aea291aab760400250da69b056803f58.ppt
- Количество слайдов: 34



Principles of Radar Target Tracking Jay Bhalodi, Jeff Cao, Lily Healey, Wendy Lin, Tuling Ma, Zara Mannan, Brandon Millman, Zachary Purdy, Divya Sharma, Mimi Xu

The Corporations Government Agent Randy Heuer Consultant Zachary Vogel Cheetah. Track Jay Bhalodi, Lily Healey, Wendy Lin, Tuling Ma, Mimi Xu TRAC Jeffrey Cao, Zara Mannan, Brandon Millman, Zachary Purdy, Divya Sharma,

Problem and Solution Problem: Noise Inaccuracies in measurement data Solution: Kalman Filter Account for noise to better predict Updates to better approximate noise

Kalman Filter: Background Derived by R. E. Kalman Published A New Approach to Linear Filtering and Prediction Problems in the Journal of Basic Engineering in 1960 Kalman Filter used extensively in fields of navigation and tracking

Kalman Filter Model = The foundation of the Kalman filter lies in its model of both the target’s movement and the actual measurement of the position.

Kalman Theory The Kalman Filter is a two-step algorithm : First the algorithm “predicts” the target’s next expected location PREDICT UPDATE Then update predictions based on new measurements

Predict Step Predicts using transition matrix and current velocity value Advances state covariance matrix for update step

Update Step Updates position matrix based on weighting factor and residual Calculates Kalman Gain Matrix Recalculates state covariance matrix for predict step

Implementation Java - Efficient due to object-oriented nature Different class for filter and each matrix Modular - easy to modify
 Vector")
Implementation Java Libraries JAMA Matrix Library National Institute of Standards and Technology (NIST) Vector Class
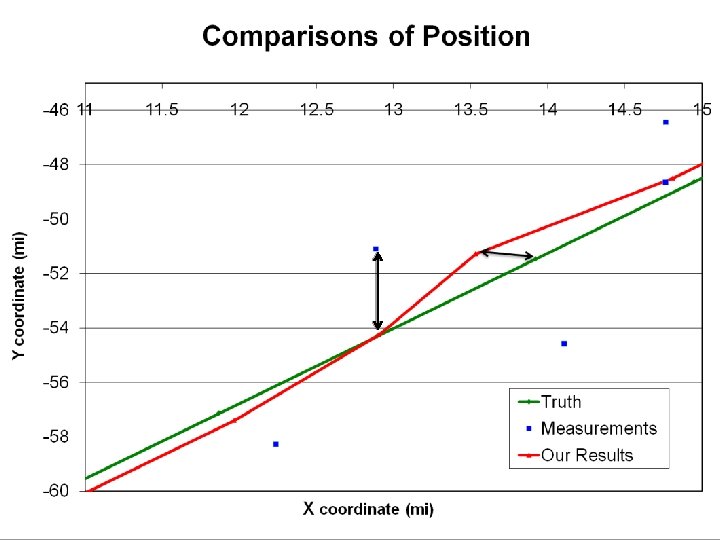

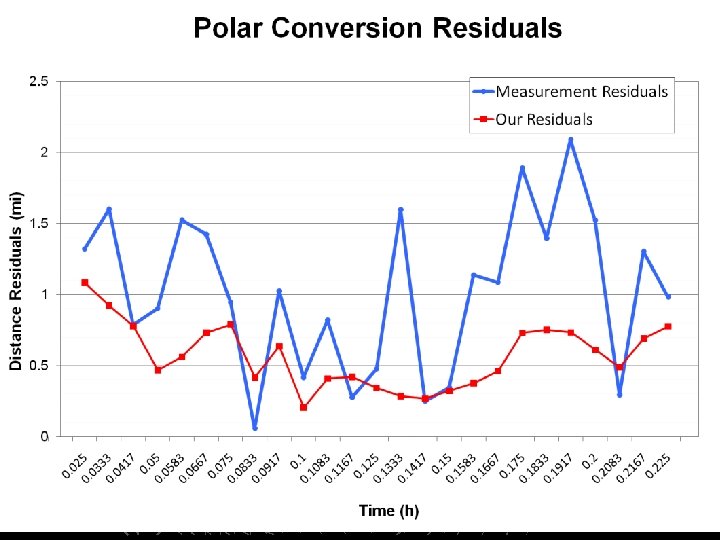
Residuals- difference between our results and real data

Adaptations Adapted filter to different challenging environments: Polar Conversions Two Radars Collision Avoidance Maneuvering Targets Intercepting Targets

Polar Conversions Real life applications-Range and Bearing Transformed coordinate system r α θ

Updating the R Matrix Error of range and bearing not along the xy plane

Multiple Radars Two changes: multiple data-input sources variable time Implementation: Added update method to recalculate state transition (Φ) matrix Tagged data to later reconcile to single reference frame
")
Residual in Comparison to Truth 8 Our Residuals 7 Measurement Residuals Distance Residual (mi) 6 5 4 3 2 1 0 0 0. 02 0. 04 0. 06 0. 08 0. 1 Time (hr) 0. 12 0. 14 0. 16 0. 18

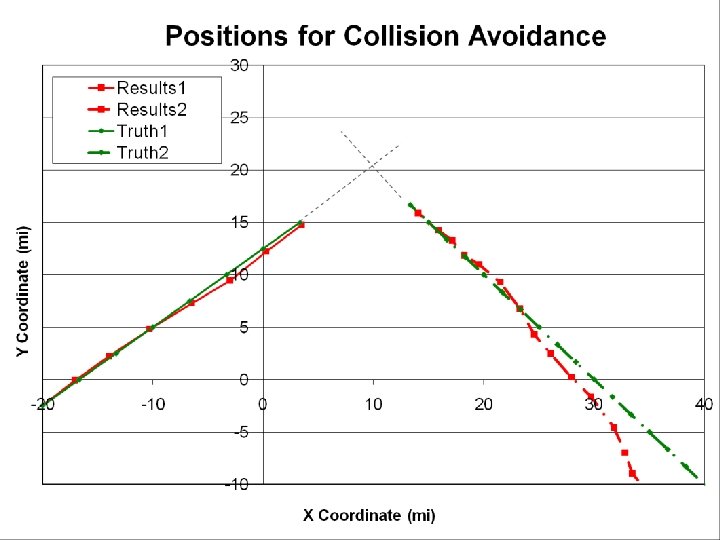
Collision Avoidance Some Changes: Track two targets Within 12 mi, predict paths Within 1 mi, prompt for evasive action
 Sequence of Steps: Run filter for each target Check distance")
Collision Avoidance (cont. ) Sequence of Steps: Run filter for each target Check distance each iteration If less than 12 miles: Predict if they will come within 1 mi of each other Solve for time (40)

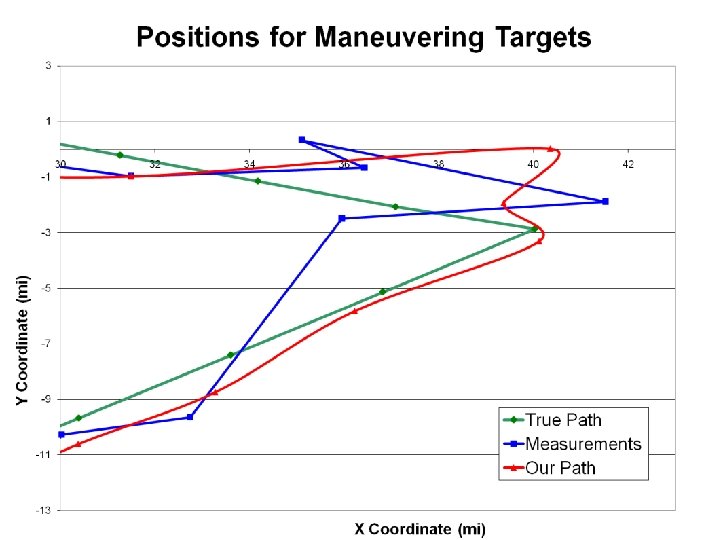
Maneuvering Targets The Change: Target no longer follows one linear path and may maneuver The Steps: • Detect • Count • Reset
 20 10 0 -20")
Positions for Maneuvering Targets 50 40 30 Y Coordinate (mi) 20 10 0 -20 -10 0 10 20 30 40 -10 -20 -30 True Path -40 Our Path -50 X Coordinate (mi) 50

Residuals

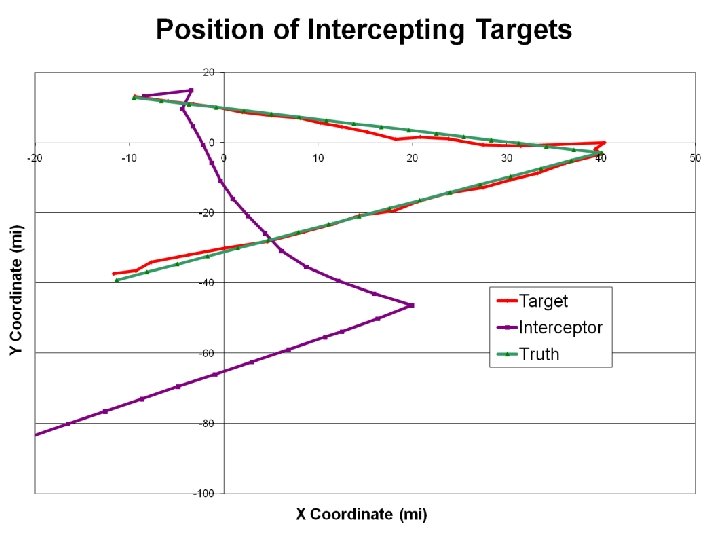
Intercepting Targets N • Use Law of Sines to find α Point of Interception B • A α β τ Interceptor D Target γ E and β can be found using

Intercepting Targets N Point of Interception B A α β τ Interceptor D Target γ

Further Applications Real Time Radar Tracking Variable Altitudes Acceleration

Conclusion • Exposure to and successful implementation of Kalman Filter • Many adaptations for our tracking system • Overall, successful and effective

THANK YOU! Randy Heuer and Zachary Vogel u Dr. Miyamoto u Paul and Counselors u Course and Lab Teachers u

Thank you John and Laura Overdeck Jewish Communal Fund NJGSS Alumnae and Parents, 1984 - 2008 Schering-Plough Foundation Novartis The Dorr Foundation The Edward W. and Stella C. Van Houten Memorial Fund The Jennifer A. Chalsty Foundation

Any Questions?
![References [1] Blackman SS. 1986. Multiple-Target Tracking with Radar Applications. Artech House, Inc. [2]](https://present5.com/presentation/aea291aab760400250da69b056803f58/image-34.jpg "References [1] Blackman SS. 1986. Multiple-Target Tracking with Radar Applications. Artech House, Inc. [2]")
References [1] Blackman SS. 1986. Multiple-Target Tracking with Radar Applications. Artech House, Inc. [2] Atwood B. 2003. Covariance and GLAST. <http: //wwwglast. slac. stanford. edu/software/Ana. Group/WBA 072003 Covariance. pdf>. Accessed 2008 July 21. [3] [IEEE] Institute of Electrical and Electronics Engineers. 2003 Jan 23. Rudolf E. Kalman, 1930 -. IEEE History Center. <http: //www. ieee. org/web/aboutus/history_center/biography/kal man. html>. Accessed 2008 July 21. [4] Kalman, R. E. 1960. A New Approach to Linear Filtering and Prediction Problems. ASME Journal of Basic Engineering 1960 March.
aea291aab760400250da69b056803f58.ppt