

fd2f101b29b7715d39b0946abd018b6e.ppt
- Количество слайдов: 40
 • Rectification on YZ plane
• Rectification on YZ plane
 Rectification on XZ plane
Rectification on XZ plane
 • Rectification on XY plane
• Rectification on XY plane
 Detail of the rectified image on XY plane
Detail of the rectified image on XY plane
 VANISHING POINTS GEOMETRY The original image (Volubilis, Morok)") ONE (OR TWO) VANISHING POINTS GEOMETRY The original image (Volubilis, Morok)
ONE (OR TWO) VANISHING POINTS GEOMETRY The original image (Volubilis, Morok)
 RECTIFICATION Observation of two families of parallel lines
RECTIFICATION Observation of two families of parallel lines
 RECTIFIED IMAGE The deformation on the upper line are due to lack of planarity of the mosaic
RECTIFIED IMAGE The deformation on the upper line are due to lack of planarity of the mosaic
 CORRECT SCALING
CORRECT SCALING
 • The Vanishing Point Geometry is a powerful tool. Geometry + • With one Vanishing Point only: the image can be rectified: the Vanishing Point ratio base/height is not correct • With two Vanishing Points (one horizontal, one vertical): the Vanishing Points image can be rectified: the ratio base/height is not correct • With three Vanishing Points: the image can be rectified, the ratio Vanishing Points base/height is correct, the orientation can be assessed, both for the original and the rectified image, apart from one unknown scale factor - • Camera axis must be very inclined • Only WA are suitable
• The Vanishing Point Geometry is a powerful tool. Geometry + • With one Vanishing Point only: the image can be rectified: the Vanishing Point ratio base/height is not correct • With two Vanishing Points (one horizontal, one vertical): the Vanishing Points image can be rectified: the ratio base/height is not correct • With three Vanishing Points: the image can be rectified, the ratio Vanishing Points base/height is correct, the orientation can be assessed, both for the original and the rectified image, apart from one unknown scale factor - • Camera axis must be very inclined • Only WA are suitable
 Photo. Modeler by Eos Systems - Canada • A project: from the pictures") 8) Photo. Modeler by Eos Systems - Canada • A project: from the pictures to the recostruction of the 3 -D model • The inverse camera : Determination camera parameters Low-cost software 1000 $
8) Photo. Modeler by Eos Systems - Canada • A project: from the pictures to the recostruction of the 3 -D model • The inverse camera : Determination camera parameters Low-cost software 1000 $
 Project: Options Selection measure unity
Project: Options Selection measure unity
 Type of camera List
Type of camera List
 resolution of the images camera parameters
resolution of the images camera parameters
 Image Selection in the project
Image Selection in the project
 Options of the computation Punti omologhi collimati in numero minimo
Options of the computation Punti omologhi collimati in numero minimo
 final model with texture Modello Wireframe
final model with texture Modello Wireframe
 The inverse camera : Unknown camera parameters
The inverse camera : Unknown camera parameters
 constraints to set Format. cam Processo vincolato
constraints to set Format. cam Processo vincolato
 Tests Sintetic image given = -20° = 40° Zc= 3. 25
Tests Sintetic image given = -20° = 40° Zc= 3. 25
 si è dedotto che nelle collimazioni si ha un’incertezza di") Dalla deviazione standard (SQM) si è dedotto che nelle collimazioni si ha un’incertezza di 0, 6 pixel per unità di misura. Photo. Modeer
Dalla deviazione standard (SQM) si è dedotto che nelle collimazioni si ha un’incertezza di 0, 6 pixel per unità di misura. Photo. Modeer
 si è dedotto che nelle collimazioni si ha un’incertezza di") Dalla deviazione standard (SQM) si è dedotto che nelle collimazioni si ha un’incertezza di 0, 5 pixel per unità di misura. P F 3
Dalla deviazione standard (SQM) si è dedotto che nelle collimazioni si ha un’incertezza di 0, 5 pixel per unità di misura. P F 3
 Cubo 100_30_f 28 Results: Φ 29. 935 deg Expected: 30 deg θ 9. 953 deg 10 deg Κ -0. 010 deg f 27. 957 mm 28 mm ppx 400. 546 pxl 400 pxl ppy 299. 985 pxl P 300 pxl F 3 Cubo 60_15_f 35 Results: Φ 15. 453 deg Expected: 15 deg θ -30. 038 deg -30 deg Κ -0. 245 deg 0 deg f 35. 001 mm 35 mm ppx 394. 151 pxl 400 pxl ppy 297. 443 pxl 300 pxl
Cubo 100_30_f 28 Results: Φ 29. 935 deg Expected: 30 deg θ 9. 953 deg 10 deg Κ -0. 010 deg f 27. 957 mm 28 mm ppx 400. 546 pxl 400 pxl ppy 299. 985 pxl P 300 pxl F 3 Cubo 60_15_f 35 Results: Φ 15. 453 deg Expected: 15 deg θ -30. 038 deg -30 deg Κ -0. 245 deg 0 deg f 35. 001 mm 35 mm ppx 394. 151 pxl 400 pxl ppy 297. 443 pxl 300 pxl
 Ancona – Traiano’s arch – Model formation by Photomodeler
Ancona – Traiano’s arch – Model formation by Photomodeler
 Ancona – Traiano’s arch – The residuals of the Model formation
Ancona – Traiano’s arch – The residuals of the Model formation
 Ancona – Traiano’s arch – the camera stations
Ancona – Traiano’s arch – the camera stations
 A practical example of 3 D- reconstruction The Ho Chi Minh’s house in Hanoi
A practical example of 3 D- reconstruction The Ho Chi Minh’s house in Hanoi
 Back sie Right side Left side Front
Back sie Right side Left side Front
 inverse Camera Interior camera Parameters stored formato. cam
inverse Camera Interior camera Parameters stored formato. cam
 Some phases of the observation and referencing process Points in 3 D space Height of the parapet = 1 Module
Some phases of the observation and referencing process Points in 3 D space Height of the parapet = 1 Module
 PF 3 measurements Interior Exterior Photo. Modeler P F 3
PF 3 measurements Interior Exterior Photo. Modeler P F 3
 Model Recostruction in Auto. Cad
Model Recostruction in Auto. Cad
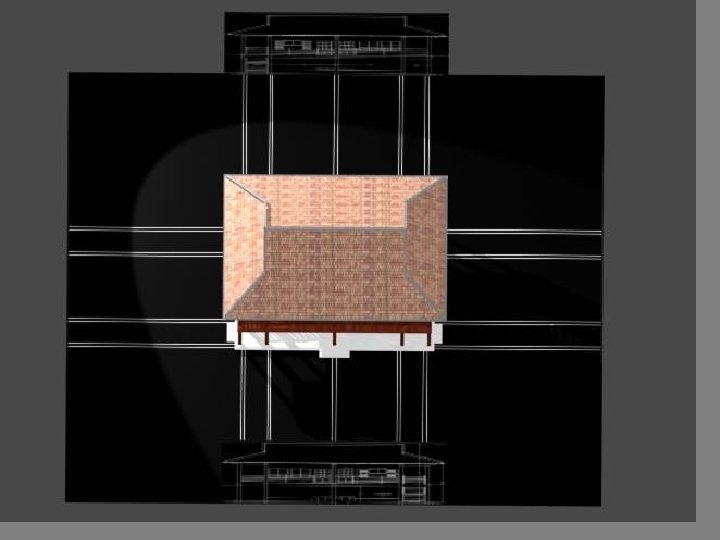

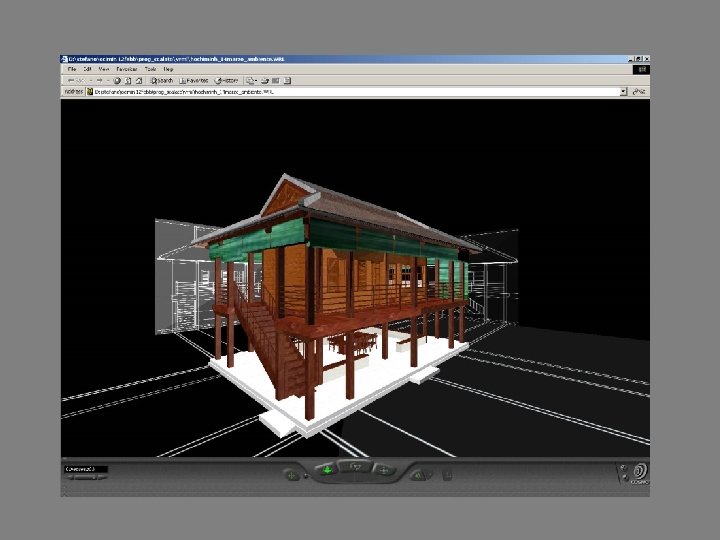
 Photo. Modeler: üutilized by non-specialised operators üvery powerful üVery good interface üMany options Ø 3 D modeling Ø VRML export ØRectification ØNon-metric images ØControl informations ØNo need to supply approximate value üOnly one control information is missing: the camera station coordinates
Photo. Modeler: üutilized by non-specialised operators üvery powerful üVery good interface üMany options Ø 3 D modeling Ø VRML export ØRectification ØNon-metric images ØControl informations ØNo need to supply approximate value üOnly one control information is missing: the camera station coordinates
 • ARPENTEUR by Pierre Drap – Pierre Grussenmeyer • (ARchitectural Photogramm. Etry Network") 9) • ARPENTEUR by Pierre Drap – Pierre Grussenmeyer • (ARchitectural Photogramm. Etry Network Tool for Ed. Ucation and Research). • Designed in 1998 by two research teams (GAMSAU-CNRS and ENSAIS-LERGEC) • Mainly for Education
9) • ARPENTEUR by Pierre Drap – Pierre Grussenmeyer • (ARchitectural Photogramm. Etry Network Tool for Ed. Ucation and Research). • Designed in 1998 by two research teams (GAMSAU-CNRS and ENSAIS-LERGEC) • Mainly for Education
 • The running from the net • Thus it can be easily and freely used – from anywhere, by anybody all over the world and – with whatever operating system. • www. arpenteur. net. • Dedicated to architectural photogrammetry and close range terrestrial photogrammetry, but aerial images (limited to a few Mb) can be also handled.
• The running from the net • Thus it can be easily and freely used – from anywhere, by anybody all over the world and – with whatever operating system. • www. arpenteur. net. • Dedicated to architectural photogrammetry and close range terrestrial photogrammetry, but aerial images (limited to a few Mb) can be also handled.
 • Photos from a wide range of calibrated cameras – metric – non-metric camera, – digital amateur camera • ARPENTEUR permits a better knowledge of basic photogrammetric techniques • • stereoplotting, image correlation, architectural photogrammetry architectural modelling • Output results can then be viewed as text-file, DGN, DXF, VRML file for a further processing with Internet or CAD systems (e. g. : Micro. Station, Auto. Cad).
• Photos from a wide range of calibrated cameras – metric – non-metric camera, – digital amateur camera • ARPENTEUR permits a better knowledge of basic photogrammetric techniques • • stereoplotting, image correlation, architectural photogrammetry architectural modelling • Output results can then be viewed as text-file, DGN, DXF, VRML file for a further processing with Internet or CAD systems (e. g. : Micro. Station, Auto. Cad).
 Conclusions: • There are today on the market many good products for any purpose and for any pocket • The quality of a system is based not only in the accuracy but anso in the efficiency • Photointerpretation • Orthophoto
Conclusions: • There are today on the market many good products for any purpose and for any pocket • The quality of a system is based not only in the accuracy but anso in the efficiency • Photointerpretation • Orthophoto
 Acknowledgements Thanks to my students who helped me, part of this material is their graduation thesis: • Matteo Cinti, Marco Battistelli • Paolo Clini • Gianluca Gagliardini • Stefano Benassi • Paolo Margione • Loretta Alessandroni • Ivan Catini • Floriano Capponi • Ingrid Luciani
Acknowledgements Thanks to my students who helped me, part of this material is their graduation thesis: • Matteo Cinti, Marco Battistelli • Paolo Clini • Gianluca Gagliardini • Stefano Benassi • Paolo Margione • Loretta Alessandroni • Ivan Catini • Floriano Capponi • Ingrid Luciani