

RTS_RNS.ppt
- Количество слайдов: 38
 Радионавигационные системы РНС –это совокупность устройств, предназначенных для управления движением объектов из одной точки пространства в другую по оптимальной в заданных условиях траектории. Для этого нужно знать текущее положение, направление и скорость движения объекта навигации. Известны следующие методы определения местоположения объектов навигации (ОН): Метод счисления пути, позиционный метод и обзорно-сравнительный метод. Метод счисления пути основан на интегрировании по времени измеренного вектора скорости ОН относительно поверхности Земли. В качестве датчика применяют доплеровский измеритель скорости (ДИС) – доплеровская навигационная система. Радионавигационные параметры: дальность, радиальная скорость, угловая координата. РП измеряются относительно радионавигационных точек (РНТ), координаты которых известны с высокой точностью. Если РНТ движутся, то координаты – функции времени. Определение координат производится в системе координат (цилиндрической, сферической или иной). Используются географическая и геоцентрическая системы координат. В географической СК Г Ш – угол между плоскостью экватора и отвесной линией. ГД – двугранный угол между плоскостями Гринвичского меридиана и местного меридиана, проходящего через проекцию ОН на земную поверхность. В геоцентрической СК ГД определяется также, Г Ш, как угол между плоскостью экватора и линией ОН – центр Земли. Т. е. Земля считается шаром. Геометрическое место точек равных значений навигационных параметров – есть поверхность положения. Линия положения. Местоположение (МП) объекта навигации определяется по центру его массы. Радионавигационные элементы (РНЭ) – геометрические или механические величины, характеризующие МП или перемещение объекта навигации.
Радионавигационные системы РНС –это совокупность устройств, предназначенных для управления движением объектов из одной точки пространства в другую по оптимальной в заданных условиях траектории. Для этого нужно знать текущее положение, направление и скорость движения объекта навигации. Известны следующие методы определения местоположения объектов навигации (ОН): Метод счисления пути, позиционный метод и обзорно-сравнительный метод. Метод счисления пути основан на интегрировании по времени измеренного вектора скорости ОН относительно поверхности Земли. В качестве датчика применяют доплеровский измеритель скорости (ДИС) – доплеровская навигационная система. Радионавигационные параметры: дальность, радиальная скорость, угловая координата. РП измеряются относительно радионавигационных точек (РНТ), координаты которых известны с высокой точностью. Если РНТ движутся, то координаты – функции времени. Определение координат производится в системе координат (цилиндрической, сферической или иной). Используются географическая и геоцентрическая системы координат. В географической СК Г Ш – угол между плоскостью экватора и отвесной линией. ГД – двугранный угол между плоскостями Гринвичского меридиана и местного меридиана, проходящего через проекцию ОН на земную поверхность. В геоцентрической СК ГД определяется также, Г Ш, как угол между плоскостью экватора и линией ОН – центр Земли. Т. е. Земля считается шаром. Геометрическое место точек равных значений навигационных параметров – есть поверхность положения. Линия положения. Местоположение (МП) объекта навигации определяется по центру его массы. Радионавигационные элементы (РНЭ) – геометрические или механические величины, характеризующие МП или перемещение объекта навигации.
 Пересечение двух поверхностей положения определяет линию положения – геометрическое место точек пространства, имеющих неизменяющиеся значения двух навигационных параметров. Таким образом местоположение объекта определяется координатами точки пересечения трех поверхностей положения или двух линий положения. Из-за нелинейности две линии положения могут пересекаться в двух различных точках. Неоднозначность местоположения можно устранить использованием дополнительных поверхностей положения.
Пересечение двух поверхностей положения определяет линию положения – геометрическое место точек пространства, имеющих неизменяющиеся значения двух навигационных параметров. Таким образом местоположение объекта определяется координатами точки пересечения трех поверхностей положения или двух линий положения. Из-за нелинейности две линии положения могут пересекаться в двух различных точках. Неоднозначность местоположения можно устранить использованием дополнительных поверхностей положения.
 Классификация РНС по способу определения местоположения: угломерные; дальномерные; разностнодальномерные; комбинационные. по виду несущего информацию и измеряемого параметра радиосигнала. Decca Navigator Mk 12 Decca (Декка) — гиперболическая радионавигационная система, работавшая в СДВ диапазоне, впервые была развёрнута во время Второй мировой войны, когда войска союзников нуждались в системе позволяющей достигнуть точных посадок. (Как и Loran C её основным назначением стала навигация в прибрежных водах). После войны система была развёрнута в Северном море и использовалась до 2000 г. вертолётами, работающими на нефтяных платформах.
Классификация РНС по способу определения местоположения: угломерные; дальномерные; разностнодальномерные; комбинационные. по виду несущего информацию и измеряемого параметра радиосигнала. Decca Navigator Mk 12 Decca (Декка) — гиперболическая радионавигационная система, работавшая в СДВ диапазоне, впервые была развёрнута во время Второй мировой войны, когда войска союзников нуждались в системе позволяющей достигнуть точных посадок. (Как и Loran C её основным назначением стала навигация в прибрежных водах). После войны система была развёрнута в Северном море и использовалась до 2000 г. вертолётами, работающими на нефтяных платформах.
 — общее название типа радионавигационной системы для ориентации на море и в") Консоль (Consol) — общее название типа радионавигационной системы для ориентации на море и в воздухе. Эта РНС состоит из нескольких радиостанций (радиомаяков f=250 -350 к. Гц, ширина луча станции 10 -15°) с вращающейся диаграммой направленности излучения. Передатчик, равномерно вращающимся лучом с помощью азбуки Морзе передаёт свои позывные (или просто точки). Период вращения Ё1 минута (например). В момент прохождения лучом направления север-юг передатчик излучает ненаправленный (круговой) сигнал. Наблюдатель, желающий определить своё местоположение, используя радиоприёмник и секундомер может по времени между приёмом направленного и ненаправленного сигналов определить свой азимут со стороны радиостанции. Точно так же, определив азимут от другой радиостанции системы, наблюдатель уже может, зная координаты этих станций, нарисовать на карте схему, по которой можно определить своё местоположение. Если наблюдатель способен принять сигналы 3 и более станций системы, то это увеличивало точность определения и устраняло возможные ошибки. Достоинством системы является простота навигационного оборудования: секундомер, приёмник, карта и табличка с данными о станциях. Недостаток: длительность определения координат, малая точность (1— 2° координат на расстояниях порядка 1600 км).
Консоль (Consol) — общее название типа радионавигационной системы для ориентации на море и в воздухе. Эта РНС состоит из нескольких радиостанций (радиомаяков f=250 -350 к. Гц, ширина луча станции 10 -15°) с вращающейся диаграммой направленности излучения. Передатчик, равномерно вращающимся лучом с помощью азбуки Морзе передаёт свои позывные (или просто точки). Период вращения Ё1 минута (например). В момент прохождения лучом направления север-юг передатчик излучает ненаправленный (круговой) сигнал. Наблюдатель, желающий определить своё местоположение, используя радиоприёмник и секундомер может по времени между приёмом направленного и ненаправленного сигналов определить свой азимут со стороны радиостанции. Точно так же, определив азимут от другой радиостанции системы, наблюдатель уже может, зная координаты этих станций, нарисовать на карте схему, по которой можно определить своё местоположение. Если наблюдатель способен принять сигналы 3 и более станций системы, то это увеличивало точность определения и устраняло возможные ошибки. Достоинством системы является простота навигационного оборудования: секундомер, приёмник, карта и табличка с данными о станциях. Недостаток: длительность определения координат, малая точность (1— 2° координат на расстояниях порядка 1600 км).
 Импульсно-фазовая разностно-дальномерная система Loran-C работает на частоте 100 к. Гц. На этих частотах поглощение радиоволн в ионосфере может быть значительным, особенно при больших углах падения. Система Loran-C относится к классу гиперболических систем, хотя и основана на измерении не фазы, а задержки импульсов, принимаемых от цепочки передающих станций. В каждой цепочке одна из станций является ведущей, а остальные — ведомые. Все они точно синхронизируются. Приемник измеряет точность прихода импульсов с точностью 0, 1 мкс, и, если используется земная волна, местоположение может определяться с точностью 150 м на расстояниях до 1500 км (на море). В общем случае сигнал представляет собой сумму земной волны и сигналов, отраженных один или несколько раз от ионосферы. На расстояниях свыше 2000 км ионосферная волна преобладает и точность будет зависеть от состояния ионосферы. Испытания показали, что в отдельных случаях могут возникнуть ошибки в несколько километров. Таким образом, даже при идеальных условиях система Loran-C не будет иметь точность, которую обеспечивают спутниковые системы GPS и ГЛОНАСС. Импульсно-фазовая радионавигационная система «Чайка» — российский аналог американской системы Loran-C. Система была разработана в 1958 г. по заказу ВВС СССР.
Импульсно-фазовая разностно-дальномерная система Loran-C работает на частоте 100 к. Гц. На этих частотах поглощение радиоволн в ионосфере может быть значительным, особенно при больших углах падения. Система Loran-C относится к классу гиперболических систем, хотя и основана на измерении не фазы, а задержки импульсов, принимаемых от цепочки передающих станций. В каждой цепочке одна из станций является ведущей, а остальные — ведомые. Все они точно синхронизируются. Приемник измеряет точность прихода импульсов с точностью 0, 1 мкс, и, если используется земная волна, местоположение может определяться с точностью 150 м на расстояниях до 1500 км (на море). В общем случае сигнал представляет собой сумму земной волны и сигналов, отраженных один или несколько раз от ионосферы. На расстояниях свыше 2000 км ионосферная волна преобладает и точность будет зависеть от состояния ионосферы. Испытания показали, что в отдельных случаях могут возникнуть ошибки в несколько километров. Таким образом, даже при идеальных условиях система Loran-C не будет иметь точность, которую обеспечивают спутниковые системы GPS и ГЛОНАСС. Импульсно-фазовая радионавигационная система «Чайка» — российский аналог американской системы Loran-C. Система была разработана в 1958 г. по заказу ВВС СССР.
 Transit — первая спутниковая система навигации. Начала разрабатываться уже в 1958 году в США. В 1959 году на орбиту выведен первый навигационный искусственный спутник Земли, а в 1964 году вступила в эксплуатацию система для обеспечения американских атомных ракетных подводных лодок «Поларис» . Для коммерческого использования эта система была предоставлена в 1967 г. , причем число гражданских потребителей вскоре существенно превысило число военных. К концу 1975 г. на круговых околоземных (высота около 1000 км) орбитах находилось 6 НКА. [1] Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6 -7 навигационных космических аппаратов. При этом последний находился в поле видимости в течение примерно 40 мин. , что позволяло получить достаточно высокую точность определения координат для медленно движущихся и стационарных объектов (единицы метров при геодезических работах). Масса НКА — 56 кг. Рабочие частоты 400 и 150 МГц. К настоящему времени система используется лишь для проведения исследований ионосферы.
Transit — первая спутниковая система навигации. Начала разрабатываться уже в 1958 году в США. В 1959 году на орбиту выведен первый навигационный искусственный спутник Земли, а в 1964 году вступила в эксплуатацию система для обеспечения американских атомных ракетных подводных лодок «Поларис» . Для коммерческого использования эта система была предоставлена в 1967 г. , причем число гражданских потребителей вскоре существенно превысило число военных. К концу 1975 г. на круговых околоземных (высота около 1000 км) орбитах находилось 6 НКА. [1] Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6 -7 навигационных космических аппаратов. При этом последний находился в поле видимости в течение примерно 40 мин. , что позволяло получить достаточно высокую точность определения координат для медленно движущихся и стационарных объектов (единицы метров при геодезических работах). Масса НКА — 56 кг. Рабочие частоты 400 и 150 МГц. К настоящему времени система используется лишь для проведения исследований ионосферы.
 (Перенаправлено с Циклон (КА)) У этого термина существуют и другие значения,") Циклон (навигационная система) (Перенаправлено с Циклон (КА)) У этого термина существуют и другие значения, см. Циклон (значения). Цикло н — первая спутниковая навигационная система в СССР. В её состав входили три аппаратных комплекса: «Цунами-АМ» на искусственных спутниках Земли, «Цунами-БМ» (P-790) на кораблях и «Цунами-ВМ» на береговых объектах. Первые спутники системы, Космос-192 и Космос-220, были запущены соответственно 27 ноября 1967 года и 7 мая 1968 года. Развёртывание системы начато в 1971 году, а на вооружение принята в 1976 году в составе шести космических аппаратов «Парус» , обращающихся на околополярных орбитах высотой 1000 км. Для нормального функционирования системы требуется поддержание на орбите группировки из 6 спутников «Парус» . Аппаратура, используемая на этой серии спутников, позволяет определять координаты на плоскости с точностью до 80— 100 метров. [1] Выяснилось, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ).
Циклон (навигационная система) (Перенаправлено с Циклон (КА)) У этого термина существуют и другие значения, см. Циклон (значения). Цикло н — первая спутниковая навигационная система в СССР. В её состав входили три аппаратных комплекса: «Цунами-АМ» на искусственных спутниках Земли, «Цунами-БМ» (P-790) на кораблях и «Цунами-ВМ» на береговых объектах. Первые спутники системы, Космос-192 и Космос-220, были запущены соответственно 27 ноября 1967 года и 7 мая 1968 года. Развёртывание системы начато в 1971 году, а на вооружение принята в 1976 году в составе шести космических аппаратов «Парус» , обращающихся на околополярных орбитах высотой 1000 км. Для нормального функционирования системы требуется поддержание на орбите группировки из 6 спутников «Парус» . Аппаратура, используемая на этой серии спутников, позволяет определять координаты на плоскости с точностью до 80— 100 метров. [1] Выяснилось, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ).
 Точность определения координат системой «Циклон» значительно уступает характеристикам более современных систем навигации NAVSTAR и ГЛОНАСС. Несмотря на это, система по-прежнему поддерживается в работоспособном состоянии. В 1976 был разработан гражданский вариант навигационной системы для нужд торгового морского флота, получивший название «Цикада» . Цикада — гражданский вариант морской спутниковой навигационной системы «Циклон» . Приёмная аппаратура «Шхуна» обеспечивает определение положения судна с точностью 50 -100 метров. Сдана в эксплуатацию в 1979 г. в составе 4 спутников «Цикада» , выведенных на круговые орбиты высотой 1000 км. , наклонением 83°. Плоскости орбит наклонены на 45° друг к другу.
Точность определения координат системой «Циклон» значительно уступает характеристикам более современных систем навигации NAVSTAR и ГЛОНАСС. Несмотря на это, система по-прежнему поддерживается в работоспособном состоянии. В 1976 был разработан гражданский вариант навигационной системы для нужд торгового морского флота, получивший название «Цикада» . Цикада — гражданский вариант морской спутниковой навигационной системы «Циклон» . Приёмная аппаратура «Шхуна» обеспечивает определение положения судна с точностью 50 -100 метров. Сдана в эксплуатацию в 1979 г. в составе 4 спутников «Цикада» , выведенных на круговые орбиты высотой 1000 км. , наклонением 83°. Плоскости орбит наклонены на 45° друг к другу.
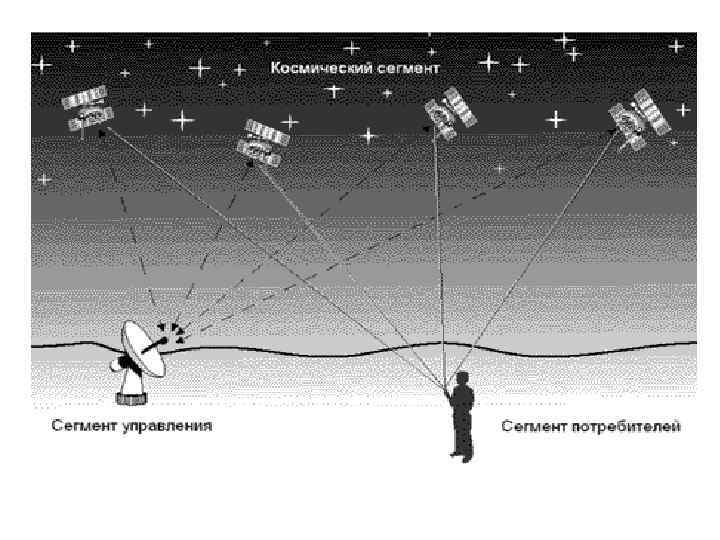
 Системы глобального позиционирования Спутниковые радионавигационные системы Назначение спутниковых систем. Спутниковые радионавигационные системы — комплексные радиоэлектронные системы (СРНС), состоящие из совокупности наземного и космического оборудования, предназначенные для определения местоположения (географических координат и высоты), точного времени и параметров движения (скорости и направления движения и т. д. ) наземных, водных и воздушных объектов. СРНС выполняют свои функции в любой точке планеты, что характеризует их как глобальные системы. Важным качеством СРНС является их автономность и беззапросный режим функционирования. Использование псевдослучайных сигналов придает им высокую помехозащищённость и надёжность при небольшой мощности излучения передатчиков. Навигационные системы NAVSTAR GPS и ГЛОНАСС состоят из трёх подсистем: - подсистемы космических аппаратов; - подсистемы контроля и управления; - навигационной аппаратуры потребителей.
Системы глобального позиционирования Спутниковые радионавигационные системы Назначение спутниковых систем. Спутниковые радионавигационные системы — комплексные радиоэлектронные системы (СРНС), состоящие из совокупности наземного и космического оборудования, предназначенные для определения местоположения (географических координат и высоты), точного времени и параметров движения (скорости и направления движения и т. д. ) наземных, водных и воздушных объектов. СРНС выполняют свои функции в любой точке планеты, что характеризует их как глобальные системы. Важным качеством СРНС является их автономность и беззапросный режим функционирования. Использование псевдослучайных сигналов придает им высокую помехозащищённость и надёжность при небольшой мощности излучения передатчиков. Навигационные системы NAVSTAR GPS и ГЛОНАСС состоят из трёх подсистем: - подсистемы космических аппаратов; - подсистемы контроля и управления; - навигационной аппаратуры потребителей.
 Системное время GPS есть Всемирное координированное время UTC, отнесённое к началу 1980 года: TGPS = UTC(1980. 0). Поправки TGPS к Всемирному координированному времени UTC регистрируются с высокой точностью и передаются в виде постоянной величины в навигационном сообщении, а также публикуются в специальных бюллетенях. Системное время ГЛОНАСС периодически подстраивается под всемирное координированное время, и T ГЛОНАСС = UTC. В бортовую шкалу времени спутников вводится пересчётный коэффициент, зависящий от высоты орбиты и учитывающий релятивистские эффекты (движение спутника относительно наземных часов; разность гравитационных потенциалов на орбите и на поверхности Земли). Так, для системы ГЛОНАСС он равен 1‑ 4, 36× 10 ‑ 10 (релятивистская поправка на 37, 7 мкс в сутки). Исторически возникшая в астрономии шкала всемирного времени задается вращением Земли. Начиная с 1884 года, среднее солнечное время на меридиане Гринвича называется всемирным временем UT (Universal Time). Наиболее приближенной к равномерной шкале времени, которую можно получить из наблюдений суточного движения звезд, является система всемирного времени UT 2. Однако и ей одной невозможно пользоваться на протяжении долгого (несколько десятков лет) промежутка времени. Это связано с тем, что период вращения Земли вокруг собственной оси – величина не постоянная. Под воздействием лунных и солнечных приливов она постоянно увеличивается на несколько миллисекунд за 100 лет. В 1967 году было дано определение атомной секунды. Звучит оно так: «продолжительность 9 192 631 770 колебаний излучения, соответствующего резонансной частоте перехода между двумя уровнями сверхтонкой структуры основного состояния атома цезия-133, при отсутствии возмущений от внешних полей» . Появление молекулярных и атомных стандартов частоты привело к созданию абсолютно новой шкалы времени - шкалы международного атомного времени TAI (Time Atomic International).
Системное время GPS есть Всемирное координированное время UTC, отнесённое к началу 1980 года: TGPS = UTC(1980. 0). Поправки TGPS к Всемирному координированному времени UTC регистрируются с высокой точностью и передаются в виде постоянной величины в навигационном сообщении, а также публикуются в специальных бюллетенях. Системное время ГЛОНАСС периодически подстраивается под всемирное координированное время, и T ГЛОНАСС = UTC. В бортовую шкалу времени спутников вводится пересчётный коэффициент, зависящий от высоты орбиты и учитывающий релятивистские эффекты (движение спутника относительно наземных часов; разность гравитационных потенциалов на орбите и на поверхности Земли). Так, для системы ГЛОНАСС он равен 1‑ 4, 36× 10 ‑ 10 (релятивистская поправка на 37, 7 мкс в сутки). Исторически возникшая в астрономии шкала всемирного времени задается вращением Земли. Начиная с 1884 года, среднее солнечное время на меридиане Гринвича называется всемирным временем UT (Universal Time). Наиболее приближенной к равномерной шкале времени, которую можно получить из наблюдений суточного движения звезд, является система всемирного времени UT 2. Однако и ей одной невозможно пользоваться на протяжении долгого (несколько десятков лет) промежутка времени. Это связано с тем, что период вращения Земли вокруг собственной оси – величина не постоянная. Под воздействием лунных и солнечных приливов она постоянно увеличивается на несколько миллисекунд за 100 лет. В 1967 году было дано определение атомной секунды. Звучит оно так: «продолжительность 9 192 631 770 колебаний излучения, соответствующего резонансной частоте перехода между двумя уровнями сверхтонкой структуры основного состояния атома цезия-133, при отсутствии возмущений от внешних полей» . Появление молекулярных и атомных стандартов частоты привело к созданию абсолютно новой шкалы времени - шкалы международного атомного времени TAI (Time Atomic International).
 Основные понятия и определения Астрономические и неастрономические величины отсчета времени. Сутки = 86400 сек (соответствуют полному обороту Земли вокруг оси вращения) и зависят от положения наблюдателя, времени года. Звездные сутки – интервал между верхними кульминациями точки весеннего равноденствия. UTC - Universal Time (SU) - шкала времени Государственного эталона частоты и времени России не является непрерывной шкалой вследствие её периодической секундной коррекции. UTC - Universal Time Coordinated - всемирное координированное время. Международная система высокоточного определения среднего времени по гринвичскому меридиану, учитывающая сезонные изменения скорости вращения Земли. UTM (Universal Transverse Mercator) - универсальная поперечная проекция Меркатора (картографическая). В России и странах СНГ применяется ее частный случай – проекция Гаусса-Крюгера.
Основные понятия и определения Астрономические и неастрономические величины отсчета времени. Сутки = 86400 сек (соответствуют полному обороту Земли вокруг оси вращения) и зависят от положения наблюдателя, времени года. Звездные сутки – интервал между верхними кульминациями точки весеннего равноденствия. UTC - Universal Time (SU) - шкала времени Государственного эталона частоты и времени России не является непрерывной шкалой вследствие её периодической секундной коррекции. UTC - Universal Time Coordinated - всемирное координированное время. Международная система высокоточного определения среднего времени по гринвичскому меридиану, учитывающая сезонные изменения скорости вращения Земли. UTM (Universal Transverse Mercator) - универсальная поперечная проекция Меркатора (картографическая). В России и странах СНГ применяется ее частный случай – проекция Гаусса-Крюгера.
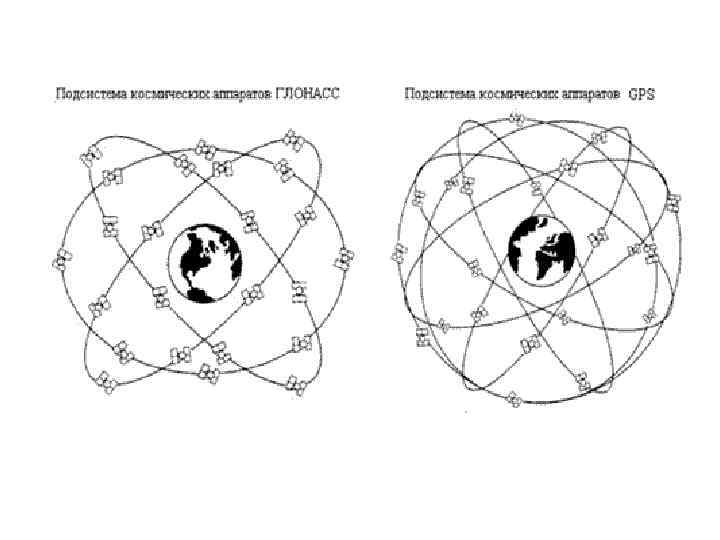
, разбитые по группам, вращаются с периодом около 12") Подсистема космических аппаратов. Навигационные спутники (НС), разбитые по группам, вращаются с периодом около 12 часов в трех орбитальных плоскостях на неизменной средневысотной орбите на постоянном расстоянии от поверхности Земли. Этому условию удовлетворяет орбитальная группировка из 24 спутников на близких к круговым орбитам высотой около 20 тыс. км и наклонением орбит 55°-65°, которые образуют сеть над поверхностью земли. Система спутников имеет избыточность, что позволяет оптимизировать выбор в аппаратуре потребителей оптимальной группы спутников по значениям геометрического фактора и отношению сигнал -шум. На каждом спутнике располагаются эталоны времени и частоты ‑ «высокоточные атомные часы» , бортовой навигационный передатчик, имеющий выходную мощность до 50 Вт, работающий в L ‑ диапазоне частот, антенную систему с шириной ДНА около 40 °, бортовой управляющий комплекс, систему ориентации и стабилизации и различные вспомогательные устройства.
Подсистема космических аппаратов. Навигационные спутники (НС), разбитые по группам, вращаются с периодом около 12 часов в трех орбитальных плоскостях на неизменной средневысотной орбите на постоянном расстоянии от поверхности Земли. Этому условию удовлетворяет орбитальная группировка из 24 спутников на близких к круговым орбитам высотой около 20 тыс. км и наклонением орбит 55°-65°, которые образуют сеть над поверхностью земли. Система спутников имеет избыточность, что позволяет оптимизировать выбор в аппаратуре потребителей оптимальной группы спутников по значениям геометрического фактора и отношению сигнал -шум. На каждом спутнике располагаются эталоны времени и частоты ‑ «высокоточные атомные часы» , бортовой навигационный передатчик, имеющий выходную мощность до 50 Вт, работающий в L ‑ диапазоне частот, антенную систему с шириной ДНА около 40 °, бортовой управляющий комплекс, систему ориентации и стабилизации и различные вспомогательные устройства.
 Для синхронизации шкал времени различных спутников с необходимой точностью используются цезиевые стандарты частоты с относительной нестабильностью порядка 10‑ 13. Высокая стабильность необходима для синхронизации шкал времени многопозиционной системы. Так ошибка синхронизации временных шкал равная 10 нс вносит погрешность в навигационные измерения до 15 м. Конструктивно спутники представляют собой герметичный контейнер, на внешней стороне которого расположены солнечные батареи и антенные системы. Кроме основной аппаратуры в контейнере расположены аккумуляторы, обеспечивающие работу на теневой стороне земли. В настоящее время осуществляются запуски спутников Глонасс второго (индекс М) и третьего поколения (индекс К), имеющих больший ресурс, чем спутники первого поколения. Спутник Глонасс-М Спутник Глонасс-К
Для синхронизации шкал времени различных спутников с необходимой точностью используются цезиевые стандарты частоты с относительной нестабильностью порядка 10‑ 13. Высокая стабильность необходима для синхронизации шкал времени многопозиционной системы. Так ошибка синхронизации временных шкал равная 10 нс вносит погрешность в навигационные измерения до 15 м. Конструктивно спутники представляют собой герметичный контейнер, на внешней стороне которого расположены солнечные батареи и антенные системы. Кроме основной аппаратуры в контейнере расположены аккумуляторы, обеспечивающие работу на теневой стороне земли. В настоящее время осуществляются запуски спутников Глонасс второго (индекс М) и третьего поколения (индекс К), имеющих больший ресурс, чем спутники первого поколения. Спутник Глонасс-М Спутник Глонасс-К
 Основные навигационные характеристики НС К основным характеристикам НС относят зону обзора, зону видимости, продолжительность наблюдения, орбитальную конфигурацию сети НС и др. Зона обзора НС представляет собой участок земной поверхности, на котором можно осуществлять прием его сигналов. Центром зоны обзора является подспутниковая точка О 3, называемая географическим местом спутника (ГМС). Географические широта и долгота могут быть рассчитаны по формулам: где - орбитальные элементы НС; - гринвичское звездное время; - угловая скорость прецессии узла орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому ее размер зависит от высоты НС. Размер зоны обзора характеризуется углом βmax или соответствующей ему дугой, которая называется радиусом зоны обзора R 0 . АП обеспечивает заданную точность измерений в зоне обзора, ограниченной радиогоризонтом, который поднят для пользователя на угол 5°. . . 10° (угол маски). Относительная площадь обзора S 3 – площадь Земли.
Основные навигационные характеристики НС К основным характеристикам НС относят зону обзора, зону видимости, продолжительность наблюдения, орбитальную конфигурацию сети НС и др. Зона обзора НС представляет собой участок земной поверхности, на котором можно осуществлять прием его сигналов. Центром зоны обзора является подспутниковая точка О 3, называемая географическим местом спутника (ГМС). Географические широта и долгота могут быть рассчитаны по формулам: где - орбитальные элементы НС; - гринвичское звездное время; - угловая скорость прецессии узла орбиты. Зона обзора ограничена линией истинного горизонта в точке НС, поэтому ее размер зависит от высоты НС. Размер зоны обзора характеризуется углом βmax или соответствующей ему дугой, которая называется радиусом зоны обзора R 0 . АП обеспечивает заданную точность измерений в зоне обзора, ограниченной радиогоризонтом, который поднят для пользователя на угол 5°. . . 10° (угол маски). Относительная площадь обзора S 3 – площадь Земли.
 РЕШЕНИЕ НАВИГАЦИОННОЙ ЗАДАЧИ Решить навигационную задачу значит определить элементы вектора состояния потребителя, включающие пространственные координаты, временную поправку шкалы времени потребителя относительно системной шкалы времени и вектор скорости. Измеряются такие навигационные параметры, как дальность до объекта R и радиальная скорость сближения объектов, а соответствующие им задержка сигнала и доплеровское смещение частоты являются радионавигационными параметрами. Связь между ними определяется соотношениями: Навигационные функции определяются видом навигационного параметра, характером движения спутников и потребителя выбранной системой координат и т. д. Навигационные функции для пространственных координат потребителя можно определить дальномерным, псевдодальномерным, разностно-дальномерным, угломерным методами и комбинациями этих методов. Функционирующие СРНС ГЛОНАСС и GPS используют псевдодальномерный метод.
РЕШЕНИЕ НАВИГАЦИОННОЙ ЗАДАЧИ Решить навигационную задачу значит определить элементы вектора состояния потребителя, включающие пространственные координаты, временную поправку шкалы времени потребителя относительно системной шкалы времени и вектор скорости. Измеряются такие навигационные параметры, как дальность до объекта R и радиальная скорость сближения объектов, а соответствующие им задержка сигнала и доплеровское смещение частоты являются радионавигационными параметрами. Связь между ними определяется соотношениями: Навигационные функции определяются видом навигационного параметра, характером движения спутников и потребителя выбранной системой координат и т. д. Навигационные функции для пространственных координат потребителя можно определить дальномерным, псевдодальномерным, разностно-дальномерным, угломерным методами и комбинациями этих методов. Функционирующие СРНС ГЛОНАСС и GPS используют псевдодальномерный метод.
 измерениях дальности R между i-м навигационным") Дальномерный метод навигационных определений основан на пассивных (беззапросных) измерениях дальности R между i-м навигационным спутником (НС) и потребителем. В этом методе навигационным параметром является дальность R, а поверхностью положения ‑ сфера с радиусом R и центром, расположенным в центре масс i-го спутника. Уравнение сферы где - известные на момент измерения координаты i-го НС : x, y, z координаты потребителя. Координаты х, у, z пользователя определяются как точки пересечения трех поверхностей положения по данным измерения сигналов от трех навигационных спутников из системы трех уравнений. Нелинейность системы уравнений и неоднозначность определения координат устраняются с помощью дополнительной информации (ориентировочные координаты потребителя, его радиальная скорость и др. ). В дальномерном методе неявно подразумевается, что все измерения соответствуют одному моменту времени. Координаты спутника привязаны к бортовой шкале времени, а потребитель измеряет задержку сигнала в значительно менее точной шкале времени потребителя. Это приводит к значительной погрешности местоопределения Высокостабильные эталоны времени дороги для использования в аппаратуре потребителей.
Дальномерный метод навигационных определений основан на пассивных (беззапросных) измерениях дальности R между i-м навигационным спутником (НС) и потребителем. В этом методе навигационным параметром является дальность R, а поверхностью положения ‑ сфера с радиусом R и центром, расположенным в центре масс i-го спутника. Уравнение сферы где - известные на момент измерения координаты i-го НС : x, y, z координаты потребителя. Координаты х, у, z пользователя определяются как точки пересечения трех поверхностей положения по данным измерения сигналов от трех навигационных спутников из системы трех уравнений. Нелинейность системы уравнений и неоднозначность определения координат устраняются с помощью дополнительной информации (ориентировочные координаты потребителя, его радиальная скорость и др. ). В дальномерном методе неявно подразумевается, что все измерения соответствуют одному моменту времени. Координаты спутника привязаны к бортовой шкале времени, а потребитель измеряет задержку сигнала в значительно менее точной шкале времени потребителя. Это приводит к значительной погрешности местоопределения Высокостабильные эталоны времени дороги для использования в аппаратуре потребителей.
 Псевдодальномерный метод. Под псевдодальностью от i-го НС до потребителя понимают дальность, отличающуюся от истинной дальности на неизвестную, но постоянную за время определения навигационных параметров величину (она связана с расхождением шкал времени НС и потребителя). Поверхностью положения по-прежнему является сфера с центром в точке центра масс НС, но радиус этой сферы смещен на неизвестную величину R′. Для устранения неоднозначности необходимо дополнительное измерение псевдодальности до четвертого спутника, т. е. четвертое уравнение. ПРИМЕЧАНИЕ. Необходимость нахождения в зоне видимости четырех НС предъявляет жесткие требования к структуре сети НС, которые выполняются только в среднеорбитальных СРНС. Низкоорбитальные СРНС обеспечивают периодическую видимость в зоне потребителя лишь (1. . . 2) нс, поэтому определение местоположения в этих СРНС может осуществляться не в реальном времени, а лишь после проведения последовательных (обычно доплеровских) измерений нескольких линий положения по сигналам одного НС.
Псевдодальномерный метод. Под псевдодальностью от i-го НС до потребителя понимают дальность, отличающуюся от истинной дальности на неизвестную, но постоянную за время определения навигационных параметров величину (она связана с расхождением шкал времени НС и потребителя). Поверхностью положения по-прежнему является сфера с центром в точке центра масс НС, но радиус этой сферы смещен на неизвестную величину R′. Для устранения неоднозначности необходимо дополнительное измерение псевдодальности до четвертого спутника, т. е. четвертое уравнение. ПРИМЕЧАНИЕ. Необходимость нахождения в зоне видимости четырех НС предъявляет жесткие требования к структуре сети НС, которые выполняются только в среднеорбитальных СРНС. Низкоорбитальные СРНС обеспечивают периодическую видимость в зоне потребителя лишь (1. . . 2) нс, поэтому определение местоположения в этих СРНС может осуществляться не в реальном времени, а лишь после проведения последовательных (обычно доплеровских) измерений нескольких линий положения по сигналам одного НС.
 ДАЛЬНОСТЬ ДЕЙСТВИЯ СРНС Мощность сигнала на входе приемника, расположенного на поверхности земли определяется формулой пассивной локации где Pпер – мощность передатчика навигационного спутника (50 Вт), G 1 и G 2 – коэффициенты усиления передающей и приемной антенн соответственно, η 1 и η 2 – КПД антенно-фидерных устройств передающего и приемного трактов, λ – длина волны навигационного сигнала (L – диапазон), R – расстояние от НС до аппаратуры потребителя. Отношения сигнал-помеха, отнесенные к единице полосы частот, лежат в диапазоне (38… 49) д. Б/Гц, Pпр= -(157…-162) д. Б.
ДАЛЬНОСТЬ ДЕЙСТВИЯ СРНС Мощность сигнала на входе приемника, расположенного на поверхности земли определяется формулой пассивной локации где Pпер – мощность передатчика навигационного спутника (50 Вт), G 1 и G 2 – коэффициенты усиления передающей и приемной антенн соответственно, η 1 и η 2 – КПД антенно-фидерных устройств передающего и приемного трактов, λ – длина волны навигационного сигнала (L – диапазон), R – расстояние от НС до аппаратуры потребителя. Отношения сигнал-помеха, отнесенные к единице полосы частот, лежат в диапазоне (38… 49) д. Б/Гц, Pпр= -(157…-162) д. Б.
 Элементы дальномерного кода позволяют определить дальность до спутника с погрешностью 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0, 01 периода, что соответствует точности определения псевдодальности равной 3 м. По доплеровскому смещению частоты оценивается относительная скорость перемещения спутника. Необходимость нахождения в зоне видимости четырех НС предъявляет жесткие требования к структуре сети НС, которые выполняются только в среднеорбитальных СРНС. Низкоорбитальные СРНС обеспечивают периодическую видимость в зоне потребителя лишь (1 . . . 2) нс, поэтому определение местоположения в этих СРНС может осуществляться не в реальном времени, а лишь после проведения последовательных (обычно доплеровских) измерений нескольких линий положения по сигналам одного НС.
Элементы дальномерного кода позволяют определить дальность до спутника с погрешностью 300 м. Для более точного определения необходимо знать фазу генератора дальномерного кода. Схемы построения опорных генераторов коррелятора позволяют определять его фазу с точностью до 0, 01 периода, что соответствует точности определения псевдодальности равной 3 м. По доплеровскому смещению частоты оценивается относительная скорость перемещения спутника. Необходимость нахождения в зоне видимости четырех НС предъявляет жесткие требования к структуре сети НС, которые выполняются только в среднеорбитальных СРНС. Низкоорбитальные СРНС обеспечивают периодическую видимость в зоне потребителя лишь (1 . . . 2) нс, поэтому определение местоположения в этих СРНС может осуществляться не в реальном времени, а лишь после проведения последовательных (обычно доплеровских) измерений нескольких линий положения по сигналам одного НС.
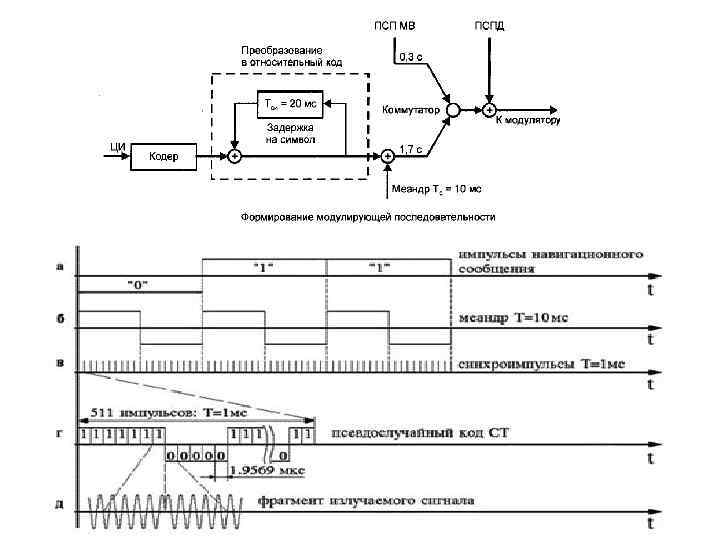
 Структура передаваемых сигналов СРНС. Структура навигационных радиосигналов системы Глонасс. В системе Глонасс каждым спутником излучаются два фазоманипулированных сигнала сдвинутые друг относительно друга по фазе на 90°. Используется частотное разделение сигналов (FDMA) различных спутников. Частота первого сигнала лежит в диапазоне L 1 (1600 МГц), а частота второго — в диапазоне L 2 (1250 МГц). Номинальные значения рабочих частот радиосигналов, передаваемых в диапазонах L 1 и L 2, определяются выражениями: fk 1 = f 1 + k Df 1 , fk 2 = f 2 + k Df 2 , где k = 0, 1, . . . , 24 — номера (каналов) литерных рабочих частот спутников; f 1 = 1602 МГц; Df 1 = 0, 5625 МГц; f 2 = 1246 МГц; Df 2 = 0, 4375 МГц. Для каждого спутника рабочие частоты сигналов в диапазоне L 1 и L 2 когерентны и формируются от одного эталона частоты. Отношение рабочих несущих частот каждого спутника: Dfk 1/Dfk 2 = 7/9. Модулирующий сигнал получают сложением по модулю 2 трех двоичных сигналов: • грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с; • последовательности навигационных данных, передаваемых со скоростью 50 бит/с; • последовательность радиоимпульсов (меандр), передаваемая со скоростью 100 бит/с.
Структура передаваемых сигналов СРНС. Структура навигационных радиосигналов системы Глонасс. В системе Глонасс каждым спутником излучаются два фазоманипулированных сигнала сдвинутые друг относительно друга по фазе на 90°. Используется частотное разделение сигналов (FDMA) различных спутников. Частота первого сигнала лежит в диапазоне L 1 (1600 МГц), а частота второго — в диапазоне L 2 (1250 МГц). Номинальные значения рабочих частот радиосигналов, передаваемых в диапазонах L 1 и L 2, определяются выражениями: fk 1 = f 1 + k Df 1 , fk 2 = f 2 + k Df 2 , где k = 0, 1, . . . , 24 — номера (каналов) литерных рабочих частот спутников; f 1 = 1602 МГц; Df 1 = 0, 5625 МГц; f 2 = 1246 МГц; Df 2 = 0, 4375 МГц. Для каждого спутника рабочие частоты сигналов в диапазоне L 1 и L 2 когерентны и формируются от одного эталона частоты. Отношение рабочих несущих частот каждого спутника: Dfk 1/Dfk 2 = 7/9. Модулирующий сигнал получают сложением по модулю 2 трех двоичных сигналов: • грубого дальномерного кода, передаваемого со скоростью 511 Кбит/с; • последовательности навигационных данных, передаваемых со скоростью 50 бит/с; • последовательность радиоимпульсов (меандр), передаваемая со скоростью 100 бит/с.
 Состав и структура навигационных сообщений спутников системы Глонасс. Навигационные сообщения НС Глонасс используются потребителям для навигационных определений и планирования сеансов связи. Они включают оперативную и не оперативную информацию. Оперативная информация относится к спутнику и включает: метки времени; сдвиг шкалы времени НС относительно шкалы системы; относительное отличие несущей частоты спутника от номинального значения; эфемероидную информацию. Время привязки эфемеридной информации и частотно-временные поправки, имеющие получасовую кратность от начала суток, позволяют точно определять географические координаты и скорость движения НС. Неоперативная информация содержит альманах, включающий: данные о состоянии всех НС системы; сдвиг шкалы времени спутника относительно шкалы системы; параметры орбит всех НС системы; поправку к шкале времени системы Глонасс. Выбор оптимального “созвездия” спутников и прогноз доплеровского сдвига несущей частоты обеспечивается альманахом системы. Навигационные сообщения спутников имеют суперкадры длительностью 2, 5 мин. Суперкадр состоит из пяти кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с. Последние 0, 3 с занимает метка времени. Остальная часть строки содержит 85 символов цифровой информации, передаваемых с частотой 50 Гц. В составе каждого кадра передается полный объем оперативной информации и часть альманаха системы. Полный альманах содержится во всем суперкадре. При этом информация суперкадра, содержащаяся в строках 1— 4, относится к тому спутнику, с которого она поступает (оперативная часть), и не меняется в пределах суперкадра.
Состав и структура навигационных сообщений спутников системы Глонасс. Навигационные сообщения НС Глонасс используются потребителям для навигационных определений и планирования сеансов связи. Они включают оперативную и не оперативную информацию. Оперативная информация относится к спутнику и включает: метки времени; сдвиг шкалы времени НС относительно шкалы системы; относительное отличие несущей частоты спутника от номинального значения; эфемероидную информацию. Время привязки эфемеридной информации и частотно-временные поправки, имеющие получасовую кратность от начала суток, позволяют точно определять географические координаты и скорость движения НС. Неоперативная информация содержит альманах, включающий: данные о состоянии всех НС системы; сдвиг шкалы времени спутника относительно шкалы системы; параметры орбит всех НС системы; поправку к шкале времени системы Глонасс. Выбор оптимального “созвездия” спутников и прогноз доплеровского сдвига несущей частоты обеспечивается альманахом системы. Навигационные сообщения спутников имеют суперкадры длительностью 2, 5 мин. Суперкадр состоит из пяти кадров длительностью 30 с. Каждый кадр содержит 15 строк длительностью 2 с. Последние 0, 3 с занимает метка времени. Остальная часть строки содержит 85 символов цифровой информации, передаваемых с частотой 50 Гц. В составе каждого кадра передается полный объем оперативной информации и часть альманаха системы. Полный альманах содержится во всем суперкадре. При этом информация суперкадра, содержащаяся в строках 1— 4, относится к тому спутнику, с которого она поступает (оперативная часть), и не меняется в пределах суперкадра.
 Структура навигационных радиосигналов системы GPS. В системе GPS все спутники излучают сигналы с одинаковой частотой и используется кодовое разделение сигналов (СDMA). Каждый спутник системы GPS излучает два фазоманипулированных сигнала. Частота первого сигнала составляет L 1 = 1575, 42 МГц, а второго — L 2 = 1227, 6 МГц. Сигнал несущей частоты L 1 модулируется двумя двоичными последовательностями, каждая из которых образована путем суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных, формируемых со скоростью 50 бит/с. На частоте L 1 передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р или закрытого кода Y и навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/A (открытого) кода и той же последовательности навигационных данных. Радиосигнал на частоте L 2 бифазно манипулирован только одной из двух последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли. Каждый спутник использует свои дальномерные коды С/A и Р(Y), что позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
Структура навигационных радиосигналов системы GPS. В системе GPS все спутники излучают сигналы с одинаковой частотой и используется кодовое разделение сигналов (СDMA). Каждый спутник системы GPS излучает два фазоманипулированных сигнала. Частота первого сигнала составляет L 1 = 1575, 42 МГц, а второго — L 2 = 1227, 6 МГц. Сигнал несущей частоты L 1 модулируется двумя двоичными последовательностями, каждая из которых образована путем суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных, формируемых со скоростью 50 бит/с. На частоте L 1 передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р или закрытого кода Y и навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/A (открытого) кода и той же последовательности навигационных данных. Радиосигнал на частоте L 2 бифазно манипулирован только одной из двух последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли. Каждый спутник использует свои дальномерные коды С/A и Р(Y), что позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
 Состав и структура навигационных сообщений спутников системы GPS. Структурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12, 5 мин). Один кадр передается в течение 30 с и имеет размер 1500 бит. Кадр разделен на 5 подкадров по 300 бит и передается в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6 -с интервала системного времени GPS. Подкадр состоит из 10 30 -бит слов. В каждом слове 6 младших разрядов являются проверочными битами. В 1 -, 2 - и 3 -м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид НС, с которым установлена связь. Содержание и структура подкадров неизменны на всех страницах суперкадра. В 4 - и 5 -м подкадрах содержится информация о конфигурации и состоянии всех НС системы, альманахи спутников, специальные сообщения, параметры, описывающие связь времени GPS с UTC. Сигналы СРНС Galileo. Для СРНС Galileo Международный союз электросвязи МСЭ (ITU – International Telecomunication Union) выделил шесть пользовательских дипазонов частот в диапазоне L и один служебный в диапазоне С. Частоты всех трех СРНС – Galileo, GPS, ГЛОНАСС – близко расположены. Кодовое разделение сигналов CDMA (Сode Division Multiple Access) систем Galileo и GPS позволяет им использовать перекрывающиеся участки частотного спектра и создает возможность приема сигналов одним многоканальным радионавигационным приемником. Частотная многоканальность СРНС Galileo, наряду с планируемыми широкополосными сигналами, гарантирует надежную помехоустойчивую работу системы, а также компенсацию ионосферных погрешностей навигации.
Состав и структура навигационных сообщений спутников системы GPS. Структурное деление навигационной информации спутников системы GPS осуществляется на суперкадры, подкадры и слова. Суперкадр образуется из 25 кадров и занимает 750 с (12, 5 мин). Один кадр передается в течение 30 с и имеет размер 1500 бит. Кадр разделен на 5 подкадров по 300 бит и передается в течение интервала 6 с. Начало каждого подкадра обозначает метку времени, соответствующую началу/окончанию очередного 6 -с интервала системного времени GPS. Подкадр состоит из 10 30 -бит слов. В каждом слове 6 младших разрядов являются проверочными битами. В 1 -, 2 - и 3 -м подкадрах передаются данные о параметрах коррекции часов и данные эфемерид НС, с которым установлена связь. Содержание и структура подкадров неизменны на всех страницах суперкадра. В 4 - и 5 -м подкадрах содержится информация о конфигурации и состоянии всех НС системы, альманахи спутников, специальные сообщения, параметры, описывающие связь времени GPS с UTC. Сигналы СРНС Galileo. Для СРНС Galileo Международный союз электросвязи МСЭ (ITU – International Telecomunication Union) выделил шесть пользовательских дипазонов частот в диапазоне L и один служебный в диапазоне С. Частоты всех трех СРНС – Galileo, GPS, ГЛОНАСС – близко расположены. Кодовое разделение сигналов CDMA (Сode Division Multiple Access) систем Galileo и GPS позволяет им использовать перекрывающиеся участки частотного спектра и создает возможность приема сигналов одним многоканальным радионавигационным приемником. Частотная многоканальность СРНС Galileo, наряду с планируемыми широкополосными сигналами, гарантирует надежную помехоустойчивую работу системы, а также компенсацию ионосферных погрешностей навигации.
 Подсистема контроля и управления. Наземный комплекс управления СРНС. Функции НКУ: - командное и программное радиоуправление спутниковой группировкой; - расчет орбитальных траекторий (эфемерид); - частотно-временное обеспечение; - мониторинг радионавигационного поля; - радиотелеметрический мониторинг спутниковой группировки. На НКУ используется аппаратура на основе водородного стандарта с относительной нестабильностью 10 -14. В состав подсистемы контроля и управления входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешностью (3… 5) нс. НКУ включает координационно-вычислительный центр (КВЦ), станции траекторных измерений и управления (СТИ), систему (наземного) эталона времени и частоты (СЭВЧ). Данные вычислений передаются на НС и они транслируют их потребителям в служебном сообщении в виде кадров соответствующего формата. Проблемой работы НКУ является высокоточное определение и прогнозирование параметров орбит навигационных спутников. Достижение необходимой точности эфемерид навигационных спутнике потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок газоотделением материалов покрытий. В настоящее время точность вычисления эфемерид НС при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по бинормали к орбите — 10 м; по высоте 5 м (СКО).
Подсистема контроля и управления. Наземный комплекс управления СРНС. Функции НКУ: - командное и программное радиоуправление спутниковой группировкой; - расчет орбитальных траекторий (эфемерид); - частотно-временное обеспечение; - мониторинг радионавигационного поля; - радиотелеметрический мониторинг спутниковой группировки. На НКУ используется аппаратура на основе водородного стандарта с относительной нестабильностью 10 -14. В состав подсистемы контроля и управления входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешностью (3… 5) нс. НКУ включает координационно-вычислительный центр (КВЦ), станции траекторных измерений и управления (СТИ), систему (наземного) эталона времени и частоты (СЭВЧ). Данные вычислений передаются на НС и они транслируют их потребителям в служебном сообщении в виде кадров соответствующего формата. Проблемой работы НКУ является высокоточное определение и прогнозирование параметров орбит навигационных спутников. Достижение необходимой точности эфемерид навигационных спутнике потребовало проведения большого объема работ по учету факторов второго порядка малости, таких как световое давление, неравномерность вращения Земли и движение ее полюсов, а также исключение действия на спутник в полете реактивных сил, вызванных негерметичностью двигательных установок газоотделением материалов покрытий. В настоящее время точность вычисления эфемерид НС при прогнозе на 30 ч составляет: вдоль орбиты — 20 м; по бинормали к орбите — 10 м; по высоте 5 м (СКО).
 Точность спутниковой навигации. Потенциально спутниковые навигационные системы позволяют потребителю получить координаты с точностью 10– 15 м. Для многих задач требуется большая точность. До снятия ограничений применялось искусственное «загрубление» точности, называемый режимом селективного доступа. После отмены этого режима основную роль играют: -ошибки расчета эфемерид спутников; - нестабильность и расхождение шкал времени часов спутников; - неконтролируемые ионосферные и тропосферные задержки; - ошибки, возникающие из-за многолучевости распространения навигационного сигнала; - аппаратурные погрешности. Минимальное значение среднеквадратической ошибки (СКО) оценки временного параметра сигнала на фоне некоррелированного гауссовского шума со спектральной плотностью N 0 описывается выражением
Точность спутниковой навигации. Потенциально спутниковые навигационные системы позволяют потребителю получить координаты с точностью 10– 15 м. Для многих задач требуется большая точность. До снятия ограничений применялось искусственное «загрубление» точности, называемый режимом селективного доступа. После отмены этого режима основную роль играют: -ошибки расчета эфемерид спутников; - нестабильность и расхождение шкал времени часов спутников; - неконтролируемые ионосферные и тропосферные задержки; - ошибки, возникающие из-за многолучевости распространения навигационного сигнала; - аппаратурные погрешности. Минимальное значение среднеквадратической ошибки (СКО) оценки временного параметра сигнала на фоне некоррелированного гауссовского шума со спектральной плотностью N 0 описывается выражением
 – спектральная") где q – отношение сигнал-шум, b – эффективная ширина спектра сигнала, G(f) – спектральная плотность сигнала. Точность измерения навигационного параметра при наличии помех зависит также и от отношения сигнал-помеха. Потенциальная точность измерения достигается при использовании оптимального приемника – согласованного фильтра или коррелятора. Для увеличения точности увеличивают базу сложных сигналов. СКО определения местоположения зависит от геометрического фактора ГКД , где ‑ СКО измерения навигационного параметра, ГКД ‑ геометрический фактор, оказывающий существенное влияние на точность навигации и зависящий от взаимного расположения аппаратуры потребителя и навигационных спутников. Среднеквадратическое значение геометрического фактора принимается равным 2, 6.
где q – отношение сигнал-шум, b – эффективная ширина спектра сигнала, G(f) – спектральная плотность сигнала. Точность измерения навигационного параметра при наличии помех зависит также и от отношения сигнал-помеха. Потенциальная точность измерения достигается при использовании оптимального приемника – согласованного фильтра или коррелятора. Для увеличения точности увеличивают базу сложных сигналов. СКО определения местоположения зависит от геометрического фактора ГКД , где ‑ СКО измерения навигационного параметра, ГКД ‑ геометрический фактор, оказывающий существенное влияние на точность навигации и зависящий от взаимного расположения аппаратуры потребителя и навигационных спутников. Среднеквадратическое значение геометрического фактора принимается равным 2, 6.
 Методы повышения точности местоопределения Есть три основных направления: 1. Расширение диапазона частот. (НС системы GPS в будущем будут передавать три новых навигационных сигнала для гражданского пользования и два более мощных помехоустойчивых сигнала для МО США), что позволит корректировать временные ошибки, возникающие из-за преломления в ионосфере. 2. Повышение устойчивости к воздействию различных мешающих факторов, в том числе радиопомех, т. к. передатчики НС имеют мощность 50 Вт, то их сигнал легко подавляется близкорасположенными радиосредствами, работающими в совпадающем диапазоне частот, в том числе непреднамеренными и преднамеренными помехами. Действие шумов и помех приводит к снижению отношения сигнал-шум.
Методы повышения точности местоопределения Есть три основных направления: 1. Расширение диапазона частот. (НС системы GPS в будущем будут передавать три новых навигационных сигнала для гражданского пользования и два более мощных помехоустойчивых сигнала для МО США), что позволит корректировать временные ошибки, возникающие из-за преломления в ионосфере. 2. Повышение устойчивости к воздействию различных мешающих факторов, в том числе радиопомех, т. к. передатчики НС имеют мощность 50 Вт, то их сигнал легко подавляется близкорасположенными радиосредствами, работающими в совпадающем диапазоне частот, в том числе непреднамеренными и преднамеренными помехами. Действие шумов и помех приводит к снижению отношения сигнал-шум.
 разнообразна по назначению, структуре и набору сервисных функций. АП осуществляет") Навигационная аппаратура потребителей (АП) разнообразна по назначению, структуре и набору сервисных функций. АП осуществляет выбор 4 -х из всех наблюдаемых спутников для расчета псевдодальностей и расчет навигационных данных. АП включает радиоприемные устройства и устройства обработки, Некоторые модели АП позволяют производить дифференциальные измерения расстояний между двумя точками с сантиметровой точностью. Для этого измеряется положение приемника в двух точках с минимально возможным промежутком времени. При этом факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д. ) взаимно компенсируются.
Навигационная аппаратура потребителей (АП) разнообразна по назначению, структуре и набору сервисных функций. АП осуществляет выбор 4 -х из всех наблюдаемых спутников для расчета псевдодальностей и расчет навигационных данных. АП включает радиоприемные устройства и устройства обработки, Некоторые модели АП позволяют производить дифференциальные измерения расстояний между двумя точками с сантиметровой точностью. Для этого измеряется положение приемника в двух точках с минимально возможным промежутком времени. При этом факторы, мешающие измерению (погрешность орбит спутников, неоднородность атмосферы в данном месте Земли и т. д. ) взаимно компенсируются.
 АП содержит три функциональных блока: радиочастотный блок, цифровой коррелятор и процессор обработки данных В радиочастотной части приемника входной сигнал усиливается, фильтруется, переносится на более низкую частоту. Выходной сигнал приемника подвергается аналого-цифровому преобразованию и поступает на вход цифрового коррелятора. В корреляторе спектр сигнала переносится на видеочастоту путем перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. После корреляционной обработки (перемножения с опорным дальномерным кодом и накопления на периоде дальномерного кода) корреляционные интегралы I и Q поступают в процессор для дальнейшей обработки.
АП содержит три функциональных блока: радиочастотный блок, цифровой коррелятор и процессор обработки данных В радиочастотной части приемника входной сигнал усиливается, фильтруется, переносится на более низкую частоту. Выходной сигнал приемника подвергается аналого-цифровому преобразованию и поступает на вход цифрового коррелятора. В корреляторе спектр сигнала переносится на видеочастоту путем перемножения входного сигнала коррелятора с опорным гармоническим колебанием в синфазном и квадратурном каналах. После корреляционной обработки (перемножения с опорным дальномерным кодом и накопления на периоде дальномерного кода) корреляционные интегралы I и Q поступают в процессор для дальнейшей обработки.
 Число каналов приема 50 параллельных каналов") Пример параметров ресиверов приемников АП (U-blox LEA-5 S) Число каналов приема 50 параллельных каналов Обновление данных 4 раза в секунду Рабочая частота 1575, 42 МГц (L 1) Точность измерения 2. 5 м CEP (50%) 2 D 5 м CEP (50%) 3 D Горячий старт: 1 с Время старта Теплый старт: 29 с Холодный старт: 29 с Повторный захват сигнала Чувствительность Менее 1 с -144 д. Бм в режиме обнаружения сигнала - 160 д. Бм в режиме слежениия Протокол NMEA, RTCM, UBX Последовательный интерфейс 1 UART, 1 USB V 2. 0 Full Speed 12 Mbit/s, 1 DDC (I 2 C compliant), 1 SPI Тип антенны Активная или пассивная Выходное сопротивление 50 Ом Напряжение питания 2, 7 В ÷ 3, 6 В
Пример параметров ресиверов приемников АП (U-blox LEA-5 S) Число каналов приема 50 параллельных каналов Обновление данных 4 раза в секунду Рабочая частота 1575, 42 МГц (L 1) Точность измерения 2. 5 м CEP (50%) 2 D 5 м CEP (50%) 3 D Горячий старт: 1 с Время старта Теплый старт: 29 с Холодный старт: 29 с Повторный захват сигнала Чувствительность Менее 1 с -144 д. Бм в режиме обнаружения сигнала - 160 д. Бм в режиме слежениия Протокол NMEA, RTCM, UBX Последовательный интерфейс 1 UART, 1 USB V 2. 0 Full Speed 12 Mbit/s, 1 DDC (I 2 C compliant), 1 SPI Тип антенны Активная или пассивная Выходное сопротивление 50 Ом Напряжение питания 2, 7 В ÷ 3, 6 В
 Организованные помехи типа JAMMER – это одиночный источник помех. При мощности около 100 Вт его влияние на приемник GPS не так эффективно, как влияние многих маломощных до 1 Вт и распределенных по пространству источников помех. Если разместить на поверхности земли несколько 100 -н jammers на расстоянии 10 -20 км друг от друга, то их сложно запеленговать, поскольку создается сложная интерференционная картина, меняющаяся из-за расстройки и нестабильности их частот. Иногда размещают jammers на воздушных шарах. (Стоимость такого jammer составляет около $500). Для борьбы с такими помехами применяют антенную решетку, уменьшающую коэффициент усиления антенны в направлении каждого jammer. Методом борьбы с помехой является и адаптивная узкополосная режекторная фильтрация, заключающаяся в постановке на входе коррелятора самонастраивающегося узкополосного фильтра, не пропускающего несущую помехи в коррелятор. Этот метод сложен в реализации и не работает, если много jammers работают на близких, но разных частотах. Таким образом, для защиты от оружия, управляемого с помощью GPS, разрабатываются jammers, работающие на разных частотах в диапазоне 15761579 Мгц, размещаемые на земле и на воздушных шарах. Spuffing – навязывание навигационным приемникам ложных координат.
Организованные помехи типа JAMMER – это одиночный источник помех. При мощности около 100 Вт его влияние на приемник GPS не так эффективно, как влияние многих маломощных до 1 Вт и распределенных по пространству источников помех. Если разместить на поверхности земли несколько 100 -н jammers на расстоянии 10 -20 км друг от друга, то их сложно запеленговать, поскольку создается сложная интерференционная картина, меняющаяся из-за расстройки и нестабильности их частот. Иногда размещают jammers на воздушных шарах. (Стоимость такого jammer составляет около $500). Для борьбы с такими помехами применяют антенную решетку, уменьшающую коэффициент усиления антенны в направлении каждого jammer. Методом борьбы с помехой является и адаптивная узкополосная режекторная фильтрация, заключающаяся в постановке на входе коррелятора самонастраивающегося узкополосного фильтра, не пропускающего несущую помехи в коррелятор. Этот метод сложен в реализации и не работает, если много jammers работают на близких, но разных частотах. Таким образом, для защиты от оружия, управляемого с помощью GPS, разрабатываются jammers, работающие на разных частотах в диапазоне 15761579 Мгц, размещаемые на земле и на воздушных шарах. Spuffing – навязывание навигационным приемникам ложных координат.
 Методы подавления помех основаны на ее отличии их от сигнала по пространственным и частотным параметрам. Пространственная селекция возможна при различии направлений прихода полезного сигнала и помехи. Необходимо наличие специальной антенной системы или нескольких независимых каналов приема, каждый со своим приемным устройством, для реализации цифровой диаграммообразующей схемы. Адаптивные алгоритмы подавления узкополосных помех используют режекцию в частотной области. При этом неизбежны некоторые потери в отношении сигнал-шум. Такая режекция должна выполняться в каждом приемном канале. Режекция с помощью БПФ реализуется в частотной области путем разбиения входной последовательности данных на выборки по N отсчетов с последующим применением БПФ, пороговой обработки в частотной области и восстановлением временного сигнала. С помощью такого алгоритма гармоническая помеха подавляется примерно на 15 д. Б.
Методы подавления помех основаны на ее отличии их от сигнала по пространственным и частотным параметрам. Пространственная селекция возможна при различии направлений прихода полезного сигнала и помехи. Необходимо наличие специальной антенной системы или нескольких независимых каналов приема, каждый со своим приемным устройством, для реализации цифровой диаграммообразующей схемы. Адаптивные алгоритмы подавления узкополосных помех используют режекцию в частотной области. При этом неизбежны некоторые потери в отношении сигнал-шум. Такая режекция должна выполняться в каждом приемном канале. Режекция с помощью БПФ реализуется в частотной области путем разбиения входной последовательности данных на выборки по N отсчетов с последующим применением БПФ, пороговой обработки в частотной области и восстановлением временного сигнала. С помощью такого алгоритма гармоническая помеха подавляется примерно на 15 д. Б.
 + Адаптивный пространственновременной фильтр ‑ + Адаптивный пространственновременной фильтр ‑ Вычислитель навигационных характеристик сигнала
+ Адаптивный пространственновременной фильтр ‑ + Адаптивный пространственновременной фильтр ‑ Вычислитель навигационных характеристик сигнала
 к защищаемой АП от УПЧ радиочастотного преобразователя Буферизация входных данных для БПФ с перекрытием Умножение на сглаживающее окно Расчет порога L БПФ на N точек Пороговая обработка дискретного спектра ОБПФ на N точек Восстановление исходного темпа поступления отсчетов
к защищаемой АП от УПЧ радиочастотного преобразователя Буферизация входных данных для БПФ с перекрытием Умножение на сглаживающее окно Расчет порога L БПФ на N точек Пороговая обработка дискретного спектра ОБПФ на N точек Восстановление исходного темпа поступления отсчетов
 – ныне существующая «наследница» среднего времени по Гринвичу (Greenwich Mean") UTC (Universal Time Coordination) – ныне существующая «наследница» среднего времени по Гринвичу (Greenwich Mean Time, GMT). В нее ввели «дополнительную секунду» . В системе NAVSTAR (GPS) на борту каждого спутника размещено от 2 до 4 атомных часов. Синхронизация бортовых часов космического сегмента системы осуществляется из наземного центра управления (впрочем, последние серии спутников NAVSTAR способны синхронизировать время и между собой – на случай сбоев связи с центром управления). Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10 -13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10 -14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3– 5 нс.
UTC (Universal Time Coordination) – ныне существующая «наследница» среднего времени по Гринвичу (Greenwich Mean Time, GMT). В нее ввели «дополнительную секунду» . В системе NAVSTAR (GPS) на борту каждого спутника размещено от 2 до 4 атомных часов. Синхронизация бортовых часов космического сегмента системы осуществляется из наземного центра управления (впрочем, последние серии спутников NAVSTAR способны синхронизировать время и между собой – на случай сбоев связи с центром управления). Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10 -13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10 -14. Кроме того, в состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешность 3– 5 нс.