

Present L4_15-Architecture.pptx
- Количество слайдов: 83

 PXI архитектура
PXI архитектура
 Пустое шасси PXI-платформы NI PXIe 1065. Шасси • позволяет разместить 17 модульных блоков. Первые 4 позиции • предназначены для контроллера. Рис. 17. 5 отражает компоновку платформы измерительными блоками. Внешний вид PXIплатформы NI PXIe 1065
Пустое шасси PXI-платформы NI PXIe 1065. Шасси • позволяет разместить 17 модульных блоков. Первые 4 позиции • предназначены для контроллера. Рис. 17. 5 отражает компоновку платформы измерительными блоками. Внешний вид PXIплатформы NI PXIe 1065
 МУЛЬТИМЕТРЫ • Модульные мультиметры используются для измерения постоянных и переменных тока и напряжения, сопротивления, емкости и индуктивности, частоты сигнала и его формы, а также для тестирования диодов. • Разумеется, набор функций зависит от сложности конкретного мультиметра. Традиционный и модульный мультиметры
МУЛЬТИМЕТРЫ • Модульные мультиметры используются для измерения постоянных и переменных тока и напряжения, сопротивления, емкости и индуктивности, частоты сигнала и его формы, а также для тестирования диодов. • Разумеется, набор функций зависит от сложности конкретного мультиметра. Традиционный и модульный мультиметры
 Основные параметры приборов • На примере мультиметра рассмотрим параметры этого прибора: • точность, • разрешение, • шум, • диапазон, • измерительный цикл
Основные параметры приборов • На примере мультиметра рассмотрим параметры этого прибора: • точность, • разрешение, • шум, • диапазон, • измерительный цикл
 ОСНОВНЫЕ ПОНЯТИЯ МУЛЬТИМЕТРОВ • ТОЧНОСТЬ • Точность мультиметра – это то, насколько близок показанный им сигнал к реальному, она определяется двумя составляющими: • точность = погрешность прибора + температурная погрешность • Погрешность прибора в инструкции обычно указывается следующими способами: • %(от показаний)+смещение • %(от показаний + от диапазона) • ± ppm (от показаний + от диапазона), Температурная погрешность должна учитываться только тогда, когда измерение происходит в температурном диапазоне, отличающемся от того, для которого мультиметр был откалиброван. Она вычисляется по следующей формуле: • температурная погрешность = k. T * d. T, • k. T = ppm (от показаний + от диапазона) / С°, d. T = текущая температура – температура калибровки.
ОСНОВНЫЕ ПОНЯТИЯ МУЛЬТИМЕТРОВ • ТОЧНОСТЬ • Точность мультиметра – это то, насколько близок показанный им сигнал к реальному, она определяется двумя составляющими: • точность = погрешность прибора + температурная погрешность • Погрешность прибора в инструкции обычно указывается следующими способами: • %(от показаний)+смещение • %(от показаний + от диапазона) • ± ppm (от показаний + от диапазона), Температурная погрешность должна учитываться только тогда, когда измерение происходит в температурном диапазоне, отличающемся от того, для которого мультиметр был откалиброван. Она вычисляется по следующей формуле: • температурная погрешность = k. T * d. T, • k. T = ppm (от показаний + от диапазона) / С°, d. T = текущая температура – температура калибровки.
 • Для примера расчета погрешности измерения рассмотрим мультиметр NI 4070, которым необходимо измерить постоянное напряжение в районе 5 В. Допустим, что последнюю его калибровку проводили при 23°C, и с тех пор прошло меньше двух лет. Из спецификации прибора имеем таблицу: Если температура, при которой проводятся измерения, лежит в пределах от 18° до 28° 100 м. В 1 В 100 В 300 В Разрешение 100 н. В 1 мк. В 2 года после калибровки, Т ± 5 °C Диапазон 90 дней после калибровки, Т ± 5°C 30 + 20 20 +6 20+6 30+20 40 + 20 25+6 35+6 35+20 k. Т, 1/°С (0°С – 50°С) Без само. С самокалибровки калибровкой 4+5 0. 3 + 0. 3 2+1 0. 3 + 0. 3 1+1 0. 3 + 0. 3 4+3 0. 3 + 0. 3
• Для примера расчета погрешности измерения рассмотрим мультиметр NI 4070, которым необходимо измерить постоянное напряжение в районе 5 В. Допустим, что последнюю его калибровку проводили при 23°C, и с тех пор прошло меньше двух лет. Из спецификации прибора имеем таблицу: Если температура, при которой проводятся измерения, лежит в пределах от 18° до 28° 100 м. В 1 В 100 В 300 В Разрешение 100 н. В 1 мк. В 2 года после калибровки, Т ± 5 °C Диапазон 90 дней после калибровки, Т ± 5°C 30 + 20 20 +6 20+6 30+20 40 + 20 25+6 35+6 35+20 k. Т, 1/°С (0°С – 50°С) Без само. С самокалибровки калибровкой 4+5 0. 3 + 0. 3 2+1 0. 3 + 0. 3 1+1 0. 3 + 0. 3 4+3 0. 3 + 0. 3
 • РАЗРЕШЕНИЕ • Для идеального мультиметра в отсутствии любых шумов разрешение – это такое мельчайшее изменение входного сигнала, которое приводит к изменению показаний прибора. • Разрешение можно выражать в битах или знаках. Если разрешение представлено в единицах размерности измеряемой величины, оно также называется квантом измерения. • Разрешение в битах равно битности аналого-цифрового преобразователя (АЦП) мультиметра. Пусть рабочий диапазон прибора – 10 В, а битность АЦП равна 12. • Тогда мультиметр способен внутри этого диапазона различить 212, то есть 4096 градаций сигнала. Таким образом, минимальное изменение сигнала, которое зарегистрирует мультиметр, будет равно 10 В/4096 = 2, 4 м. В. Это – квант измерения. • Чтобы выразить разрешение в знаках, нужно пользоваться следующей формулой: • разрешение в знаках = log 10(количество градаций сигнала) • Для мультиметра с 12 -битным АЦП разрешение в цифрах составит log 10(212)=3, 61.
• РАЗРЕШЕНИЕ • Для идеального мультиметра в отсутствии любых шумов разрешение – это такое мельчайшее изменение входного сигнала, которое приводит к изменению показаний прибора. • Разрешение можно выражать в битах или знаках. Если разрешение представлено в единицах размерности измеряемой величины, оно также называется квантом измерения. • Разрешение в битах равно битности аналого-цифрового преобразователя (АЦП) мультиметра. Пусть рабочий диапазон прибора – 10 В, а битность АЦП равна 12. • Тогда мультиметр способен внутри этого диапазона различить 212, то есть 4096 градаций сигнала. Таким образом, минимальное изменение сигнала, которое зарегистрирует мультиметр, будет равно 10 В/4096 = 2, 4 м. В. Это – квант измерения. • Чтобы выразить разрешение в знаках, нужно пользоваться следующей формулой: • разрешение в знаках = log 10(количество градаций сигнала) • Для мультиметра с 12 -битным АЦП разрешение в цифрах составит log 10(212)=3, 61.
 • Если температура, при которой проводятся измерения, лежит в пределах от 18° до 28°C (23± 5), то температурную погрешность можно не учитывать. Тогда для диапазона 10 В получаем значение 25+6 и рассчитываем точность: • точность = ± (25 ppm (от 5 В) + 6 ppm (от 10 В)) = ± 185 мк. В. • Учет температурной погрешности демонстрирует следующий пример, где аналогичные измерения проводятся при температуре 38°C: • точность = ± (25 ppm (от 5 В) + 6 ppm (от 10 В)) + [(1 ppm (от 5 В)+ 1 ppm (от 10 В))*(38 -(23+5))] = ± 335 мк. В.
• Если температура, при которой проводятся измерения, лежит в пределах от 18° до 28°C (23± 5), то температурную погрешность можно не учитывать. Тогда для диапазона 10 В получаем значение 25+6 и рассчитываем точность: • точность = ± (25 ppm (от 5 В) + 6 ppm (от 10 В)) = ± 185 мк. В. • Учет температурной погрешности демонстрирует следующий пример, где аналогичные измерения проводятся при температуре 38°C: • точность = ± (25 ppm (от 5 В) + 6 ppm (от 10 В)) + [(1 ppm (от 5 В)+ 1 ppm (от 10 В))*(38 -(23+5))] = ± 335 мк. В.
. Таким образом, для мультиметра") • разрешение в знаках = log 10(количество градаций сигнала). Таким образом, для мультиметра с 12 -битным АЦП разрешение в цифрах составит log 10(212)=3, 61. Традиционно, количество знаков точности прибора 3½ означает, что дисплей мультиметра отображает 3 полноценных знака (от 0 до 9) и один урезанный (0 или 1), то есть прибор может показать от -1999 до 1999. • Перевод аналогового сигнала в цифровую форму неизбежно влечет за собой внесение неточности, тем большей, чем меньше битность АЦП. Иллюстрация к возникновению ошибки квантования
• разрешение в знаках = log 10(количество градаций сигнала). Таким образом, для мультиметра с 12 -битным АЦП разрешение в цифрах составит log 10(212)=3, 61. Традиционно, количество знаков точности прибора 3½ означает, что дисплей мультиметра отображает 3 полноценных знака (от 0 до 9) и один урезанный (0 или 1), то есть прибор может показать от -1999 до 1999. • Перевод аналогового сигнала в цифровую форму неизбежно влечет за собой внесение неточности, тем большей, чем меньше битность АЦП. Иллюстрация к возникновению ошибки квантования
 •
•
 • Пусть для примера известно среднеквадратичное значение шума – 70 мк. В. Если диапазон работы мультиметра равен 10 В, то эффективное разрешение в знаках составит log 10(10/0, 00007)=5, 15. • Соотношение различных представлений разрешения представлено в сводной таблице. Обратите внимание, что количество знаков точности прибора – приближенная величина. Количество знаков точности 3½ 4½ 5½ 6½ 7½ Разрешение, знаков 3, 01 3, 61 4, 21 4, 81 5, 42 6, 02 6, 62 7, 22 Количество градаций сигнала 1024 4096 16384 65536 262144 1048576 4194304 16777216 Битность АЦП 10 12 14 16 18 20 22 24
• Пусть для примера известно среднеквадратичное значение шума – 70 мк. В. Если диапазон работы мультиметра равен 10 В, то эффективное разрешение в знаках составит log 10(10/0, 00007)=5, 15. • Соотношение различных представлений разрешения представлено в сводной таблице. Обратите внимание, что количество знаков точности прибора – приближенная величина. Количество знаков точности 3½ 4½ 5½ 6½ 7½ Разрешение, знаков 3, 01 3, 61 4, 21 4, 81 5, 42 6, 02 6, 62 7, 22 Количество градаций сигнала 1024 4096 16384 65536 262144 1048576 4194304 16777216 Битность АЦП 10 12 14 16 18 20 22 24
 • ШУМ • • Реальный сигнал всегда зашумлен. Кроме рассмотренных выше ошибок квантования можно перечислить следующие причины появления шума: • шумы сопротивлений; • шум при согласовании высокого сопротивления внешнего источника и входного сопротивления; • паразитные термо - ЭДС, возникающие в металлах при наличии перепадов температур; • падение напряжения на внутренней нагрузке; • диэлектрическое поглощение, обусловленное неспособностью конденсаторов разряжаться полностью; • самонагрев сопротивлений, проявляющийся тем больше, чем больше измеряемые токи. •
• ШУМ • • Реальный сигнал всегда зашумлен. Кроме рассмотренных выше ошибок квантования можно перечислить следующие причины появления шума: • шумы сопротивлений; • шум при согласовании высокого сопротивления внешнего источника и входного сопротивления; • паразитные термо - ЭДС, возникающие в металлах при наличии перепадов температур; • падение напряжения на внутренней нагрузке; • диэлектрическое поглощение, обусловленное неспособностью конденсаторов разряжаться полностью; • самонагрев сопротивлений, проявляющийся тем больше, чем больше измеряемые токи. •
 • ИЗМЕРИТЕЛЬНЫЙ ЦИКЛ • Каждый раз, производя измерение, мультиметр выполняет набор шагов, который называется измерительным циклом. время переключения калибровка АЦП установка нуля установка настроек измерение длительность измерения время измерения Время переключения необходимо для настройки внутренних аналоговых схем мультиметра для следующего измерения.
• ИЗМЕРИТЕЛЬНЫЙ ЦИКЛ • Каждый раз, производя измерение, мультиметр выполняет набор шагов, который называется измерительным циклом. время переключения калибровка АЦП установка нуля установка настроек измерение длительность измерения время измерения Время переключения необходимо для настройки внутренних аналоговых схем мультиметра для следующего измерения.
 • Калибровка АЦП производится для исключения ошибок, связанных с усилением сигнала. Мультиметр считывает сигнал встроенного высокоточного источника напряжения перед каждым измерением и сравнивает с известным значением, после чего корректирует значение коэффициента усиления. Калибровка АЦП удлиняет процесс измерения, поэтому ее можно не проводить каждый раз. • Установка нуля перед измерением необходима для того, чтобы компенсировать существующие в мультиметре постоянные паразитные сигналы. Прибор отключает внешний сигнал и проводит измерение, после чего вычитает полученное значение из всех последующих данных. • Установка настроек занимает определенное время, зависящее от типа измерения, его пределов, свойств соединяющих кабелей, входного сопротивления и других факторов. • Измерение состоит в многократном снятии показаний и их усреднении. Чем больше время усреднения – тем лучше разрешение, но меньше скорость считывания. •
• Калибровка АЦП производится для исключения ошибок, связанных с усилением сигнала. Мультиметр считывает сигнал встроенного высокоточного источника напряжения перед каждым измерением и сравнивает с известным значением, после чего корректирует значение коэффициента усиления. Калибровка АЦП удлиняет процесс измерения, поэтому ее можно не проводить каждый раз. • Установка нуля перед измерением необходима для того, чтобы компенсировать существующие в мультиметре постоянные паразитные сигналы. Прибор отключает внешний сигнал и проводит измерение, после чего вычитает полученное значение из всех последующих данных. • Установка настроек занимает определенное время, зависящее от типа измерения, его пределов, свойств соединяющих кабелей, входного сопротивления и других факторов. • Измерение состоит в многократном снятии показаний и их усреднении. Чем больше время усреднения – тем лучше разрешение, но меньше скорость считывания. •
 ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ • Для измерений постоянного и переменного напряжения, сопротивления по 2 х-проводной схеме, емкости, частоты и тестирования диодов ( для каждого модульного мультиметра набор измеряемых величин разный) надо использовать контакты HI и LO на передней панели прибора. • Измерение силы постоянного или переменного тока требует дополнительного высокоточного шунтирующего сопротивления. У некоторых мультиметров есть встроенный шунт, поэтому при измерениях вместо контакта HI используется отдельный разъем. • Переключать мультиметр в режим измерения тока до подключения его к контуру, а также выводить его из контура до выхода из режима измерения. • Следить за тем, чтобы характеристики измеряемого тока и напряжения не превышали максимально допустимые для конкретной модели мультиметра.
ПРОВЕДЕНИЕ ИЗМЕРЕНИЙ • Для измерений постоянного и переменного напряжения, сопротивления по 2 х-проводной схеме, емкости, частоты и тестирования диодов ( для каждого модульного мультиметра набор измеряемых величин разный) надо использовать контакты HI и LO на передней панели прибора. • Измерение силы постоянного или переменного тока требует дополнительного высокоточного шунтирующего сопротивления. У некоторых мультиметров есть встроенный шунт, поэтому при измерениях вместо контакта HI используется отдельный разъем. • Переключать мультиметр в режим измерения тока до подключения его к контуру, а также выводить его из контура до выхода из режима измерения. • Следить за тем, чтобы характеристики измеряемого тока и напряжения не превышали максимально допустимые для конкретной модели мультиметра.
 • Для измерений постоянного и переменного напряжения, сопротивления по 2 х-проводной схеме, емкости, частоты и тестирования диодов (надо помнить, что для каждого модульного мультиметра набор измеряемых величин разный) используйте контакты HI и LO на передней панели прибора. • Измерение силы постоянного или переменного тока требует дополнительного высокоточного шунтирующего сопротивления. У некоторых мультиметров есть встроенный шунт, поэтому при измерениях вместо контакта HI используется отдельный разъем. • Старайтесь переключать мультиметр в режим измерения тока до подключения его к контуру, а также выводить его из контура до выхода из режима измерения. • Нужно следить, чтобы характеристики измеряемого тока и напряжения не превышали максимально допустимые для конкретной модели мультиметра. • При измерении сопротивлений, не превышающих 100 к. Ом, 4 хпроводная схема оказывается более надежной, чем 2 х-проводная. Для того, чтобы ее использовать нужно подключить сопротивление к мультиметру с помощью двух пар контактов:
• Для измерений постоянного и переменного напряжения, сопротивления по 2 х-проводной схеме, емкости, частоты и тестирования диодов (надо помнить, что для каждого модульного мультиметра набор измеряемых величин разный) используйте контакты HI и LO на передней панели прибора. • Измерение силы постоянного или переменного тока требует дополнительного высокоточного шунтирующего сопротивления. У некоторых мультиметров есть встроенный шунт, поэтому при измерениях вместо контакта HI используется отдельный разъем. • Старайтесь переключать мультиметр в режим измерения тока до подключения его к контуру, а также выводить его из контура до выхода из режима измерения. • Нужно следить, чтобы характеристики измеряемого тока и напряжения не превышали максимально допустимые для конкретной модели мультиметра. • При измерении сопротивлений, не превышающих 100 к. Ом, 4 хпроводная схема оказывается более надежной, чем 2 х-проводная. Для того, чтобы ее использовать нужно подключить сопротивление к мультиметру с помощью двух пар контактов:
 Ток от прецизионного источника подается в этом случае через контакты HI и LO, а измерение напряжения ведется через контакты HI SENSE и LO SENSE, что исключает падение напряжения на подводящих контактах. • ОСНОВНЫЕ ХАРАКТЕРИСТИКИ • Максимальная частота оцифровки определяет скорость, с которой мультиметр может считывать данные. • Разрешение определяет точность измерений и подробно описывалось выше. • Полоса пропускания определяет диапазон частот, в котором возможно корректное измерение сигнала. • • ЛП «DMM SOFT FRONT PANEL»
Ток от прецизионного источника подается в этом случае через контакты HI и LO, а измерение напряжения ведется через контакты HI SENSE и LO SENSE, что исключает падение напряжения на подводящих контактах. • ОСНОВНЫЕ ХАРАКТЕРИСТИКИ • Максимальная частота оцифровки определяет скорость, с которой мультиметр может считывать данные. • Разрешение определяет точность измерений и подробно описывалось выше. • Полоса пропускания определяет диапазон частот, в котором возможно корректное измерение сигнала. • • ЛП «DMM SOFT FRONT PANEL»
 Измеряемые величины • • • - постоянное напряжение; - переменное напряжение; - постоянный ток; - переменный ток; - частота; - сопротивление по двухпроводной схеме; - сопротивление по четырехпроводной схеме; - емкость; - индуктивность; - тестирование диодов.
Измеряемые величины • • • - постоянное напряжение; - переменное напряжение; - постоянный ток; - переменный ток; - частота; - сопротивление по двухпроводной схеме; - сопротивление по четырехпроводной схеме; - емкость; - индуктивность; - тестирование диодов.
 • Проводит одиночное измерение и возвращает его результат. Инициализирует новую сессию работы с мультиметром.
• Проводит одиночное измерение и возвращает его результат. Инициализирует новую сессию работы с мультиметром.
 Итоговая блок-диаграмма
Итоговая блок-диаграмма
 ОДИНОЧНОЕ ИЗМЕРЕНИЕ
ОДИНОЧНОЕ ИЗМЕРЕНИЕ
 Генераторы сигналов Традиционный генератор сигналов Модульные генераторы сигналов используются повсеместно, начиная от простых задач тактирования и генерации синусоидальных сигналов, заканчивая сигналами сложной формы, полностью определяемыми разработчиком. ОСНОВНЫЕ ПОНЯТИЯ, ТИПЫ ГЕНЕРАТОРОВ В зависимости от объема памяти и особенностей устройства тактирующего механизма, генераторы можно разделить на два типа: генераторы функций (function generators) и генераторы произвольного сигнала (arbitrary waveform generators). Генераторы функций предназначены для генерации периодических сигналов с прецизионной частотой (лучше 1 мк. Гц). Эта частота может изменяться прямо в процессе генерации. Из-за периодичности сигнала генератор может иметь небольшой объем памяти, так как он должен хранить лишь один его период. Этим сигналом может быть как один из стандартных (синусоида, прямоугольный, треугольны сигналы), так и произвольно задаваемый разработчиком сигнал объемом до 16 тыс. точек.
Генераторы сигналов Традиционный генератор сигналов Модульные генераторы сигналов используются повсеместно, начиная от простых задач тактирования и генерации синусоидальных сигналов, заканчивая сигналами сложной формы, полностью определяемыми разработчиком. ОСНОВНЫЕ ПОНЯТИЯ, ТИПЫ ГЕНЕРАТОРОВ В зависимости от объема памяти и особенностей устройства тактирующего механизма, генераторы можно разделить на два типа: генераторы функций (function generators) и генераторы произвольного сигнала (arbitrary waveform generators). Генераторы функций предназначены для генерации периодических сигналов с прецизионной частотой (лучше 1 мк. Гц). Эта частота может изменяться прямо в процессе генерации. Из-за периодичности сигнала генератор может иметь небольшой объем памяти, так как он должен хранить лишь один его период. Этим сигналом может быть как один из стандартных (синусоида, прямоугольный, треугольны сигналы), так и произвольно задаваемый разработчиком сигнал объемом до 16 тыс. точек.
 • Генераторы произвольного сигнала сконструированы для генерации длинных и обычно сложных сигналов, поэтому они имеют большой (до 512 Мб) объем памяти и сложный тактирующий механизм, • ПРЯМОЙ ЦИФРОВОЙ СИНТЕЗ • Оба типа генераторов используют прямой цифровой синтез (direct digital synthesis). Суть данного метода в том, что один периодического сигнала или часть сложного непериодического записываются в буфер генератора (вмещающий 16384 точек), и затем в моменты, определяемые источником тактовых импульсов, происходит поточечная генерация сигнала:
• Генераторы произвольного сигнала сконструированы для генерации длинных и обычно сложных сигналов, поэтому они имеют большой (до 512 Мб) объем памяти и сложный тактирующий механизм, • ПРЯМОЙ ЦИФРОВОЙ СИНТЕЗ • Оба типа генераторов используют прямой цифровой синтез (direct digital synthesis). Суть данного метода в том, что один периодического сигнала или часть сложного непериодического записываются в буфер генератора (вмещающий 16384 точек), и затем в моменты, определяемые источником тактовых импульсов, происходит поточечная генерация сигнала:
 ПОСЛЕДОВАТЕЛЬНОСТИ СИГНАЛОВ • Современные модульные генераторы могут иметь достаточно большой объем памяти, однако он не безграничен. Для хранения произвольного сигнала длительностью в 1 секунду с частотой 1 МГц требуется 200 Мб памяти, поэтому средства оптимизации расхода памяти крайне важны. Одно из таких средств – использование последовательностей сигналов. • Разместив в памяти генератора отдельные «элементарные» сигналы, разработчик может создавать на их основе последовательности. В результате количество требуемой памяти для сложного, но имеющего одинаковые фрагменты сигнала значительно сокращается. • Для управления последовательностями существует несколько режимов запуска регистрации. .
ПОСЛЕДОВАТЕЛЬНОСТИ СИГНАЛОВ • Современные модульные генераторы могут иметь достаточно большой объем памяти, однако он не безграничен. Для хранения произвольного сигнала длительностью в 1 секунду с частотой 1 МГц требуется 200 Мб памяти, поэтому средства оптимизации расхода памяти крайне важны. Одно из таких средств – использование последовательностей сигналов. • Разместив в памяти генератора отдельные «элементарные» сигналы, разработчик может создавать на их основе последовательности. В результате количество требуемой памяти для сложного, но имеющего одинаковые фрагменты сигнала значительно сокращается. • Для управления последовательностями существует несколько режимов запуска регистрации. .
 • Самый простой режим, в котором требуется только один синхроимпульс") Одиночный запуск (Single Trigger) • Самый простой режим, в котором требуется только один синхроимпульс для запуска генерации всей последовательности. • Как видно из рисунка, последнее значение последнего сигнала последовательности генерируется до тех пор, пока прибором не будут получены дальнейшие указания:
Одиночный запуск (Single Trigger) • Самый простой режим, в котором требуется только один синхроимпульс для запуска генерации всей последовательности. • Как видно из рисунка, последнее значение последнего сигнала последовательности генерируется до тех пор, пока прибором не будут получены дальнейшие указания:
 • В режиме непрерывного запуска (Continuos Trigger) последовательность сигналов генерируется") Непрерывный запуск (Continuos Trigger) • В режиме непрерывного запуска (Continuos Trigger) последовательность сигналов генерируется постоянно. • После вывода последнего значения последовательности сразу же начинается генерация первого:
Непрерывный запуск (Continuos Trigger) • В режиме непрерывного запуска (Continuos Trigger) последовательность сигналов генерируется постоянно. • После вывода последнего значения последовательности сразу же начинается генерация первого:
 • В режиме пошагового запуска (Stepped Trigger) генерация каждого сигнала") Пошаговый запуск (Stepped Trigger) • В режиме пошагового запуска (Stepped Trigger) генерация каждого сигнала последовательности начинается по своему синхроимпульсу. Последнее значение каждого сигнала генерируется при этом до каждого нового синхроимпульса :
Пошаговый запуск (Stepped Trigger) • В режиме пошагового запуска (Stepped Trigger) генерация каждого сигнала последовательности начинается по своему синхроимпульсу. Последнее значение каждого сигнала генерируется при этом до каждого нового синхроимпульса :
 • Режим запуска (Burst Trigger) похож на пошаговый режим, отличие заключается в") (Burst Trigger) • Режим запуска (Burst Trigger) похож на пошаговый режим, отличие заключается в том, что каждый сигнал генерируется безостановочно до следующего синхроимпульса: Сигнальные последовательности определяются до запуска программы, и в этом ограничение их применимости. Для динамической перестройки последовательностей существует специальный скриптовый язык
(Burst Trigger) • Режим запуска (Burst Trigger) похож на пошаговый режим, отличие заключается в том, что каждый сигнал генерируется безостановочно до следующего синхроимпульса: Сигнальные последовательности определяются до запуска программы, и в этом ограничение их применимости. Для динамической перестройки последовательностей существует специальный скриптовый язык
 ИСКАЖЕНИЯ СИГНАЛОВ • При генерации сигнала он неизменно оказывается искажен. Одно из таких искажений - паразитные гармоники, являющиеся следствием несовершенства электроники прибора. • Степень их присутствия характеризуют коэффициентом нелинейных искажений, равным отношению среднеквадратичного напряжения суммы высших гармоник сигнала к напряжению первой гармоники при воздействии на вход устройства синусоидального сигнала. Этот коэффициент обычно измеряют в процентах. • Важная характеристика генератора (и многих других приборов), связанная с уровнем искажений – динамический диапазон, измеряющийся как отношение между максимальным и минимальным сигналами, которые могут быть сгенерированы одновременно. • Минимальный сигнал при этом определяется уровнем паразитных гармоник. Динамический диапазон измеряется в децибелах. Децибел — десятая часть бела, безразмерной единицы для измерения отношения некоторых величин по логарифмической шкале, 1 д. Б = 10*log 10(P 1/P 2).
ИСКАЖЕНИЯ СИГНАЛОВ • При генерации сигнала он неизменно оказывается искажен. Одно из таких искажений - паразитные гармоники, являющиеся следствием несовершенства электроники прибора. • Степень их присутствия характеризуют коэффициентом нелинейных искажений, равным отношению среднеквадратичного напряжения суммы высших гармоник сигнала к напряжению первой гармоники при воздействии на вход устройства синусоидального сигнала. Этот коэффициент обычно измеряют в процентах. • Важная характеристика генератора (и многих других приборов), связанная с уровнем искажений – динамический диапазон, измеряющийся как отношение между максимальным и минимальным сигналами, которые могут быть сгенерированы одновременно. • Минимальный сигнал при этом определяется уровнем паразитных гармоник. Динамический диапазон измеряется в децибелах. Децибел — десятая часть бела, безразмерной единицы для измерения отношения некоторых величин по логарифмической шкале, 1 д. Б = 10*log 10(P 1/P 2).
 Другое искажение, присущее генераторам – это фазовый шум. Оно приводит к тому, что энергия, которая должна быть сконцентрирована на конкретной частоте сигнала, «расплывается» в некотором диапазоне. На рисунке это выражается уширением спектра основной гармоники. Фазовый шум является следствием непостоянства частоты внутреннего тактирующего генератора прибора.
Другое искажение, присущее генераторам – это фазовый шум. Оно приводит к тому, что энергия, которая должна быть сконцентрирована на конкретной частоте сигнала, «расплывается» в некотором диапазоне. На рисунке это выражается уширением спектра основной гармоники. Фазовый шум является следствием непостоянства частоты внутреннего тактирующего генератора прибора.
 Амплитудно-частотная характеристика • Абсолютно всем генераторам свойственна тенденция генерировать одни частоты эффективнее других. • Это приводит к тому, что при попытке сгенерировать сигнал с абсолютно ровным спектром и при измерении этого спектра идеальным, не вносящим искажений анализатором, полученный спектр уже не будет ровным. • То, что получится, называется амплитудно-частотной характеристикой (АЧХ) прибора, пример изображен на рисунке:
Амплитудно-частотная характеристика • Абсолютно всем генераторам свойственна тенденция генерировать одни частоты эффективнее других. • Это приводит к тому, что при попытке сгенерировать сигнал с абсолютно ровным спектром и при измерении этого спектра идеальным, не вносящим искажений анализатором, полученный спектр уже не будет ровным. • То, что получится, называется амплитудно-частотной характеристикой (АЧХ) прибора, пример изображен на рисунке:
 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ • Частота обновления – это частота внутреннего тактирующего механизма, которая определяет максимальную частоту генерируемого сигнала и его горизонтальное разрешение. Горизонтальное разрешение крайне важно для быстро меняющихся сигналов. Для сигналов импульсного типа частота обновления генератора определяет минимально достижимую длину импульса.
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ • Частота обновления – это частота внутреннего тактирующего механизма, которая определяет максимальную частоту генерируемого сигнала и его горизонтальное разрешение. Горизонтальное разрешение крайне важно для быстро меняющихся сигналов. Для сигналов импульсного типа частота обновления генератора определяет минимально достижимую длину импульса.
 • Для примера, генератор произвольных сигналов с частотой обновления 100 МГц не может сгенерировать импульс короче 10 нс (1/(100*106 Гц)=10 -8 с=10 нс ).
• Для примера, генератор произвольных сигналов с частотой обновления 100 МГц не может сгенерировать импульс короче 10 нс (1/(100*106 Гц)=10 -8 с=10 нс ).
 • Разрешение цифро-аналогового преобразователя определяет вертикальное разрешение прибора, то есть точность генерации. Оно также влияет на уровень шумов квантования. • Количество памяти в генераторах произвольного сигнала определяет максимальную длину сигнала, который может быть сгенерирован. • Полоса частот вместе с частотой обновления определяет частотный диапазон, в котором сигнал может быть сгенерирован с определенной точностью. Конструкция выходного усилителя или применяемые фильтры могут ограничивать полосу частот.
• Разрешение цифро-аналогового преобразователя определяет вертикальное разрешение прибора, то есть точность генерации. Оно также влияет на уровень шумов квантования. • Количество памяти в генераторах произвольного сигнала определяет максимальную длину сигнала, который может быть сгенерирован. • Полоса частот вместе с частотой обновления определяет частотный диапазон, в котором сигнал может быть сгенерирован с определенной точностью. Конструкция выходного усилителя или применяемые фильтры могут ограничивать полосу частот.
 без применения какого-либо улучшения выглядит следующим образом") ФИЛЬТРАЦИЯ • Сигнал, сгенерированный цифро-аналоговым преобразователем (ЦАП) без применения какого-либо улучшения выглядит следующим образом Ступенчатая структура приводит к тому, что спектр такого сигнала кроме основной составляющей несет дополнительные гармоники, обусловленные конечной битностью и частотой дискретизации генератора:
ФИЛЬТРАЦИЯ • Сигнал, сгенерированный цифро-аналоговым преобразователем (ЦАП) без применения какого-либо улучшения выглядит следующим образом Ступенчатая структура приводит к тому, что спектр такого сигнала кроме основной составляющей несет дополнительные гармоники, обусловленные конечной битностью и частотой дискретизации генератора:
 Изначальная синусоида с частотой 20 МГц, сгенерированная с частотой дискретизации 100 МГц, «обогатилась» спектральными составляющими на частотах 100± 20 МГц, 200± 20 МГц и так далее, до бесконечности. Для устранения этих дефектов применяют цифровую и аналоговую фильтрацию.
Изначальная синусоида с частотой 20 МГц, сгенерированная с частотой дискретизации 100 МГц, «обогатилась» спектральными составляющими на частотах 100± 20 МГц, 200± 20 МГц и так далее, до бесконечности. Для устранения этих дефектов применяют цифровую и аналоговую фильтрацию.
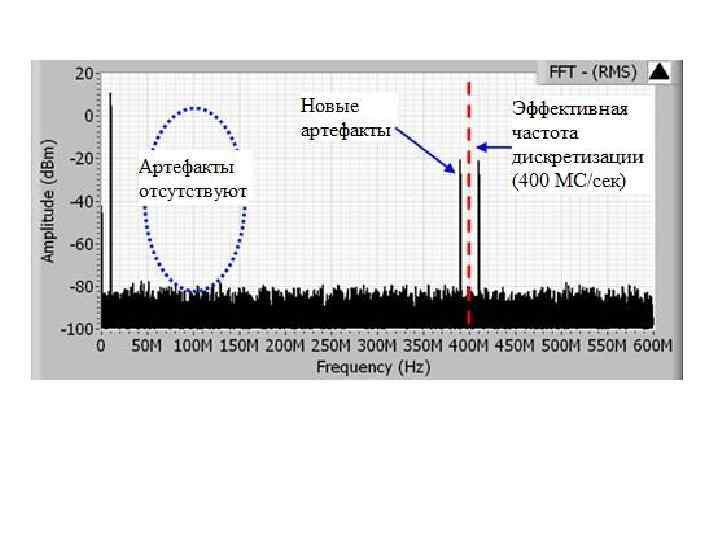
 ЦИФРОВАЯ ФИЛЬТРАЦИЯ • Цифровой фильтр, встроенный в генератор, увеличивает эффективную частоту дискретизации прибора, что приводит к сглаживанию сигнала на выходе, что хорошо работает с гладкими сигналами. Если же в сигнале присутствуют изломы (например, прямоугольный импульс), такое сглаживание также приводит к искажению. На рисунке синяя кривая соответствует 4 х-интерполяции, то есть увеличению эффективной частоты дискретизации в 4 раза. Результат в спектральном представлении состоит в переносе артефактов в высокочастотную область:
ЦИФРОВАЯ ФИЛЬТРАЦИЯ • Цифровой фильтр, встроенный в генератор, увеличивает эффективную частоту дискретизации прибора, что приводит к сглаживанию сигнала на выходе, что хорошо работает с гладкими сигналами. Если же в сигнале присутствуют изломы (например, прямоугольный импульс), такое сглаживание также приводит к искажению. На рисунке синяя кривая соответствует 4 х-интерполяции, то есть увеличению эффективной частоты дискретизации в 4 раза. Результат в спектральном представлении состоит в переносе артефактов в высокочастотную область:
 аналоговым") АНАЛОГОВАЯ ФИЛЬТРАЦИЯ • После применения цифрового фильтра сигнал готов для обработки низкочастотным (lowpass) аналоговым фильтром, который подавляет высокие частоты (обычно выше 154 МГц) и пропускает низкие. • Данный фильтр также противопоказан для сигналов, где высокочастотные компоненты являются полезными – в частности, для прямоугольного импульса. Однако для гладких сигналов его применение дает хороший результат, о чем свидетельствует следующее изображение.
АНАЛОГОВАЯ ФИЛЬТРАЦИЯ • После применения цифрового фильтра сигнал готов для обработки низкочастотным (lowpass) аналоговым фильтром, который подавляет высокие частоты (обычно выше 154 МГц) и пропускает низкие. • Данный фильтр также противопоказан для сигналов, где высокочастотные компоненты являются полезными – в частности, для прямоугольного импульса. Однако для гладких сигналов его применение дает хороший результат, о чем свидетельствует следующее изображение.
 ПРИЛОЖЕНИЕ «FGEN SOFT FRONT PANEL» Приложение поставляется вместе с драйверами NI FGEN и позволяет управлять основными функциями генератора без программирования. FGEN Soft Front Panel может работать в двух режимах: генерации стандартных функций и генерации произвольного сигнала. Для переключения между режимами нажимайте на соответствующие иконки рядом с надписью «Mode» .
ПРИЛОЖЕНИЕ «FGEN SOFT FRONT PANEL» Приложение поставляется вместе с драйверами NI FGEN и позволяет управлять основными функциями генератора без программирования. FGEN Soft Front Panel может работать в двух режимах: генерации стандартных функций и генерации произвольного сигнала. Для переключения между режимами нажимайте на соответствующие иконки рядом с надписью «Mode» .
 • Генерация в любом режиме начинается и останавливается с помощью кнопок • В режиме генерации стандартных функций (значок ) вы можете менять тип сигнала, а также его амплитуду (Amplitude p-p), частоту (Frequency), постоянную составляющую (DC Offset) и фазу (Phase • В режиме генерации произвольного сигнала (значок ) необходимо сначала загрузить сигнал в память генератора. Можно выбрать частоту, на которой будет происходить генерация (из вариантов, представленных в выпадающем списке «Waveform» ), а также загрузить не весь сигнал, а произвольную его часть. Для этого нужно выбрать в выпадающем списке «Import Type» значение «Import Subset» и указать номер начальной точки, а также длину экспортируемого участка. • Следует обратить внимание, что при использовании низкочастотного фильтра возникает задержка между синхроимпульсом запуска и началом Обратите внимание, что при использовании низкочастотного фильтра возникает задержка между синхроимпульсом запуска и началом генерации
• Генерация в любом режиме начинается и останавливается с помощью кнопок • В режиме генерации стандартных функций (значок ) вы можете менять тип сигнала, а также его амплитуду (Amplitude p-p), частоту (Frequency), постоянную составляющую (DC Offset) и фазу (Phase • В режиме генерации произвольного сигнала (значок ) необходимо сначала загрузить сигнал в память генератора. Можно выбрать частоту, на которой будет происходить генерация (из вариантов, представленных в выпадающем списке «Waveform» ), а также загрузить не весь сигнал, а произвольную его часть. Для этого нужно выбрать в выпадающем списке «Import Type» значение «Import Subset» и указать номер начальной точки, а также длину экспортируемого участка. • Следует обратить внимание, что при использовании низкочастотного фильтра возникает задержка между синхроимпульсом запуска и началом Обратите внимание, что при использовании низкочастотного фильтра возникает задержка между синхроимпульсом запуска и началом генерации
 Так, к примеру, выглядит сигнал из трех частей: синусоидального, прямоугольного и пилообразного сигналов. Амплитуда синусоиды – 1 В, остальных – 0, 5 В.
Так, к примеру, выглядит сигнал из трех частей: синусоидального, прямоугольного и пилообразного сигналов. Амплитуда синусоиды – 1 В, остальных – 0, 5 В.


 считывание начинается когда сигнал либо входит") В режиме оконного запуска (Window Trigger) считывание начинается когда сигнал либо входит
В режиме оконного запуска (Window Trigger) считывание начинается когда сигнал либо входит
 Запуск с запаздыванием по спаду происходит, когда сигнал сначала пересекает уровень напряжения на величину запаздывания больший установленного уровня, а потом доходит до самого уровня запуска:
Запуск с запаздыванием по спаду происходит, когда сигнал сначала пересекает уровень напряжения на величину запаздывания больший установленного уровня, а потом доходит до самого уровня запуска:
 позволяет осциллографу") • либо покидает пределы заданного окна Режим цифрового запуска (Digital Trigger) позволяет осциллографу запускаться по цифровому сигналу другого прибора, который может передаваться по шинам RTSI и PFI, а также по внутренней шине PXI. Режим Запуска с запаздыванием (Hysteresis Trigger) позволяет исключить ошибки запуска, связанные с зашумлением сигнала. Допустим, если измеряемый сигнал содержит два фронта с разными амплитудами, такой режим запуска делает возможным запуск только по одному фронту. Обычно величина запаздывания составляет 2, 5% от диапазона измерения, но ее можно менять. Запуск с запаздыванием по фронту происходит когда сигнал сначала пересекает уровень напряжения на величину запаздывания меньший установленного уровня, а потом доходит до самого уровня запуска:
• либо покидает пределы заданного окна Режим цифрового запуска (Digital Trigger) позволяет осциллографу запускаться по цифровому сигналу другого прибора, который может передаваться по шинам RTSI и PFI, а также по внутренней шине PXI. Режим Запуска с запаздыванием (Hysteresis Trigger) позволяет исключить ошибки запуска, связанные с зашумлением сигнала. Допустим, если измеряемый сигнал содержит два фронта с разными амплитудами, такой режим запуска делает возможным запуск только по одному фронту. Обычно величина запаздывания составляет 2, 5% от диапазона измерения, но ее можно менять. Запуск с запаздыванием по фронту происходит когда сигнал сначала пересекает уровень напряжения на величину запаздывания меньший установленного уровня, а потом доходит до самого уровня запуска:
 • Если же синхроимпульсы приходят, когда у сигнала разная фаза, тогда изображения будут накладываться, итоговый сигнал на осциллографе будет «бежать» . Синхроимпульсы время сбора Итог
• Если же синхроимпульсы приходят, когда у сигнала разная фаза, тогда изображения будут накладываться, итоговый сигнал на осциллографе будет «бежать» . Синхроимпульсы время сбора Итог


 • Отсутствие инжекции заряда. В случае мультиплексирования на высоких частотах оцифровки возможна ситуация, когда емкости мультиплексора не успевают разряжаться. Это приводит к тому, что остатки заряда оказывают влияние на измерение в другом канале, что приводит к шумам или даже появлению сигналовпризраков.
• Отсутствие инжекции заряда. В случае мультиплексирования на высоких частотах оцифровки возможна ситуация, когда емкости мультиплексора не успевают разряжаться. Это приводит к тому, что остатки заряда оказывают влияние на измерение в другом канале, что приводит к шумам или даже появлению сигналовпризраков.
 Осциллографы • Осциллографы применяются во множестве задач, где необходимо измерять быстро меняющиеся сигналы. Вот только некоторые примеры подобных областей: тестирование кабелей и каналов связи, анализ видеосигнала, проверка импульсных источников питания, ультразвуковое тестирование материалов. • Традиционные осциллографы
Осциллографы • Осциллографы применяются во множестве задач, где необходимо измерять быстро меняющиеся сигналы. Вот только некоторые примеры подобных областей: тестирование кабелей и каналов связи, анализ видеосигнала, проверка импульсных источников питания, ультразвуковое тестирование материалов. • Традиционные осциллографы
 ОСНОВНЫЕ ПОНЯТИЯ • Осциллограф предназначен для наблюдения • • формы быстро меняющегося сигнала. Действие- в определенный момент времени запускается считывание сигнала с указанной частотой (современные осциллографы могут работать на частотах в несколько ГГц). Производится несколько измерений, число которых задано в настройках. Получившееся изображение сигнала, условно говоря, выводится на экран (разумеется, если за сигналом не нужно наблюдать человеку, то никакого экрана может не быть). После этого осциллограф переходит в режим ожидания синхроимпульса.
ОСНОВНЫЕ ПОНЯТИЯ • Осциллограф предназначен для наблюдения • • формы быстро меняющегося сигнала. Действие- в определенный момент времени запускается считывание сигнала с указанной частотой (современные осциллографы могут работать на частотах в несколько ГГц). Производится несколько измерений, число которых задано в настройках. Получившееся изображение сигнала, условно говоря, выводится на экран (разумеется, если за сигналом не нужно наблюдать человеку, то никакого экрана может не быть). После этого осциллограф переходит в режим ожидания синхроимпульса.
 • Если сигнал периодический и синхроимпульс приходит в моменты одинаковой фазы сигнала – изображения, полученные осциллографом, будут совпадать: •
• Если сигнал периодический и синхроимпульс приходит в моменты одинаковой фазы сигнала – изображения, полученные осциллографом, будут совпадать: •
 • Частота оцифровки и количество считываемых после синхроимпульса точек называются параметрами горизонтальной развертки. Уровень усиления сигнала и его сдвиг – параметрами вертикальной развертки. СИНХРОННЫЙ ЗАПУСК По умолчанию модульные осциллографы начинают считывание сразу же после конфигурации (Immediate Trigger), однако с помощью различных режимов запуска можно контролировать этот момент. При программном запуске (Software Trigger) осциллограф после конфигурации не запускает считывание сразу, а ждет программного сигнала. Режим запуска по фронту (Edge Trigger) начинает считывание в том случае, если сигнал пересекает заданный уровень в определенном направлении:
• Частота оцифровки и количество считываемых после синхроимпульса точек называются параметрами горизонтальной развертки. Уровень усиления сигнала и его сдвиг – параметрами вертикальной развертки. СИНХРОННЫЙ ЗАПУСК По умолчанию модульные осциллографы начинают считывание сразу же после конфигурации (Immediate Trigger), однако с помощью различных режимов запуска можно контролировать этот момент. При программном запуске (Software Trigger) осциллограф после конфигурации не запускает считывание сразу, а ждет программного сигнала. Режим запуска по фронту (Edge Trigger) начинает считывание в том случае, если сигнал пересекает заданный уровень в определенном направлении:
 • При заданной частоте обновления максимальная корректно детектируемая частота называется частотой Найквиста, она равна половине частоты обновления. Если какая-либо спектральная компонента превышает это значение, в результате измерения она будет неверно отображена в диапазоне от нуля до частоты Найквиста. Во временном представлении это может вести к пропаданию быстрых особенностей или искажениям формы сигнала. • Чтобы избежать подобных ошибок, нужно увеличить частоту измерений так, чтобы она в два раза превышала максимальную частоту в спектре сигнала. Если это невозможно, необходимо воспользоваться аппаратным низкочастотным фильтром, подавляющим высокие частоты. Необходимо помнить, что аналогичный программный фильтр не будет давать результатов, так как он будет действовать на измеренный сигнал, уже содержащий ошибки.
• При заданной частоте обновления максимальная корректно детектируемая частота называется частотой Найквиста, она равна половине частоты обновления. Если какая-либо спектральная компонента превышает это значение, в результате измерения она будет неверно отображена в диапазоне от нуля до частоты Найквиста. Во временном представлении это может вести к пропаданию быстрых особенностей или искажениям формы сигнала. • Чтобы избежать подобных ошибок, нужно увеличить частоту измерений так, чтобы она в два раза превышала максимальную частоту в спектре сигнала. Если это невозможно, необходимо воспользоваться аппаратным низкочастотным фильтром, подавляющим высокие частоты. Необходимо помнить, что аналогичный программный фильтр не будет давать результатов, так как он будет действовать на измеренный сигнал, уже содержащий ошибки.
 Ошибки оцифровки • Измерение быстро меняющегося сигнала сопряжено с большим количеством трудностей. Одной из них являются ошибки, связанные с недостаточной частотой измерения прибора. Эффект, возникающий при этом, называется наложением частот (aliasing): (1) (2) – достаточная частота, – недостаточная частота измерений
Ошибки оцифровки • Измерение быстро меняющегося сигнала сопряжено с большим количеством трудностей. Одной из них являются ошибки, связанные с недостаточной частотой измерения прибора. Эффект, возникающий при этом, называется наложением частот (aliasing): (1) (2) – достаточная частота, – недостаточная частота измерений
 для каждого канала, хотя") ОДНОВРЕМЕННАЯ ОЦИФРОВКА • Обычно осциллографы используют отдельный аналоговоцифровой преобразователь (АЦП) для каждого канала, хотя иногда используется мультиплексирование - разделение одного АЦП на все каналы. Последний способ, безусловно, экономичнее (и дешевле), но у первого имеется ряд существенных преимуществ: • Более высокая частота оцифровки. Действительно, разделение одного АЦП на несколько каналов приводит к соответственному уменьшению частоты оцифровки: если для одного канала она составляет 100 Мсемплов/с, то для двух – 50 Мсемплов/с, для трех – уже 33 Мсемпла/с. Отдельный АЦП для каждого канала позволяет снимать сигнал на максимальной частоте в независимости от количества каналов. • Меньшая фазовая ошибка – при мультиплексировании сигнал каждого канала снимается через не совсем равные промежутки времени, что приводит к неаккуратному измерению фазы сигнала.
ОДНОВРЕМЕННАЯ ОЦИФРОВКА • Обычно осциллографы используют отдельный аналоговоцифровой преобразователь (АЦП) для каждого канала, хотя иногда используется мультиплексирование - разделение одного АЦП на все каналы. Последний способ, безусловно, экономичнее (и дешевле), но у первого имеется ряд существенных преимуществ: • Более высокая частота оцифровки. Действительно, разделение одного АЦП на несколько каналов приводит к соответственному уменьшению частоты оцифровки: если для одного канала она составляет 100 Мсемплов/с, то для двух – 50 Мсемплов/с, для трех – уже 33 Мсемпла/с. Отдельный АЦП для каждого канала позволяет снимать сигнал на максимальной частоте в независимости от количества каналов. • Меньшая фазовая ошибка – при мультиплексировании сигнал каждого канала снимается через не совсем равные промежутки времени, что приводит к неаккуратному измерению фазы сигнала.
 • Частота оцифровки - одна из главных характеристик осциллографа при его выборе. Высокая частота дискретизации важна при спектральном исследовании сигнала и там, где важна точность воспроизведения его формы. Большинство модульных осциллографов может работать на разных частотах оцифровки, определяемых максимальной. Таким образом осциллограф с максимальной частотой оцифровки 100 МГц может работать на частоте 100/2=50 МГц, 100/3=33 МГц и так далее. • Разрешение важно для как можно более точной передачи формы слабых сигналов. • время измерения (с) = количество памяти (точек)/частоты оцифровки (Гц) • Полоса частот определяет диапазон, в котором возможно корректное измерение сигнала. • Равномерность в полосе частот важна при измерении сигналов с широким спектром. Из-за плохой равномерности такой сигнал может быть значительно искажен в процессе измерения.
• Частота оцифровки - одна из главных характеристик осциллографа при его выборе. Высокая частота дискретизации важна при спектральном исследовании сигнала и там, где важна точность воспроизведения его формы. Большинство модульных осциллографов может работать на разных частотах оцифровки, определяемых максимальной. Таким образом осциллограф с максимальной частотой оцифровки 100 МГц может работать на частоте 100/2=50 МГц, 100/3=33 МГц и так далее. • Разрешение важно для как можно более точной передачи формы слабых сигналов. • время измерения (с) = количество памяти (точек)/частоты оцифровки (Гц) • Полоса частот определяет диапазон, в котором возможно корректное измерение сигнала. • Равномерность в полосе частот важна при измерении сигналов с широким спектром. Из-за плохой равномерности такой сигнал может быть значительно искажен в процессе измерения.
 ПРИЛОЖЕНИЕ «SCOPE SOFT FRONT PANEL» • Данное приложение поставляется вместе с драйверами NI Scope (его можно вызвать через Пуск>Программы->National Instruments->NI-SCOPE>SCOPE Soft Front Panel) и позволяет управлять основными функциями осциллографа без программирования. Фактически это – полная замена традиционного осциллографа.
ПРИЛОЖЕНИЕ «SCOPE SOFT FRONT PANEL» • Данное приложение поставляется вместе с драйверами NI Scope (его можно вызвать через Пуск>Программы->National Instruments->NI-SCOPE>SCOPE Soft Front Panel) и позволяет управлять основными функциями осциллографа без программирования. Фактически это – полная замена традиционного осциллографа.
 Вопросы • 1. Пусть на вход поступает прямоугольный сигнал также с частотой 100 МГц. Установите частоту оцифровки осциллографа 100 МГц. Убедитесь, что форма регистрируемого сигнала имеет правильный прямоугольный вид. • Вопрос Почему при уменьшении частоты оцифровки форма сигнала искажается? Частота оцифровки = 5 МГц Частота оцифровки = 100 МГц
Вопросы • 1. Пусть на вход поступает прямоугольный сигнал также с частотой 100 МГц. Установите частоту оцифровки осциллографа 100 МГц. Убедитесь, что форма регистрируемого сигнала имеет правильный прямоугольный вид. • Вопрос Почему при уменьшении частоты оцифровки форма сигнала искажается? Частота оцифровки = 5 МГц Частота оцифровки = 100 МГц
 Запустите ВП, • - на входе – синусоида , f") • 2. ) Запустите ВП, • - на входе – синусоида , f =1 МГц, установлен запуск по фронту • Меняя частоту оцифровки в районе 2 МГц и наблюдаем спектр синусоиды. • Вопрос Почему пик, соответствующей правильной частоте 1 МГц, начинает смещаться, когда частота оцифровки становится меньше 2 МГц ? .
• 2. ) Запустите ВП, • - на входе – синусоида , f =1 МГц, установлен запуск по фронту • Меняя частоту оцифровки в районе 2 МГц и наблюдаем спектр синусоиды. • Вопрос Почему пик, соответствующей правильной частоте 1 МГц, начинает смещаться, когда частота оцифровки становится меньше 2 МГц ? .
 УСТРОЙСТВА ЦИФРОВОГО ВВОДА-ВЫВОДА • Устройства цифрового ввода-вывода широко применяются для взаимодействия с другими цифровыми приборами, например, программируемыми чипами, АЦП и ЦАП. Кроме этого, они используются в аналоговых измерениях напряжения. Большое количество линий ввода-вывода позволяет при этом создать экономичную (пусть и не высокоточную) измерительную систему. Еще одним применением устройств цифрового ввода -вывода является контроль качества передачи данных по линиям связи. •
УСТРОЙСТВА ЦИФРОВОГО ВВОДА-ВЫВОДА • Устройства цифрового ввода-вывода широко применяются для взаимодействия с другими цифровыми приборами, например, программируемыми чипами, АЦП и ЦАП. Кроме этого, они используются в аналоговых измерениях напряжения. Большое количество линий ввода-вывода позволяет при этом создать экономичную (пусть и не высокоточную) измерительную систему. Еще одним применением устройств цифрового ввода -вывода является контроль качества передачи данных по линиям связи. •
 ОСНОВНЫЕ ХАРАКТЕРИСТИКИ УЦВВ • Скорость передачи данных у устройств цифрового ввода-вывода может достигать 400 Мб/с. • Количество каналов определяет максимальное количество используемых в задаче цифровых линий (до 32). Чем больше каналов, тем больше можно проводить параллельных измерений. • Глубина памяти. Цифровые платы ввода-вывода имеют встроенный буфер, который позволяет хранить данные, предназначенные для отправки на компьютер или для генерации в цифровых линиях. Величина буфера определяет максимальную длину измеряемого или генерируемого сигнала. Обычно каждый канал имеет свой собственный буфер данных (до 128 Мб). •
ОСНОВНЫЕ ХАРАКТЕРИСТИКИ УЦВВ • Скорость передачи данных у устройств цифрового ввода-вывода может достигать 400 Мб/с. • Количество каналов определяет максимальное количество используемых в задаче цифровых линий (до 32). Чем больше каналов, тем больше можно проводить параллельных измерений. • Глубина памяти. Цифровые платы ввода-вывода имеют встроенный буфер, который позволяет хранить данные, предназначенные для отправки на компьютер или для генерации в цифровых линиях. Величина буфера определяет максимальную длину измеряемого или генерируемого сигнала. Обычно каждый канал имеет свой собственный буфер данных (до 128 Мб). •
 Цифровые сигналы – это электрические сигналы, передающие цифровые данные по проводам. Такие сигналы обычно имеют два состояния: 0 и 1. Для того чтобы связать эти состояния с конкретными значениями напряжения, используют различные стандарты. В стандартах, использующих для каждой цифровой линии один провод (Single-ended Digital Standarts), напряжение задается относительно «земли» . Широко использующийся стандарт TTL (Transistor-to-Transistor Logic) предписывает для « 0» значение напряжения от 0 до 0, 8 В, для « 1» - от 2 до 5 В.
Цифровые сигналы – это электрические сигналы, передающие цифровые данные по проводам. Такие сигналы обычно имеют два состояния: 0 и 1. Для того чтобы связать эти состояния с конкретными значениями напряжения, используют различные стандарты. В стандартах, использующих для каждой цифровой линии один провод (Single-ended Digital Standarts), напряжение задается относительно «земли» . Широко использующийся стандарт TTL (Transistor-to-Transistor Logic) предписывает для « 0» значение напряжения от 0 до 0, 8 В, для « 1» - от 2 до 5 В.
 используется по два провода на каждую") • В дифференциальных стандартах (Differential Digital Standarts) используется по два провода на каждую цифровую линию. Для передачи разных состояний используют разницу напряжений на этих проводах. При смене состояний эта разность обычно меняет знак. Такой способ передачи данных имеет более высокую помехозащищенность. При программном вводе-выводе команды на обновление данных отдаются через программный интерфейс. Задержки между командой и ее выполнением определяются операционной системой, мощностью компьютера, текущими задачами и могут достигать секунд. Такой способ передачи данных, безусловно, является самым простым, однако он применим только для некритичных ко времени задач.
• В дифференциальных стандартах (Differential Digital Standarts) используется по два провода на каждую цифровую линию. Для передачи разных состояний используют разницу напряжений на этих проводах. При смене состояний эта разность обычно меняет знак. Такой способ передачи данных имеет более высокую помехозащищенность. При программном вводе-выводе команды на обновление данных отдаются через программный интерфейс. Задержки между командой и ее выполнением определяются операционной системой, мощностью компьютера, текущими задачами и могут достигать секунд. Такой способ передачи данных, безусловно, является самым простым, однако он применим только для некритичных ко времени задач.
 • Фазовый сдвиг может стать серьезной проблемой, если необходимо выполнить два действия строго одновременно. Он имеет множество причин. При программной синхронизации значительная задержка возникает между временами начала выполнения задач. При снятии данных с разных каналов одного и того же прибора фазовый сдвиг возникает, если каналы имеют разные тактирующие устройства. • Даже при использовании синхронизирующей схемы фазовый сдвиг может появляться из-за разной длины соединяющих устройства и схему кабелей, так как скорость распространения сигнала по ним конечна (она составляет приблизительно две трети от скорости света в вакууме). Разница кабелей в один метр соответствует сдвигу примерно на 2, 2 нс.
• Фазовый сдвиг может стать серьезной проблемой, если необходимо выполнить два действия строго одновременно. Он имеет множество причин. При программной синхронизации значительная задержка возникает между временами начала выполнения задач. При снятии данных с разных каналов одного и того же прибора фазовый сдвиг возникает, если каналы имеют разные тактирующие устройства. • Даже при использовании синхронизирующей схемы фазовый сдвиг может появляться из-за разной длины соединяющих устройства и схему кабелей, так как скорость распространения сигнала по ним конечна (она составляет приблизительно две трети от скорости света в вакууме). Разница кабелей в один метр соответствует сдвигу примерно на 2, 2 нс.
 СИНХРОНИЗАЦИЯ • Синхронизация – это механизм, позволяющий двум или нескольким приборам проводить какие-либо действия одновременно, к примеру, считывать данные и генерировать сигнал. Синхронизация крайне важна для многих измерений. К примеру, если вы пытаетесь характеризовать контур с током, вы должны измерить ток в нескольких точках одновременно. Измерения в этом случае должны происходить синхронно, иначе за время разницы состояние контура изменится и полученная информация будет бессмысленна . • ОШИБКИ СИНХРОНИЗАЦИИ В процессе синхронизации приборов обязательно возникнут ошибки разных типов. Полностью исключить их невозможно, однако правильное использование средств синхронизации позволит свести их к минимуму. Задержка между началом работы разных приборов или синхроимпульсами – результат фазового сдвига (skew). Для примера, если два устройства оцифровывают один и тот же периодический сигнал с одинаковой частотой, фазовый сдвиг – это временная разница между двумя измеренными сигналами:
СИНХРОНИЗАЦИЯ • Синхронизация – это механизм, позволяющий двум или нескольким приборам проводить какие-либо действия одновременно, к примеру, считывать данные и генерировать сигнал. Синхронизация крайне важна для многих измерений. К примеру, если вы пытаетесь характеризовать контур с током, вы должны измерить ток в нескольких точках одновременно. Измерения в этом случае должны происходить синхронно, иначе за время разницы состояние контура изменится и полученная информация будет бессмысленна . • ОШИБКИ СИНХРОНИЗАЦИИ В процессе синхронизации приборов обязательно возникнут ошибки разных типов. Полностью исключить их невозможно, однако правильное использование средств синхронизации позволит свести их к минимуму. Задержка между началом работы разных приборов или синхроимпульсами – результат фазового сдвига (skew). Для примера, если два устройства оцифровывают один и тот же периодический сигнал с одинаковой частотой, фазовый сдвиг – это временная разница между двумя измеренными сигналами:
 • Прерывания – это механизм, позволяющий устройствам цифрового ввода-вывода посылать сообщения процессору. При срабатывании прерывания процессор оставляет свои текущие задачи и переключается на управление устройством ввода-вывода. Данный механизм обеспечивает меньшую задержку перед началом выполнения команд по сравнению с механизмом программного ввода-вывода. Однако подобные прерывания процессору посылает множество других системных устройств (например, мышь), поэтому задержки все равно могут возникать. • Прямой доступ к памяти (Direct Memory Access, DMA) позволяет передавать данные между системной памятью и буфером устройства напрямую, миную контроль процессора. Это позволяет избежать задержек, связанных с занятостью процессора другими задачами.
• Прерывания – это механизм, позволяющий устройствам цифрового ввода-вывода посылать сообщения процессору. При срабатывании прерывания процессор оставляет свои текущие задачи и переключается на управление устройством ввода-вывода. Данный механизм обеспечивает меньшую задержку перед началом выполнения команд по сравнению с механизмом программного ввода-вывода. Однако подобные прерывания процессору посылает множество других системных устройств (например, мышь), поэтому задержки все равно могут возникать. • Прямой доступ к памяти (Direct Memory Access, DMA) позволяет передавать данные между системной памятью и буфером устройства напрямую, миную контроль процессора. Это позволяет избежать задержек, связанных с занятостью процессора другими задачами.
.") Обычно инструкция к прибору содержит возможную величину сноса, которая выражается в ppm (миллионных долях). Для примера, тактирующее устройство с частотой 100 МГц и величиной сноса 25 ppm в действительности имеет частоту 100 МГц ± 2, 5 к. Гц. Если два устройства с такой частотой оцифровки работают одну секунду, итоговый сдвиг сигналов может достигать 50 мкс. Быстрые случайные флуктуации тактирующего сигнала ведут к дрожанию (Jitter). Дрожание подобно сносу, однако в отличие от него имеет некумулятивный эффект. Дрожание может вызываться различными причинами, например, шумами в соединительных проводах.
Обычно инструкция к прибору содержит возможную величину сноса, которая выражается в ppm (миллионных долях). Для примера, тактирующее устройство с частотой 100 МГц и величиной сноса 25 ppm в действительности имеет частоту 100 МГц ± 2, 5 к. Гц. Если два устройства с такой частотой оцифровки работают одну секунду, итоговый сдвиг сигналов может достигать 50 мкс. Быстрые случайные флуктуации тактирующего сигнала ведут к дрожанию (Jitter). Дрожание подобно сносу, однако в отличие от него имеет некумулятивный эффект. Дрожание может вызываться различными причинами, например, шумами в соединительных проводах.
 • Так как дрожание имеет случайную природу, наблюдать его во временном представлении достаточно сложно. Однако в спектральном представлении оно проявляется как фазовый шум – «растекание» энергии сигнала. На приведенном ниже рисунке показан спектр синусоидального сигнала, уширенный из -за дрожания частоты тактирования
• Так как дрожание имеет случайную природу, наблюдать его во временном представлении достаточно сложно. Однако в спектральном представлении оно проявляется как фазовый шум – «растекание» энергии сигнала. На приведенном ниже рисунке показан спектр синусоидального сигнала, уширенный из -за дрожания частоты тактирования
 МЕТОДЫ СИНХРОНИЗАЦИИ • Для синхронизации нескольких приборов между собой существуют такие методы, как программная синхронизация, общий синхроимпульс, общее тактирование, использование контура согласования фаз и тактирование синхроимпульсами. • Программная синхронизация – простейший метод, состоящий в управлении устройствами через программные события. Этот способ ведет к возникновению значительных временных задержек. Обычно программы, управляющие сбором данных, имеют крайне незначительный контроль над временем исполнения своих задач (особенно в таких операционных системах, как семейство Windows). Характерная точность программной синхронизации – миллисекунды, причем она зависит от аппаратных возможностей компьютера, а также программного обеспечения, выполняющегося в это же время. Даже если программа запускает несколько устройств одновременно, в действительности они стартуют с разницей в пределах тех же нескольких миллисекунд. Программная синхронизация также порождает дрожание и снос, однако эти эффекты несущественны по сравнению со значительным сдвигом
МЕТОДЫ СИНХРОНИЗАЦИИ • Для синхронизации нескольких приборов между собой существуют такие методы, как программная синхронизация, общий синхроимпульс, общее тактирование, использование контура согласования фаз и тактирование синхроимпульсами. • Программная синхронизация – простейший метод, состоящий в управлении устройствами через программные события. Этот способ ведет к возникновению значительных временных задержек. Обычно программы, управляющие сбором данных, имеют крайне незначительный контроль над временем исполнения своих задач (особенно в таких операционных системах, как семейство Windows). Характерная точность программной синхронизации – миллисекунды, причем она зависит от аппаратных возможностей компьютера, а также программного обеспечения, выполняющегося в это же время. Даже если программа запускает несколько устройств одновременно, в действительности они стартуют с разницей в пределах тех же нескольких миллисекунд. Программная синхронизация также порождает дрожание и снос, однако эти эффекты несущественны по сравнению со значительным сдвигом
 • Общий синхроимпульс – форма аппаратной синхронизации. При ней несколько устройств могут стартовать или выполнять другие задачи, по общему синхроимпульсу. Одно из устройств при этом считается главным и контролирует синхроимпульс. Оно генерирует этот сигнал одновременно с началом выполнения какой-либо задачи. Ведомые устройства начинают выполнять свои задачи сразу же по получении синхроимпульса. Из-за того что сигналу нужно пройти до устройств через провода разной длины, такая синхронизация не исключает возникновения задержек, однако они существенно меньше программных. Для модульных приборов характерное время таких задержек – сотни пикосекунд. • Так как фазовый сдвиг – постоянная величина, ее можно исключить, введя задержку между синхроимпульсом и началом выполнения задачи для каждого прибора. Однако устранить другие паразитные эффекты, такие как снос и дрожание, таким путем нельзя. Поэтому устройства, абсолютно точно синхронизированные в начале работы, могут потерять синхронизацию через какое-то время.
• Общий синхроимпульс – форма аппаратной синхронизации. При ней несколько устройств могут стартовать или выполнять другие задачи, по общему синхроимпульсу. Одно из устройств при этом считается главным и контролирует синхроимпульс. Оно генерирует этот сигнал одновременно с началом выполнения какой-либо задачи. Ведомые устройства начинают выполнять свои задачи сразу же по получении синхроимпульса. Из-за того что сигналу нужно пройти до устройств через провода разной длины, такая синхронизация не исключает возникновения задержек, однако они существенно меньше программных. Для модульных приборов характерное время таких задержек – сотни пикосекунд. • Так как фазовый сдвиг – постоянная величина, ее можно исключить, введя задержку между синхроимпульсом и началом выполнения задачи для каждого прибора. Однако устранить другие паразитные эффекты, такие как снос и дрожание, таким путем нельзя. Поэтому устройства, абсолютно точно синхронизированные в начале работы, могут потерять синхронизацию через какое-то время.
 • • • Общее тактирование – другой метод аппаратной синхронизации. При нем устройство может передавать свои тактирующие импульсы другим устройствам по кабелю. Это исключает эффекты сноса, так как тактирующая частота оказывается одинаковой для всех устройств. При таком способе синхронизации возрастает дрожание тактирующей частоты и связанный с этим фазовый шум, так как соединительные провода вносят помехи в передаваемые тактирующие импульсы. Вы можете использовать общее тактирование с общим синхрозапуском одновременно. Фазовый сдвиг вызывает проблемы, когда общее тактирование используется при высоких частотах тактирования. Если задержка, вызванная фазовым сдвигом, больше длины цикла тактирования, устройства будут иметь нежелательный сдвиг между своими измерениями. Каждое устройство может работать на частотах тактирования, не превышающих некоторого предела, являющегося характеристикой данного устройства. Поэтому группа синхронизованных устройств вынуждена использовать общий осциллятор с наименьшей частотой, допускаемой характеристиками худшего в этом отношении прибора. Это ограничение является еще одним недостатком синхронизации через общее тактирование.
• • • Общее тактирование – другой метод аппаратной синхронизации. При нем устройство может передавать свои тактирующие импульсы другим устройствам по кабелю. Это исключает эффекты сноса, так как тактирующая частота оказывается одинаковой для всех устройств. При таком способе синхронизации возрастает дрожание тактирующей частоты и связанный с этим фазовый шум, так как соединительные провода вносят помехи в передаваемые тактирующие импульсы. Вы можете использовать общее тактирование с общим синхрозапуском одновременно. Фазовый сдвиг вызывает проблемы, когда общее тактирование используется при высоких частотах тактирования. Если задержка, вызванная фазовым сдвигом, больше длины цикла тактирования, устройства будут иметь нежелательный сдвиг между своими измерениями. Каждое устройство может работать на частотах тактирования, не превышающих некоторого предела, являющегося характеристикой данного устройства. Поэтому группа синхронизованных устройств вынуждена использовать общий осциллятор с наименьшей частотой, допускаемой характеристиками худшего в этом отношении прибора. Это ограничение является еще одним недостатком синхронизации через общее тактирование.
 • Другой способ уравнять частоту тактирования для всех синхронизованных устройств – использование контуров согласования фаз. При нем каждое устройство получает некоторую общую тактирующую частоту и привязывает свой осциллятор к ней. Для этого служит дополнительный осциллятор, частота работы которого может регулироваться поданным на него напряжением. Основная идея данного способа – позволить каждому устройству пользоваться своим осциллятором, но при этом обеспечить их согласование с эталонной частотой. В результате эффекты сноса, фазового сдвига и фазового шума могут быть минимизированы.
• Другой способ уравнять частоту тактирования для всех синхронизованных устройств – использование контуров согласования фаз. При нем каждое устройство получает некоторую общую тактирующую частоту и привязывает свой осциллятор к ней. Для этого служит дополнительный осциллятор, частота работы которого может регулироваться поданным на него напряжением. Основная идея данного способа – позволить каждому устройству пользоваться своим осциллятором, но при этом обеспечить их согласование с эталонной частотой. В результате эффекты сноса, фазового сдвига и фазового шума могут быть минимизированы.
 СИНХРОНИЗАЦИЯ МОДУЛЬНЫХ ПРИБОРОВ СТАНДАРТА PXI • Есть несколько способов синхронизации модульных приборов стандарта PXI. Наличие общей шины данных и синхронизации значительно облегчает этот процесс. • Шина синхроимпульсов PXI (PXI Trigger Bus) встроена в шасси, поэтому позволяет посылать синхроимпульсы с минимумом задержек. • Еще одна шина синхроимпульсов – Star Trigger Bus, она соединяет все устройства PXI-шасси, начиная со слота № 2. Ее особенность в том, что длина соединительных проводов между слотом № 2 и всеми остальными слотами PXI-шасси одинакова, что позволяет минимизировать задержку синхронизации до значений менее 1 нс. Также по этой шине устройство в слоте № 2 может распределять свои тактирующие импульсы. • PXI-шасси также содержит эталонный источник тактирования (PXI Reference Clock), работающий на частоте 10 МГц с точностью 25 ppm. Вы также можете использовать этот источник для согласования фаз других источников тактирующих импульсов. Длина соединяющих проводов между источником и всеми PXI-слотами одинакова.
СИНХРОНИЗАЦИЯ МОДУЛЬНЫХ ПРИБОРОВ СТАНДАРТА PXI • Есть несколько способов синхронизации модульных приборов стандарта PXI. Наличие общей шины данных и синхронизации значительно облегчает этот процесс. • Шина синхроимпульсов PXI (PXI Trigger Bus) встроена в шасси, поэтому позволяет посылать синхроимпульсы с минимумом задержек. • Еще одна шина синхроимпульсов – Star Trigger Bus, она соединяет все устройства PXI-шасси, начиная со слота № 2. Ее особенность в том, что длина соединительных проводов между слотом № 2 и всеми остальными слотами PXI-шасси одинакова, что позволяет минимизировать задержку синхронизации до значений менее 1 нс. Также по этой шине устройство в слоте № 2 может распределять свои тактирующие импульсы. • PXI-шасси также содержит эталонный источник тактирования (PXI Reference Clock), работающий на частоте 10 МГц с точностью 25 ppm. Вы также можете использовать этот источник для согласования фаз других источников тактирующих импульсов. Длина соединяющих проводов между источником и всеми PXI-слотами одинакова.
 может быть вставлен") • Дополнительный модуль тактирования и синхронизации (Timing and Synchronisation Module) может быть вставлен в слот № 2 PXI-шасси. Он предоставляет набор дополнительных возможностей для точной синхронизации. Также он содержит более точный источник тактирования, имеющий точность 50 ppb (миллиардных долей), и позволяет использовать внешний тактирующий источник. Он также содержит встроенный FPGA-модуль, программируемый с помощью Lab. VIEW и добавляющий дополнительную функциональность. Кроме всего вышеперечисленного, дополнительный модуль позволяет синхронизовать несколько PXI-шасси, увеличивая количество каналов сбора и генерации сигналов в действительно больших тестовых системах. •
• Дополнительный модуль тактирования и синхронизации (Timing and Synchronisation Module) может быть вставлен в слот № 2 PXI-шасси. Он предоставляет набор дополнительных возможностей для точной синхронизации. Также он содержит более точный источник тактирования, имеющий точность 50 ppb (миллиардных долей), и позволяет использовать внешний тактирующий источник. Он также содержит встроенный FPGA-модуль, программируемый с помощью Lab. VIEW и добавляющий дополнительную функциональность. Кроме всего вышеперечисленного, дополнительный модуль позволяет синхронизовать несколько PXI-шасси, увеличивая количество каналов сбора и генерации сигналов в действительно больших тестовых системах. •
 Тактирование синхроимпульсами • Общий синхрозапуск – хороший способ запустить несколько устройств приблизительно одновременно. Однако при высоких частотах тактирования фазовый сдвиг, возникающий при распространении синхроимпульса, становится серьезной проблемой. Для примера возьмем два устройства, работающих на частоте тактирования 100 МГц, соединенных кабелем для общего синхрозапуска длиной в 40 см. Возникающая при этом задержка равна примерно 1, 5 нс, что ведет к фазовому сдвигу в 15% от периода тактирования. Модульные инструменты, имеющие архитектуру ядра синхронизации и памяти (Synchronization and Memory Core) могут использовать тактирование синхроимпульсами (Trigger Clock, в дальнейшем ТС) для решения этой проблемы • С использованием этой технологии задержки между синхроимпульсами для разных устройств практически не возникает; также исключается остаточное несовпадение фаз при использовании контуров согласования фаз. ТС, по сути, является расширением как раз последнего метода. Для своей работы этот метод требует эталонного источника тактирующих импульсов (с которым согласовываются осцилляторы других устройств) и трех линий для синхроимпульсов (одна для синхронизации, другая для синхроипульсовначала и остановки).
Тактирование синхроимпульсами • Общий синхрозапуск – хороший способ запустить несколько устройств приблизительно одновременно. Однако при высоких частотах тактирования фазовый сдвиг, возникающий при распространении синхроимпульса, становится серьезной проблемой. Для примера возьмем два устройства, работающих на частоте тактирования 100 МГц, соединенных кабелем для общего синхрозапуска длиной в 40 см. Возникающая при этом задержка равна примерно 1, 5 нс, что ведет к фазовому сдвигу в 15% от периода тактирования. Модульные инструменты, имеющие архитектуру ядра синхронизации и памяти (Synchronization and Memory Core) могут использовать тактирование синхроимпульсами (Trigger Clock, в дальнейшем ТС) для решения этой проблемы • С использованием этой технологии задержки между синхроимпульсами для разных устройств практически не возникает; также исключается остаточное несовпадение фаз при использовании контуров согласования фаз. ТС, по сути, является расширением как раз последнего метода. Для своей работы этот метод требует эталонного источника тактирующих импульсов (с которым согласовываются осцилляторы других устройств) и трех линий для синхроимпульсов (одна для синхронизации, другая для синхроипульсовначала и остановки).
 • С использованием этой технологии задержки между синхроимпульсами для разных устройств практически не возникает; также исключается остаточное несовпадение фаз при использовании контуров согласования фаз. ТС, по сути, является расширением как раз последнего метода. Для своей работы этот метод требует эталонного источника тактирующих импульсов (с которым согласовываются осцилляторы других устройств) и трех линий для синхроимпульсов (одна для синхронизации, другая для синхроипульсовначала и остановки). В этом режиме каждое устройство генерирует тактирующие синхроимпульсы на относительно низкой ТС-частоте, связанной с частотой осциллятора. Данная частота может устанавливаться программно, обычно она равна 5 МГц. Все устройства синхронизируются, получая тактирующие импульсы от своего осциллятора на ТС-частоте. Далее одно из устройств получает программную команду сгенерировать синхроимпульс по линии синхронизации. Остальные устройства вычисляют время получения этого сигнала по эталонному источнику тактирующих импульсов и сообщают его управляющей программе. Программа корректирует работы осцилляторов на всех устройствах, чтобы точно синхронизовать их фазы. Эта процедура может быть проведена единожды, после чего снос частоты будет практически отсутствовать.
• С использованием этой технологии задержки между синхроимпульсами для разных устройств практически не возникает; также исключается остаточное несовпадение фаз при использовании контуров согласования фаз. ТС, по сути, является расширением как раз последнего метода. Для своей работы этот метод требует эталонного источника тактирующих импульсов (с которым согласовываются осцилляторы других устройств) и трех линий для синхроимпульсов (одна для синхронизации, другая для синхроипульсовначала и остановки). В этом режиме каждое устройство генерирует тактирующие синхроимпульсы на относительно низкой ТС-частоте, связанной с частотой осциллятора. Данная частота может устанавливаться программно, обычно она равна 5 МГц. Все устройства синхронизируются, получая тактирующие импульсы от своего осциллятора на ТС-частоте. Далее одно из устройств получает программную команду сгенерировать синхроимпульс по линии синхронизации. Остальные устройства вычисляют время получения этого сигнала по эталонному источнику тактирующих импульсов и сообщают его управляющей программе. Программа корректирует работы осцилляторов на всех устройствах, чтобы точно синхронизовать их фазы. Эта процедура может быть проведена единожды, после чего снос частоты будет практически отсутствовать.

 РЕЖИМЫ ЦИФРОВОГО ВВОДА-ВЫВОДА • Допустим, необходимо передать цифровой сигнал « 001» . Так как при использовании большинства стандартов передачи данных сигнал в линии при этом меняется лишь один раз (при посылке « 1» ), необходимо дополнительно извещать принимающее устройство о начале передачи данных, а также о частоте передачи. Для стандартизации этой дополнительной информации используются различные режимы цифрового ввода-вывода. • Статический ввод-вывод (Immediate I/O or Static I/O) подразумевает программный контроль за началом и окончанием генерации данных. В данном режиме задержки могут быть очень велики (вплоть до секунды), поэтому использоваться он может только для некритичных ко времени задач, таких как, например, контроль и управление состояниями индикаторных светодиодов и переключателей. • В режиме «С подтверждением» (Handshaking) устройства обмениваются между собой специальными сигналами, сообщая о различных событиях – начале генерации данных, получении данных или других. В данном режиме устройства могут работать асинхронно или синхронно. В первом случае передача данных сопровождается только служебными сигналами начала и окончания. Во втором случае к ним добавляются синхронизирующие тактирующие импульсы.
РЕЖИМЫ ЦИФРОВОГО ВВОДА-ВЫВОДА • Допустим, необходимо передать цифровой сигнал « 001» . Так как при использовании большинства стандартов передачи данных сигнал в линии при этом меняется лишь один раз (при посылке « 1» ), необходимо дополнительно извещать принимающее устройство о начале передачи данных, а также о частоте передачи. Для стандартизации этой дополнительной информации используются различные режимы цифрового ввода-вывода. • Статический ввод-вывод (Immediate I/O or Static I/O) подразумевает программный контроль за началом и окончанием генерации данных. В данном режиме задержки могут быть очень велики (вплоть до секунды), поэтому использоваться он может только для некритичных ко времени задач, таких как, например, контроль и управление состояниями индикаторных светодиодов и переключателей. • В режиме «С подтверждением» (Handshaking) устройства обмениваются между собой специальными сигналами, сообщая о различных событиях – начале генерации данных, получении данных или других. В данном режиме устройства могут работать асинхронно или синхронно. В первом случае передача данных сопровождается только служебными сигналами начала и окончания. Во втором случае к ним добавляются синхронизирующие тактирующие импульсы.
 аналоговым фильтром,") • После применения цифрового фильтра сигнал готов для обработки низкочастотным (lowpass) аналоговым фильтром, который подавляет высокие частоты (обычно выше 154 МГц) и пропускает низкие.
• После применения цифрового фильтра сигнал готов для обработки низкочастотным (lowpass) аналоговым фильтром, который подавляет высокие частоты (обычно выше 154 МГц) и пропускает низкие.