцируя (1. 41),") Поделив обе части (1. 40) на , будем иметь. (1. 41) Дифференцируя (1. 41), находим ускорение: (1. 42) Второе слагаемое в (1. 42) ( см. (1. 36) ) есть нормальное ускорение: . . Тогда первое, очевидно, равно (1. 43) (1. 44) : Введём новое определение: угловым ускорением МТ назовём величину . (1. 45)
Поделив обе части (1. 40) на , будем иметь. (1. 41) Дифференцируя (1. 41), находим ускорение: (1. 42) Второе слагаемое в (1. 42) ( см. (1. 36) ) есть нормальное ускорение: . . Тогда первое, очевидно, равно (1. 43) (1. 44) : Введём новое определение: угловым ускорением МТ назовём величину . (1. 45)
 в виде. (1. 46) Двойное векторное") Теперь ускорение её запишется с учётом (1. 41) в виде. (1. 46) Двойное векторное произведение в (1. 46) вычислим по известной математической формуле , (1. 47) что даёт. Учитывая, что (1. 48) , получаем: . (1. 49) Таким образом, в разложении (1. 29) слагаемые имеют вид: , . (1. 50 а, б) Очевидно, нормальная составляющая ускорения – это хорошо известно из школьного курса центростремительное ускорение. Ускорение материальной точки , движущейся по окружности, называют также полным ускорением.
Теперь ускорение её запишется с учётом (1. 41) в виде. (1. 46) Двойное векторное произведение в (1. 46) вычислим по известной математической формуле , (1. 47) что даёт. Учитывая, что (1. 48) , получаем: . (1. 49) Таким образом, в разложении (1. 29) слагаемые имеют вид: , . (1. 50 а, б) Очевидно, нормальная составляющая ускорения – это хорошо известно из школьного курса центростремительное ускорение. Ускорение материальной точки , движущейся по окружности, называют также полным ускорением.
.") Рассмотрим аналогию между ускоренными прямолинейным и криволинейным движениями (на примере МТ, движущейся по окружности). Ось OZ направлена «к нам» , – единичный вектор, указывающий направление отсчёта положительных углов, которое связано с направлением OZ правилом буравчика. Для движения вдоль оси OX имеем , . (1. 51 а, б)
Рассмотрим аналогию между ускоренными прямолинейным и криволинейным движениями (на примере МТ, движущейся по окружности). Ось OZ направлена «к нам» , – единичный вектор, указывающий направление отсчёта положительных углов, которое связано с направлением OZ правилом буравчика. Для движения вдоль оси OX имеем , . (1. 51 а, б)
 Равнопеременное движение вдоль оси") Для движения по окружности: , . (1. 52 а, б) Равнопеременное движение вдоль оси описывается равенствами: , (1. 53 а) , (1. 53 б) , . Равнопеременное движение по окружности: , , , где , – угловое перемещение материальной точки. (1. 53 в) (1. 53 г) (1. 54 а) (1. 54 б) (1. 54 в) (1. 54 г)
Для движения по окружности: , . (1. 52 а, б) Равнопеременное движение вдоль оси описывается равенствами: , (1. 53 а) , (1. 53 б) , . Равнопеременное движение по окружности: , , , где , – угловое перемещение материальной точки. (1. 53 в) (1. 53 г) (1. 54 а) (1. 54 б) (1. 54 в) (1. 54 г)
 Таблица соответствия линейных и угловых величин линейные угловые Уравнения, связывающие линейные и угловые переменные, характеризующие движение МТ по окружности : , ; (1. 55 а, б) , , ; (1. 56 а, б, в) , , ; (1. 57 а, б, в) Здесь – проекции скорости и ускорения на вектор , ; (1. 58 а, б) , . (1. 59 а, б) Малую окрестность точки плоской криволинейной траектории материальной точки можно рассматривать как малую дугу некоторой окружности. Радиус этой окружности – радиус кривизны траектории в окрестности данной точки, . Эта величина удовлетворяет равенству аналогичному (1. 59 б). . (1. 60)
Таблица соответствия линейных и угловых величин линейные угловые Уравнения, связывающие линейные и угловые переменные, характеризующие движение МТ по окружности : , ; (1. 55 а, б) , , ; (1. 56 а, б, в) , , ; (1. 57 а, б, в) Здесь – проекции скорости и ускорения на вектор , ; (1. 58 а, б) , . (1. 59 а, б) Малую окрестность точки плоской криволинейной траектории материальной точки можно рассматривать как малую дугу некоторой окружности. Радиус этой окружности – радиус кривизны траектории в окрестности данной точки, . Эта величина удовлетворяет равенству аналогичному (1. 59 б). . (1. 60)
 Тренировочные вопросы по теме «кинематика» 1. Выберите вид движения материальной точки (равномерное прямолинейное, равноускоренное прямолинейное, равномерное по окружности, равноускоренное по окружности), исходя из условий: А) a =0, an=const Б) a =const, a n=0 В) a =0, a n=0 2. Укажите направление векторов ω и ε при замедленном движении м. т. по окружности: 3. Укажите направление вектора скорости по заданным направлениям векторов r и ω.
Тренировочные вопросы по теме «кинематика» 1. Выберите вид движения материальной точки (равномерное прямолинейное, равноускоренное прямолинейное, равномерное по окружности, равноускоренное по окружности), исходя из условий: А) a =0, an=const Б) a =const, a n=0 В) a =0, a n=0 2. Укажите направление векторов ω и ε при замедленном движении м. т. по окружности: 3. Укажите направление вектора скорости по заданным направлениям векторов r и ω.