

Прикладная_механика_1.ppt
- Количество слайдов: 67
 ПРИКЛАДНАЯ МЕХАНИКА Лектор: Резников Станислав Сергеевич
ПРИКЛАДНАЯ МЕХАНИКА Лектор: Резников Станислав Сергеевич
 Задачи дисциплины: l l изучить методы расчета и обоснованного выбора параметров приборных устройств различного назначения; сформировать навыки анализа конкретных проектных ситуаций и выполнения учебных конструкторских работ.
Задачи дисциплины: l l изучить методы расчета и обоснованного выбора параметров приборных устройств различного назначения; сформировать навыки анализа конкретных проектных ситуаций и выполнения учебных конструкторских работ.
 В результате изучения дисциплины студент должен: ИМЕТЬ ПРЕДСТАВЛЕНИЕ о видах и этапах проектных работ в приборостроении, основных видах механизмов приборов, методах исследования их кинематических и точностных характеристик, методах расчета на прочность и жесткость деталей приборов;
В результате изучения дисциплины студент должен: ИМЕТЬ ПРЕДСТАВЛЕНИЕ о видах и этапах проектных работ в приборостроении, основных видах механизмов приборов, методах исследования их кинематических и точностных характеристик, методах расчета на прочность и жесткость деталей приборов;
 В результате изучения дисциплины студент должен: ИМЕТЬ ОПЫТ: учебного проектирования и конструирования приборов различной физической природы и назначения;
В результате изучения дисциплины студент должен: ИМЕТЬ ОПЫТ: учебного проектирования и конструирования приборов различной физической природы и назначения;
 В результате изучения дисциплины студент должен: ЗНАТЬ устройство, назначение, свойства, методы расчета, проектирования и конструирования точных механизмов приборов; методы расчета деталей приборов по критериям работоспособности и надежности;
В результате изучения дисциплины студент должен: ЗНАТЬ устройство, назначение, свойства, методы расчета, проектирования и конструирования точных механизмов приборов; методы расчета деталей приборов по критериям работоспособности и надежности;
 В результате изучения дисциплины студент должен: УМЕТЬ выбирать размеры и форму деталей, рационально соединяя их между собой для выполнения механизмами предъявляемых к ним требований, разрабатывать конструкторскую документацию в соответствии с требованиями ЕСКД, принимать технически обоснованные решения, грамотно использовать профессиональную лексику;
В результате изучения дисциплины студент должен: УМЕТЬ выбирать размеры и форму деталей, рационально соединяя их между собой для выполнения механизмами предъявляемых к ним требований, разрабатывать конструкторскую документацию в соответствии с требованиями ЕСКД, принимать технически обоснованные решения, грамотно использовать профессиональную лексику;
 Детали приборов Основы конструирования") Структура курса ТММ (теория механизмов и машин) Детали приборов Основы конструирования
Структура курса ТММ (теория механизмов и машин) Детали приборов Основы конструирования
 Краткая историческая справка 1 -й период до начала XIX века - период эмпирического машиностроения в течение которого изобретается большое количество простых машин и механизмов: подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины (Леонардо да Винчи, Вейст, Ползунов, Уатт). Одновременно закладываются и основы теории: теорема о изменении кинетической энергии и механической работы, "золотое правило механики", законы трения, понятие о передаточном отношении, основы геометрической теории циклоидального и эвольвентного зацепления ( Карно, Кулон, Амонтон, Кадано Дж. , Ремер, Эйлер).
Краткая историческая справка 1 -й период до начала XIX века - период эмпирического машиностроения в течение которого изобретается большое количество простых машин и механизмов: подъемники, мельницы, камнедробилки, ткацкие и токарные станки, паровые машины (Леонардо да Винчи, Вейст, Ползунов, Уатт). Одновременно закладываются и основы теории: теорема о изменении кинетической энергии и механической работы, "золотое правило механики", законы трения, понятие о передаточном отношении, основы геометрической теории циклоидального и эвольвентного зацепления ( Карно, Кулон, Амонтон, Кадано Дж. , Ремер, Эйлер).
 Краткая историческая справка 2 -й период от начала до середины XIX века - период начала развития ТММ. В это время разрабатываются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Кариолис), расчет маховика (Понселе), классификация механизмов по функции преобразования движения (Монж, Лану) и другие разделы. Пишутся первые научные монографии по механике машин (Виллис, Бориньи), читаются первые курсы лекций по ТММ и издаются первые учебники (Бетанкур, Чижов, Вейсбах).
Краткая историческая справка 2 -й период от начала до середины XIX века - период начала развития ТММ. В это время разрабатываются такие разделы как кинематическая геометрия механизмов (Савари, Шаль, Оливье), кинетостатика (Кариолис), расчет маховика (Понселе), классификация механизмов по функции преобразования движения (Монж, Лану) и другие разделы. Пишутся первые научные монографии по механике машин (Виллис, Бориньи), читаются первые курсы лекций по ТММ и издаются первые учебники (Бетанкур, Чижов, Вейсбах).
 Краткая историческая справка 3 -й период от второй половины XIX века до начала XX века период фундаментального развития ТММ. За этот период разработаны: основы структурной теории (Чебышев, Грюблер, Сомов, Малышев), основы теории регулирования машин (Вышнеградский), основы теории гидродинамической смазки (Грюблер), основы аналитической теории зацепления (Оливье, Гохман), основы графоаналитической динамики (Виттенбауэр, Мерцалов), структурная классификация и структурный анализ (Ассур), метод планов скоростей и ускорений (Мор, Манке), правило проворачиваемости механизма (Грасгоф) и многие другие разделы ТММ.
Краткая историческая справка 3 -й период от второй половины XIX века до начала XX века период фундаментального развития ТММ. За этот период разработаны: основы структурной теории (Чебышев, Грюблер, Сомов, Малышев), основы теории регулирования машин (Вышнеградский), основы теории гидродинамической смазки (Грюблер), основы аналитической теории зацепления (Оливье, Гохман), основы графоаналитической динамики (Виттенбауэр, Мерцалов), структурная классификация и структурный анализ (Ассур), метод планов скоростей и ускорений (Мор, Манке), правило проворачиваемости механизма (Грасгоф) и многие другие разделы ТММ.
 Краткая историческая справка 4 -й период от начала XX века до настоящего времени период интенсивного развития всех направлений ТММ как в России, так и за рубежом. Среди русских ученых необходимо отметить обобщающие работы Артоболевского И. И. , Левитского Н. И. , Фролова К. В. ; в области структуры механизмов - работы Малышева , Решетова Л. Н. , Озола О. Г. ; по кинематике механизмов работы Колчина Н. И. , Смирнова Л. П. , Зиновьева В. А. ; по геометрии зубчатых передач - работы Литвина Ф. Л. , Кетова Х. Ф. , Гавриленко В. А. , Новикова М. Л. ; по динамике машин и механизмов - Горячкин В. П. , Кожевников С. Н. , Коловский М. З. и др. Данное перечисление не охватывает и малой доли работ выдающихся ученых, внесших существенный вклад в развитие ТММ в этот период. Из зарубежных ученых необходимо отметить работы Альта Х. , Бегельзака Г. , Бейера Р. , Крауса Р. , Кросли Ф. и многих других.
Краткая историческая справка 4 -й период от начала XX века до настоящего времени период интенсивного развития всех направлений ТММ как в России, так и за рубежом. Среди русских ученых необходимо отметить обобщающие работы Артоболевского И. И. , Левитского Н. И. , Фролова К. В. ; в области структуры механизмов - работы Малышева , Решетова Л. Н. , Озола О. Г. ; по кинематике механизмов работы Колчина Н. И. , Смирнова Л. П. , Зиновьева В. А. ; по геометрии зубчатых передач - работы Литвина Ф. Л. , Кетова Х. Ф. , Гавриленко В. А. , Новикова М. Л. ; по динамике машин и механизмов - Горячкин В. П. , Кожевников С. Н. , Коловский М. З. и др. Данное перечисление не охватывает и малой доли работ выдающихся ученых, внесших существенный вклад в развитие ТММ в этот период. Из зарубежных ученых необходимо отметить работы Альта Х. , Бегельзака Г. , Бейера Р. , Крауса Р. , Кросли Ф. и многих других.
;") Методы проектирования. l l Прямые аналитические методы синтеза (разработаны для ряда простых типовых механизмов); Эвристические методы проектирования - решение задач проектирования на уровне изобретений (например, алгоритм решения изобретательских задач); Синтез методами анализа - перебор возможных решений по определенной стратегии (на пример, с помощью генератора случайных чисел - метод Монте-Карло) с проведением сравнительного анализа по совокупности качественных и эксплуатационных показателей (часто используются методы оптимизации - минимизация сформулированной разработчиком целевой функции, определяющей совокупность качественных характеристик изделия); Системы автоматизированного проектирования или САПР - компьютерная программная среда моделирует объект проектирования и определяет его качественные показатели, после принятия решения - выбора проектировщиком параметров объекта, система в автоматизированном режиме выдает проектную документацию.
Методы проектирования. l l Прямые аналитические методы синтеза (разработаны для ряда простых типовых механизмов); Эвристические методы проектирования - решение задач проектирования на уровне изобретений (например, алгоритм решения изобретательских задач); Синтез методами анализа - перебор возможных решений по определенной стратегии (на пример, с помощью генератора случайных чисел - метод Монте-Карло) с проведением сравнительного анализа по совокупности качественных и эксплуатационных показателей (часто используются методы оптимизации - минимизация сформулированной разработчиком целевой функции, определяющей совокупность качественных характеристик изделия); Системы автоматизированного проектирования или САПР - компьютерная программная среда моделирует объект проектирования и определяет его качественные показатели, после принятия решения - выбора проектировщиком параметров объекта, система в автоматизированном режиме выдает проектную документацию.
 Основные этапы процесса проектирования. 1. Осознание общественной потребности в разрабатываемом изделии 2. Техническое задание на проектирование (первичное описание) 3. Анализ существующих технических решений 4. Разработка функциональной схемы 5. Разработка структурной схемы 6. Метрический синтез механизма (синтез кинематической схемы) 7. Статический силовой расчет 8. Эскизный проект 9. Кинетостатический силовой расчет 10. Силовой расчет с учетом трения 11. Расчет и конструирование деталей и кинематических пар (прочностные расчеты, уравновешивание, балансировка, виброзащита) 12. Технический проект
Основные этапы процесса проектирования. 1. Осознание общественной потребности в разрабатываемом изделии 2. Техническое задание на проектирование (первичное описание) 3. Анализ существующих технических решений 4. Разработка функциональной схемы 5. Разработка структурной схемы 6. Метрический синтез механизма (синтез кинематической схемы) 7. Статический силовой расчет 8. Эскизный проект 9. Кинетостатический силовой расчет 10. Силовой расчет с учетом трения 11. Расчет и конструирование деталей и кинематических пар (прочностные расчеты, уравновешивание, балансировка, виброзащита) 12. Технический проект
 Основные этапы процесса проектирования. 13. Рабочий проект (разработка рабочих чертежей деталей, технологии изготовления и сборки) 14. Изготовление опытных образцов 15. Испытания опытных образцов 16. Технологическая подготовка серийного производства 17. Серийное производство изделия
Основные этапы процесса проектирования. 13. Рабочий проект (разработка рабочих чертежей деталей, технологии изготовления и сборки) 14. Изготовление опытных образцов 15. Испытания опытных образцов 16. Технологическая подготовка серийного производства 17. Серийное производство изделия
 Машины и их классификация. Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
Машины и их классификация. Машина - техническое устройство, выполняющее преобразование энергии, материалов и информации с целью облегчения физического и умственного труда человека, повышения его качества и производительности.
 l l l - машины - это технические системы, которые главным образом характеризуются потоком энергии и превращением энергии; - приборы - это технические системы, которые главным образом характеризуются потоком и обменом информации; - аппараты - это технические системы, которые, главным образом, характеризуются потоком и превращением веществ.
l l l - машины - это технические системы, которые главным образом характеризуются потоком энергии и превращением энергии; - приборы - это технические системы, которые главным образом характеризуются потоком и обменом информации; - аппараты - это технические системы, которые, главным образом, характеризуются потоком и превращением веществ.

 1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
1. Энергетические машины - преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей:
 2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности: Транспортные машины, которые используют механическую энергию для изменения положения объекта (его координат).
2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности: Транспортные машины, которые используют механическую энергию для изменения положения объекта (его координат).
 2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности: Технологические машины, использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и преобразованию материалов. Эти машины тоже имеют две разновидности: Технологические машины, использующие механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
 3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на: Математические машины, преобразующие входную информацию в математическую модель исследуемого объекта.
3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на: Математические машины, преобразующие входную информацию в математическую модель исследуемого объекта.
 3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на: Контрольно-управляющие машины, преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
3. Информационные машины - машины, предназначенные для обработки и преобразования информации. Они подразделяются на: Контрольно-управляющие машины, преобразующие входную информацию (программу) в сигналы управления рабочей или энергетической машиной.
 4. Кибернетические машины- машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т. е. машины обладающие элементами искусственного интеллекта).
4. Кибернетические машины- машины управляющие рабочими или энергетическими машинами, которые способны изменять программу своих действий в зависимости от состояния окружающей среды (т. е. машины обладающие элементами искусственного интеллекта).
 Классификация механизмов. 1. По области применения и функциональному назначению: механизмы летательных аппаратов; механизмы станков; механизмы кузнечных машин и прессов; механизмы двигателей внутреннего сгорания; механизмы промышленных роботов (манипулятороы); o механизмы компрессоров; o механизмы насосов; o o o
Классификация механизмов. 1. По области применения и функциональному назначению: механизмы летательных аппаратов; механизмы станков; механизмы кузнечных машин и прессов; механизмы двигателей внутреннего сгорания; механизмы промышленных роботов (манипулятороы); o механизмы компрессоров; o механизмы насосов; o o o
 Классификация механизмов. 2. По виду передаточной функции на механизмы: l l с постоянной передаточной функцией; с переменной передаточной функцией: с нерегулируемой (синусные, тангенсные); с регулируемой: l l со ступенчатым регулированием (коробки передач); с бесступенчатым регулированием (вариаторы).
Классификация механизмов. 2. По виду передаточной функции на механизмы: l l с постоянной передаточной функцией; с переменной передаточной функцией: с нерегулируемой (синусные, тангенсные); с регулируемой: l l со ступенчатым регулированием (коробки передач); с бесступенчатым регулированием (вариаторы).
 Классификация механизмов. 3. По виду преобразования движения на механизмы преобразующие : o вращательное во вращательное: редукторы wвх > wвых; мультипликаторы wвх < wвых; муфты wвх = wвых; o вращательное в поступательное; o поступательное во вращательное; o поступательное в поступательное.
Классификация механизмов. 3. По виду преобразования движения на механизмы преобразующие : o вращательное во вращательное: редукторы wвх > wвых; мультипликаторы wвх < wвых; муфты wвх = wвых; o вращательное в поступательное; o поступательное во вращательное; o поступательное в поступательное.
 Классификация механизмов. 4. По движению и расположению звеньев в пространстве: o пространственные; o плоские; o сферические.
Классификация механизмов. 4. По движению и расположению звеньев в пространстве: o пространственные; o плоские; o сферические.
 Классификация механизмов. 5. По изменяемости структуры механизма на механизмы: l l с неизменяемой структурой; с изменяемой структурой.
Классификация механизмов. 5. По изменяемости структуры механизма на механизмы: l l с неизменяемой структурой; с изменяемой структурой.
 Классификация механизмов. 6. По числу подвижностей механизма: l l с одной подвижностью W=1; с несколькими подвижностями W>1: l l суммирующие (интегральные); разделяющие (дифференциальные).
Классификация механизмов. 6. По числу подвижностей механизма: l l с одной подвижностью W=1; с несколькими подвижностями W>1: l l суммирующие (интегральные); разделяющие (дифференциальные).
: l l l с низшими КП") Классификация механизмов. 7. По виду кинематических пар (КП): l l l с низшими КП ( все КП механизма низшие ); с высшими КП ( хотя бы одна КП высшая ); шарнирные (все КП механизма вращательные - шарниры).
Классификация механизмов. 7. По виду кинематических пар (КП): l l l с низшими КП ( все КП механизма низшие ); с высшими КП ( хотя бы одна КП высшая ); шарнирные (все КП механизма вращательные - шарниры).
 Классификация механизмов. 8. по способу передачи и преобразования потока энергии: l l фрикционные ( сцепления ); зацеплением; волновые (создание волновой деформации); импульсные.
Классификация механизмов. 8. по способу передачи и преобразования потока энергии: l l фрикционные ( сцепления ); зацеплением; волновые (создание волновой деформации); импульсные.
 Классификация механизмов. 9. по форме, конструктивному исполнению и движению звеньев: l l l рычажные; зубчатые; кулачковые; планетарные; манипуляторы.
Классификация механизмов. 9. по форме, конструктивному исполнению и движению звеньев: l l l рычажные; зубчатые; кулачковые; планетарные; манипуляторы.
 Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
Кинематическая пара – соединение двух соприкасающихся звеньев, допускающее их относительное движение.
 поверхностей звеньев: o низшие,") Классификация кинематических пар. 1. По виду места контакта (места связи) поверхностей звеньев: o низшие, в которых контакт звеньев осуществляется по плоскости или поверхности ( пары скольжения ); o высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
Классификация кинематических пар. 1. По виду места контакта (места связи) поверхностей звеньев: o низшие, в которых контакт звеньев осуществляется по плоскости или поверхности ( пары скольжения ); o высшие, в которых контакт звеньев осуществляется по линиям или точкам (пары, допускающие скольжение с перекатыванием).
 Классификация кинематических пар. 2. по относительному движению звеньев, образующих пару: o o o вращательные; поступательные; винтовые; плоские; сферические.
Классификация кинематических пар. 2. по относительному движению звеньев, образующих пару: o o o вращательные; поступательные; винтовые; плоские; сферические.
: o силовое (за") Классификация кинематических пар. 3. по способу замыкания (обеспечения контакта звеньев пары): o силовое (за счет действия сил веса или силы упругости пружины); o геометрическое (за счет конструкции рабочих поверхностей пары).
Классификация кинематических пар. 3. по способу замыкания (обеспечения контакта звеньев пары): o силовое (за счет действия сил веса или силы упругости пружины); o геометрическое (за счет конструкции рабочих поверхностей пары).

 Классификация кинематических пар. 4. по числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары );
Классификация кинематических пар. 4. по числу условий связи, накладываемых на относительное движение звеньев (число условий связи определяет класс кинематической пары );








 Элемент кинематической пары – совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном.
Элемент кинематической пары – совокупность поверхностей, линий и отдельных точек звена, по которым оно может соприкасаться с другим звеном.
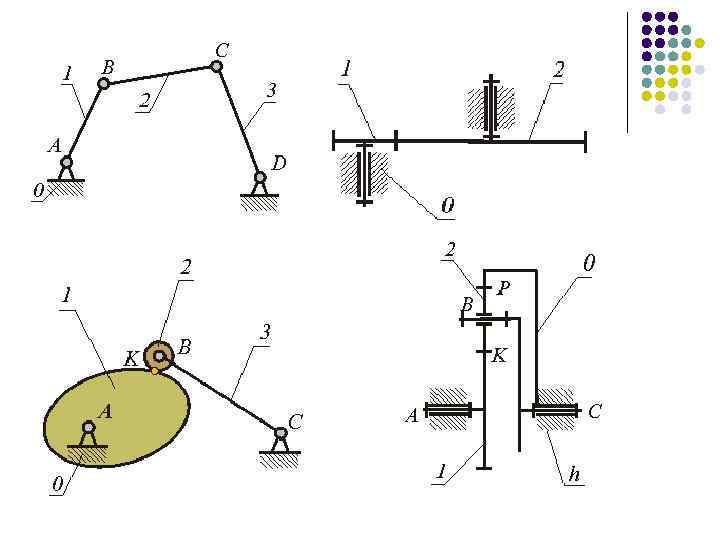
 Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2. 703 -68) или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы
Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2. 703 -68) или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы
 Задачей структурного анализа является задача определения параметров структуры заданного механизма - числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
Задачей структурного анализа является задача определения параметров структуры заданного механизма - числа звеньев и структурных групп, числа и вида КП, числа подвижностей (основных и местных), числа контуров и числа избыточных связей.
 Задачей структурного синтеза является задача синтеза структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т. п.
Задачей структурного синтеза является задача синтеза структуры нового механизма, обладающего заданными свойствами: числом подвижностей, отсутствием местных подвижностей и избыточных связей, минимумом числа звеньев, с парами определенного вида (например, только вращательными, как наиболее технологичными) и т. п.
 Звено – твердое тело, входящее в состав механизма. Звено – одна или совокупность нескольких деталей, не имеющих между собой относительного движения.
Звено – твердое тело, входящее в состав механизма. Звено – одна или совокупность нескольких деталей, не имеющих между собой относительного движения.
 Кривошип – вращающееся звено, которое может совершать полный оборот вокруг неподвижной оси. Коромысло – вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси. Шатун – звено, образующее кинематические пары только с подвижными звеньями.
Кривошип – вращающееся звено, которое может совершать полный оборот вокруг неподвижной оси. Коромысло – вращающееся звено, которое может совершать только неполный оборот вокруг неподвижной оси. Шатун – звено, образующее кинематические пары только с подвижными звеньями.
 Ползун – звено, образующее со стойкой поступательную пару. Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару.
Ползун – звено, образующее со стойкой поступательную пару. Кулиса – звено, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару.
 Камень – звено, имеющее меньшую протяженность элемента поступательной пары. Направляющая – звено, имеющее большую протяженность элемента поступательной пары.
Камень – звено, имеющее меньшую протяженность элемента поступательной пары. Направляющая – звено, имеющее большую протяженность элемента поступательной пары.
 Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
Кинематическая цепь – система звеньев, связанных между собой кинематическими парами.
 Плоская кинематическая цепь – цепь, в которой при закреплении одного из звеньев все другие совершают плоское движение, параллельное одной и той же неподвижной плоскости.
Плоская кинематическая цепь – цепь, в которой при закреплении одного из звеньев все другие совершают плоское движение, параллельное одной и той же неподвижной плоскости.
 Простая кинематическая цепь – цепь, у которой каждое звено входит не более чем в две кинематические пары. Сложная кинематическая цепь – цепь, в которой есть хотя бы одно звено, входящее более чем в две кинематические пары.
Простая кинематическая цепь – цепь, у которой каждое звено входит не более чем в две кинематические пары. Сложная кинематическая цепь – цепь, в которой есть хотя бы одно звено, входящее более чем в две кинематические пары.
 Замкнутая кинематическая цепь – цепь, звенья которой образуют один или несколько контуров. Замкнутая кинематическая цепь – цепь, звенья которой входят по крайней мере в две кинематические пары.
Замкнутая кинематическая цепь – цепь, звенья которой образуют один или несколько контуров. Замкнутая кинематическая цепь – цепь, звенья которой входят по крайней мере в две кинематические пары.
 При обращении одного из звеньев в стойку, кинематическая цепь превращается в механизм.
При обращении одного из звеньев в стойку, кинематическая цепь превращается в механизм.
 Механизм – кинематическая цепь, в которой одно из звеньев обращено в стойку и при заданном движении одного или нескольких звеньев остальные звенья совершают однозначно определяемые движения.
Механизм – кинематическая цепь, в которой одно из звеньев обращено в стойку и при заданном движении одного или нескольких звеньев остальные звенья совершают однозначно определяемые движения.
 Подвижность механизма - число независимых обобщенных координат однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
Подвижность механизма - число независимых обобщенных координат однозначно определяющее положение звеньев механизма на плоскости или в пространстве.
 Связь - ограничение, наложенное на перемещение тела по данной координате.
Связь - ограничение, наложенное на перемещение тела по данной координате.
 - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся") Избыточные (пассивные) - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма.
Избыточные (пассивные) - такие связи в механизме, которые повторяют или дублируют связи, уже имеющиеся по данной координате, и поэтому не изменяющие реальной подвижности механизма.
 Местные подвижности - подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).
Местные подвижности - подвижности механизма, которые не оказывают влияния на его функцию положения (и передаточные функции), а введены в механизм с другими целями (например, подвижность ролика в кулачковом механизме обеспечивает замену в высшей паре трения скольжения трением качения).

