

принцип возможных перемещений.ppt
- Количество слайдов: 33
 Принцип возможных перемещений
Принцип возможных перемещений
 1. Классификация связей. • • • Голономные Неголономные Удерживающие Неудерживающие Стационарные Нестационарные
1. Классификация связей. • • • Голономные Неголономные Удерживающие Неудерживающие Стационарные Нестационарные

 • Нестационарная, неудерживающая, голономная связь: нить, длина которой изменяется по некоторому закону.
• Нестационарная, неудерживающая, голономная связь: нить, длина которой изменяется по некоторому закону.
 2. Перемещения. • Действительные • Возможные
2. Перемещения. • Действительные • Возможные
 • В. п. –б. м. перемещения точек системы, допускаемые в данный момент всеми наложенными на систему связями. 1. Б. м. 2. Связи сохраняются.
• В. п. –б. м. перемещения точек системы, допускаемые в данный момент всеми наложенными на систему связями. 1. Б. м. 2. Связи сохраняются.
 ШАРИК НА ПЛОСКОСТИ
ШАРИК НА ПЛОСКОСТИ
 Числом степеней свободы • Называется число независимых между собой возможных перемещений системы
Числом степеней свободы • Называется число независимых между собой возможных перемещений системы
 Взаимосвязь между действительными и возможными перемещениями
Взаимосвязь между действительными и возможными перемещениями
 вывод • Для стационарных связей действительные перемещения лежат среди возможных
вывод • Для стационарных связей действительные перемещения лежат среди возможных
 Реономные связи
Реономные связи
 Для реономных связей • Действительные перемещения не лежат среди возможных. Таким образом для нестационарных связей под возможными перемещениями понимаются перемещения при замороженных связях
Для реономных связей • Действительные перемещения не лежат среди возможных. Таким образом для нестационарных связей под возможными перемещениями понимаются перемещения при замороженных связях
 Виртуальная работа
Виртуальная работа
 Принцип возможных перемещений • Рассмотрим систему находящуюся в равновесии под действием активных и реактивных сил. Наложенные связи полагаем идеальными.
Принцип возможных перемещений • Рассмотрим систему находящуюся в равновесии под действием активных и реактивных сил. Наложенные связи полагаем идеальными.
 Формулировка теоремы • Для равновесия системы с идеальными голономными стационарными связями необходимо и достаточно, чтобы сумма виртуальных работ всех действующих на нее активных сил на любом возможном перемещении системы равнялась нулю.
Формулировка теоремы • Для равновесия системы с идеальными голономными стационарными связями необходимо и достаточно, чтобы сумма виртуальных работ всех действующих на нее активных сил на любом возможном перемещении системы равнялась нулю.
 необходимость
необходимость
 достаточность
достаточность
 Связи идеальные
Связи идеальные
") (1)
(1)
 для каждого") • Для системы с «n» степенями свободы необходимо составить уравнение (1) для каждого независимого перемещения в отдельности.
• Для системы с «n» степенями свободы необходимо составить уравнение (1) для каждого независимого перемещения в отдельности.
 задача • Найти зависимость между моментом М пары, действующей на кривошипно-шатунного механизма, и силой давления Р на поршень при равновесии, если ОА=r, АВ=l и угол АОВ равен φ.
задача • Найти зависимость между моментом М пары, действующей на кривошипно-шатунного механизма, и силой давления Р на поршень при равновесии, если ОА=r, АВ=l и угол АОВ равен φ.
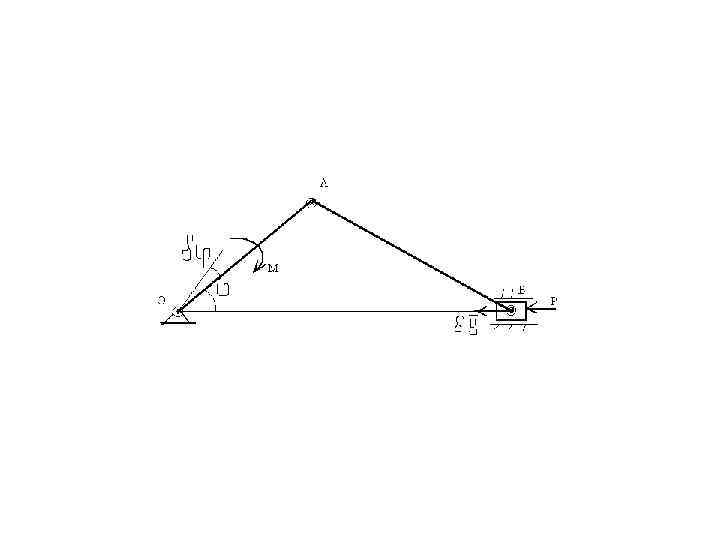
 Решение
Решение
 ответ
ответ
 Принцип Д’Аламбера. Ф= -ma N Fa ma
Принцип Д’Аламбера. Ф= -ma N Fa ma
 • При движении материальной точки в любой момент времени") Принцип Д’Аламбера (для материальной точки) • При движении материальной точки в любой момент времени приложенные к ней активные силы, силы реакции связей и сила инерции образуют систему сил, эквивалентную нулю (уравновешенную систему сил).
Принцип Д’Аламбера (для материальной точки) • При движении материальной точки в любой момент времени приложенные к ней активные силы, силы реакции связей и сила инерции образуют систему сил, эквивалентную нулю (уравновешенную систему сил).
 a+ F • Доказательство: N + Ф=0
a+ F • Доказательство: N + Ф=0
 • При движении механической системы в любой момент времени") Принцип Д’Аламбера (для механической системы) • При движении механической системы в любой момент времени приложенные в каждой точке системы активные, реактивные силы инерции образуют уравновешенную систему.
Принцип Д’Аламбера (для механической системы) • При движении механической системы в любой момент времени приложенные в каждой точке системы активные, реактивные силы инерции образуют уравновешенную систему.
 Общее уравнение динамики • При движении системы с идеальными связями работа всех активных сил инерции на любом виртуальном перемещении системы равно нулю.
Общее уравнение динамики • При движении системы с идеальными связями работа всех активных сил инерции на любом виртуальном перемещении системы равно нулю.
 доказательство
доказательство
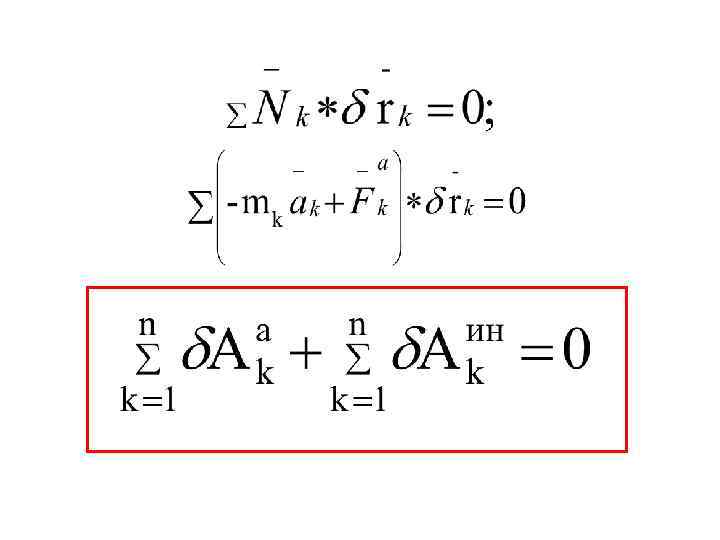
 Таблица замены связей Связь Определяемая реакция Жесткая заделка Реактивный момент Жесткая заделка Вертикальная реакция Жесткая заделка Горизонтальная реакция Замена
Таблица замены связей Связь Определяемая реакция Жесткая заделка Реактивный момент Жесткая заделка Вертикальная реакция Жесткая заделка Горизонтальная реакция Замена
 литература • Тарг С. М. Краткий курс ТМ §§ 137 -141; • Яблонский А. А. Курс ТМ §§ 96 -105.
литература • Тарг С. М. Краткий курс ТМ §§ 137 -141; • Яблонский А. А. Курс ТМ §§ 96 -105.