oap_12_13(динамические переменные).ppt
- Количество слайдов: 58



Работа с динамической памятью. Динамические массивы. Управление памятью.

Динамические переменные и массивы ► СТАТИЧЕСКИЙ -- объект, создаваемый при трансляции ► ДИНАМИЧЕСКИЙ -- при выполнении программы. «куча» или «свободное хранилище» .

недостатки - переменные занимают области сегмента данных программы и увеличивают размер программного файла; ► -размерность таких массивов как для внешних переменных (сегмент данных), так и для автоматических (стек) бывает ограничена; ► -заранее установленные размерности могут не соответствовать текущим соотношениям объемов входных данных ►

возможные изменения размерности данных в программе ► Динами ческие -статический вариант, когда размерность данных устанавливается при трансляции; ► -размерность данных становится известной в некоторый момент работы программы, затем установленная размерность данных не изменяется; ► -размерность данных меняется в течение всего времени работы программы.

Основные свойства динамических переменных: ► создаются и уничтожаются вызовами функц. или опер. ; ► количество и размерность может меняться; ► не имеет имени, доступ к ней возможен только через указатель; ► в "куче" выделяется свободная память необходимого размера и возвращается указатель на нее (адрес); ► функции уничтожения – передается указат.

Следствия ► 1. если указ. потерян – то существует, но не доступна ► 2. дин. перем. - м. содержать один или несколько указателей на другие дин. переменные (структуры) ► 3. отвественность за корректность – программист.

Работа с динамической памятью ► на “высоком уровне” - операторы –С++ ► на “низком” уровне – функции - С void*
 #include <alloc. h> #include <cstdlib> void *malloc(unsigned size); // выделить область")
Основные функции (C) #include <alloc. h> #include <cstdlib> void *malloc(unsigned size); // выделить область памяти размером // в size байтов и возвратить адрес void * calloc(unsigned size, unsigned m) NULL - в случае неудачи
; // освободить область памяти, // выделенную по адресу p")
void free(void *p); // освободить область памяти, // выделенную по адресу p
; // расширить выделенную область памяти // до размера")
void *realloc (void *p, unsigned size); // расширить выделенную область памяти // до размера size, при изменении адреса // переписать старое содержимое блока NULL

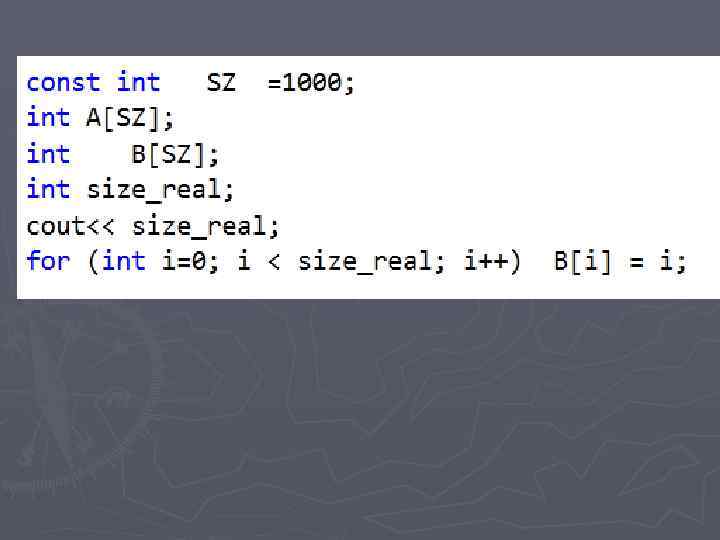
Пример создания простой динамической переменной:
 отличительные особенности ►- в операторе new указывается тип создаваемой")
Операторы new и delete (C++) отличительные особенности ►- в операторе new указывается тип создаваемой переменной, а не размерность, при этом оператор возвращает указатель того же самого типа; ► - если выделяется память под массив динамических переменных, то в операторе new добавляются квадратные скобки.
 NULL – библиотечная")
► формат указатель = new тип; (указатель ==NULL в случае ошибки) NULL – библиотечная константа (0) запрашивает у ОС выделение объема памяти delete указатель; находит в динамически распределяемой области выделенную память и помечает ее как неиспользованную
![► формат для массивов указатель = new тип [количество]; (указатель ==NULL в случае ошибки)](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-16.jpg "► формат для массивов указатель = new тип [количество]; (указатель ==NULL в случае ошибки)")
► формат для массивов указатель = new тип [количество]; (указатель ==NULL в случае ошибки) delete [] указатель;

// Обычная динамическая переменная

// Массив динамических переменных

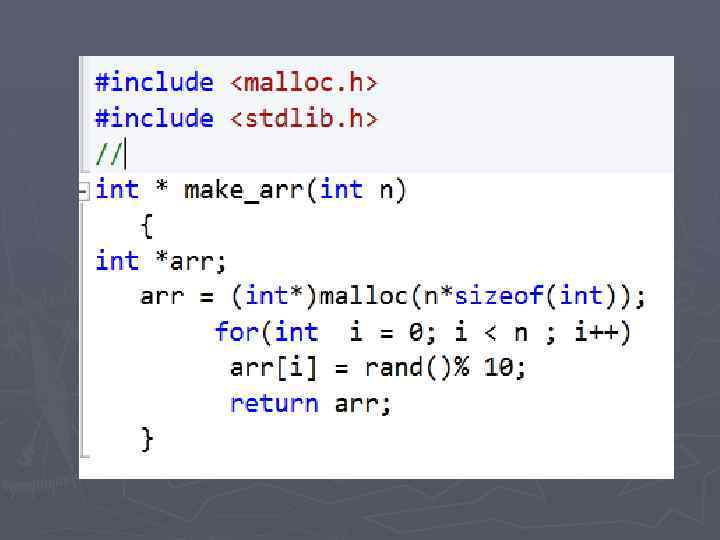
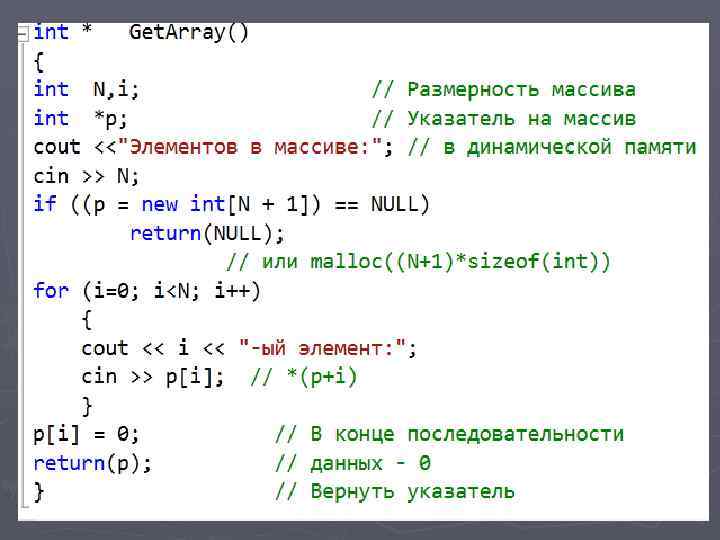
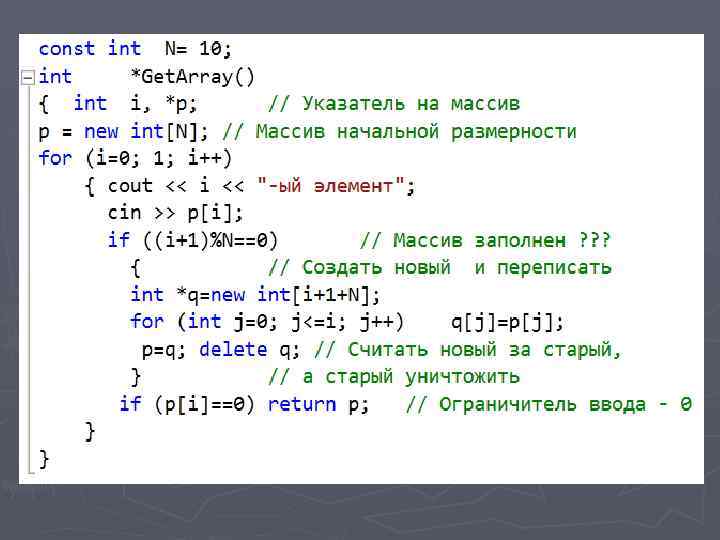
Динамические массивы ► функция возвращает указатель на создаваемый динамический массив

s v

Динамические массивы и проблемы размерности данных ►- неэффективный: под каждый вид данных зарезервировать память заранее “по максимуму” ► -в какой-то момент времени выполнения программа “узнает”, какова будет размерность обрабатываемых данных и создать динамический массив такой размерности ► -создание такой структуры данных, которая автоматически увеличивает свою размерность при ее заполнении. ВИРТУАЛЬНЫЙ МАССИВ.

Пример реализации виртуального массива Функция возвращает указатель на создаваемый динамический массив. Размерность массива увеличивается при заполнении с кратностью N – N, 2 N, 3 N. . .
 realloc(p, sizeof(int)*(i+1+N));")
p = (int*) realloc(p, sizeof(int)*(i+1+N));

Операции и библиотечные функции используются парами malloc free new delete

?

Массивы указателей
![double *p[20]; массив, каждым элементом которого является указатель на переменную типа double](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-30.jpg "double *p[20]; массив, каждым элементом которого является указатель на переменную типа double")
double *p[20]; массив, каждым элементом которого является указатель на переменную типа double
 - обычные (статическими) переменные, создаваемые транслятором, или динамические")
Формирование массивов указателей - элементы (переменные) - обычные (статическими) переменные, создаваемые транслятором, или динамические переменные, создаваемыми в процессе работы программы; ► -указатели (связи между элементами) могут быть либо инициализированы (установка начальных значений при трансляции), так и назначены в процессе выполнения программы. ►

Вариант 1 Формирование структуры данных при трансляции: переменные определяются статически, а указатели инициализируются.

Вариант 2. Переменные определяются статически, указатели устанавливаются программно.

Вариант 3. Указуемые переменные создаются динамически, массив указателей статически:

Вариант 4. Все переменные, в том числе и массив указателей, создаются динамически.

Работа с массивом указателей массив Массив указателей Элемент

операции извлечения из обычного массива

операции извлечения из массива указателей

сортировка
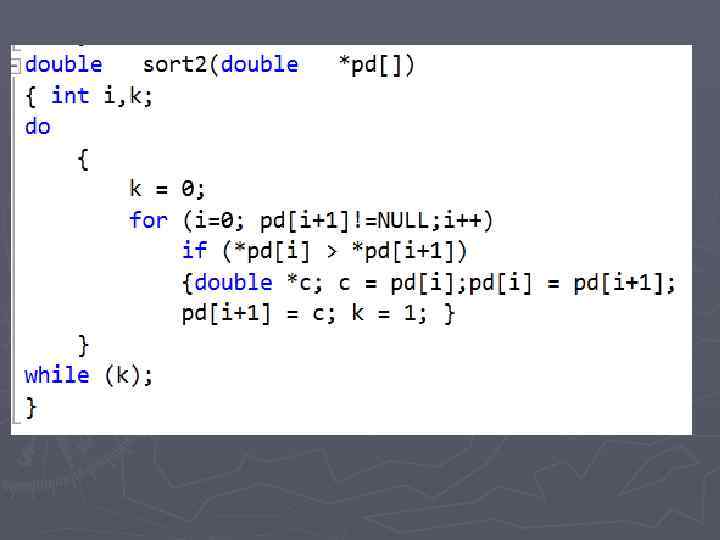
![конструкции: -pd[i] -i-й указатель в массиве; -*pd[i] -значение указуемой переменной по i-му указателю в](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-41.jpg "конструкции: -pd[i] -i-й указатель в массиве; -*pd[i] -значение указуемой переменной по i-му указателю в")
конструкции: -pd[i] -i-й указатель в массиве; -*pd[i] -значение указуемой переменной по i-му указателю в массиве.

Многоуровневые указатели

интерпритация double ► переменная, **pp; при косвенном обращении к которой получается указатель на переменную типа double, ► как указатель на указатель ► или адрес указателя

double **pp; 4 варианта структур данных ► -указатель на одиночный указатель на переменную типа double; ► -указатель на одиночный указатель на массив переменных типа double; ► -указатель на массив, содержащий указатели на одиночные переменные типа double; ► -указатель на массив, содержащий указатели на массивы переменных типа double.
![double* и double** и указатель-переменная double[] double *[] может ссылаться и на динамический массив](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-45.jpg "double* и double** и указатель-переменная double[] double *[] может ссылаться и на динамический массив")
double* и double** и указатель-переменная double[] double *[] может ссылаться и на динамический массив указателей, который создается во время работы программы под заданную размерность и указатель-константа статическая структура данных, размерность которой определяется при трансляции


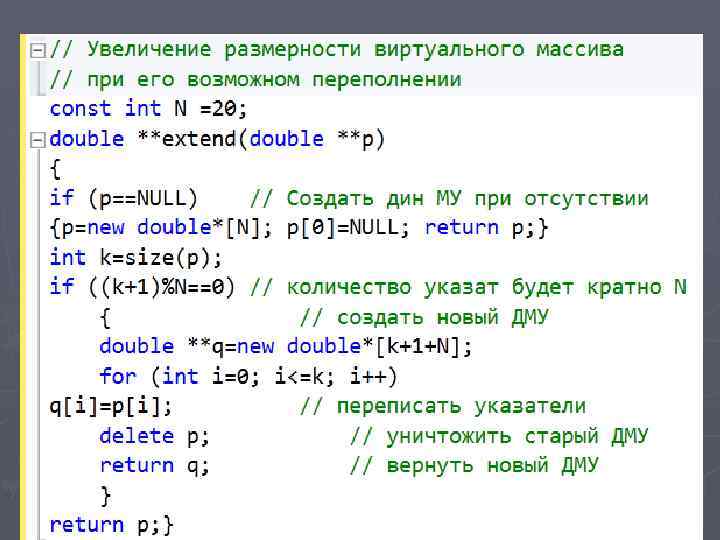
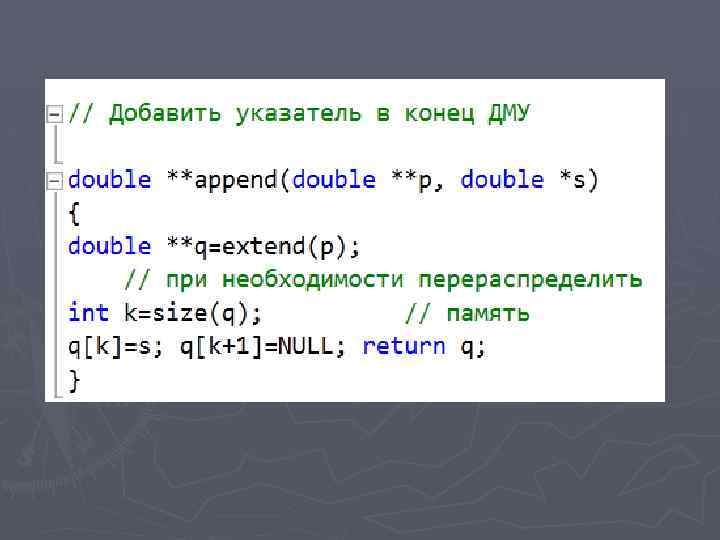
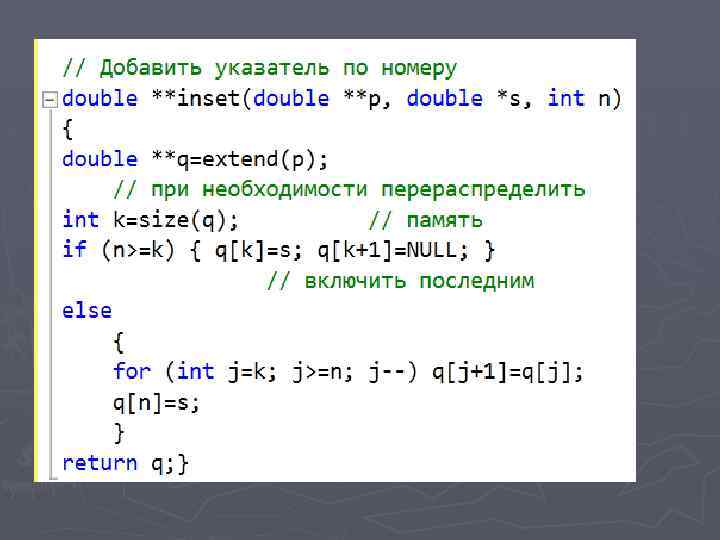
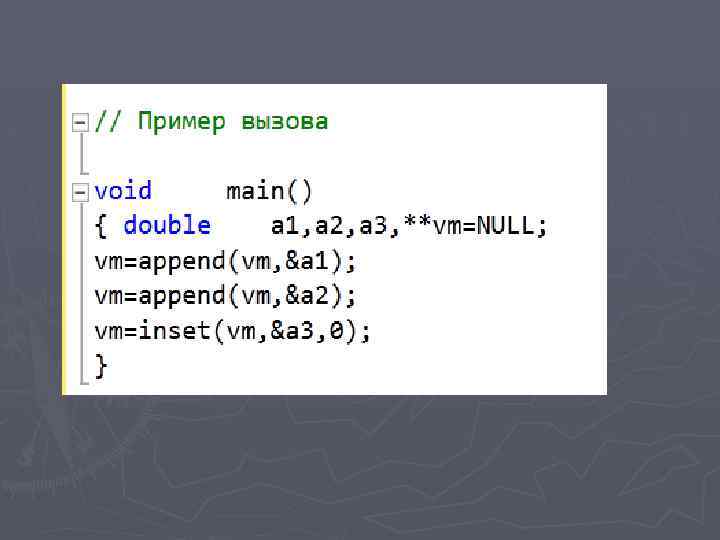
Динамические массивы указателей переменной размерности ► ВИРТУАЛЬНЫМ ► коллекцией МАССИВОМ

// Текущее количество указателей

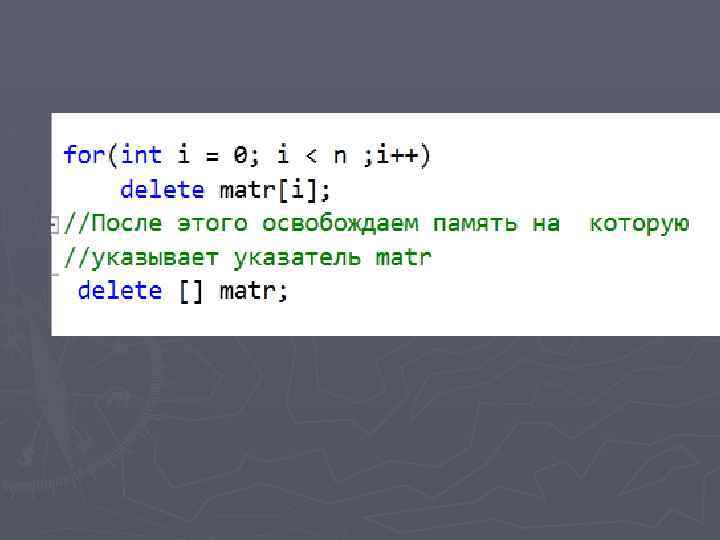
Динамические матрицы
![**matr[1] *matr[2] *matr[3] . . *matr[n]](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-54.jpg "**matr[1] *matr[2] *matr[3] . . *matr[n]")
**matr[1] *matr[2] *matr[3] . . *matr[n]
![Многоуровневые массивы указателей типы char*[] и char** char **pp[20]; char ***ppp;](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-56.jpg "Многоуровневые массивы указателей типы char*[] и char** char **pp[20]; char ***ppp;")
Многоуровневые массивы указателей типы char*[] и char** char **pp[20]; char ***ppp;
![Дуализм двумерного массива и массива указателей операции над массивом указателей на строки: char *p[20];](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-57.jpg "Дуализм двумерного массива и массива указателей операции над массивом указателей на строки: char *p[20];")
Дуализм двумерного массива и массива указателей операции над массивом указателей на строки: char *p[20]; p[i]++ *(p[i] + j) p[i][j]
![char *q, A[20][80]; q q = A; *(q + i*80 + j) // или](https://present5.com/presentation/3/78364820_143234709.pdf-img/78364820_143234709.pdf-58.jpg "char *q, A[20][80]; q q = A; *(q + i*80 + j) // или")
char *q, A[20][80]; q q = A; *(q + i*80 + j) // или q[i*80 + j]
oap_12_13(динамические переменные).ppt