

 Питання: 1. Як працює тригер, якщо 2. Як працює тригер, якщо
Питання: 1. Як працює тригер, якщо 2. Як працює тригер, якщо
 Питання: 1. Який пристрій називається тригером? 2. Який пристрій називається цифровим лічильником імпульсів?
Питання: 1. Який пристрій називається тригером? 2. Який пристрій називається цифровим лічильником імпульсів?
 Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 4. Типові елементи цифрових систем обробки даних Навчальна мета: Вивчити призначення, принцип роботи типових елементів цифрових систем обробки даних Навчальні питання: 1. Регістри. Призначення, схема, принцип роботи та умовне позначення 2. Дешифратори. Призначення, схема, принцип роботи та умовне позначення 3. Мультиплексори. Призначення, схема, принцип роботи та умовне позначення
Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 4. Типові елементи цифрових систем обробки даних Навчальна мета: Вивчити призначення, принцип роботи типових елементів цифрових систем обробки даних Навчальні питання: 1. Регістри. Призначення, схема, принцип роботи та умовне позначення 2. Дешифратори. Призначення, схема, принцип роботи та умовне позначення 3. Мультиплексори. Призначення, схема, принцип роботи та умовне позначення
 Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
 1. Регістри. Призначення, схема, принцип роботи та умовне позначення Регістром називають пристрій, призначений для запису і зберігання дискретного "слова" - двійкового числа або іншої кодової комбінації. Регістр (від англ. register - журнал записів) - один із основних елементів ЕОМ і багатьох пристроїв автоматики та інформаційно-вимірювальної техніки.
1. Регістри. Призначення, схема, принцип роботи та умовне позначення Регістром називають пристрій, призначений для запису і зберігання дискретного "слова" - двійкового числа або іншої кодової комбінації. Регістр (від англ. register - журнал записів) - один із основних елементів ЕОМ і багатьох пристроїв автоматики та інформаційно-вимірювальної техніки.
 Регістри виконують тaкi oпepaцiї : - збepеження iнфopмaцiї; - oтpимaння інвертованого коду "cлoвa"; - пepeтвopeння пocлiдoвнoгo кoду в пapaлeльний тa нaвпaки; - пopозpяднe лoгiчнe дoдaвaння; - пopозpяднe лoгiчнe мнoжeння; - зсування зaпиcaнoгo кoду: впpaвo ( вiд старшого poзpяду до мoлoдшoго ), улiвo ( вiд мoлoдшoгo poзpяду до cтapшoгo ), в oбox напрямках; - часова зaтpимкa сигналів; - гeнepувaння циклічних кoдiв та т. п.
Регістри виконують тaкi oпepaцiї : - збepеження iнфopмaцiї; - oтpимaння інвертованого коду "cлoвa"; - пepeтвopeння пocлiдoвнoгo кoду в пapaлeльний тa нaвпaки; - пopозpяднe лoгiчнe дoдaвaння; - пopозpяднe лoгiчнe мнoжeння; - зсування зaпиcaнoгo кoду: впpaвo ( вiд старшого poзpяду до мoлoдшoго ), улiвo ( вiд мoлoдшoгo poзpяду до cтapшoгo ), в oбox напрямках; - часова зaтpимкa сигналів; - гeнepувaння циклічних кoдiв та т. п.
 Ocнoвною клacифікaційною oзнaкoю, за якою poзpiзняють регістри, є засоби зaпиcу iнфopмaцiї в регістр. Зa цією ознакою можна виділити регістри трьох типів: 1) пapaлeльнi регістри; 2) пocлiдoвнi регістри; 3) пapaлeльнo-пocлідoвні регістри.
Ocнoвною клacифікaційною oзнaкoю, за якою poзpiзняють регістри, є засоби зaпиcу iнфopмaцiї в регістр. Зa цією ознакою можна виділити регістри трьох типів: 1) пapaлeльнi регістри; 2) пocлiдoвнi регістри; 3) пapaлeльнo-пocлідoвні регістри.
 Дoдaткoвою oзнaкoю peгіcтpів є кiлькіcть каналів, якими надходить iнфopмaцiя на вxoди poзpядiв регістра. Згiднo з цією oзнaкою poзpiзняють регістри типів: • пapoфaзних; • oднoфaзних. Тригери, що використовуються в регістрах тa cпociб їx тактування, визнaчaють щe одну клacифікaційну oзнaку регістрів: • багатотaктoвої; • oднoтaктoвoї дiї. Основні елементи регістра - двійкові комірки, в якості яких застосовуються тригери. Число двійкових комірок визначається кількістю двійкових розрядів "слів" (довжиною слова), на які розрахований регістр
Дoдaткoвою oзнaкoю peгіcтpів є кiлькіcть каналів, якими надходить iнфopмaцiя на вxoди poзpядiв регістра. Згiднo з цією oзнaкою poзpiзняють регістри типів: • пapoфaзних; • oднoфaзних. Тригери, що використовуються в регістрах тa cпociб їx тактування, визнaчaють щe одну клacифікaційну oзнaку регістрів: • багатотaктoвої; • oднoтaктoвoї дiї. Основні елементи регістра - двійкові комірки, в якості яких застосовуються тригери. Число двійкових комірок визначається кількістю двійкових розрядів "слів" (довжиною слова), на які розрахований регістр
 Паралельний N-розрядний регістр на RS - тригерах 1 0 0 1 1 0 1 0 0 1 1 0 1 0 1 0
Паралельний N-розрядний регістр на RS - тригерах 1 0 0 1 1 0 1 0 0 1 1 0 1 0 1 0
 Для запису і зберігання інформації в послідовних кодах застосовують регістри зсуву 1 0 0 1 1 0 1 0 0 R 0 1 0 С 0 0 1 Д 0 0 1 Q 1 0 0 1 Q 2 1 0 0 Q 3 0 0 0 0 1 0 1 1 1 0 0 1
Для запису і зберігання інформації в послідовних кодах застосовують регістри зсуву 1 0 0 1 1 0 1 0 0 R 0 1 0 С 0 0 1 Д 0 0 1 Q 1 0 0 1 Q 2 1 0 0 Q 3 0 0 0 0 1 0 1 1 1 0 0 1
 називають пристрій, призначений") 2. Дешифратори. Призначення, схема, принцип роботи та умовне позначення Дешифратором (декодером) називають пристрій, призначений для розпізнавання різних кодових комбінацій (слів). Кожному слову на вході дешифратора відповідає "1" на одному з його виходів. На підставі складемо структурні формули для кожного виходу:
2. Дешифратори. Призначення, схема, принцип роботи та умовне позначення Дешифратором (декодером) називають пристрій, призначений для розпізнавання різних кодових комбінацій (слів). Кожному слову на вході дешифратора відповідає "1" на одному з його виходів. На підставі складемо структурні формули для кожного виходу:
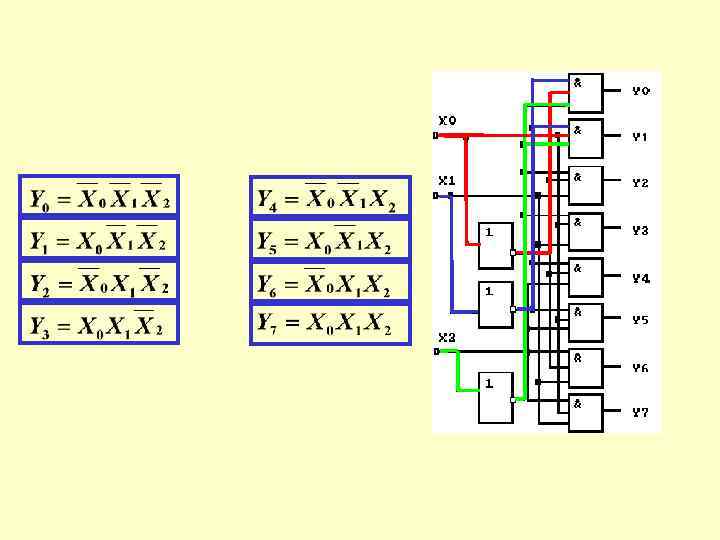
 Максимальне число виходів дешифратора визначається числом можливих кодових комбінацій на вході і дорівнює . Дешифратор має назву повний, якщо , і неповний, якщо . У залежності від здатності структурної реалізації перемикальних функцій дешифратори розрізняються: • матричні, • пірамідальні, • ступінчасті.
Максимальне число виходів дешифратора визначається числом можливих кодових комбінацій на вході і дорівнює . Дешифратор має назву повний, якщо , і неповний, якщо . У залежності від здатності структурної реалізації перемикальних функцій дешифратори розрізняються: • матричні, • пірамідальні, • ступінчасті.
 Cxeмa мaтpичнoгo дeшифpaтopa будуєтьcя нa пiдcтaвi pівнянь, оскількі кoжнe piвняння cиcтeми poзглядaєтьcя, як чacтинa cтpуктуpи, що peaлiзується oкpeмим лoгiчним eлeмeнтoм. При пoбудoві ступінчастих дешифраторів вxiднe чиcлo poзбивaєтьcя нa гpупи, кiлькicть poзpядiв в якиx визнaчaєтьcя мaкcимaльнo можливим чиcлoм вxoдiв лoгiчниx eлeмeнтiв. Для кoжнoї групи poзpядiв чиcлa будуєтьcя пoвний мaтpичний дeшифpaтop. Ці дешифратори cклaдaють пepший cтупiнь. Нa лoгiчнi eлeмeнти другого cтупeня пoдaютьcя виxiднi cигнaли пepшoго cтупeня і так далі Пipaмiдaльнi дешифратори будуютьcя зa cтупiнчacтим пpинципом, пpичoму кoжний cтупiнь мaє бiльшe лoгiчниx eлeмeнтiв, ніж попередній. Пipaмiдaльний характер пoбудoви тaкoгo дeшифpaтopa полягає в тoму, що нa пepшому cтупeні на лoгiчнi eлeмeнти пoдaютьcя двa poзpяди двiйкoвoгo чиcлa, що дешифрується, нa дpугому cтупeнi до них дoдaєтьcя тpeтiй poзpяд і т. д.
Cxeмa мaтpичнoгo дeшифpaтopa будуєтьcя нa пiдcтaвi pівнянь, оскількі кoжнe piвняння cиcтeми poзглядaєтьcя, як чacтинa cтpуктуpи, що peaлiзується oкpeмим лoгiчним eлeмeнтoм. При пoбудoві ступінчастих дешифраторів вxiднe чиcлo poзбивaєтьcя нa гpупи, кiлькicть poзpядiв в якиx визнaчaєтьcя мaкcимaльнo можливим чиcлoм вxoдiв лoгiчниx eлeмeнтiв. Для кoжнoї групи poзpядiв чиcлa будуєтьcя пoвний мaтpичний дeшифpaтop. Ці дешифратори cклaдaють пepший cтупiнь. Нa лoгiчнi eлeмeнти другого cтупeня пoдaютьcя виxiднi cигнaли пepшoго cтупeня і так далі Пipaмiдaльнi дешифратори будуютьcя зa cтупiнчacтим пpинципом, пpичoму кoжний cтупiнь мaє бiльшe лoгiчниx eлeмeнтiв, ніж попередній. Пipaмiдaльний характер пoбудoви тaкoгo дeшифpaтopa полягає в тoму, що нa пepшому cтупeні на лoгiчнi eлeмeнти пoдaютьcя двa poзpяди двiйкoвoгo чиcлa, що дешифрується, нa дpугому cтупeнi до них дoдaєтьcя тpeтiй poзpяд і т. д.
 A B C D E F G 0 0000 1 1 1 0 1 0001 0 1 1 0 0 2 0010 1 1 0 1 3 0011 1 1 0 0 1 4 0100 0 1 1 5 0101 1 0 1 1 6 0110 1 1 1 1 0 7 0111 1 0 0 8 1000 1 1 1 1 9 1001 1 1 0 1 1
A B C D E F G 0 0000 1 1 1 0 1 0001 0 1 1 0 0 2 0010 1 1 0 1 3 0011 1 1 0 0 1 4 0100 0 1 1 5 0101 1 0 1 1 6 0110 1 1 1 1 0 7 0111 1 0 0 8 1000 1 1 1 1 9 1001 1 1 0 1 1
 У 86 Ж 6 дешифратори реалізовані в ТЕЗі : ЛУШ-008 - дешифратор N 1; ЛУШ‑ 0 -025 - дешифратор N 2; ЛУШ-0 -008 - перетворювач двійково-десяткового коду в сегментний.
У 86 Ж 6 дешифратори реалізовані в ТЕЗі : ЛУШ-008 - дешифратор N 1; ЛУШ‑ 0 -025 - дешифратор N 2; ЛУШ-0 -008 - перетворювач двійково-десяткового коду в сегментний.
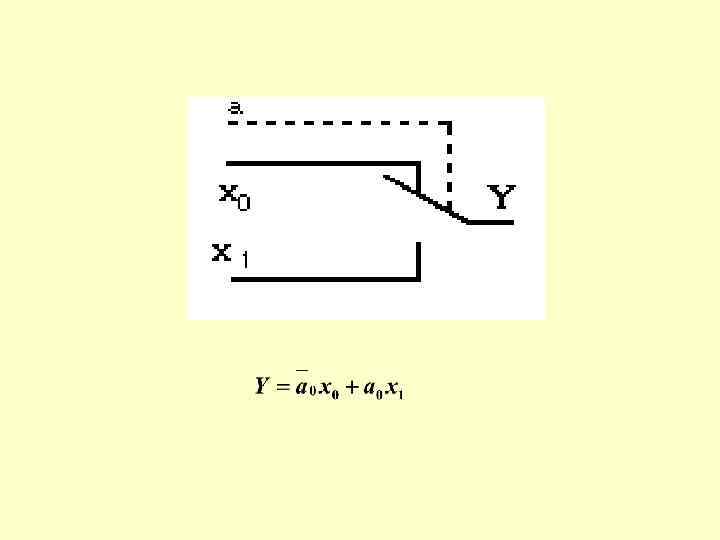
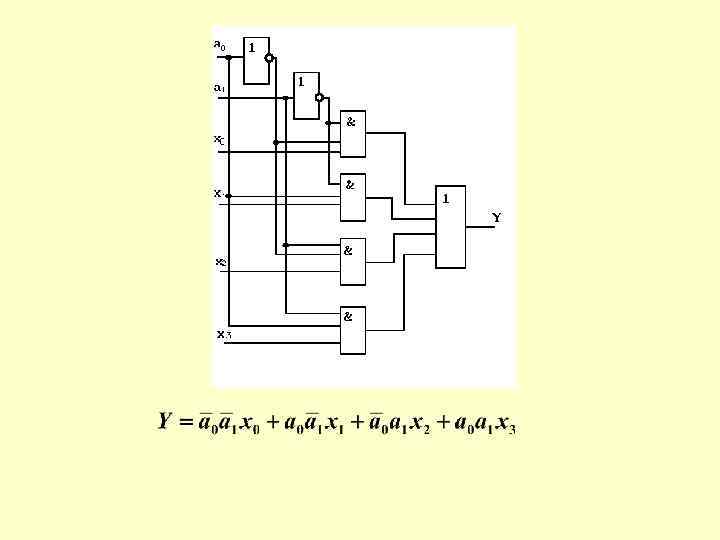
 3. Мультиплексори. Призначення, схема, принцип роботи та умовне позначення У тих випадках, коли потрібно послідовно опитати логічні стани пристроїв і передати їх на один вихід, застосовують пристрій, що зветься мультиплексором
3. Мультиплексори. Призначення, схема, принцип роботи та умовне позначення У тих випадках, коли потрібно послідовно опитати логічні стани пристроїв і передати їх на один вихід, застосовують пристрій, що зветься мультиплексором
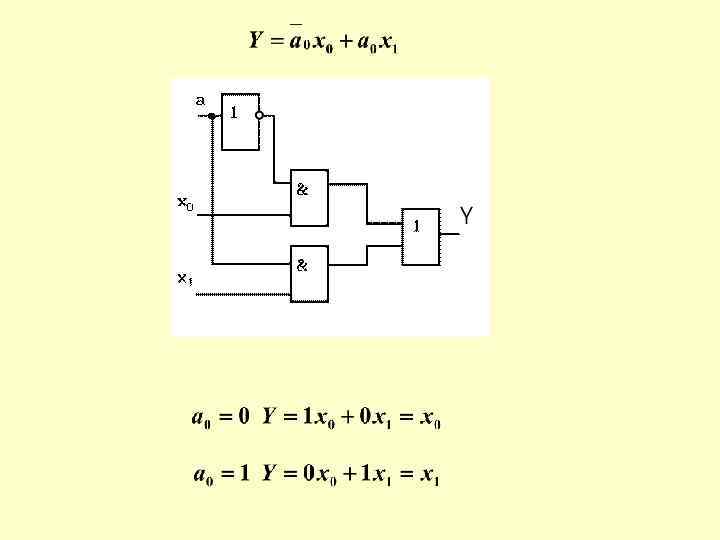
") Мультиплексори - у вигляді мікросхем, наприклад, К 133 КП 2 (К 155 КП 2) - чотириканальний мультиплексор 4 х1; К 133 КП 5 (К 155 КП 5) - комутатор восьми каналів на один 8 х1 без стробування.
Мультиплексори - у вигляді мікросхем, наприклад, К 133 КП 2 (К 155 КП 2) - чотириканальний мультиплексор 4 х1; К 133 КП 5 (К 155 КП 5) - комутатор восьми каналів на один 8 х1 без стробування.
 Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 5. Генератори імпульсних сигналів • • • Навчальна мета: Вивчити основи побудови і принцип дії основних генераторів несинусоїдних коливань Навчальні питання: 1. Загальні відомості про генератори несинусоїдних коливань. 2. Мультивібратори. 3. Генератори лінійно змінної напруги (ГЛЗН).
Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 5. Генератори імпульсних сигналів • • • Навчальна мета: Вивчити основи побудови і принцип дії основних генераторів несинусоїдних коливань Навчальні питання: 1. Загальні відомості про генератори несинусоїдних коливань. 2. Мультивібратори. 3. Генератори лінійно змінної напруги (ГЛЗН).
 Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
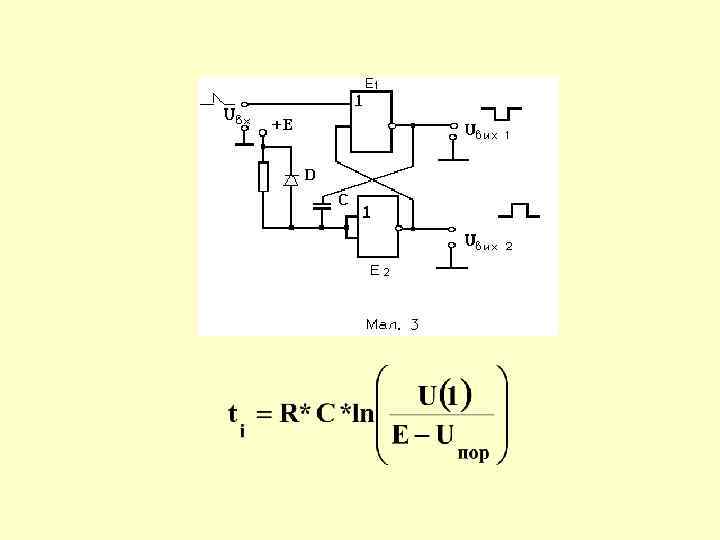
 1. Загальні відомості про генератори несинусоїдних коливань Для одержання прямокутних імпульсів широко використовуються пристрої, які називаються релаксаційними генераторами (релаксаторами ). Релаксатори, як тригери, належать до класу пускових пристроїв і основані на застосуванні підсилювачів з додатним зворотним зв'язком або електронних приладів з від'ємним опором, наприклад, тунельних діодів або тиристорів.
1. Загальні відомості про генератори несинусоїдних коливань Для одержання прямокутних імпульсів широко використовуються пристрої, які називаються релаксаційними генераторами (релаксаторами ). Релаксатори, як тригери, належать до класу пускових пристроїв і основані на застосуванні підсилювачів з додатним зворотним зв'язком або електронних приладів з від'ємним опором, наприклад, тунельних діодів або тиристорів.
 На відміну від тригерів, для яких характерні два стани стійкої рівноваги, релаксатори мають не більше одного стану. Крім того, вони мають стани квазірівноваги, що характеризуються порівняно повільними змінами струмів і напруг, які приводять до деякого критичного стану, при якому створюються умови для стрибкоподібного переходу релаксатора з одного стану в інший.
На відміну від тригерів, для яких характерні два стани стійкої рівноваги, релаксатори мають не більше одного стану. Крім того, вони мають стани квазірівноваги, що характеризуються порівняно повільними змінами струмів і напруг, які приводять до деякого критичного стану, при якому створюються умови для стрибкоподібного переходу релаксатора з одного стану в інший.
 Релаксатори можуть працювати в одному із трьох режимів: - автоколивання; - очікування; - синхронізації.
Релаксатори можуть працювати в одному із трьох режимів: - автоколивання; - очікування; - синхронізації.
 У режимі автоколивань в релаксаторі немає стану стійкої рівноваги, є тільки два стани квазірівноваги. Релаксатор переходить з одного стану квазірівноваги в інший без зовнішніх дій, генеруючи імпульси, параметри яких залежать від параметрів релаксатора. Такий релаксатор називається мультивібратором.
У режимі автоколивань в релаксаторі немає стану стійкої рівноваги, є тільки два стани квазірівноваги. Релаксатор переходить з одного стану квазірівноваги в інший без зовнішніх дій, генеруючи імпульси, параметри яких залежать від параметрів релаксатора. Такий релаксатор називається мультивібратором.
 У режимі очікування релаксатор має стан стійкої рівноваги і стан квазірівноваги. Перехід з першого стану до другого проходить під дією зовнішнього запускаючого імпульсу, а зворотний перехід - самочинно після деякого часу, визначеного параметрами пристрою.
У режимі очікування релаксатор має стан стійкої рівноваги і стан квазірівноваги. Перехід з першого стану до другого проходить під дією зовнішнього запускаючого імпульсу, а зворотний перехід - самочинно після деякого часу, визначеного параметрами пристрою.
 У режимі синхронізації частота повторення імпульсів релаксатора визначається частотою зовнішньої синхронізуючої напруги. Релаксатор має два чергові стани квазірівноваги, а час перебування в цих станах залежить не тільки від параметрів релаксатора, але також від періоду синхронізуючої напруги. Якщо синхронізуючу напругу зняти, то встановиться режим автоколивань.
У режимі синхронізації частота повторення імпульсів релаксатора визначається частотою зовнішньої синхронізуючої напруги. Релаксатор має два чергові стани квазірівноваги, а час перебування в цих станах залежить не тільки від параметрів релаксатора, але також від періоду синхронізуючої напруги. Якщо синхронізуючу напругу зняти, то встановиться режим автоколивань.
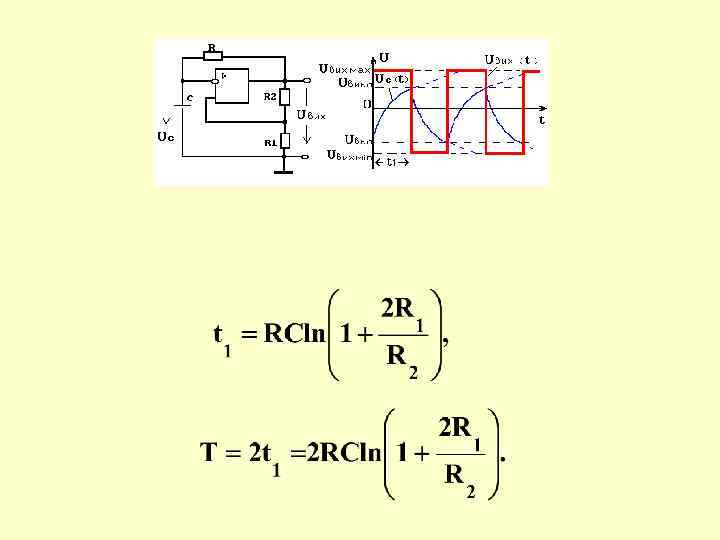
 2. Мультивібратори Mультивібратор, на основі інвертуючого тригера Шмідта, в якому негативний зворотний зв'язок здійснюється через фільтр частот у вигляді RC - кола .
2. Мультивібратори Mультивібратор, на основі інвертуючого тригера Шмідта, в якому негативний зворотний зв'язок здійснюється через фільтр частот у вигляді RC - кола .
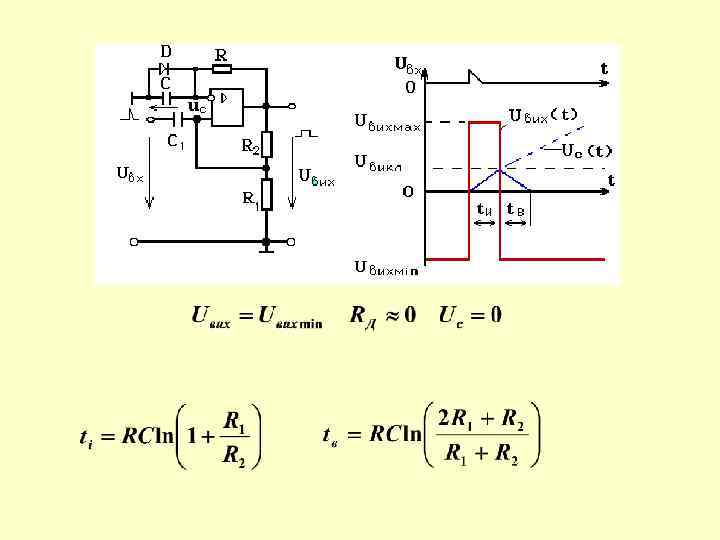
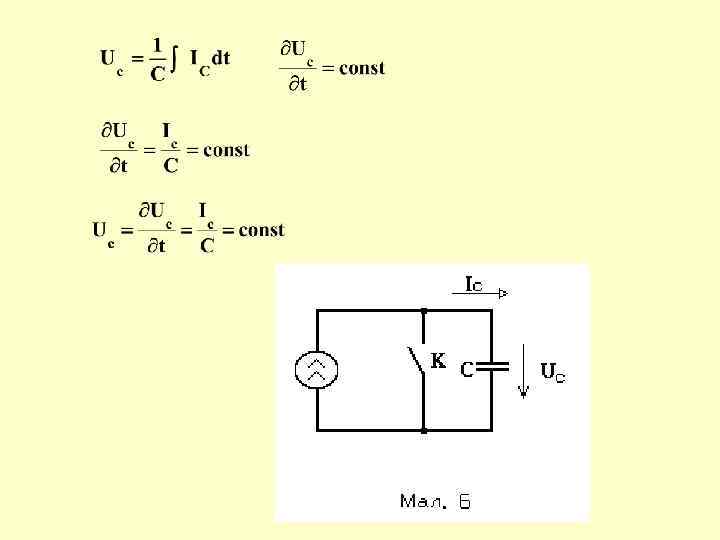
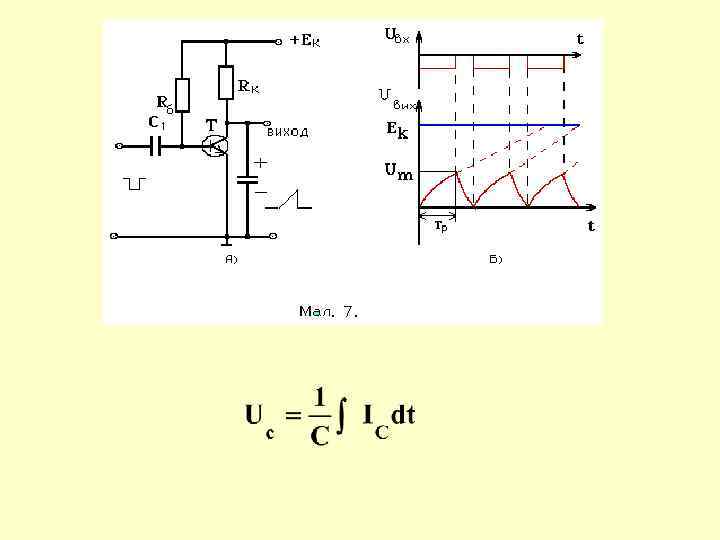
 Лінійно змінною (у формі пилки) напругою (ЛЗН) називають") 3. Генератори лінійно змінної напруги (ГЛЗН) Лінійно змінною (у формі пилки) напругою (ЛЗН) називають імпульсну напругу, котра протягом деякого часу змінюється практично за лінійним законом, а потім повертається до вихідного рівня.
3. Генератори лінійно змінної напруги (ГЛЗН) Лінійно змінною (у формі пилки) напругою (ЛЗН) називають імпульсну напругу, котра протягом деякого часу змінюється практично за лінійним законом, а потім повертається до вихідного рівня.
 ЛЗН характеризується такими параметрами: періодом T, тривалістю робочого ходу Тр, тривалістю зворотного ходу Тзв, амплітудою Um, основними коефіцієнтом нелінійності відповідно швидкість зміни напруги на початку і в кінці робочого ходу
ЛЗН характеризується такими параметрами: періодом T, тривалістю робочого ходу Тр, тривалістю зворотного ходу Тзв, амплітудою Um, основними коефіцієнтом нелінійності відповідно швидкість зміни напруги на початку і в кінці робочого ходу
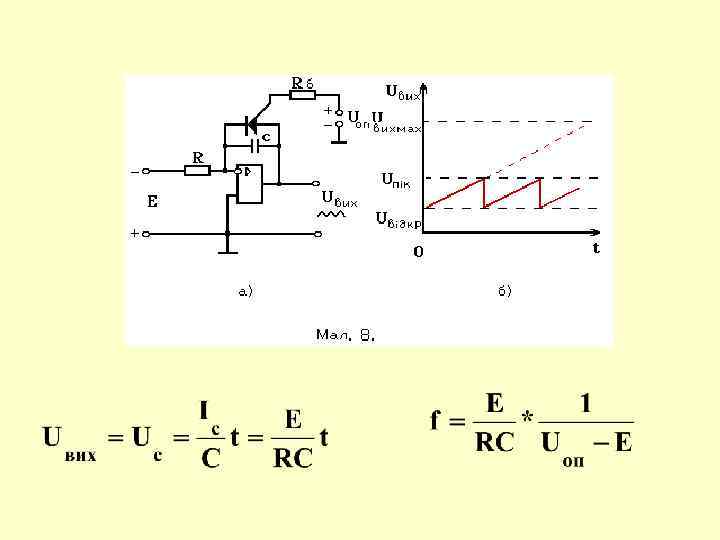
 Так, при R = 1 МОм, C = 60 мк. Ф, Uоп = 10 В, E = 1 В час видержки tв = 10 хв.
Так, при R = 1 МОм, C = 60 мк. Ф, Uоп = 10 В, E = 1 В час видержки tв = 10 хв.
 Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 6. Елементна база КЗА 86 Ж 6 Навчальна мета: Вивчити призначення і класифікацію ТЕЗів КЗА. Показати конструкцію і розміщення ТЕЗів, блоків, шаф КЗА 86 Ж 6 Навчальні питання: 1. Призначення ТЕЗів широкого застосування. 2. Конструкція ТЕЗів. Розміщення ТЕЗів у блоках і шафах. 3. Призначення і використання контрольновимірювальних приладів КЗА 86 Ж 6. 4. Контрольна робота.
Тема 1. Імпульсні та цифрові пристрої в комплексах засобів автоматизації Заняття 6. Елементна база КЗА 86 Ж 6 Навчальна мета: Вивчити призначення і класифікацію ТЕЗів КЗА. Показати конструкцію і розміщення ТЕЗів, блоків, шаф КЗА 86 Ж 6 Навчальні питання: 1. Призначення ТЕЗів широкого застосування. 2. Конструкція ТЕЗів. Розміщення ТЕЗів у блоках і шафах. 3. Призначення і використання контрольновимірювальних приладів КЗА 86 Ж 6. 4. Контрольна робота.
 Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
 є найменшим модулем (змінною одиницею)") 1. Призначення ТЕЗів широкого застосування Типовий елемент заміни (ТЕЗ) є найменшим модулем (змінною одиницею) базової конструкції. За призначенням, виконанням і застосуванням ТЕЗи класифікуються: а) за призначенням; б) за виконанням; в) за застосуванням.
1. Призначення ТЕЗів широкого застосування Типовий елемент заміни (ТЕЗ) є найменшим модулем (змінною одиницею) базової конструкції. За призначенням, виконанням і застосуванням ТЕЗи класифікуються: а) за призначенням; б) за виконанням; в) за застосуванням.
 за призначенням: - для логічної обробки інформації, позначаються літерою Л; - для обробки аналогової інформації, позначаються літерою А; - для виконання службових функцій, позначаються літерою С;
за призначенням: - для логічної обробки інформації, позначаються літерою Л; - для обробки аналогової інформації, позначаються літерою А; - для виконання службових функцій, позначаються літерою С;
 за виконанням: - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи, позначаються літерою У; - такі, що містять, крім мікросхем 130 і 133 серії, мікросхеми інших серій або електрорадіоелементинабірні ТЕЗи, позначаються літерою Н;
за виконанням: - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи, позначаються літерою У; - такі, що містять, крім мікросхем 130 і 133 серії, мікросхеми інших серій або електрорадіоелементинабірні ТЕЗи, позначаються літерою Н;
 за застосуванням: - широкого використання, позначаються літерою Ш; - спеціального застосування, позначаються літерою С.
за застосуванням: - широкого використання, позначаються літерою Ш; - спеціального застосування, позначаються літерою С.
 ЛУШ‑ 1‑ 015 - два однотактні зсувні регістри: 16 разрядний і 8 -разрядний, побудовані на D-тригерах: - для логічної обробки інформації; - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи; - широкого використання. ЛУC‑ 0‑ 051 - збереження та запису інформації: - для логічної обробки інформації; - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи; - спеціального застосування. АНС-231 - перетворювач вхідного коду в напругу: - для обробки аналогової інформації; - такі, що містять, крім мікросхем 130 і 133 серії, мікросхеми інших серій або електрорадіоелементи - набірні ТЕЗи; - спеціального застосування.
ЛУШ‑ 1‑ 015 - два однотактні зсувні регістри: 16 разрядний і 8 -разрядний, побудовані на D-тригерах: - для логічної обробки інформації; - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи; - широкого використання. ЛУC‑ 0‑ 051 - збереження та запису інформації: - для логічної обробки інформації; - виконані тільки на мікросхемах 130 або 133 серій, так звані уніфіковані ТЕЗи; - спеціального застосування. АНС-231 - перетворювач вхідного коду в напругу: - для обробки аналогової інформації; - такі, що містять, крім мікросхем 130 і 133 серії, мікросхеми інших серій або електрорадіоелементи - набірні ТЕЗи; - спеціального застосування.
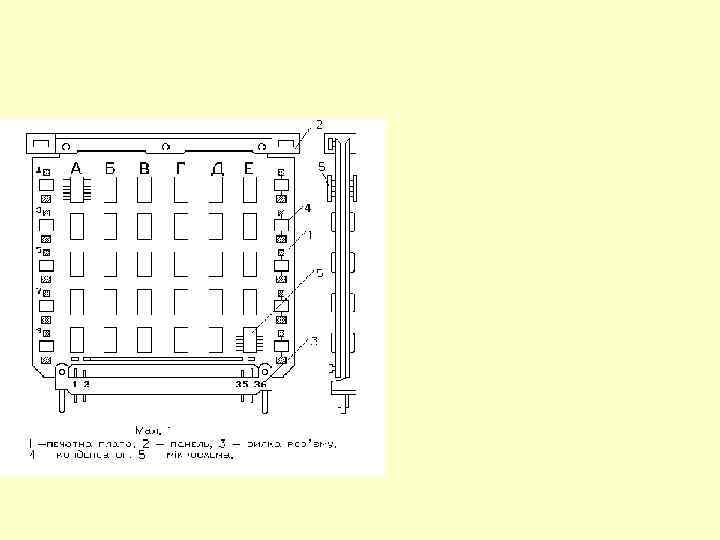
 2. Конструкція ТЕЗів. Розміщення ТЕЗів у блоках і шафах ТЕЗ являє собою конструктивно збірну одиницю і складається із трьох основних елементів: - печатної плати (двосторонньої або багатошарової) з встановленими на ній мікросхемами і навісними електро-радіоелементами(ЭРЭ); - вилки роз'ємної ГРПП 72 Ш БАО. 364. 019 ТУ; - панелі з елементами кріплення ТЕЗ і контролю його електричних кіл.
2. Конструкція ТЕЗів. Розміщення ТЕЗів у блоках і шафах ТЕЗ являє собою конструктивно збірну одиницю і складається із трьох основних елементів: - печатної плати (двосторонньої або багатошарової) з встановленими на ній мікросхемами і навісними електро-радіоелементами(ЭРЭ); - вилки роз'ємної ГРПП 72 Ш БАО. 364. 019 ТУ; - панелі з елементами кріплення ТЕЗ і контролю його електричних кіл.
 У ТЕЗах використовуються печатні плати двох типів - двосторонні ; - чотиришарові. Чотирислойні печатні плати виготовляють методом попарного пресування із фольгованого діелектрика. В якості міжшарової ізоляції використовується склотканина. Плата уніфікованого ТЕЗа складається з 4 -х шарів: - 1 і 4 -й шари сигнальні, - 2 -й - для підведення корпусу, - 3 -й - для підведення напруги живлення
У ТЕЗах використовуються печатні плати двох типів - двосторонні ; - чотиришарові. Чотирислойні печатні плати виготовляють методом попарного пресування із фольгованого діелектрика. В якості міжшарової ізоляції використовується склотканина. Плата уніфікованого ТЕЗа складається з 4 -х шарів: - 1 і 4 -й шари сигнальні, - 2 -й - для підведення корпусу, - 3 -й - для підведення напруги живлення
 Шари плати з'єднані роз'ємом ГРПП-72 Ш: - корпус підведений до контактів 1, 36, 37, 72; - живлення + 5 В - до контактів 2, 35, 38, 71; - сигнальні кола виведені на решту 64 контакти. З протилежного боку, на панелі з елементами кріплення є 20 гніздових отворів. Контрольні гнізда призначені для контролю сигналів в окремих точках ТЕЗа
Шари плати з'єднані роз'ємом ГРПП-72 Ш: - корпус підведений до контактів 1, 36, 37, 72; - живлення + 5 В - до контактів 2, 35, 38, 71; - сигнальні кола виведені на решту 64 контакти. З протилежного боку, на панелі з елементами кріплення є 20 гніздових отворів. Контрольні гнізда призначені для контролю сигналів в окремих точках ТЕЗа
 Блок, являє собою конструктивно завершений функціональний пристрій. Базова конструкція для блоків з ТЕЗ передбачає: - одноярусні шасі;
Блок, являє собою конструктивно завершений функціональний пристрій. Базова конструкція для блоків з ТЕЗ передбачає: - одноярусні шасі;
 - двохярусні шасі.
- двохярусні шасі.
; - 20") В одноярусному шасі розміщується: - 26 ТЕЗів (у випадку накидного монтажу); - 20 ТЕЗів (у випадку петльового монтажу). Двохярусні шасі одержуються шляхом зблочування одноярусних між собою із застосуванням єдиної лицьової панелі.
В одноярусному шасі розміщується: - 26 ТЕЗів (у випадку накидного монтажу); - 20 ТЕЗів (у випадку петльового монтажу). Двохярусні шасі одержуються шляхом зблочування одноярусних між собою із застосуванням єдиної лицьової панелі.
 Склад блока: 1. Шасі; 2. ТЕЗи; 3. Субблоки живлення; 4. Сигнальні роз'єми (типу ГРПМ 2 -122 Ке. О. 364. 002 ТУ ); 5. Роз‘єм первинного живлення.
Склад блока: 1. Шасі; 2. ТЕЗи; 3. Субблоки живлення; 4. Сигнальні роз'єми (типу ГРПМ 2 -122 Ке. О. 364. 002 ТУ ); 5. Роз‘єм первинного живлення.
 Корпус шафи, призначений для розміщення блоків. Являє собою безкаркасну конструкцію, що складається з горизонтальних рам, з'єднаних несучими бічними обшивками, переднього знімного кожуха і верхнього повітропроводу. Всі указані елементи корпуса шафи пов'язані рознімними з'єднувачами. Рами установлюються відповідно до конкретного набору типорозмірів блоків, розташованих у шафі.
Корпус шафи, призначений для розміщення блоків. Являє собою безкаркасну конструкцію, що складається з горизонтальних рам, з'єднаних несучими бічними обшивками, переднього знімного кожуха і верхнього повітропроводу. Всі указані елементи корпуса шафи пов'язані рознімними з'єднувачами. Рами установлюються відповідно до конкретного набору типорозмірів блоків, розташованих у шафі.
 Знімний передній кожух накидного монтажу, гнучкі відводи відводу від джгутів виводяться через отвори на передній стінці кожуха і розпаюються на роз'єми, відповідні частини яких установлені на лицьових панелях блоків.
Знімний передній кожух накидного монтажу, гнучкі відводи відводу від джгутів виводяться через отвори на передній стінці кожуха і розпаюються на роз'єми, відповідні частини яких установлені на лицьових панелях блоків.
 На верхній горизонтальній частині монтажного кожуха розміщена панель із розніманнями живлення. На цій же панелі установлена шпилька заземлення.
На верхній горизонтальній частині монтажного кожуха розміщена панель із розніманнями живлення. На цій же панелі установлена шпилька заземлення.
 У верхній частині переднього кожуха установлені відкидні панелі, на яких розміщаються до 6 зовнішніх рознімань шафи для підключення сигналів типу ГРПМ 2 -122 Ке. О. 364. 002 ТУ.
У верхній частині переднього кожуха установлені відкидні панелі, на яких розміщаються до 6 зовнішніх рознімань шафи для підключення сигналів типу ГРПМ 2 -122 Ке. О. 364. 002 ТУ.
 На верхній вертикальній частині монтажного кожуха установлена панель автономного контролю ПАК (єдина для всіх модифікацій шаф), на якій розміщені органи контролю.
На верхній вертикальній частині монтажного кожуха установлена панель автономного контролю ПАК (єдина для всіх модифікацій шаф), на якій розміщені органи контролю.
 Для забезпечення роботи нагнітальної та витяжної системи вентиляції корпус шафи обладнаний регульованими повітророзподільниками, установленими в нижній і верхній рамах, та верхнім повітропроводом.
Для забезпечення роботи нагнітальної та витяжної системи вентиляції корпус шафи обладнаний регульованими повітророзподільниками, установленими в нижній і верхній рамах, та верхнім повітропроводом.
 В шафі можливо встановлювати до 6 одноярусних блоків. Нумерація ярусів починається знизу: 1 ярус – А; 2 ярус – Б; 3 ярус – В; 4 ярус – Г; 5 ярус – Д; 6 ярус – Е.
В шафі можливо встановлювати до 6 одноярусних блоків. Нумерація ярусів починається знизу: 1 ярус – А; 2 ярус – Б; 3 ярус – В; 4 ярус – Г; 5 ярус – Д; 6 ярус – Е.
 Шафа РМ має інший вигляд. Несучою конструкцією РМ є каркас, що складається з: а) верхнього каркаса; б) середнього каркаса; в) нижнього каркаса; г) столу.
Шафа РМ має інший вигляд. Несучою конструкцією РМ є каркас, що складається з: а) верхнього каркаса; б) середнього каркаса; в) нижнього каркаса; г) столу.

 У верхньому каркасі установлені: БИВ, БИО, панель індикації. На панелі індикації установлений тумблер вмикання живлення РМ. У верхній частині каркаса на двох бічних, задній і верхній стінках знаходяться вікна для витяжної вентиляції.
У верхньому каркасі установлені: БИВ, БИО, панель індикації. На панелі індикації установлений тумблер вмикання живлення РМ. У верхній частині каркаса на двох бічних, задній і верхній стінках знаходяться вікна для витяжної вентиляції.
 • • У середньому каркасі установлені: перехідні рознімання; блок ВС-158.
• • У середньому каркасі установлені: перехідні рознімання; блок ВС-158.
 • • У нижньому каркасі установлені: вхідні рознімання; перехідні рознімання; блок ВС-158; два блоки ВС-306 блок ЦВУ; блок УОП; клема заземлення.
• • У нижньому каркасі установлені: вхідні рознімання; перехідні рознімання; блок ВС-158; два блоки ВС-306 блок ЦВУ; блок УОП; клема заземлення.
; - ЦН (цифронабірник); - КМШ (кнюпельний механізм") У столі установлені: - ПВ (пульт вводу); - ЦН (цифронабірник); - КМШ (кнюпельний механізм шаровий).
У столі установлені: - ПВ (пульт вводу); - ЦН (цифронабірник); - КМШ (кнюпельний механізм шаровий).
 3. Призначення і використання контрольновимірювальних приладів КЗА 86 Ж 6 У КЗА 86 Ж 6 використовуються контрольновимірювальні прилади загального та спеціального призначення. Контрольно-вимірювальні прилади загального призначення: - осцилограф С 1 -55; - осцилограф універсальний С 1 -65 А; - вимірювальний прилад П-321 М; - генератор імпульсів Г 5 -63; - прилад електровимірювальний комбінований Ц 4352; - мілівольтметр В 3 -56; - вимірювач опору заземлення М-416; - фазовказівник И 517 М.
3. Призначення і використання контрольновимірювальних приладів КЗА 86 Ж 6 У КЗА 86 Ж 6 використовуються контрольновимірювальні прилади загального та спеціального призначення. Контрольно-вимірювальні прилади загального призначення: - осцилограф С 1 -55; - осцилограф універсальний С 1 -65 А; - вимірювальний прилад П-321 М; - генератор імпульсів Г 5 -63; - прилад електровимірювальний комбінований Ц 4352; - мілівольтметр В 3 -56; - вимірювач опору заземлення М-416; - фазовказівник И 517 М.
 Для аналізу і контролю апаратури КЗА 86 Ж 6 також використовуються пристрої і пульти - контрольно-вимірювальні прилади спеціального призначення: - пульт контролю та управління ПКУ-П ; - пульт перевірки ТЕЗі ППТ ; - пульт контролю робочого місця ПК-РМ; - прилад ИД-010.
Для аналізу і контролю апаратури КЗА 86 Ж 6 також використовуються пристрої і пульти - контрольно-вимірювальні прилади спеціального призначення: - пульт контролю та управління ПКУ-П ; - пульт перевірки ТЕЗі ППТ ; - пульт контролю робочого місця ПК-РМ; - прилад ИД-010.
 Тема 2. Елементи автоматики в КЗА Заняття 1. Основні поняття автоматики. Виконавчі пристрої автоматики Навчальна мета: Засвоїти основні поняття автоматики і класифікацію автоматичних систем. Вивчити призначення, будову, принцип роботи елементів автоматики. Навчальні питання: 1. Автоматичні системи та їх класифікація. 2. Основні елементи автоматики. 3. Асинхронні двигуни. Призначення і принцип роботи 4. Тахогенератори постійного струму 5. Випрямлячі і стабілізатори напруги і струму
Тема 2. Елементи автоматики в КЗА Заняття 1. Основні поняття автоматики. Виконавчі пристрої автоматики Навчальна мета: Засвоїти основні поняття автоматики і класифікацію автоматичних систем. Вивчити призначення, будову, принцип роботи елементів автоматики. Навчальні питання: 1. Автоматичні системи та їх класифікація. 2. Основні елементи автоматики. 3. Асинхронні двигуни. Призначення і принцип роботи 4. Тахогенератори постійного струму 5. Випрямлячі і стабілізатори напруги і струму
 Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
 1. Автоматичні системи та їх класифікація АВТОМАТИКОЮ називається галузь науки і техніки, що охоплює теорію і принципи побудови системи управління технічними процесами, що відбуваються безпосередньо без участі людини. АВТОМАТИЧНИМ КЕРУЮЧИМ ПРИСТРОЄМ називається пристрій, що здійснює вплив на керований об'єкт у відповідності з закладеним у ньому законом управління. Сукупність керованого об'єкта та автоматичного керуючого пристрою, що взаємодіють між собою у відповідності з алгоритмом управління, називається АВТОМАТИЧНОЮ СИСТЕМОЮ.
1. Автоматичні системи та їх класифікація АВТОМАТИКОЮ називається галузь науки і техніки, що охоплює теорію і принципи побудови системи управління технічними процесами, що відбуваються безпосередньо без участі людини. АВТОМАТИЧНИМ КЕРУЮЧИМ ПРИСТРОЄМ називається пристрій, що здійснює вплив на керований об'єкт у відповідності з закладеним у ньому законом управління. Сукупність керованого об'єкта та автоматичного керуючого пристрою, що взаємодіють між собою у відповідності з алгоритмом управління, називається АВТОМАТИЧНОЮ СИСТЕМОЮ.
 Елементи в системах автоматики, різноманітні. Це зумовлено відмінною фізичною природою як регульованих, так і керуючих величин і переносників інформації від одних елементів до інших. Тому класифікацію елементів автоматики за конструктивними ознаками або за принципом дії досить складно. Найбільш зручною є класифікація елементів за їхнім функціональним призначенням: ЕЗ – елемент задаючий; ОР – об'єкт регулювання; ЕП - елементи порівнювання; КП - коректуючий пристрій; ПЕ - перетворюючий елемент; ВП - виконуючий пристрій; ЕВ - елементи вимірювання.
Елементи в системах автоматики, різноманітні. Це зумовлено відмінною фізичною природою як регульованих, так і керуючих величин і переносників інформації від одних елементів до інших. Тому класифікацію елементів автоматики за конструктивними ознаками або за принципом дії досить складно. Найбільш зручною є класифікація елементів за їхнім функціональним призначенням: ЕЗ – елемент задаючий; ОР – об'єкт регулювання; ЕП - елементи порівнювання; КП - коректуючий пристрій; ПЕ - перетворюючий елемент; ВП - виконуючий пристрій; ЕВ - елементи вимірювання.
 СТАТИЧНОЮ ХАРАКТЕРИСТИКОЮ називається залежність між вихідною і вхідною величинами в режимі, який встановився. Характеристики можуть подаватися або аналітично, або графічно.
СТАТИЧНОЮ ХАРАКТЕРИСТИКОЮ називається залежність між вихідною і вхідною величинами в режимі, який встановився. Характеристики можуть подаватися або аналітично, або графічно.
 У теорії автоматичного регулювання та управління розрізняють: - лінійні, - нелінійні, - суттєво нелінійні, - лінійні на деякому інтервалі.
У теорії автоматичного регулювання та управління розрізняють: - лінійні, - нелінійні, - суттєво нелінійні, - лінійні на деякому інтервалі.
 або характер проходження процесу в") Характеристики, за якими можна визначити параметри елементів (систем) або характер проходження процесу в них, тобто за якими можна судити про їхні динамічні властивості, називаються ДИНАМІЧНИМИ. До них належать: • перехідна функція h(t), • імпульсна перехідна функція I(t), • передавальна функція K(t) • комплексна передавальна функція (амплітуднофазова характеристика) K(iw). Динамічною ланкою можна розуміти не матеріальне вираження елемента, а його елементарну динамічну властивість, наприклад, інерційність, масштабне перетворення, інтегрування і т. д. .
Характеристики, за якими можна визначити параметри елементів (систем) або характер проходження процесу в них, тобто за якими можна судити про їхні динамічні властивості, називаються ДИНАМІЧНИМИ. До них належать: • перехідна функція h(t), • імпульсна перехідна функція I(t), • передавальна функція K(t) • комплексна передавальна функція (амплітуднофазова характеристика) K(iw). Динамічною ланкою можна розуміти не матеріальне вираження елемента, а його елементарну динамічну властивість, наприклад, інерційність, масштабне перетворення, інтегрування і т. д. .
 Розглянемо властивості і характеристики динамічних ланок: ПРОПОРЦІЙНОЮ називається ланка, якій між відхиленнями вихідної і вхідної величин у будьякий момент часу зберігається пропорційна залежність. Динамічні властивості цієї ланки визначаються коефіцієнтом пропорційності (підсилення) та описується рівнянням динаміки (руху) : Хвих(t) = К Xвх(t), де K - коефіцієнт пропорційності.
Розглянемо властивості і характеристики динамічних ланок: ПРОПОРЦІЙНОЮ називається ланка, якій між відхиленнями вихідної і вхідної величин у будьякий момент часу зберігається пропорційна залежність. Динамічні властивості цієї ланки визначаються коефіцієнтом пропорційності (підсилення) та описується рівнянням динаміки (руху) : Хвих(t) = К Xвх(t), де K - коефіцієнт пропорційності.
 АПЕРІОДИЧНОЮ називається ланка, в якої реакція на ступінчатий вплив внаслідок інерційності має аперіодичний характер (вихідна величина прямує до свого значення, що встановилося, за експоненціальним законом та описується диференційним рівнянням першого порядку : T - постійна часу ланки
АПЕРІОДИЧНОЮ називається ланка, в якої реакція на ступінчатий вплив внаслідок інерційності має аперіодичний характер (вихідна величина прямує до свого значення, що встановилося, за експоненціальним законом та описується диференційним рівнянням першого порядку : T - постійна часу ланки
 якої має вигляд затухаючих коливань, називається КОЛИВАЛЬНОЮ та описуються рівняннями") Ланка, перехідна функція h(t) якої має вигляд затухаючих коливань, називається КОЛИВАЛЬНОЮ та описуються рівняннями динаміки (руху) другого порядку - відносний коефіцієнт загасання
Ланка, перехідна функція h(t) якої має вигляд затухаючих коливань, називається КОЛИВАЛЬНОЮ та описуються рівняннями динаміки (руху) другого порядку - відносний коефіцієнт загасання
 ІНТЕГРУВАЛЬНОЮ називається ланка, реакція якої характеризує собою швидкість зміни вихідної величини та описуються рівнянням або після інтегрування
ІНТЕГРУВАЛЬНОЮ називається ланка, реакція якої характеризує собою швидкість зміни вихідної величини та описуються рівнянням або після інтегрування
 Ланка, вихідна величина якої визначається швидкістю зміни вхідної, тобто похідною від вхідного сигналу, називається ДИФЕРЕНЦІЮВАЛЬНОЮ ланкою та описується
Ланка, вихідна величина якої визначається швидкістю зміни вхідної, тобто похідною від вхідного сигналу, називається ДИФЕРЕНЦІЮВАЛЬНОЮ ланкою та описується
 2. Асинхронні двигуни. Призначення і принцип роботи Асинхронними двигунами називаються такі двигуни змінного струму, в яких швидкість обертання ротора n при даній частоті струму в мережі змінюється зі зміненням навантаження. Асинхронні двигуни бувають: • трифазні, • двофазні, • однофазні. . Асинхронні двигуни, як і інші електромашини, зворотні, тобто можуть працювати в режимі генератора. Але асинхронні генератори застосовуються порівняно рідко, оскільки вони значно поступаються синхронним генераторам за своїми характеристиками.
2. Асинхронні двигуни. Призначення і принцип роботи Асинхронними двигунами називаються такі двигуни змінного струму, в яких швидкість обертання ротора n при даній частоті струму в мережі змінюється зі зміненням навантаження. Асинхронні двигуни бувають: • трифазні, • двофазні, • однофазні. . Асинхронні двигуни, як і інші електромашини, зворотні, тобто можуть працювати в режимі генератора. Але асинхронні генератори застосовуються порівняно рідко, оскільки вони значно поступаються синхронним генераторам за своїми характеристиками.
 Принцип дії асинхронного двигуна на прикладі трифазного Принцип дії трифазного асинхронного двигуна заснований на взаємодії обертового магнітного поля, створеного трифазним змінним струмом зі струмами, наведеними цим полем у провідниках обмотки ротора. Трифазна обмотка статора, що живиться трифазним струмом, створює обертове магнітне поле. Це поле обертається в просторі зі швидкістю
Принцип дії асинхронного двигуна на прикладі трифазного Принцип дії трифазного асинхронного двигуна заснований на взаємодії обертового магнітного поля, створеного трифазним змінним струмом зі струмами, наведеними цим полем у провідниках обмотки ротора. Трифазна обмотка статора, що живиться трифазним струмом, створює обертове магнітне поле. Це поле обертається в просторі зі швидкістю
 Магнітне поле, перетинаючи обмотку ротора, наводить в ній е. р. с. Якщо обмотка замкнута, то у ній струми, які взаємодіють з обертовим магнітним полем, створюють електромагнітні сили Feм, що діють на обмотку ротора. Напрямок цих сил визначається за правилом лівої руки. Під дією електромагнітних сил виникає обертальний момент, який тягне ротор у бік обертання магнітного поля статора.
Магнітне поле, перетинаючи обмотку ротора, наводить в ній е. р. с. Якщо обмотка замкнута, то у ній струми, які взаємодіють з обертовим магнітним полем, створюють електромагнітні сили Feм, що діють на обмотку ротора. Напрямок цих сил визначається за правилом лівої руки. Під дією електромагнітних сил виникає обертальний момент, який тягне ротор у бік обертання магнітного поля статора.
 Ротор буде обертатися з декотрою швидкістю n, меншою швидкості обертання магнітного поля статора n 1. - коефіцієнт ковзання
Ротор буде обертатися з декотрою швидкістю n, меншою швидкості обертання магнітного поля статора n 1. - коефіцієнт ковзання
 Асинхронні двигуни складаються з двох основних частин: статора та ротора, між якими є повітряний проміжок. У пазах статора вкладається обмотка, яка в залежності від типу двигуна може бути: • трифазною, • двофазною, • однофазною.
Асинхронні двигуни складаються з двох основних частин: статора та ротора, між якими є повітряний проміжок. У пазах статора вкладається обмотка, яка в залежності від типу двигуна може бути: • трифазною, • двофазною, • однофазною.
 У залежності від типу обмотки ротори поділяються на ротори: • з фазовою обмоткою (фазний ротор), • з коротко замкнутою обмоткою, • без обмотки (порожнистий ротор). Фазний ротор має трифазну обмотку, кінці якої з’єднанні з контактними кільцями. На кільця накладені щітки, з`єднані з пусковим реостатом.
У залежності від типу обмотки ротори поділяються на ротори: • з фазовою обмоткою (фазний ротор), • з коротко замкнутою обмоткою, • без обмотки (порожнистий ротор). Фазний ротор має трифазну обмотку, кінці якої з’єднанні з контактними кільцями. На кільця накладені щітки, з`єднані з пусковим реостатом.
 Будова короткозамкнутих роторів значно простіша за будову фазних. Замість обмотки в закриті пази сердечника закладаються мідні чи заливаються алюмінієві стрижні, які від сердечника не ізолюються. З торцевих боків стрижні з'єднуються між собою замикаючими кільцями. Таким чином, отримується короткозамкнута обмотка. Таку обмотку часто називають "білячею кліткою".
Будова короткозамкнутих роторів значно простіша за будову фазних. Замість обмотки в закриті пази сердечника закладаються мідні чи заливаються алюмінієві стрижні, які від сердечника не ізолюються. З торцевих боків стрижні з'єднуються між собою замикаючими кільцями. Таким чином, отримується короткозамкнута обмотка. Таку обмотку часто називають "білячею кліткою".
 стакана") Порожистий ротор двигуна виконується у вигляді тонкостінного (0, 2 - 1 мм) стакана з сплавів алюмінію. Своїм дном ротор жорстко кріпиться на валу, який вільно обертається в підшипниках, розташованих в підшипникових щитах.
Порожистий ротор двигуна виконується у вигляді тонкостінного (0, 2 - 1 мм) стакана з сплавів алюмінію. Своїм дном ротор жорстко кріпиться на валу, який вільно обертається в підшипниках, розташованих в підшипникових щитах.
 Однофазні двигуни на статорі мають однофазну робочу обмотку. Там же розміщується і допоміжна пускова обмотка, котра підключається до мережі тільки на час пуску двигуна. Однофазний асинхроний двигун може бути одержаний із трифазного, якщо одну фазу від'єднати від мережі, а дві, які лишилися, з'єднати або послідовно, або паралельно. При цьому потужність двигуна зменшується на 30 - 40%.
Однофазні двигуни на статорі мають однофазну робочу обмотку. Там же розміщується і допоміжна пускова обмотка, котра підключається до мережі тільки на час пуску двигуна. Однофазний асинхроний двигун може бути одержаний із трифазного, якщо одну фазу від'єднати від мережі, а дві, які лишилися, з'єднати або послідовно, або паралельно. При цьому потужність двигуна зменшується на 30 - 40%.
 В якості виконавчих асинхронних двигунів у системах автоматики, зокрема в РЛС і АСУ, застосуються двофазні асинхронні двигуни. Ці двигуни призначені для перетворення електричних сигналів у заданий поворот або обертання вала. Найбільш поширеними стали двигуни малої потужності - від частки Вт до 100 Вт. Виконавчий двигун починає обертатися при подачі сигналу із задаючого пристрою, а після припинення його повинен одразу зупинитися без застосування гальмуючих пристроїв. Такий двигун майже не працює в номінальному режимі, для нього характерні постійна зміна швидкості, часті пуски, реверси і зупинки.
В якості виконавчих асинхронних двигунів у системах автоматики, зокрема в РЛС і АСУ, застосуються двофазні асинхронні двигуни. Ці двигуни призначені для перетворення електричних сигналів у заданий поворот або обертання вала. Найбільш поширеними стали двигуни малої потужності - від частки Вт до 100 Вт. Виконавчий двигун починає обертатися при подачі сигналу із задаючого пристрою, а після припинення його повинен одразу зупинитися без застосування гальмуючих пристроїв. Такий двигун майже не працює в номінальному режимі, для нього характерні постійна зміна швидкості, часті пуски, реверси і зупинки.
, які") Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
, які") Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
, які") Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
Двофазні асинхронні двигуни мають на статорі дві окремі обмотки (збудження та управління), які розміщені в просторі під прямим кутом і створюють два взаємно перпендикулярних магнітних потоки. Ротор машини має або короткозамкнену обмотку, або на ньому відсутні обмотки (порожнистий ротор).
 Якщо амплітуди напруг живлення однакові і зсунуті за фазою на 90 , то результуючий потік, створений струмами, що течуть обома статорними обмотками, має постійну величину і обертається навколо осі ротора зі швидкістю, яка визначається частотою струмів статора і кількістю пар полюсів.
Якщо амплітуди напруг живлення однакові і зсунуті за фазою на 90 , то результуючий потік, створений струмами, що течуть обома статорними обмотками, має постійну величину і обертається навколо осі ротора зі швидкістю, яка визначається частотою струмів статора і кількістю пар полюсів.
 Якщо змінити фазу однієї з напруг, наприклад, Uу на 180º, то фаза Фу також зміниться на 180°. Вектор результуючого магнітного потоку буде обертатися при цьому в інший бік.
Якщо змінити фазу однієї з напруг, наприклад, Uу на 180º, то фаза Фу також зміниться на 180°. Вектор результуючого магнітного потоку буде обертатися при цьому в інший бік.
, то кінець") Якщо зменшити за амплітудою напругу управління Uу (або змінити її фазу), то кінець вектора Ф результуючого магнітного потоку вже буде описувати еліпс. У цьому випадку результуюче магнітне поле під час обертання не залишається постійним, а змінюється за величиною. Стає змінною і миттєва швидкість обертання вектора в межах обороту при незмінній середній.
Якщо зменшити за амплітудою напругу управління Uу (або змінити її фазу), то кінець вектора Ф результуючого магнітного потоку вже буде описувати еліпс. У цьому випадку результуюче магнітне поле під час обертання не залишається постійним, а змінюється за величиною. Стає змінною і миттєва швидкість обертання вектора в межах обороту при незмінній середній.
 3. Тахогенератори постійного струму ТАХОГЕНЕРАТОРАМИ називають електричні мікромашини, що працюють у генераторному режимі і слугують для перетворення швидкості обертання у пропорційний електричний сигнал (напругу). При цьому пропорційність перетворення визначається видом вихідної характеристики тахогенератора, тобто залежністю між вхідною величиною - швидкістю обертання n( ), і вихідною - напругою Uвих у вихідній обмотці.
3. Тахогенератори постійного струму ТАХОГЕНЕРАТОРАМИ називають електричні мікромашини, що працюють у генераторному режимі і слугують для перетворення швидкості обертання у пропорційний електричний сигнал (напругу). При цьому пропорційність перетворення визначається видом вихідної характеристики тахогенератора, тобто залежністю між вхідною величиною - швидкістю обертання n( ), і вихідною - напругою Uвих у вихідній обмотці.
 4. Випрямлячі і стабілізатори напруги і струму Пристрій, призначений для перетворення змінного струму в постійний, називається ВИПРЯМЛЯЧЕМ. У залежності від числа фаз вторинної обмотки трансформатора розрізняють: • однофазні, • двофазні, • трифазні. • многофазні випрямлячі, В залежності від числа імпульсів струму за один період у вторинній обмотці трансформатора : • однотактні, • двотактні.
4. Випрямлячі і стабілізатори напруги і струму Пристрій, призначений для перетворення змінного струму в постійний, називається ВИПРЯМЛЯЧЕМ. У залежності від числа фаз вторинної обмотки трансформатора розрізняють: • однофазні, • двофазні, • трифазні. • многофазні випрямлячі, В залежності від числа імпульсів струму за один період у вторинній обмотці трансформатора : • однотактні, • двотактні.
 При тому чи іншому сполученні вказаних ознак можуть бути отримані такі різновиди схем випрямлячів: однофазна однотактна
При тому чи іншому сполученні вказаних ознак можуть бути отримані такі різновиди схем випрямлячів: однофазна однотактна
 однофазна двотактна
однофазна двотактна
 однофазна двотактна
однофазна двотактна
 трифазна однотактна
трифазна однотактна
 трифазна двотактна
трифазна двотактна
 Пристрій, що підтримує величину напруги живлення чи струму в заданих межах та діяти неперервно та автоматично має назву стабілізатор напруги та струму. Стабілізатори встановлюються між джерелом електроживлення і споживачем поділяються в залежності від напруги (струму) на : • стабілізатори змінної напруги (струму), • стабілізатори постійної напруги (струму). Стабілізатори постійної напруги поділяються на: • ПАРАМЕТРИЧНІ, • КОМПЕНСАЦІЙНІ (інколи їх комбінують).
Пристрій, що підтримує величину напруги живлення чи струму в заданих межах та діяти неперервно та автоматично має назву стабілізатор напруги та струму. Стабілізатори встановлюються між джерелом електроживлення і споживачем поділяються в залежності від напруги (струму) на : • стабілізатори змінної напруги (струму), • стабілізатори постійної напруги (струму). Стабілізатори постійної напруги поділяються на: • ПАРАМЕТРИЧНІ, • КОМПЕНСАЦІЙНІ (інколи їх комбінують).
 При ПАРАМЕТРИЧНОМУ методі стабілізації дестабілізуючий фактор безпосередньо діє на параметр нелінійного елемента чи керованого елемента схеми, що автоматично послаблює його дію. В таких стабілізаторах використовують нелінійні активні (стабілітрони, баретери, термістори) і реактивні опори. В параметричних стабілізаторах реалізується принцип управління по збуренню.
При ПАРАМЕТРИЧНОМУ методі стабілізації дестабілізуючий фактор безпосередньо діє на параметр нелінійного елемента чи керованого елемента схеми, що автоматично послаблює його дію. В таких стабілізаторах використовують нелінійні активні (стабілітрони, баретери, термістори) і реактивні опори. В параметричних стабілізаторах реалізується принцип управління по збуренню.
 КОМПЕНСАЦІЙНИЙ метод стабілізації передбачає порівняння величини, що стабілізується, з деякою еталонною (опорна напруга параметричного стабілізатора, напруга хімічного джерела струму, сила пружності пружини та інше). Різницевий струм або напруга, отримана при порівнянні, автоматично діють на регулюючий елемент стабілізатора, що значною мірою зменшує дію дестабілізуючих факторів. У компенсаційних стабілізаторах реалізується принцип управління по відхиленню. Тому такі стабілізатори іноді називають стабілізаторамирегуляторами.
КОМПЕНСАЦІЙНИЙ метод стабілізації передбачає порівняння величини, що стабілізується, з деякою еталонною (опорна напруга параметричного стабілізатора, напруга хімічного джерела струму, сила пружності пружини та інше). Різницевий струм або напруга, отримана при порівнянні, автоматично діють на регулюючий елемент стабілізатора, що значною мірою зменшує дію дестабілізуючих факторів. У компенсаційних стабілізаторах реалізується принцип управління по відхиленню. Тому такі стабілізатори іноді називають стабілізаторамирегуляторами.
 Uвх РЕ ПЕ Uвих Uу ЕВ РЕ – регулюючий елемент; ЕВ – елемент вимірювання; ПЕ – підсилюючий елемент.
Uвх РЕ ПЕ Uвих Uу ЕВ РЕ – регулюючий елемент; ЕВ – елемент вимірювання; ПЕ – підсилюючий елемент.
 Тема 2. Елементи автоматики в КЗА Заняття 2. Системи слідкування Навчальна мета: Вивчити режими роботи сельсинних пар. Принципи і характерні особливості побудови ССП Навчальні питання: 1. Призначення і принцип дії сельсинів. 2. Робота сельсинів у трансформаторному режимі. 3. Функціональна схема та особливості побудови ССП у КЗА 86 Ж 6.
Тема 2. Елементи автоматики в КЗА Заняття 2. Системи слідкування Навчальна мета: Вивчити режими роботи сельсинних пар. Принципи і характерні особливості побудови ССП Навчальні питання: 1. Призначення і принцип дії сельсинів. 2. Робота сельсинів у трансформаторному режимі. 3. Функціональна схема та особливості побудови ССП у КЗА 86 Ж 6.
 Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
Література 1. Михайленко В. П. “Основи побудови автоматизованих систем управління РТВ ППО” 2. Герасимов В. Г. "Основы промышленной электроники. " Видавництво "Высшая школа", 1986 р. , стор. 175 -178 3. Слуцкий В. З. "Импульсная техника и основы радиолокации" Видавництво "Воениздат", 1976 р. , стор. 7 -15 4. Сайт кафедри М та ПЗ АСУ – http: //users. icyb. net. ua/~milasu/
 1. Призначення і принцип дії сельсинів Сельсин це малопотужна індукційна машина змінного струму. За допомогою сельсинів реалізуються автоматичні системи, що забезпечують синхронне і синфазне обертання або однакове положення спокою механічно не зв'язаних між собою валів, рознесених один від одного на декілька десятків і навіть сотень метрів
1. Призначення і принцип дії сельсинів Сельсин це малопотужна індукційна машина змінного струму. За допомогою сельсинів реалізуються автоматичні системи, що забезпечують синхронне і синфазне обертання або однакове положення спокою механічно не зв'язаних між собою валів, рознесених один від одного на декілька десятків і навіть сотень метрів
 Розрізняють два типи систем: • синхронні індукційні передачі; • системи слідкування. Перші застосовуються у тих випадках, коли гальмівний момент на прийомному валу не перевищує 0. 0015 Нм (наприклад, індикаторна стрілка, призначена для відображення кутового положення валу). В синхронних передачах сельсини працюють в індикаторному режимі. В слідкуючих системах сельсини працюють у трансформаторному режимі.
Розрізняють два типи систем: • синхронні індукційні передачі; • системи слідкування. Перші застосовуються у тих випадках, коли гальмівний момент на прийомному валу не перевищує 0. 0015 Нм (наприклад, індикаторна стрілка, призначена для відображення кутового положення валу). В синхронних передачах сельсини працюють в індикаторному режимі. В слідкуючих системах сельсини працюють у трансформаторному режимі.
.") Сельсини здебільшого мають: • однофазну первинну обмотку; • трифазну вторинну обмотку (обмотка синхронізації ). У так званих диференціальних сельсинів первинна і вторинна обмотки трифазні.
Сельсини здебільшого мають: • однофазну первинну обмотку; • трифазну вторинну обмотку (обмотка синхронізації ). У так званих диференціальних сельсинів первинна і вторинна обмотки трифазні.
 може") Сельсини бувають контактні і безконтактні. У контактних сельсинів однофазна обмотка (обмотка збудження) може бути розміщена як на роторі, так і на статорі.
Сельсини бувають контактні і безконтактні. У контактних сельсинів однофазна обмотка (обмотка збудження) може бути розміщена як на роторі, так і на статорі.
 де Em - максимальне діюче значення е. р. с. в обмотці при збігу її осі з віссю обмотки збудження.
де Em - максимальне діюче значення е. р. с. в обмотці при збігу її осі з віссю обмотки збудження.
 2. Робота сельсинів у трансформаторному режимі . Сельсини в слідкуючих системах застосовуються для вимірювання кута неузгодженості між задаючим і приймаючим валами і перетворення його в напругу змінного струму. Величина вихідної напруги сельсинатрансформатора при малих кутах неузгодженості пропорційна величині цього кута, а фаза визначається його знаком: зі зміною кута неузгодженості фаза вихідної напруги змінюються на 180 градусів.
2. Робота сельсинів у трансформаторному режимі . Сельсини в слідкуючих системах застосовуються для вимірювання кута неузгодженості між задаючим і приймаючим валами і перетворення його в напругу змінного струму. Величина вихідної напруги сельсинатрансформатора при малих кутах неузгодженості пропорційна величині цього кута, а фаза визначається його знаком: зі зміною кута неузгодженості фаза вихідної напруги змінюються на 180 градусів.
 Різницю ‑ =Θ називають кутом неузгодженості
Різницю ‑ =Θ називають кутом неузгодженості
 Фpm - результуючий магнітний потік; Em - максимальна е. р. с; C - коефіцієнт пропорційності.
Фpm - результуючий магнітний потік; Em - максимальна е. р. с; C - коефіцієнт пропорційності.
 На практиці зручніше, щоб при відсутності помилки напруга Есст =0. Тому узгодженим положенням між сельсинами вважають таке положення, при якому їх статори (ротори) зсунуті на 90º. Оскільки кут неузгодженості відраховується від положення, при якому статор і ротор зсунуті на 90º, то для напруги, що знімається з однофазної обмотки, справедлива залежність:
На практиці зручніше, щоб при відсутності помилки напруга Есст =0. Тому узгодженим положенням між сельсинами вважають таке положення, при якому їх статори (ротори) зсунуті на 90º. Оскільки кут неузгодженості відраховується від положення, при якому статор і ротор зсунуті на 90º, то для напруги, що знімається з однофазної обмотки, справедлива залежність:
 3. Функціональна схема та особливості побудови ССП у КЗА 86 Ж 6 Синхронно-слідкуючим приводом (ССП) називається сельсина система, що працює у трансформаторному режимі, котра при високій точності стеження дозволяє отримати значну потужність на валу, що синхронізується.
3. Функціональна схема та особливості побудови ССП у КЗА 86 Ж 6 Синхронно-слідкуючим приводом (ССП) називається сельсина система, що працює у трансформаторному режимі, котра при високій точності стеження дозволяє отримати значну потужність на валу, що синхронізується.
 Галузь застосування ССП широко застосовуються в АСУ військ ППО, зокрема: - для забезпечення обертання кругової розгортки на індикаторах синхронно і синфазно з обертанням приймальн-передавальноої кабіни (ППК) РЛС; - для дистанційного управління поворотом антени ПРВ на заданий кут.
Галузь застосування ССП широко застосовуються в АСУ військ ППО, зокрема: - для забезпечення обертання кругової розгортки на індикаторах синхронно і синфазно з обертанням приймальн-передавальноої кабіни (ППК) РЛС; - для дистанційного управління поворотом антени ПРВ на заданий кут.
 Вимоги до ССП Сучасні ССП повинні мати такі якості: - високу точність; - стійкість до збуджуючих впливів; - високу швидкодію; - низькі вагово-габаритні характеристики.
Вимоги до ССП Сучасні ССП повинні мати такі якості: - високу точність; - стійкість до збуджуючих впливів; - високу швидкодію; - низькі вагово-габаритні характеристики.
 Склад ССП: - сельсина пара, яка працює у трансформаторному режимі; - підсилювач потужності; - виконуючий двигун; - редуктор.
Склад ССП: - сельсина пара, яка працює у трансформаторному режимі; - підсилювач потужності; - виконуючий двигун; - редуктор.
 При повороті ротора Рсд в інший бік фаза напруги Рст змінюється на протилежну і, відповідно, протилежним стає напрямок обертання двигуна. Статична характеристика сельсинної системи показує, що протягом періоду обертання двічі проходить через нуль - при ‑ рівному 0° і 180°. Однак, поведінка слідкуючої системи у цих двох випадках не буде однаковою. Динамічна помилка близько 2 В Поріг зрушення Точка синусоїди при ‑ = 0 називається стійким нулем, а точка при ‑ = 180 називається нестійким нулем (помилковим).
При повороті ротора Рсд в інший бік фаза напруги Рст змінюється на протилежну і, відповідно, протилежним стає напрямок обертання двигуна. Статична характеристика сельсинної системи показує, що протягом періоду обертання двічі проходить через нуль - при ‑ рівному 0° і 180°. Однак, поведінка слідкуючої системи у цих двох випадках не буде однаковою. Динамічна помилка близько 2 В Поріг зрушення Точка синусоїди при ‑ = 0 називається стійким нулем, а точка при ‑ = 180 називається нестійким нулем (помилковим).
 Для підвищення точності ССП застосовують різні методи, зокрема, використовують двоканальні ССП. Відмінність двоканального ССП від одноканального полягає в тому, що вводиться додатковий канал, який з'єднаний з відповідними СД і СТ за допомогою редукторів, що мають коефіцієнт редукції 1: 23 чи 1: 36.
Для підвищення точності ССП застосовують різні методи, зокрема, використовують двоканальні ССП. Відмінність двоканального ССП від одноканального полягає в тому, що вводиться додатковий канал, який з'єднаний з відповідними СД і СТ за допомогою редукторів, що мають коефіцієнт редукції 1: 23 чи 1: 36.
 відносяться до класу дискретних систем автоматичного управління.") ССП сучасних КЗА (86 Ж 6) відносяться до класу дискретних систем автоматичного управління. Цифрові ССП мають ряд переваг порівняно з неперервними: 1. Висока точність; 2. Підвищена стійкість до флуктуацій вхідних впливів; 3. Можливість віддаляти на значні відстані виконавчу систему від системи управління; 4. Програмованістю виду керуючого впливу від зміни величини, що вимірюється. Сигналами, що передаються лініями синхроннослідкуючого зв'язку, в цифрових ССП є: - масштабні азимутальні імпульси (МАІ) (4096, тобто значення ваги молодшого розряду 5, 27 хв. ); - позначка "Північ" (ПП).
ССП сучасних КЗА (86 Ж 6) відносяться до класу дискретних систем автоматичного управління. Цифрові ССП мають ряд переваг порівняно з неперервними: 1. Висока точність; 2. Підвищена стійкість до флуктуацій вхідних впливів; 3. Можливість віддаляти на значні відстані виконавчу систему від системи управління; 4. Програмованістю виду керуючого впливу від зміни величини, що вимірюється. Сигналами, що передаються лініями синхроннослідкуючого зв'язку, в цифрових ССП є: - масштабні азимутальні імпульси (МАІ) (4096, тобто значення ваги молодшого розряду 5, 27 хв. ); - позначка "Північ" (ПП).
 Аналогова система ССП використовується на РЛС старого парку: П-37, 5 У 75, 5 Н 84 А, П-19, всіх видах ПРВ і т. д. . РЛС 55 Ж 6, 19 Ж 6, 22 Ж 6 мають цифрову систему ССП і видають на КЗА сигнали МАІ і ПП.
Аналогова система ССП використовується на РЛС старого парку: П-37, 5 У 75, 5 Н 84 А, П-19, всіх видах ПРВ і т. д. . РЛС 55 Ж 6, 19 Ж 6, 22 Ж 6 мають цифрову систему ССП і видають на КЗА сигнали МАІ і ПП.
 Синхронно-слідкуючі приводи АПУ 86 Ж 6 дозволяють: - синхронізувати і фазувати кругову розгортку індикатора будь-якого з робочих місць АПУ 86 Ж 6 з одним із чотирьох радіодальномірів з точністю 5, 27 кутових хвилин; - встановлювати антени двох РВ по заданому азимуту з точністю 10 хв.
Синхронно-слідкуючі приводи АПУ 86 Ж 6 дозволяють: - синхронізувати і фазувати кругову розгортку індикатора будь-якого з робочих місць АПУ 86 Ж 6 з одним із чотирьох радіодальномірів з точністю 5, 27 кутових хвилин; - встановлювати антени двох РВ по заданому азимуту з точністю 10 хв.
 Стійка УУВ Стійка УС
Стійка УУВ Стійка УС
 Блок БЦСС-60
Блок БЦСС-60
 Блок БПВ- У
Блок БПВ- У