

Л_02_тема_2_Назначение САУ и САР.ppt
- Количество слайдов: 35
 Развитие автоматики на транспортной технике 1. Логические автоматические устройства 2. Автоматический контроль параметров движения на транспортной технике 3. Автоматические устройства транспортной техники, обеспечивающие функционирование технических систем
Развитие автоматики на транспортной технике 1. Логические автоматические устройства 2. Автоматический контроль параметров движения на транспортной технике 3. Автоматические устройства транспортной техники, обеспечивающие функционирование технических систем
 Автомат – это система механизмов и устройств (электрических, электронных, механических, пневматических, гидравлических и т. п. ), в которой процессы получения, преобразования, передачи и использования энергии, материала и информации выполняются без непосредственного участия человека. Различают технологические, транспортные, вычислительные, управляющие и другие автоматы. Важнейшей особенностью любого автомата является полная механизация процессов переработки информации. Основой логических схем автоматов являются способы введения и использования информации. Рабочий цикл преобразования информации, в автомате А определяется программой которая может задаваться в аналоговой форме, цифровым способом и в комбинации аналоговой и цифровой форм.
Автомат – это система механизмов и устройств (электрических, электронных, механических, пневматических, гидравлических и т. п. ), в которой процессы получения, преобразования, передачи и использования энергии, материала и информации выполняются без непосредственного участия человека. Различают технологические, транспортные, вычислительные, управляющие и другие автоматы. Важнейшей особенностью любого автомата является полная механизация процессов переработки информации. Основой логических схем автоматов являются способы введения и использования информации. Рабочий цикл преобразования информации, в автомате А определяется программой которая может задаваться в аналоговой форме, цифровым способом и в комбинации аналоговой и цифровой форм.
 Разомкнутые Замкнутые Цифровые Аналоговые А АЦ Адаптивные
Разомкнутые Замкнутые Цифровые Аналоговые А АЦ Адаптивные
 Логические автоматы AI, A 2 и АЗ предельно просты - поток информации от программы поступает к устройствам управления, и от них к исполнительным механизмам. Пример – торговые автоматы. Информация из блока программы передается в специальный узел, где она преобразуется в вид, удобный для управления источником энергии и исполнительными механизмами. Такие автоматы имеют один поток информации, который реализуется разомкнутой схемой управления А 4. Копировальный принцип
Логические автоматы AI, A 2 и АЗ предельно просты - поток информации от программы поступает к устройствам управления, и от них к исполнительным механизмам. Пример – торговые автоматы. Информация из блока программы передается в специальный узел, где она преобразуется в вид, удобный для управления источником энергии и исполнительными механизмами. Такие автоматы имеют один поток информации, который реализуется разомкнутой схемой управления А 4. Копировальный принцип
 Автоматы более высокого класса имеют два автономных потока информации, которые передаются по прямой и обратной цепям управления. В таких автоматах первым источником потока информации служит исходная программа, вводимая извне, а вторым источником - устройство, измеряющее параметры отдельных звеньев исполнительного механизма или обрабатываемого изделия. Прямая цепь управления Обратная цепь управления
Автоматы более высокого класса имеют два автономных потока информации, которые передаются по прямой и обратной цепям управления. В таких автоматах первым источником потока информации служит исходная программа, вводимая извне, а вторым источником - устройство, измеряющее параметры отдельных звеньев исполнительного механизма или обрабатываемого изделия. Прямая цепь управления Обратная цепь управления
 1 – балансируемое изделие; 2 – передаточное устройство привода; 3 – управляющее устройство; 4 – электродвигатель; 5 – сверлильный агрегат; 6 – блок управления; 7 – датчик дебаланса.
1 – балансируемое изделие; 2 – передаточное устройство привода; 3 – управляющее устройство; 4 – электродвигатель; 5 – сверлильный агрегат; 6 – блок управления; 7 – датчик дебаланса.
 Автоматы, обладающие свойством запоминать и обобщать опыт своей работы, вырабатывая оптимальную программу, называются адаптивными автоматами А 6 УУ Двигат. У Рабочие органы Программа Блок памяти Блок адаптации Устройство сбора информации, измерения параметров двигательного устройства или изделия
Автоматы, обладающие свойством запоминать и обобщать опыт своей работы, вырабатывая оптимальную программу, называются адаптивными автоматами А 6 УУ Двигат. У Рабочие органы Программа Блок памяти Блок адаптации Устройство сбора информации, измерения параметров двигательного устройства или изделия
 Адаптивные автоматы А 6 можно характеризовать тремя потоками информации, поступающими из блоков программы 1, измерений 4 и оперативной памяти 7. При этом автомат А 6 имеет значительно расширенные функциональные возможности и новые свойства, обеспечивающие стабильное выполнение оптимальной программы. В основе построения и функционирования автоматов лежат принципы алгебры логики, которая является одной из основных частей математической логики и широко используется в теории релейных схем, электронновычислительных и управляющих машин, логических устройств управления и дискретных автоматов.
Адаптивные автоматы А 6 можно характеризовать тремя потоками информации, поступающими из блоков программы 1, измерений 4 и оперативной памяти 7. При этом автомат А 6 имеет значительно расширенные функциональные возможности и новые свойства, обеспечивающие стабильное выполнение оптимальной программы. В основе построения и функционирования автоматов лежат принципы алгебры логики, которая является одной из основных частей математической логики и широко используется в теории релейных схем, электронновычислительных и управляющих машин, логических устройств управления и дискретных автоматов.
 Классические виды логических элементов. Наиболее распространенный тип интегральных микросхемы – аналоговые. Их ассортимент необычайно широк и разнообразен, но основное поле деятельности в звуковой технике (усилители и т. д. ), поскольку они оперируют сигналами, уровень которых может меняться плавно, непрерывно, приобретая в процессе этих изменений бессчётное множество разных значений. Дискретные (цифровые) применяются в компьютерных областях, там где нужны быстрые и чёткие сигналы.
Классические виды логических элементов. Наиболее распространенный тип интегральных микросхемы – аналоговые. Их ассортимент необычайно широк и разнообразен, но основное поле деятельности в звуковой технике (усилители и т. д. ), поскольку они оперируют сигналами, уровень которых может меняться плавно, непрерывно, приобретая в процессе этих изменений бессчётное множество разных значений. Дискретные (цифровые) применяются в компьютерных областях, там где нужны быстрые и чёткие сигналы.
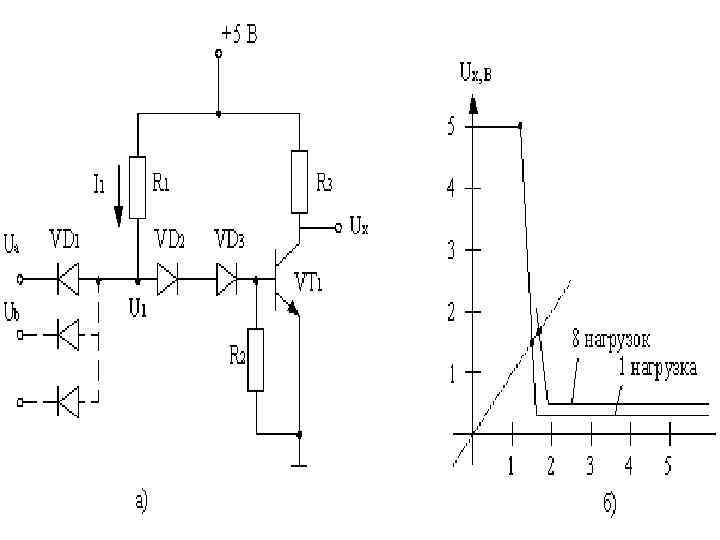
 Одним из первых семейств цифровой логики мы рассмотрим диодно -транзисторную логику. Если напряжение на входе А равно 0, то диод VD 1 смещен в прямом направлении и напряжение U 1 равно +0, 6 В. Эта величина недостаточна для открывания диодов VD 2 и VD 3 и перехода база-эмиттер транзистора VТ 1. Поэтому ток i 1 течет через диод VD 1, источник напряжения Ua и на землю. Транзистор VТ 1 закрыт, при этом Ux = +5 В. Если Ua увеличивается, то U 1 также растет до тех пор, пор пока не достигнет 1, 2 В. При этом U 1 = 1, 8 В. В этот момент VD 2, VD 3, VТ 1 открываются и ток i 1 течет через транзистор VТ 1 и переводит его в насыщение. Дальнейшее увеличение напряжение Ua запирает диод VD 1. но не может повлиять на величину U 1 или состояние транзистора VТ 1. Это относительно резкое изменение величины напряжение Ux от +0, 5 В до величены на насыщенном транзисторе Uкэ нас приведено, в соответствии с рисунком 1 б. Из графика видно, что интервалы напряжений, соответствующие логическим состояниям 0 и 1, примерно равны
Одним из первых семейств цифровой логики мы рассмотрим диодно -транзисторную логику. Если напряжение на входе А равно 0, то диод VD 1 смещен в прямом направлении и напряжение U 1 равно +0, 6 В. Эта величина недостаточна для открывания диодов VD 2 и VD 3 и перехода база-эмиттер транзистора VТ 1. Поэтому ток i 1 течет через диод VD 1, источник напряжения Ua и на землю. Транзистор VТ 1 закрыт, при этом Ux = +5 В. Если Ua увеличивается, то U 1 также растет до тех пор, пор пока не достигнет 1, 2 В. При этом U 1 = 1, 8 В. В этот момент VD 2, VD 3, VТ 1 открываются и ток i 1 течет через транзистор VТ 1 и переводит его в насыщение. Дальнейшее увеличение напряжение Ua запирает диод VD 1. но не может повлиять на величину U 1 или состояние транзистора VТ 1. Это относительно резкое изменение величины напряжение Ux от +0, 5 В до величены на насыщенном транзисторе Uкэ нас приведено, в соответствии с рисунком 1 б. Из графика видно, что интервалы напряжений, соответствующие логическим состояниям 0 и 1, примерно равны
 Автоматический контроль параметров движения: перемещения, положений, скорости и частоты вращения, ускорений 1. Принципы регистрации параметров движения 2. Приборы и оборудование для регистрации параметров движения Основы ТАУ лекция 3
Автоматический контроль параметров движения: перемещения, положений, скорости и частоты вращения, ускорений 1. Принципы регистрации параметров движения 2. Приборы и оборудование для регистрации параметров движения Основы ТАУ лекция 3
 2 Способы регистрации изменения положения в пространстве Изменение положения материального объекта в пространстве происходит под действием механических усилий при взаимодействии деталей по следующим траекториям: 1. линейные возвратно-поступательные перемещения 2. вращательные полнооборотные и угловые перемещения (малой и большой величины) 3. вибрации 4. деформация формы детали 5. внутренние твердотельные упругие колебания 6. зазоры между деталями
2 Способы регистрации изменения положения в пространстве Изменение положения материального объекта в пространстве происходит под действием механических усилий при взаимодействии деталей по следующим траекториям: 1. линейные возвратно-поступательные перемещения 2. вращательные полнооборотные и угловые перемещения (малой и большой величины) 3. вибрации 4. деформация формы детали 5. внутренние твердотельные упругие колебания 6. зазоры между деталями
 Датчик перемещений поплавка
Датчик перемещений поплавка
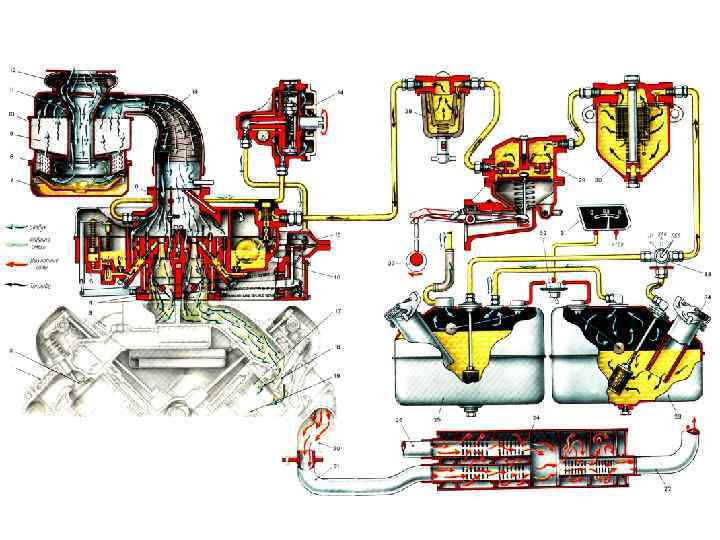

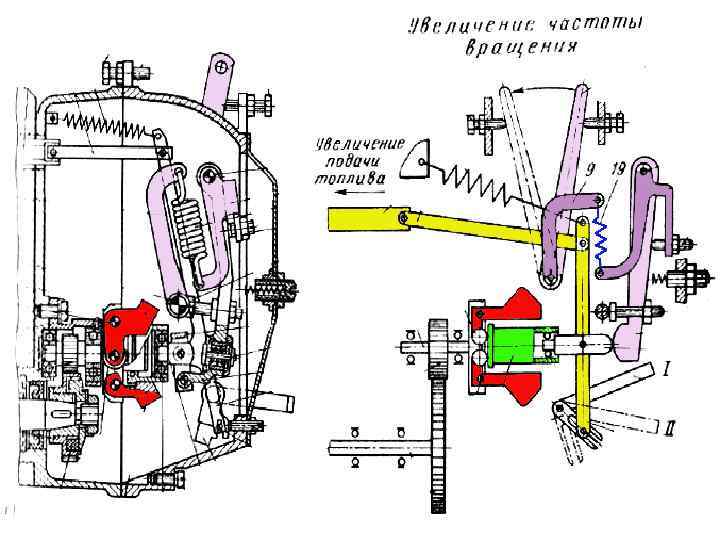
 Автоматизация ТПН
Автоматизация ТПН
 Стуки и шумы ДВС
Стуки и шумы ДВС
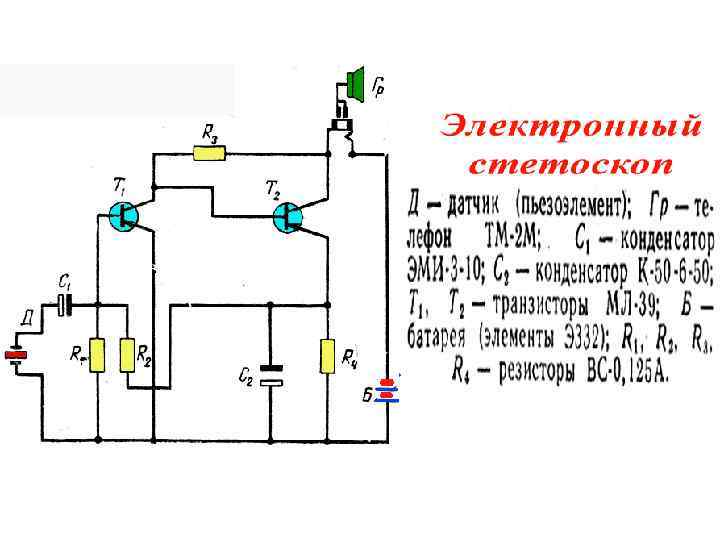
 Пьезоэлектрический датчик
Пьезоэлектрический датчик
 1 - Элемент Холла 2, 3 - Полюса магнита 4 - Аттенюатор 5 - Окно
1 - Элемент Холла 2, 3 - Полюса магнита 4 - Аттенюатор 5 - Окно
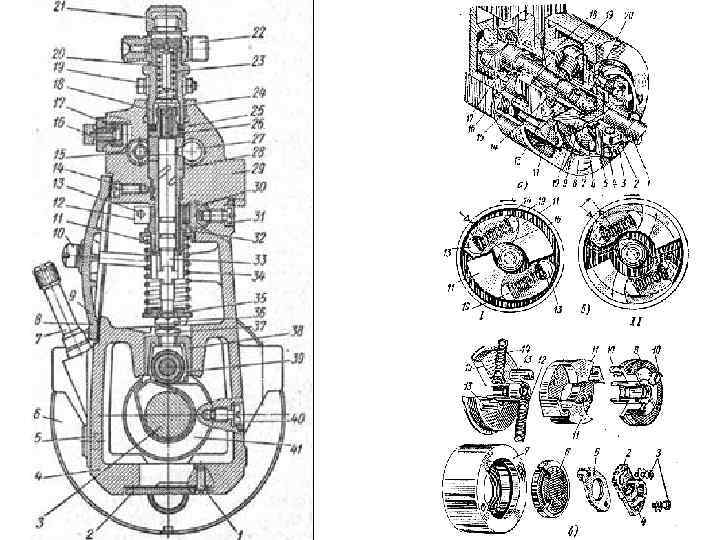
 Шаговые распределители имеют щетки, которые перемещаются шагами, производя поочередное переключение цепей. При включении электромагнита 5 якорь 4 притягивается и собачка 6 взводится на один зуб храповика, укрепленного на одной оси со щетками. При выключении электромагнита якорь под действием пружины и рычага 3 возвращается в прежнее положение и собачка поворачивает храповик с щетками на один шаг. Положение храповика и щеток фиксируется стопорной собачкой 2.
Шаговые распределители имеют щетки, которые перемещаются шагами, производя поочередное переключение цепей. При включении электромагнита 5 якорь 4 притягивается и собачка 6 взводится на один зуб храповика, укрепленного на одной оси со щетками. При выключении электромагнита якорь под действием пружины и рычага 3 возвращается в прежнее положение и собачка поворачивает храповик с щетками на один шаг. Положение храповика и щеток фиксируется стопорной собачкой 2.
 Перемещением луча управляет внешнее вращающееся магнитное поле
Перемещением луча управляет внешнее вращающееся магнитное поле

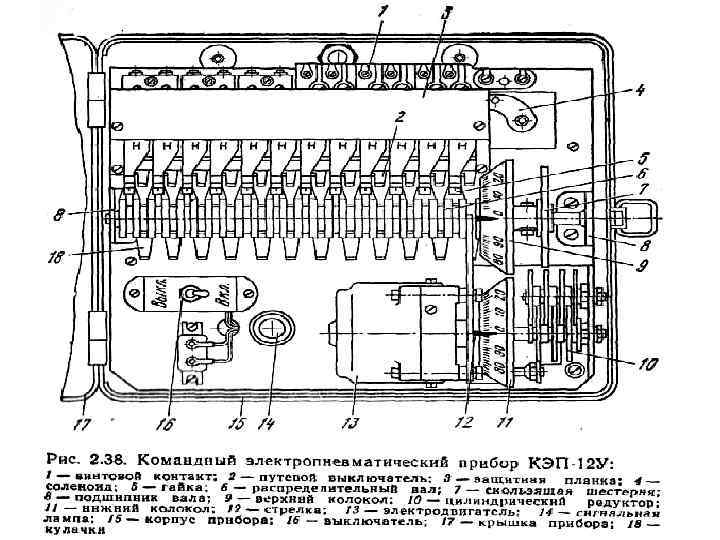
 Для программирования последовательности включения и выключения цепей автоматических электрических схем часто применяются реле моторного типа. Этими реле (командоаппаратом), можно управлять различными механизмами, имеющими большое количество электрических цепей
Для программирования последовательности включения и выключения цепей автоматических электрических схем часто применяются реле моторного типа. Этими реле (командоаппаратом), можно управлять различными механизмами, имеющими большое количество электрических цепей
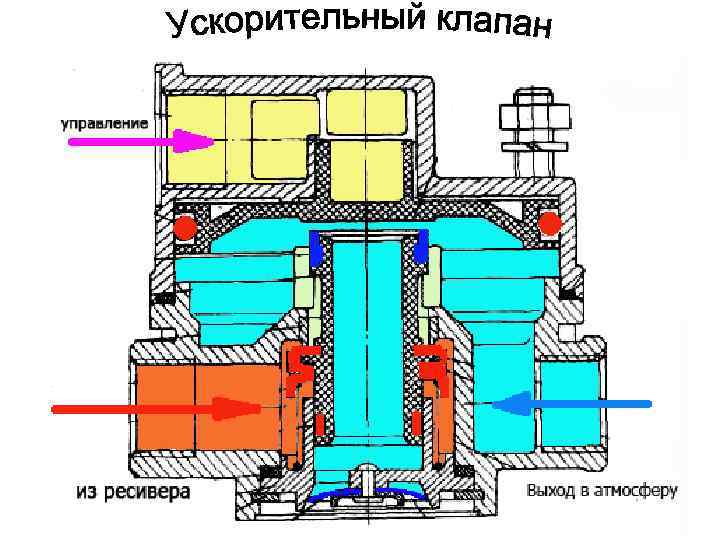
 В системах автоматического контроля и регулирования в процессе измерения физическая величина сравнивается с образцовой мерой. Приборы и схемы, выполняющие эту функцию, представляют группу элементов сравнения. К ним относятся автоматические компенсаторы, уравновешенные мосты и устройства с дифференциально-трансформаторными схемами
В системах автоматического контроля и регулирования в процессе измерения физическая величина сравнивается с образцовой мерой. Приборы и схемы, выполняющие эту функцию, представляют группу элементов сравнения. К ним относятся автоматические компенсаторы, уравновешенные мосты и устройства с дифференциально-трансформаторными схемами

 Форсунка и плунжерная пара
Форсунка и плунжерная пара
 Спасибо за внимание !!!
Спасибо за внимание !!!