
Подбор экскаватора и транспортных средств Экскаватор можно подобрать


Подбор экскаватора и транспортных средств Экскаватор можно подобрать по объему работ, заданным срокам выполнения работ и требуемым характеристикам машин. При учете объема работ можно руководствоваться следующими данными

Схемы разработки выемок экскаватором «прямая лопата». а – общий вид, б – узкая лобовая проходка, в – нормальная лобовая проходка , г – уширенная лобовая проходка, д – боковая проходка.
 и боковыми проходками, располагаясь выше дна")
Экскаваторы, оборудованные обратной лопатой, разрабатывают выемки торцевыми (лобовыми) и боковыми проходками, располагаясь выше дна забоя, что позволяет использовать их при разработке увлажненных и мокрых грунтов, с погрузкой в транспортное средство или в отвал. Варианты проходки экскаватора с рабочим оборудованием «обратная лопата»: а — торцевал (лобовая); б — уширенная лобовая; в — поперечно-торцевая; г —боковая; д — торцовая с разгрузкой грунта в транспорт и в отвал;
 R0. При боковой")
При работе в отвал ширина проходки бывает меньше — (0,5… 0,8) R0. При боковой проходке автотранспорт под погрузку может подаваться по верху или по дну котлована, с правой или левой стороны. Схемы разработки грунта экскаватором, оборудованным ковшом «обратная лопата» а, б – с жесткой и гибкой подвеской; в – разработка грунта в материковом залегании с установкой транспорта выше и ниже стоянки экскаватора; г – разработка предварительно разрыхленного грунта, д,е – варианты подъезда автомашин.

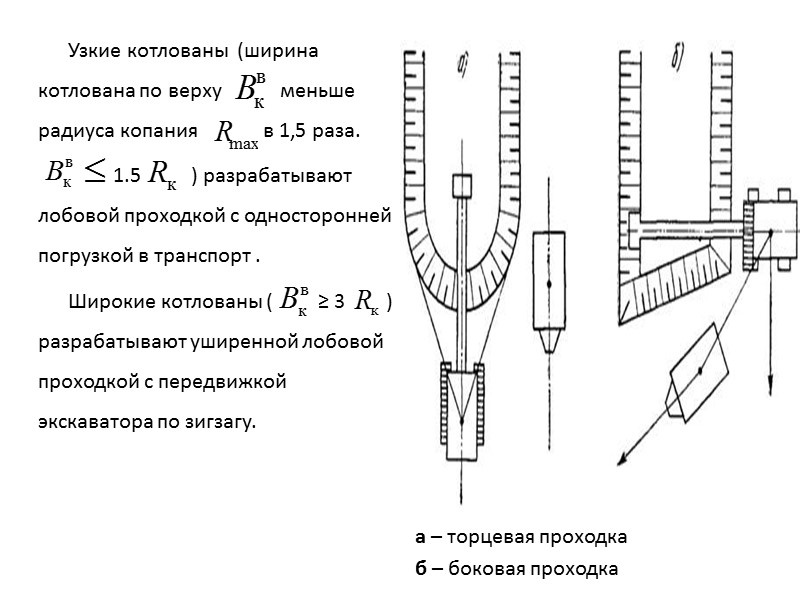
Узкие котлованы (ширина котлована по верху меньше радиуса копания в 1,5 раза. 1.5 ) разрабатывают лобовой проходкой с односторонней погрузкой в транспорт . Широкие котлованы ( ≥ 3 ) разрабатывают уширенной лобовой проходкой с передвижкой экскаватора по зигзагу. а – торцевая проходка б – боковая проходка

Экскаватор с грейферным ковшом свободно подвешенным на тросе, применяют при разработке выемок радиусом 8,00−24,00 м на глубину до 15,00 м. Чаще всего грейфер используют при устройстве опускных колодцев или выемок с вертикальными стенками.

Основные указания по производству работ. До начала производства земельных работ выполняют инструментальную разбивку расположения колодца, отвала, установку ограждения. Угол поворота стрелы экскаватора на выгрузку составляет 45°. Максимальная глубина копания ограничена соприкосновением стрелы экскаватора со стенкой колодца. Схема рытья колодцев экскаватором ЭО-3322Б, оснащенным грейфером, приведена на рисунке:

Рис.3. Планировка дна котлована бульдозером. а - перемещение грунта к месту разработки котлована драглайном; б - перемещение грунта к месту последующей разработки прямой лопатой. Рис.2. Возведение насыпи бульдозера.

I. Основные схемы монтажа: а – монтаж сооружений с габаритами до 15,00 м с передвижением крана и транспортных средств вокруг сооружений по берме котлована; 1 – монтируемое сооружение; 2 – монтажный элемент; 3 – кран; 4 – панелевоз.

II. Основные схемы монтажа: б − монтаж сооружений с габаритами более 15,00 м с передвижением крана и транспортных средств по дну котлована за пределами сооружения; 1 – монтируемое сооружение; 2 – монтажный элемент; 3 – кран; 4 – панелевоз.

III. Основные схемы монтажа: в – монтаж особо крупных сооружений с передвижением крана и транспортных средств по днищу сооружения; 1 – монтируемое сооружение; 2 – монтажный элемент; 3 – кран; 4 – панелевоз.

1. Высота подъема определяется по формуле: = где H − высота проектной опоры, м; a − свободный просвет между опорой и поднятым элементом, для емкостных сооружений - a ≥ 0,5 м; h − высота монтажного элемента, м; ℓ - высота захватных приспособлений, ℓ = 1,5 ~ 2 м; s − длина сжатого полиспаста, s = 1,50 м. Минимальный вылет крюка стрелы зависит от схемы монтажа.

2. Минимальный вылет крюка стрелы для I схемы монтажа, ℓс min , определяется по формуле : ℓс min= ( Bк / 2 ) + 1,2mb + Rm где Rm − радиус поворота платформы крана, м; 1, 2mb − глубина котлована с учетом крутизны откоса, м; Bк − ширина котлована по низу, м. Минимальный вылет крюка стрелы для II и III схемы монтажа, ℓс min , определяется по формуле : ℓс min= Rm + 1,00 + 0,5δ₁ где Rm − радиус поворота платформы крана, м; 1,00 − просвет между краном и сооружением, м; δ₁ − толщина устанавливаемой конструкции, м.

Вылет крюка должен быть достаточным для снятия конструкций с транспортных средств, ℓ¹с : ℓ¹с = Rm + 1,00 + 0,5δ₂ + Bп где 1,00 − просвет между машинами, м; Bп− ширина базы панелевоза, м; δ₂ − расстояние от оси панелевоза до неснятой панели, м. Из вычисленных значений, в качестве ℓс принимают большее. 3. Грузоподъемность крана Q. Подсчитывают исходя из максимального груза, который должен поднять кран при требуемом вылете крюка ℓс . Он определяется массой монтируемых элементов. Q = G + G₁ где G - вес монтируемого элемента, т, G₁ = 10℅ G - вес строп.

Подбор экскаваторов. Разработка грунта одноковшовыми экскаваторами производится проходками, состоящими из последовательных забоев. Экскаваторным забоем называется пространство, ограниченное радиусом действия рабочего оборудования машины, а проходкой – траншея, образуемая при последовательной срезке грунта и периодическом перемещении экскаватора вдоль выемки. Экскаваторный забой включает: - место расположения землеройной машины, часть разрабатываемого с данной стоянки массива грунта, площадку для размещения транспортного средства (при погрузке грунта в транспорт), отвала (при разработке грунта навымет). Профиль забоя зависит: - от основных рабочих параметров экскаватора (рис. 4.1).

Рис. 4.1. Рабочие параметры и профили забоя экскаваторов: а – прямая лопата с канатным управлением; б – обратная лопата с гидравлическим управлением; в – драглайн; Rp – радиус резания; Rв – радиус выгрузки; Н – высота резания; Нк – глубина резания; Нв – высота выгрузки

В зависимости от особенностей разработки грунта и расположения транспортного средства относительно оси перемещения экскаватора различают: лобовую проходку, боковую проходку. Экскаваторы с прямой лопатой при разработке выемки лобовой проходкой (рис. 4.2, а) имеют: невысокую производительность из-за большого угла поворота стрелы на выгрузку грунта, затрудняется подача транспортных средств, которые передвигаются по дну выемки преимущественно задним ходом. Для частичного устранения указанных недостатков при достаточной ширине отрываемого котлована применяются уширенные лобовые проходки (рис. 4.2, б, в). При большой ширине выемки рекомендуется использовать по возможности боковые проходки, которые позволяют значительно уменьшить угол поворота экскаватора и облегчить работу транспортных средств (рис. 4.2, г).

Рис. 4.2. Виды проходок экскаватора, оборудованного прямой лопатой: а – лобовая; б – уширенная лобовая с перемещением экскаватора по зигзагу; в – уширенная лобовая с продольно-поперечным перемещением экскаватора; г – боковая.

Экскаваторы, оборудованные обратной лопатой и ковшом драглайна, разрабатывают грунт ниже уровня стоянки лобовой или боковой проходками (рис. 4.3) на глубину, не превышающую глубину резания машины. Рис. 4.3. Виды проходок экскаватора, оборудованного обратной лопатой: а – лобовая; б – боковая; в – уширенная лобовая с перемещением экскаватора по зигзагу; г – уширенная лобовая с продольно-поперечным перемещением экскаватора.

Подбор экскаваторов. 1. Проектирование экскаваторных работ рекомендуется начинать с проверки условия: c / R ≤ 3,5 где с – ширина котлована поверху, м; R – оптимальный радиус резания экскаватора, равный 0,8–0,9 максимального радиуса резания, м. Если условие соблюдается, то независимо от вида рабочего оборудования принимается устройство котлована за одну проходку. При этом котлованы шириной менее 1,7 R разрабатываются лобовой проходкой с перемещением экскаватора по прямой. Котлованы шириной от 1,7 до 2,5 R – уширенной лобовой проходкой с передвижкой машины по зигзагу. Котлованы шириной от 2,5 до 3,5 R – уширенной лобовой проходкой с продольно-поперечным перемещением экскаватора.
.")
Выбор экскаватора начинается с определения емкости его ковша (Vк , м³). Для этого по таблица 4 в зависимости от объема земляных работ Vз.р в котловане принимается оптимальная емкость ковша экскаватора. Таблица 4. Зависимость емкости ковша экскаватора от объема разрабатываемого грунта.

Для прямой лопаты наибольшая ширина лобовой проходки Вл при движении экскаватора по прямой: где ℓn – длина рабочей передвижки экскаватора, м. Длина рабочей передвижки определяется , как разность наибольшего и наименьшего радиусов резания на уровне стоянки или может приниматься равной 0,75 длины рукояти землеройной машины. Ширина лобовой проходки на уровне стоянки экскаватора с прямой лопатой: В ст.л = 2 Rct где Rct – оптимальный радиус резания на уровне стоянки, м. Максимальная ширина боковой проходки Bб при расположении экскаватора и транспортного средства на одном уровне составляет: а ширина этой же проходки понизу: Bст.б = 1,7 Rcт

Максимальная высота проходок для прямой лопаты не должна превышать наибольшей высоты резания. В противном случае выемка разрабатывается в несколько ярусов. Разработка котлованов и траншей экскаваторами, оборудованными обратной лопатой. Котлованы разрабатываются: торцевыми проходками, боковыми проходками. 1. При определенной ширине котлована проходки применяются следующие: а) торцевая проходка при перемещении экскаватора по прямой; б) то же, с двумя проходками экскаватора; в) то же, при зигзагообразном перемещении экскаватора; г) поперечно-торцевая проходка; д) продольно-торцевая разработка. B = B₁ + B₂ = √ R²max + Lп + (Rт – (bт /2) - 1)

где Rmax – наибольший радиус резания; Lп – длина рабочей передвижки экскаватора; Rт – наибольший радиус выгрузки грунта; bт – ширина транспортного средств (или отвала). Рисунок 1. Схема рабочего места экскаватора. 2. Ширина каждой последующей проходки определяется:

где Rн – максимальный радиус резания на уровне дна выемки; hк – глубина котлована. Таблица 5. Величина шага передвижки. При выборе эффективного экскаватора необходимо учитывать глубину и ширину траншеи. При этом глубина траншеи Н должна быть меньше, чем возможная глубина копания экскаватора Нф, а ширина траншеи Вт, быть меньше или равна ширине ковша экскаватора Вэ. 3. Выбор ширины ковша экскаватора с обратной лопатой определяем по эмпирической формуле через геометрическую вместимость ковша:

Рисунок 2. Схема к определению параметров шарнирно-сочлененного оборудования обратной лопаты. Размеры элементов рабочего оборудования по длине должны соответствовать заданным предельным рабочим параметрам экскаватора – максимальной глубине копания Нк и максимальной высоте выгрузки Нв при опущенной рукояти. 4. Между Нк и Нв существует зависимость: Вэ кр где Вэ – ширина ковша; кр – коэффициент разрыхления грунта.

5. Длина стрелы определяется: где αс – угол поворота стрелы. Увеличение угла αс позволяет сократить длину стрелы и уменьшить массу рабочего оборудования. Рекомендуемые углы поворота стрелы αс = 90...95°. Экскаваторы с обратной лопатой и ковшом драглайна разрабатывают небольшие котлованы (с = 3,5 R) за одну проходку, а широкие выемки (с > 3,5 R) – несколькими параллельными проходками, ширина которых принимается равной (1,2–1,3) R при погрузке грунта в транспорт и (0,5–0,8) R – при его отсыпке в отвал (рис. 4.3). После определения типа проходок и их размеров проектируется технологическая схема экскаваторных работ.

Технологическая схема экскаваторных работ: на плане котлована показывается положение осей движения экскаватора и транспортных средств, производится расстановка машин в забое, отыскивается средний угол поворота экскаватора. Места стоянок транспортных средств выбираются так, чтобы можно было получить наименьший угол поворота. Для нахождения среднего угла поворота на плане забоя отмечается центр тяжести объема грунта, разрабатываемого с одной стоянки, и центр кузова транспортной единицы. Искомым будет угол между линиями, соединяющими найденные центры с осью вращения экскаватора (рис. 4.2, г). Подачу транспорта под погрузку при боковом забое следует осуществлять навстречу перемещению экскаватора. Для отвода воды каждая проходка должна иметь встречный продольный уклон не менее 0,003 в сторону начала разработки. При невозможности обеспечения продольного уклона дну придается поперечный уклон, равный 0,02–0,05, в сторону соседней ранее разработанной проходки.

На чертеже изображается запроектированная технологическая схема: - в виде плана забоя с расстановкой, путями движения и местами стоянок машин, средним углом поворота экскаватора и уклоном дна проходки, - поперечного профиля забоя с расстановкой, путями движения и местами стоянок машин, средним углом поворота экскаватора и уклоном дна проходки. На лист выносится план и поперечный разрез котлована с разбивкой его на проходки. Подбор автосамосвалов. Расчет количества самосвала выполняют в следующей последовательности: 1. Объем грунта в плотном теле в ковше экскаватора определяется:

где Vк – объем ковша экскаватора; кнап– коэффициент наполнения ковша, принимаемый 0,8…0,9 – для "обратной лопаты"; 0,9…1,15 – для "драглайна"; 1,0…1,25 – для "прямой лопаты"; кпр– коэффициент первоначального разрыхления. 2. Масса грунта в ковше экскаватора определяется: где γ – объемная масса грунта ,т/м. 3. Количество ковшей грунта, загружаемых в самосвал определяется: где Па– грузоподъемность самосвала (табл. 1.1, прил. 1). 4. Объем грунта в плотном теле, загружаемого в самосвал определяется:

5. Потребное количество самосвалов, шт, определяется: где Тцикла – продолжительность одного цикла работы самосвала, начиная с погрузки и кончая следующей установкой под погрузку, мин; tпогр – время погрузки грунта в самосвал, мин, tпогр = VаHвр / 100 где Hвр – норма машинного времени по [2] для погрузки экскаватором 100 м грунта в транспорт, мин. 6. Продолжительность одного цикла работы самосвала определяется:

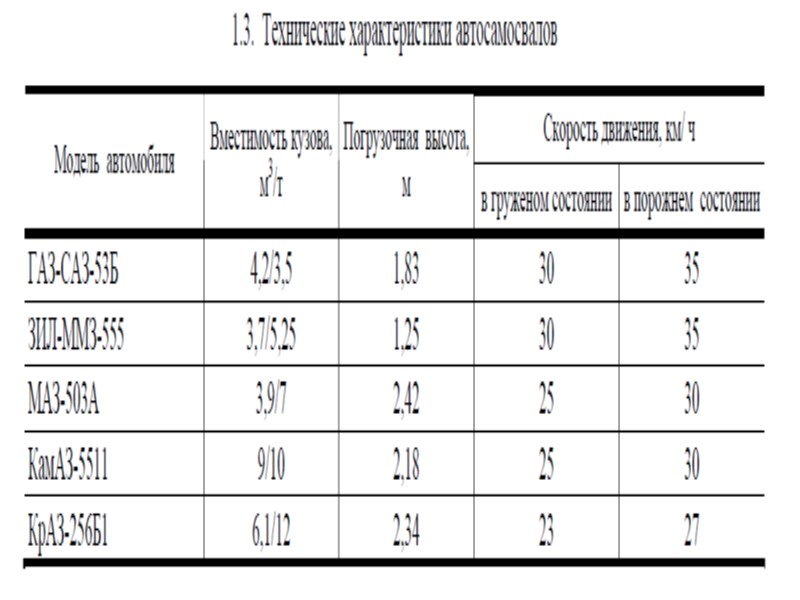
где L – расстояние транспортировки грунта, км; vг, vп – средняя скорость автосамосвала в загруженном и порожнем состоянии, км/ч (по табл. 1.3, прил. 1); tр – время разгрузки (1…2 мин); tм – время маневрирования (2…3 мин). Таблица 6. Эксплуатационные показатели автосамосвалов. Рекомендуемые типы автомобилей в зависимости от емкости ковша выбранного экскаватора приведены в табл. 1.1, 1.3, прил.1.

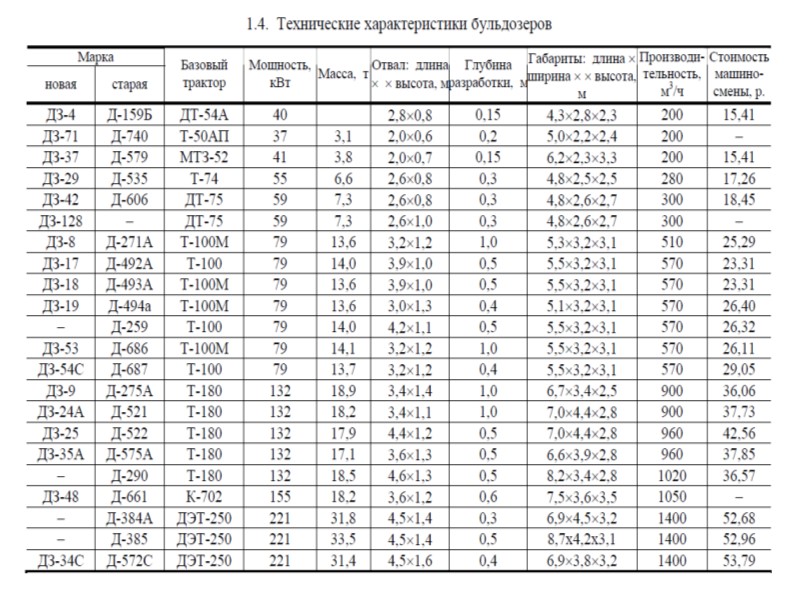
Выбор бульдозера при планировке, срезке и перемещении грунта. Планировочные работы могут выполняться бульдозерами и скреперами. Производительность бульдозера зависит от мощности базовой машины – трактора. Выбор бульдозера производится по данным табл. 7 в зависимости от дальности перемещения грунта. Таблица 7. Выбор бульдозера в зависимости от дальности перемещения грунта. Примечание: дальность перемещения грунта принимать равной: ((Взд/2)+10), м.

Выбор самоходных катков. 1. Выбор катка зависит от типа уплотняемого грунта. Тип катка определяется по требуемой производительности. Для этого предварительно задается тип катка и определяется норму времени по ЕНиР сб.2 «Земляные работы». Рассчитать производительность данного типа катка по формуле: где 100 м3 – единица измерения работ по уплотнению грунта по ЕНиР сб.2 «Земляные работы»; Hвр – норма времени, маш.час по тому же ЕНиР. 2. Подобрать тип уплотняющих машин с производительностью не менее требуемой (см. прил. 9, 10).

Выбор автобетоносмесителя. Бетонная смесь для монолитных сооружений может производиться на стройплощадке в растворно-смесительном узле (РСУ) или доставляться с завода-изготовителя автобетоносмесителями. 1. Выбор автобетоносмесителя зависит от производительности бетонщиков в смену: Псм = ( 8 n 100м³ / Hвр кз) где n – количество рабочих в звене, чел (см. ЕНиР сб.4); Hвр– норма времени, чел.час (по ЕНиР сб.4); Кз – коэффициент, учитывающий условия работы. При зимних условиях работы коэффициент - кз = 1,15, при летних - кз = 1,0. Примечание: n и Hвр принять по ЕНиР сборник 4 «Монтаж сборных и устройство монолитных железобетонных конструкций» параграф §Е4-1-49. 2. Вместимость смесительного барабана по готовому замесу рассчитать по формуле:

где Псм – производительность бетонщиков; t₁, t₂ – время погрузки и маневров, ч (см. прил. 12); t₃ – время разгрузки в бетононасос, ч (см. прил. 12); V₁ – скорость груженного автотранспорта, V₁ = 30 км/ч; V₂ – скорость порожнего автотранспорта, V₂ = 40 км/ч; ℓ – дальность перевозки бетонной смеси, км (по заданию); С – продолжительность рабочей смены, С = 8 ч; кв – коэффициент использования транспорта во времени, кв =0,85. 2. Подобрать машины (комплект машин) с учетом рассчитанной вместимости барабана Vбар. Выбор вибраторов. Вибраторы предназначены для уплотнения бетонной смеси в монолитных конструкциях. Рассчитать количество глубинных вибраторов . 1. Требуемая эксплуатационная производительность вибраторов должна быть не менее производительности бетонщиков . Характеристики вибраторов см. прил. 13.
 где")
Псм = ( 8 n 100м³ / Hвр кз) где n – количество рабочих в звене, чел (см. ЕНиР сб.4); Hвр– норма времени, чел.час (по ЕНиР сб.4); Кз – коэффициент, учитывающий условия работы. При зимних условиях работы коэффициент - кз = 1,15, при летних - кз = 1,0. Примечание: n и Hвр принять по ЕНиР сборник 4 «Монтаж сборных и устройство монолитных железобетонных конструкций» параграф §Е4-1-49. 2. Количество вибраторов определить по количеству бетонщиков в звене с учетом одного свободного запасного вибратора, то есть: где n – количество бетонщиков в звене, чел (см. п. Е4-1-49).

Таблица 1. Наименьшая высота забоя, Нз.м, обеспечивающая наполнение ковша с верхом.

Таблица 2. Длина пути волочения ковша на откосе забоя, Lн, м, обеспечивающая наполнение его с верхом.

продолжение табл.2

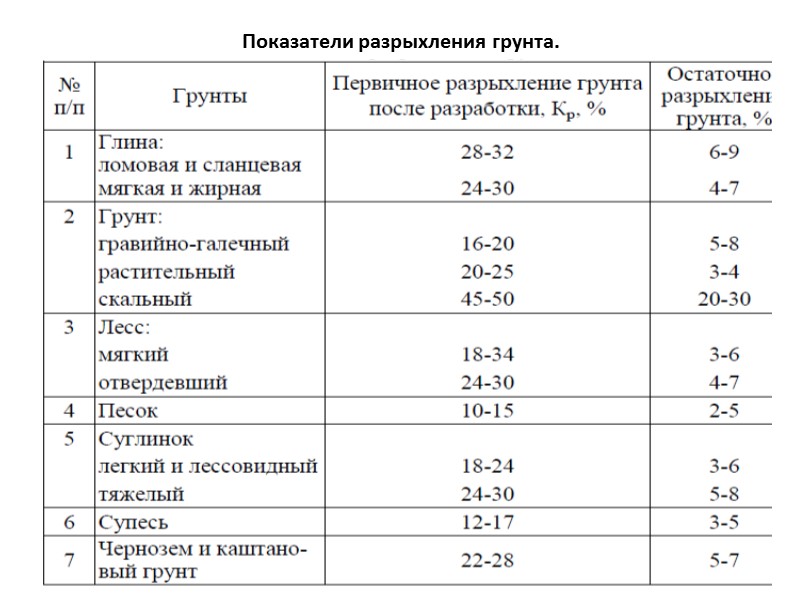
Показатели разрыхления грунта.
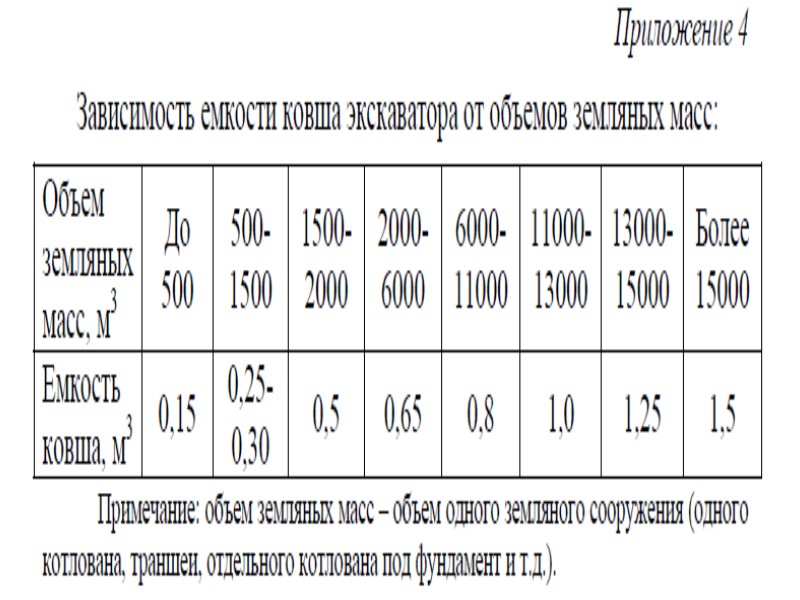
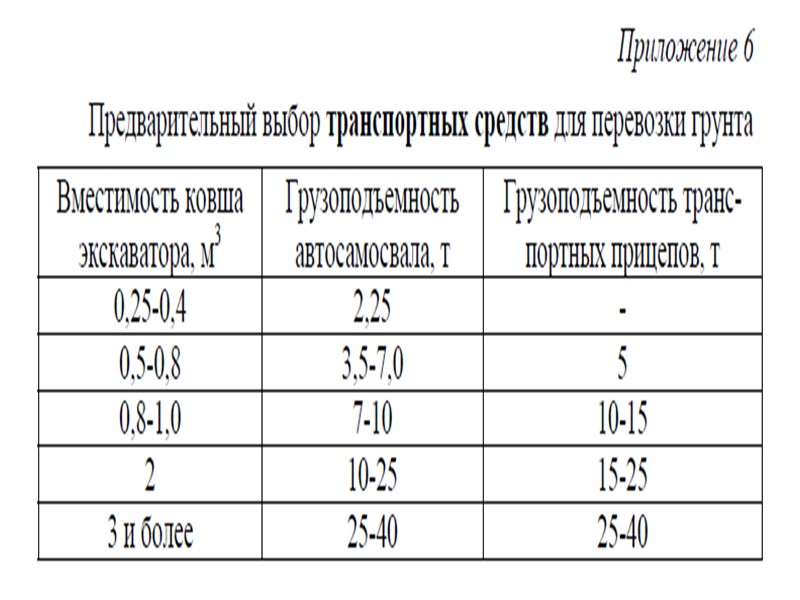
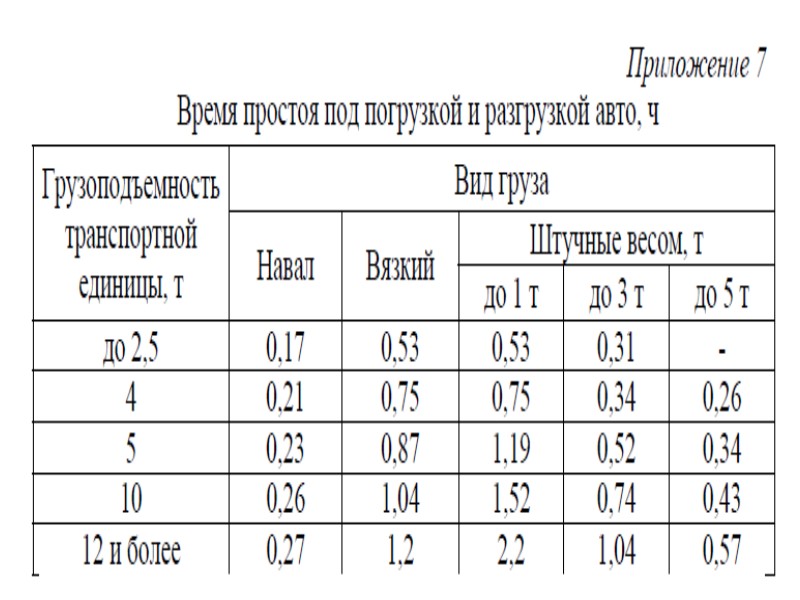
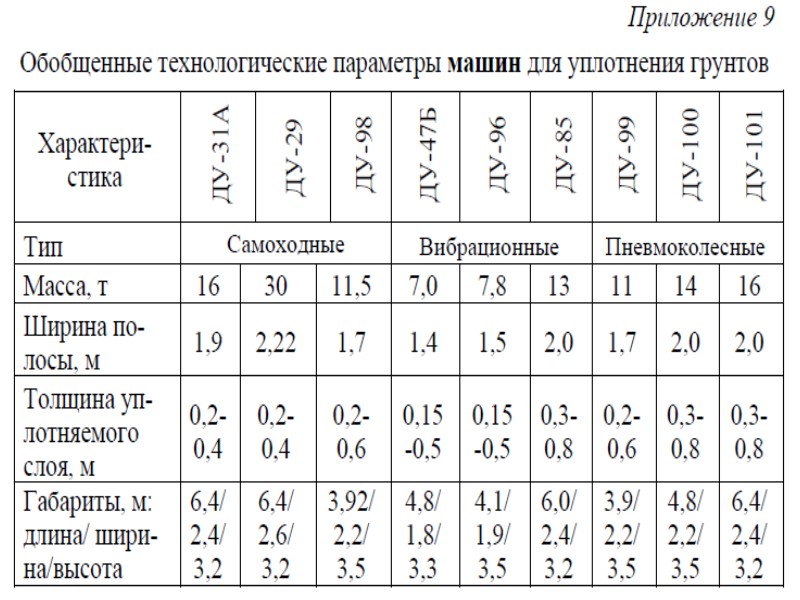
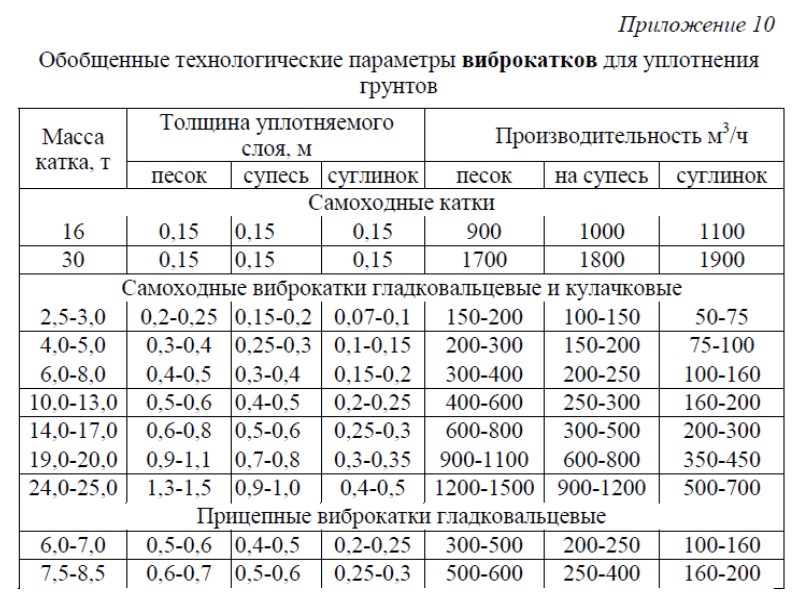
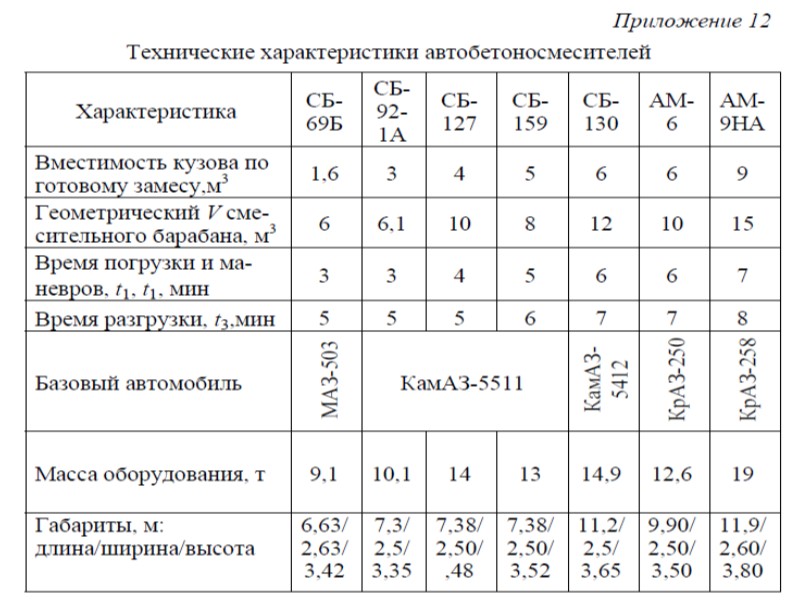
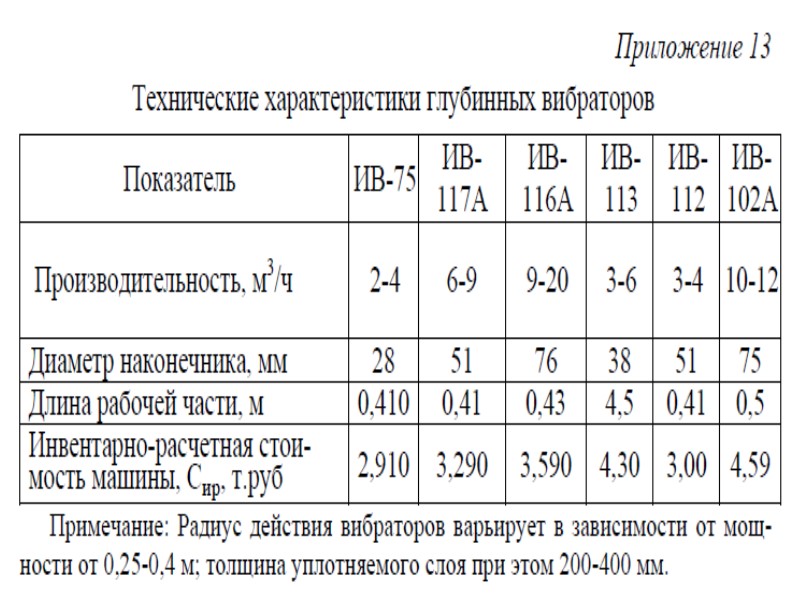

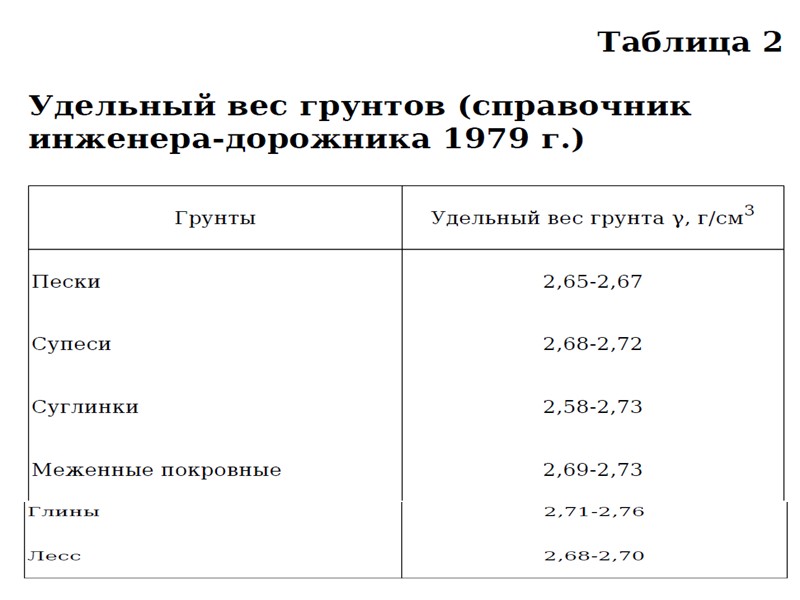
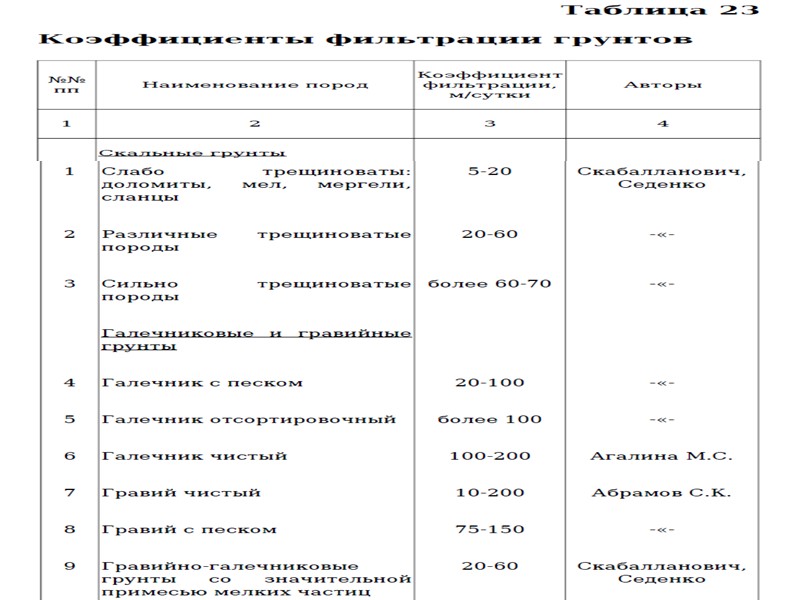
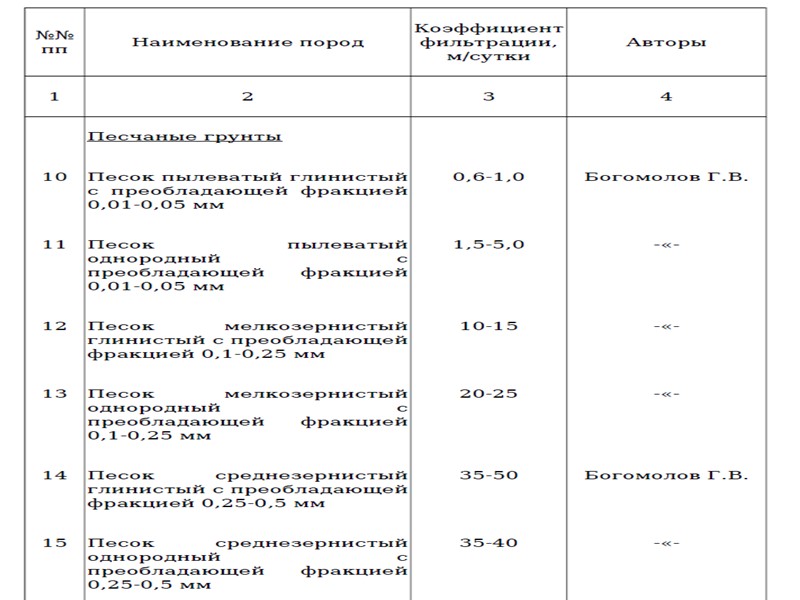
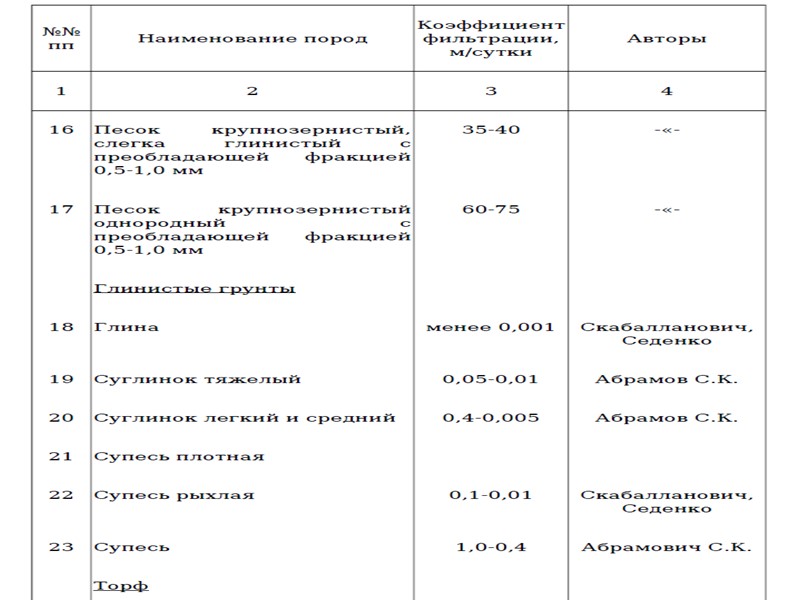
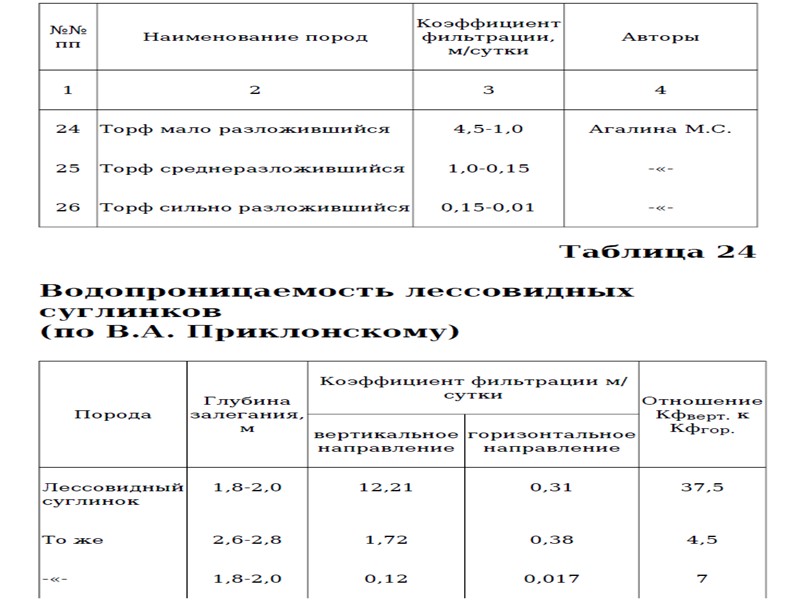
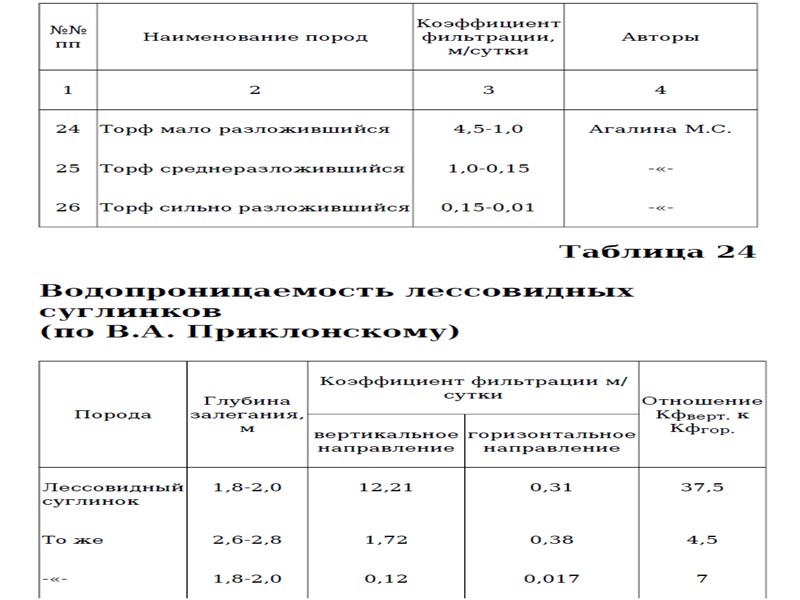
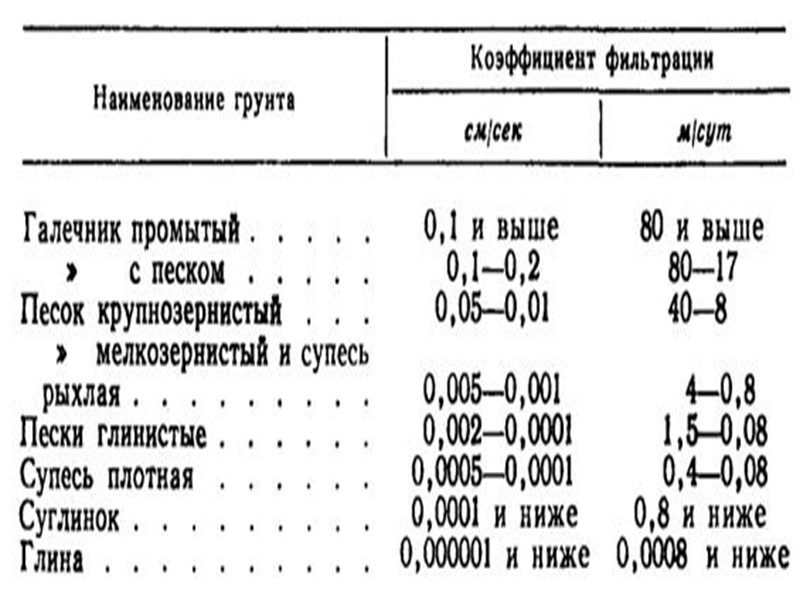
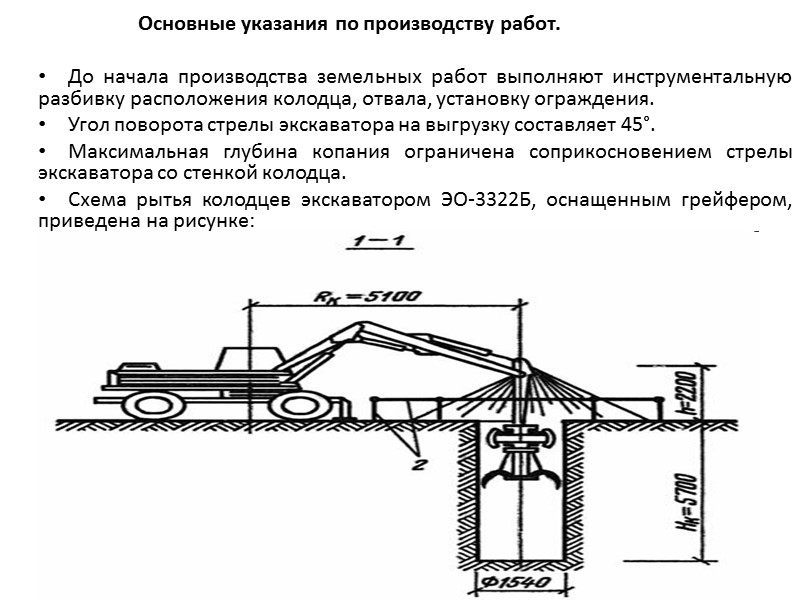
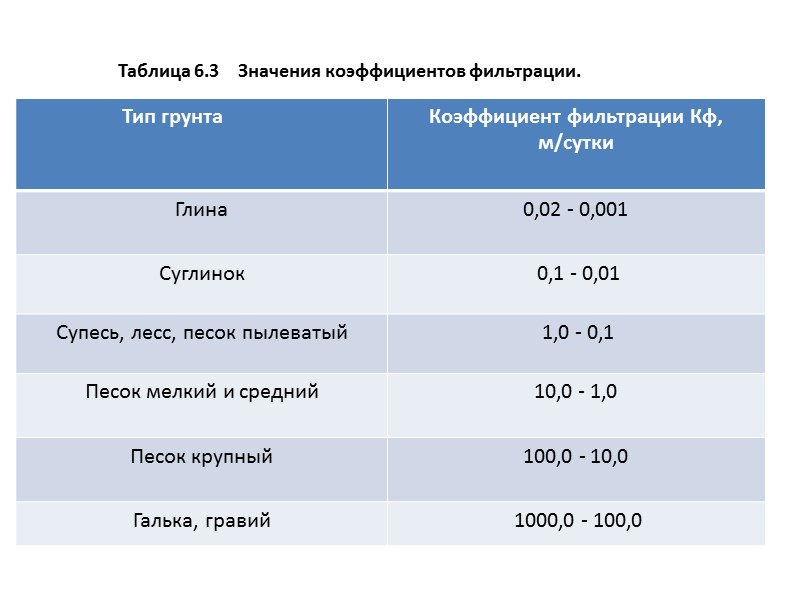
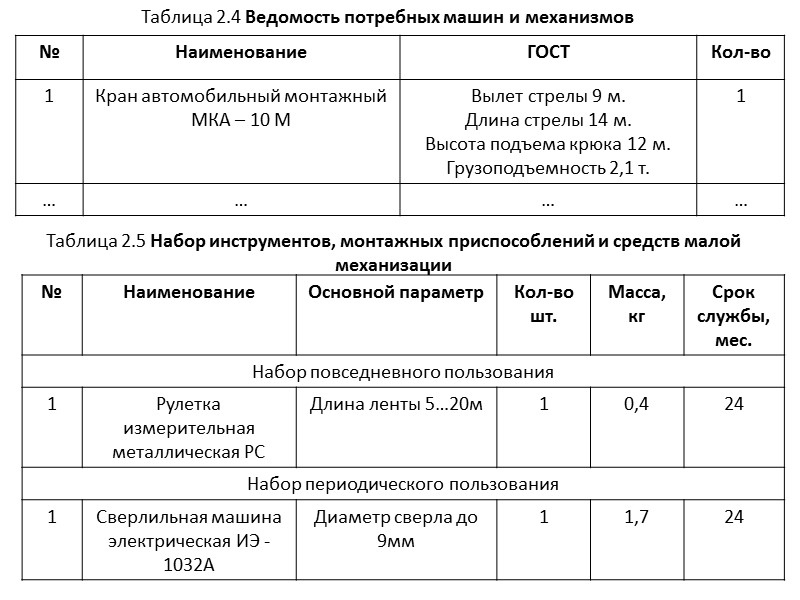

Таблица 6.3 Значения коэффициентов фильтрации.

Таблица 2.4 Ведомость потребных машин и механизмов Таблица 2.5 Набор инструментов, монтажных приспособлений и средств малой механизации
22-tehnologiya_podbor_mashin_dodelannaya.pptx
- Количество слайдов: 71