02_Основы ТАР.ppt
- Количество слайдов: 26
 Основы теории автоматического регулирования 1. КЛАССИФИКАЦИЯ САР 2. СТРУКТУРНАЯ СХЕМА САР 3. ФУНКЦИОНАЛЬНЫЕ И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ САР 4. ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ САР Управление, при котором автоматически поддерживается в заданных пределах одна величина, определяющая функционирование ОУ, называется автоматическим регулированием
Основы теории автоматического регулирования 1. КЛАССИФИКАЦИЯ САР 2. СТРУКТУРНАЯ СХЕМА САР 3. ФУНКЦИОНАЛЬНЫЕ И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ САР 4. ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ САР Управление, при котором автоматически поддерживается в заданных пределах одна величина, определяющая функционирование ОУ, называется автоматическим регулированием
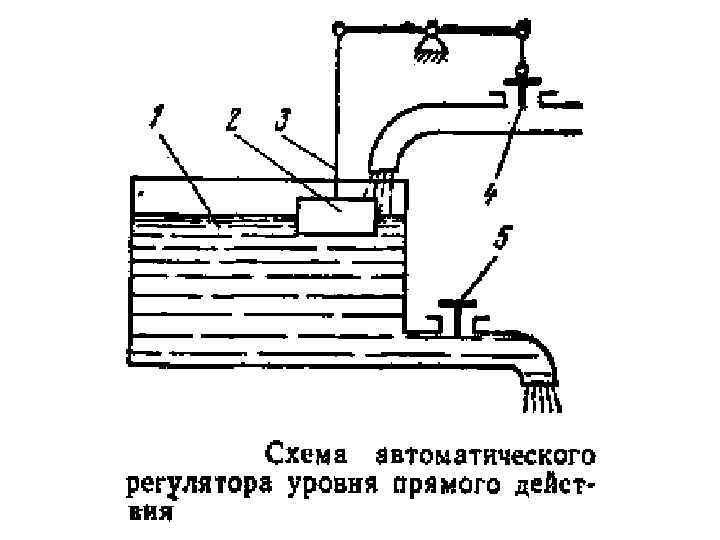
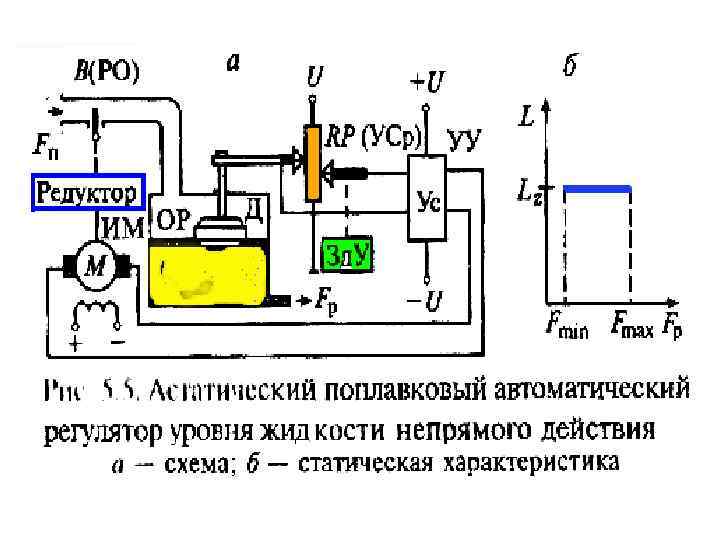
 КЛАССИФИКАЦИЯ САР Системы автоматического регулирования и регуляторы можно классифицировать по ряду признаков: По назначению или виду регулируемой величины регуляторы давления, температуры, уровня и т. д. По числу входных величин - однопараметрические и многопараметрические (многомерные), а по числу контуров регулирования — одноконтурные и многоконтурные, которые, в свою очередь, могут быть связанного и несвязанного регулирования. По способу действия или использованию дополнительного источника энергии различают регуляторы прямого и непрямого действия. В регуляторах прямого действия управление регулирующим органом осуществляется за счет энергии, поступающей из объекта регулирования, а регуляторы непрямого действия требуют для своей работы дополнительного источника энергии.
КЛАССИФИКАЦИЯ САР Системы автоматического регулирования и регуляторы можно классифицировать по ряду признаков: По назначению или виду регулируемой величины регуляторы давления, температуры, уровня и т. д. По числу входных величин - однопараметрические и многопараметрические (многомерные), а по числу контуров регулирования — одноконтурные и многоконтурные, которые, в свою очередь, могут быть связанного и несвязанного регулирования. По способу действия или использованию дополнительного источника энергии различают регуляторы прямого и непрямого действия. В регуляторах прямого действия управление регулирующим органом осуществляется за счет энергии, поступающей из объекта регулирования, а регуляторы непрямого действия требуют для своей работы дополнительного источника энергии.
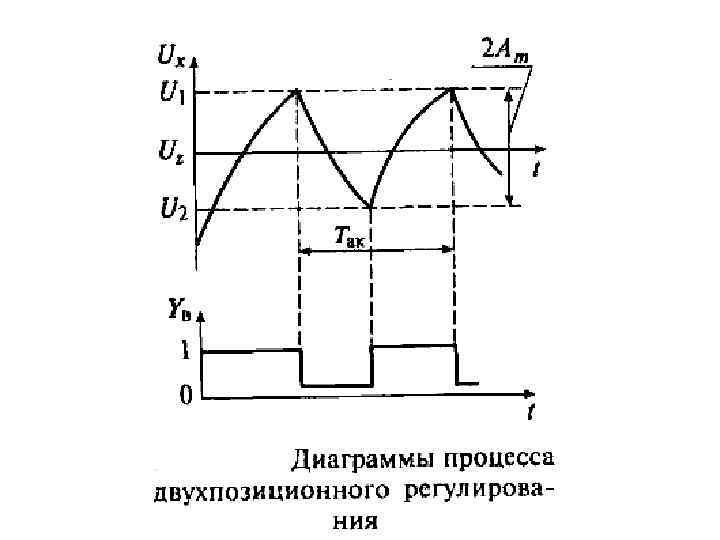
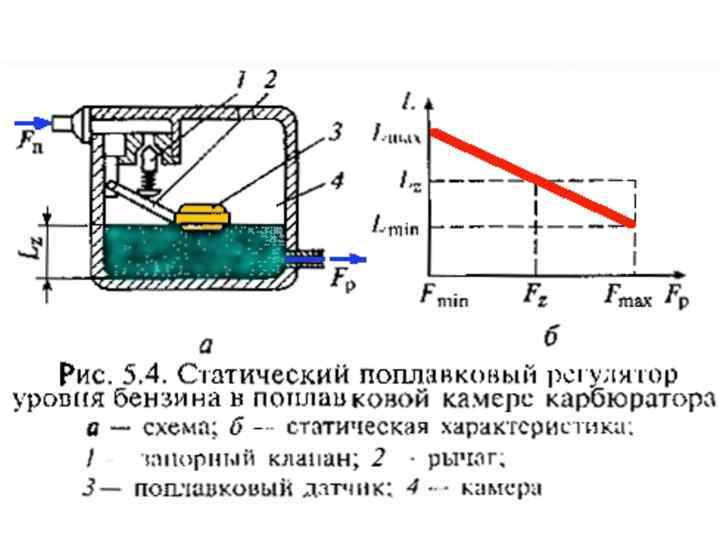
 По роду дополнительной энергии регуляторы подразделяются на электрические, гидравлические, пневматические, механические и др. по требованиям, предъявляемым к поведению регулируемой величины во времени, а следовательно, и по изменению задающего действия системы автоматического регулирования подразделяются на системы стабилизации, программного управления, следящие и адаптивные (приспосабливающиеся). По видам сигналов, используемых в элементах, или по видам воздействия на регулирующее устройство САР подразделяются на системы непрерывного и дискретного (прерывистого) действия. По виду уравнений, описывающих движение системы, САР подразделяются на линейные и нелинейные (релейные) системы регулирования. По свойствам в установившемся режиме регуляторы подразделяется на статические и астатические. В статических регуляторах логическая ошибка (ошибка в установившемся режиме) зависит от возмущающего воздействия (нагрузки), а в астатических — она равна нулю.
По роду дополнительной энергии регуляторы подразделяются на электрические, гидравлические, пневматические, механические и др. по требованиям, предъявляемым к поведению регулируемой величины во времени, а следовательно, и по изменению задающего действия системы автоматического регулирования подразделяются на системы стабилизации, программного управления, следящие и адаптивные (приспосабливающиеся). По видам сигналов, используемых в элементах, или по видам воздействия на регулирующее устройство САР подразделяются на системы непрерывного и дискретного (прерывистого) действия. По виду уравнений, описывающих движение системы, САР подразделяются на линейные и нелинейные (релейные) системы регулирования. По свойствам в установившемся режиме регуляторы подразделяется на статические и астатические. В статических регуляторах логическая ошибка (ошибка в установившемся режиме) зависит от возмущающего воздействия (нагрузки), а в астатических — она равна нулю.
 Объект регулирования Простой, одномерный 1 параметр Сложный, многомерный 1 1 n е ст Со а ны в м ли де о
Объект регулирования Простой, одномерный 1 параметр Сложный, многомерный 1 1 n е ст Со а ны в м ли де о
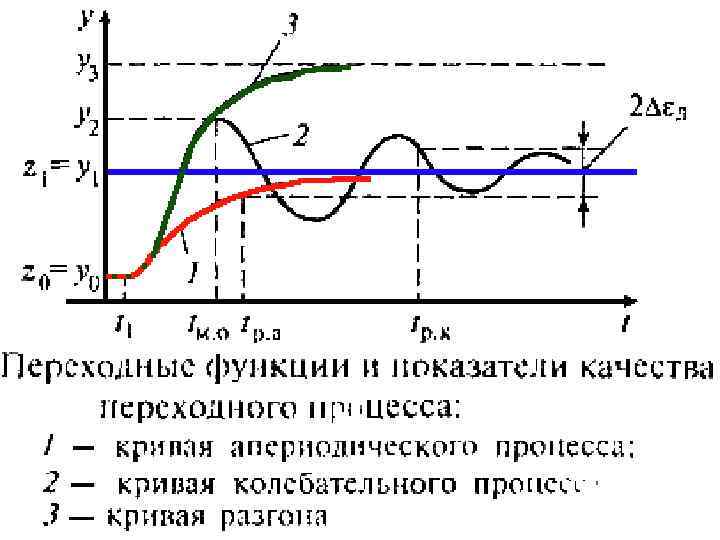
; • Время разгона") Характеристики объектов регулирования • аккумулирующая способность (величина А – коэффициент емкости); • Время разгона – промежуток времени, за который величина меняется от 0 до максимума при возмущении; Физическая величина, определяющая управляющее воздействие на ОР, называется регулирующей величиной
Характеристики объектов регулирования • аккумулирующая способность (величина А – коэффициент емкости); • Время разгона – промежуток времени, за который величина меняется от 0 до максимума при возмущении; Физическая величина, определяющая управляющее воздействие на ОР, называется регулирующей величиной
 • Это реакция объекта на возмущающее действие время запаздывания отрицательно сказывается на качестве регулирования Это инертность системы
• Это реакция объекта на возмущающее действие время запаздывания отрицательно сказывается на качестве регулирования Это инертность системы
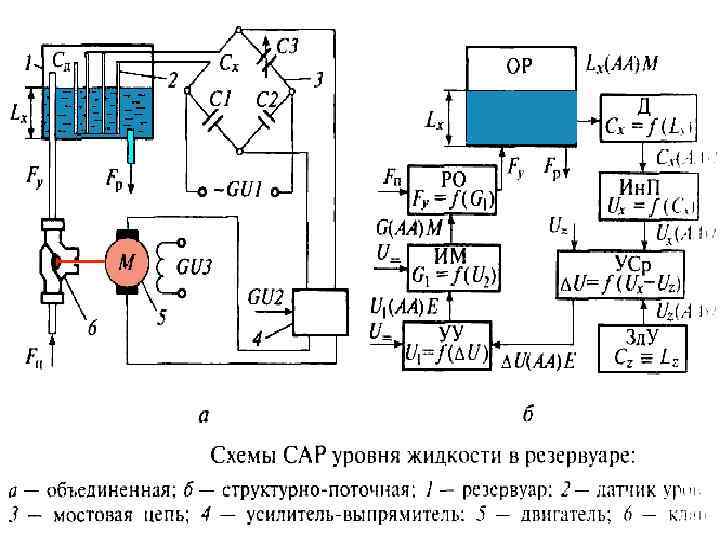
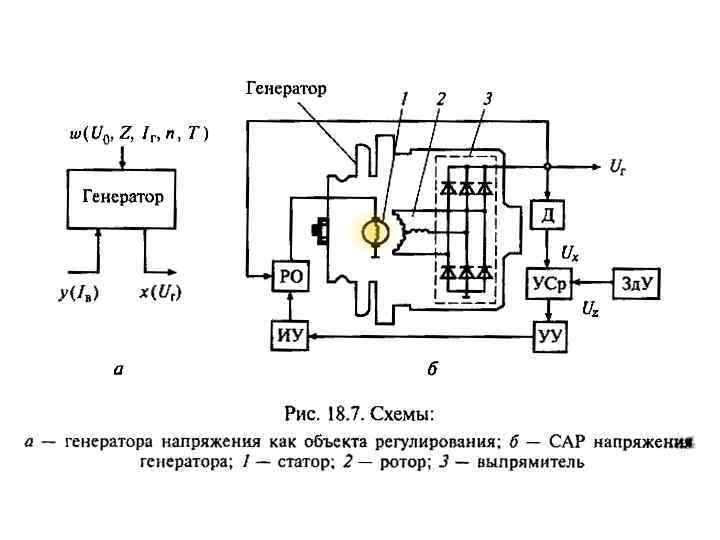
, получающее информацию от объекта регулирования (ОР), 2. датчик (Д),") Сокращения: 1. устройство измерения (УИ), получающее информацию от объекта регулирования (ОР), 2. датчик (Д), непосредственно подключенный к ОР, 3. информационные преобразователи (Ин. П); 4. устройство управления и обработки информации (УУи. ОИ), 5. в качестве которого в САР используют устройство сравнения (УСр) 6. устройство управления (УУ), формирующее команды управления; 7. устройство воздействия (УВ) на объект регулирования, в котором можно выделить исполнительное 8. устройство (ИУ) 9. регулирующее устройство (РУ), непосредственно воздействующее на ОР.
Сокращения: 1. устройство измерения (УИ), получающее информацию от объекта регулирования (ОР), 2. датчик (Д), непосредственно подключенный к ОР, 3. информационные преобразователи (Ин. П); 4. устройство управления и обработки информации (УУи. ОИ), 5. в качестве которого в САР используют устройство сравнения (УСр) 6. устройство управления (УУ), формирующее команды управления; 7. устройство воздействия (УВ) на объект регулирования, в котором можно выделить исполнительное 8. устройство (ИУ) 9. регулирующее устройство (РУ), непосредственно воздействующее на ОР.
 2 СТРУКТУРНАЯ СХЕМА САР
2 СТРУКТУРНАЯ СХЕМА САР
 Саморегулирование самостоятельный переход к прежнему состоянию или к новому равновесному Н Н Lo Lo Н mп=mр без саморегулирования саморегулирование Неустойчивые объекты имеют отрицательное саморегулирование (ОС – положительна), стабилизация идет за счет обратной отрицательной связи Lo Н
Саморегулирование самостоятельный переход к прежнему состоянию или к новому равновесному Н Н Lo Lo Н mп=mр без саморегулирования саморегулирование Неустойчивые объекты имеют отрицательное саморегулирование (ОС – положительна), стабилизация идет за счет обратной отрицательной связи Lo Н
 Понятие устойчивости
Понятие устойчивости
 Главная обратная связь в системе автоматического регулирования всегда должна быть отрицательной (при увеличении регулируемой величины регулирующее воздействие должно изменяться в сторону противодействия возрастанию регулируемого параметра).
Главная обратная связь в системе автоматического регулирования всегда должна быть отрицательной (при увеличении регулируемой величины регулирующее воздействие должно изменяться в сторону противодействия возрастанию регулируемого параметра).
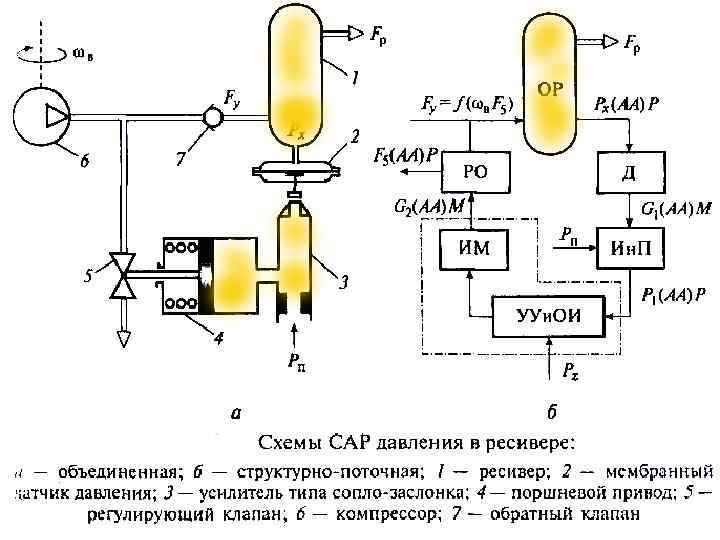
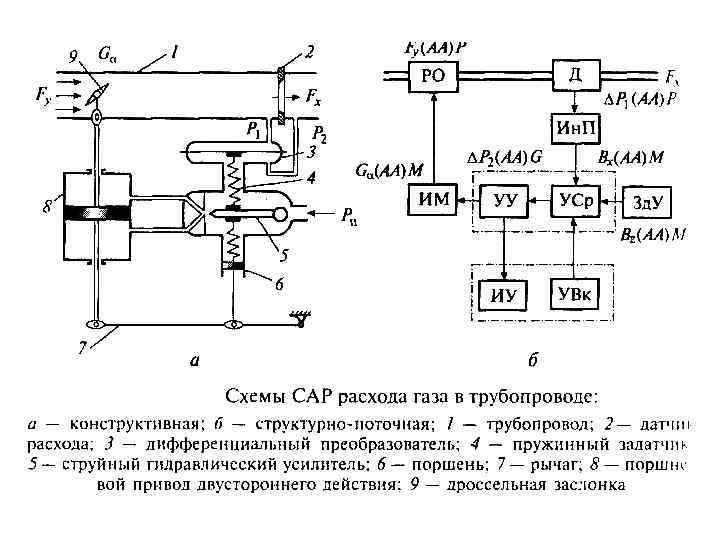
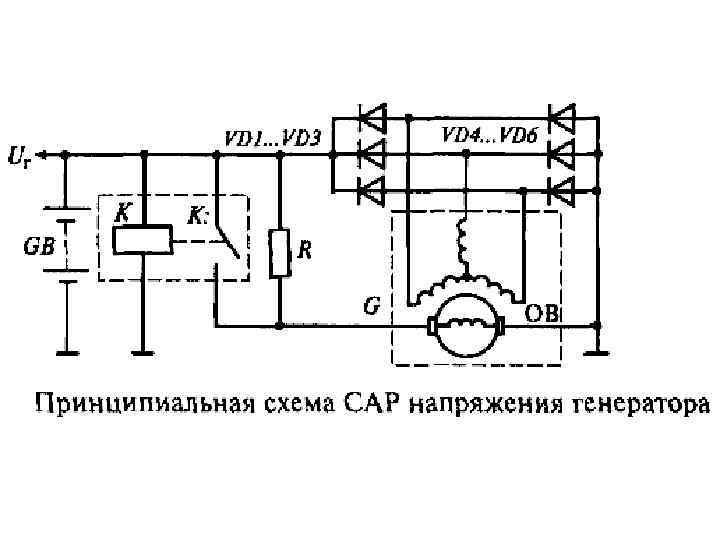
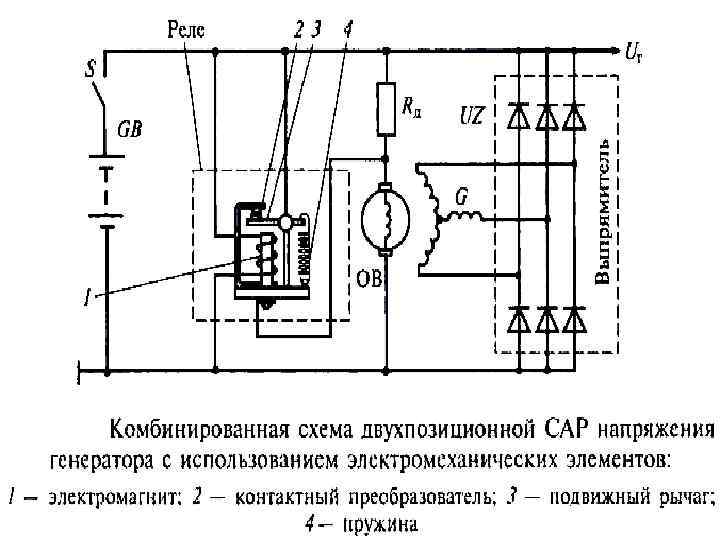
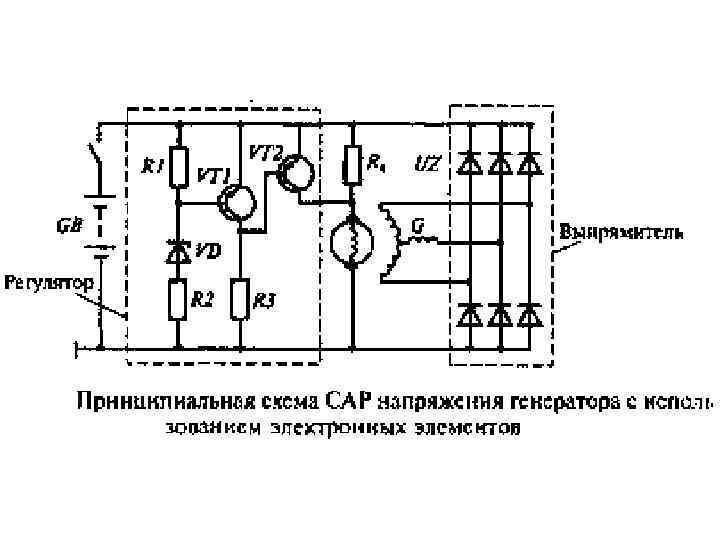
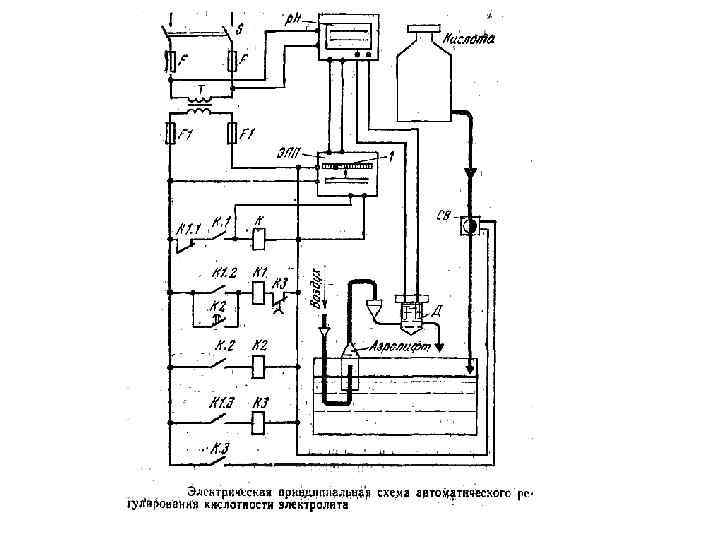
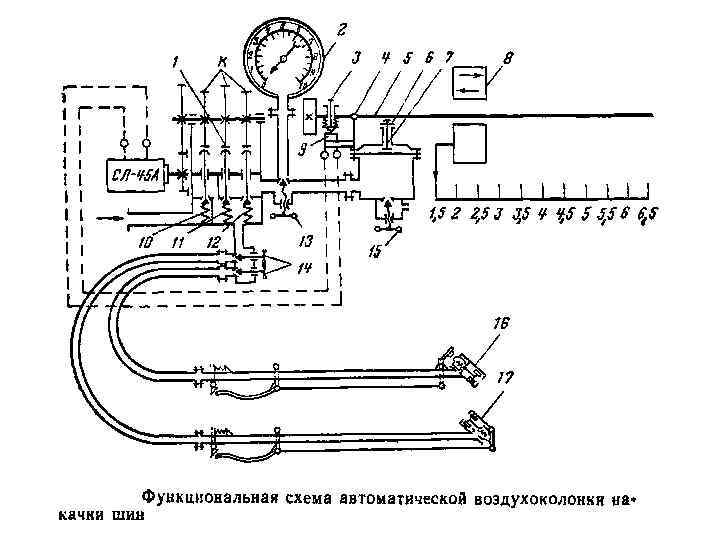
 3 ФУНКЦИОНАЛЬНЫЕ И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ Схема системы автоматического регулирования, представленная функциональными элементами и связями между ними, называется функциональной схемой
3 ФУНКЦИОНАЛЬНЫЕ И ПРИНЦИПИАЛЬНЫЕ СХЕМЫ Схема системы автоматического регулирования, представленная функциональными элементами и связями между ними, называется функциональной схемой