

МЕХАНИКА 2 курс.ppt
- Количество слайдов: 56
 Основы построения и исследования механихмов
Основы построения и исследования механихмов
 Для механической системы элементами могут быть: деталь, звено, группа, узел, простой или типовой механизм.
Для механической системы элементами могут быть: деталь, звено, группа, узел, простой или типовой механизм.
 Деталь элемент конструкции не имеющий в своем составе внутренних связей (состоящий из одного твердого тела). Звено твердое тело или система жестко связанных твердых тел (может состоять из одной или нескольких деталей) входящая в состав механизма. Группа кинематическая цепь, состоящая из подвижных звеньев, связанных между собой кинематическими парами (отношениями), и удовлетворяющая некоторым заданным условиям.
Деталь элемент конструкции не имеющий в своем составе внутренних связей (состоящий из одного твердого тела). Звено твердое тело или система жестко связанных твердых тел (может состоять из одной или нескольких деталей) входящая в состав механизма. Группа кинематическая цепь, состоящая из подвижных звеньев, связанных между собой кинематическими парами (отношениями), и удовлетворяющая некоторым заданным условиям.
 Узел несколько деталей связанных между собой функционально, конструктивно или каким либо другим образом. С точки зрения системы узлы, группы, простые или типовые механизмы рассматриваются как подсистемы. Самым низким уровнем разбиения системы при конструировании является уровень деталей; при проектировании уровень звеньев. Элементы из системы можно выделить только после определения взаимосвязей между ними, которые описываются отношениями. Для механических систем интерес представляют отношения определяющие структуру системы и ее функции, т. е. расположения и связи.
Узел несколько деталей связанных между собой функционально, конструктивно или каким либо другим образом. С точки зрения системы узлы, группы, простые или типовые механизмы рассматриваются как подсистемы. Самым низким уровнем разбиения системы при конструировании является уровень деталей; при проектировании уровень звеньев. Элементы из системы можно выделить только после определения взаимосвязей между ними, которые описываются отношениями. Для механических систем интерес представляют отношения определяющие структуру системы и ее функции, т. е. расположения и связи.
 Расположения такие отношения между элементами, которые описывают их геометрические относительные положения. Связи отношения между элементами, предназначенные для передачи материала, энергии или информации между элементами. Связи могут осуществляться с помощью различных физических средств: механических соединений, жидкостей, электромагнитных или других полей, упругих элементов. Механические соединения могут быть подвижными (кинематические пары) и неподвижными. Неподвижные соединения делятся на разъемные (винтовые, штифтовые) и неразъемные (сварные, клеевые).
Расположения такие отношения между элементами, которые описывают их геометрические относительные положения. Связи отношения между элементами, предназначенные для передачи материала, энергии или информации между элементами. Связи могут осуществляться с помощью различных физических средств: механических соединений, жидкостей, электромагнитных или других полей, упругих элементов. Механические соединения могут быть подвижными (кинематические пары) и неподвижными. Неподвижные соединения делятся на разъемные (винтовые, штифтовые) и неразъемные (сварные, клеевые).
 Машины и их классификация. По мере развития машин содержание термина "машина" изменялось. Для современных машин дадим следующее определение: машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. Условно все машины можно разделить на технологические, транспортные, энергетические, информационные. С помощью технологических машин (например, металлообрабатывающие станки, землеройные машины и т. д. ) происходит изменение форм, размеров, свойств, состояния исходных материалов и заготовок, подвергшихся воздействию рабочего (исполнительного) органа машины. С помощью транспортных машин происходит перемещение грузов по заданной траектории с требуемыми скоростью или ускорением. В энергетических машинах происходит преобразование энергии (например, электрической в механическую – в станках с электроприводом, тепловой в механическую – в тракторах и автомобилях с двигателями внутреннего сгорания и т. д. ). В информационных машинах происходит преобразование вводимой информации для контроля, регулирования режима работы машины и управления движением.
Машины и их классификация. По мере развития машин содержание термина "машина" изменялось. Для современных машин дадим следующее определение: машина есть устройство, создаваемое человеком для преобразования энергии, материалов и информации с целью облегчения физического и умственного труда, увеличения его производительности и частичной или полной замены человека в его трудовых и физиологических функциях. Условно все машины можно разделить на технологические, транспортные, энергетические, информационные. С помощью технологических машин (например, металлообрабатывающие станки, землеройные машины и т. д. ) происходит изменение форм, размеров, свойств, состояния исходных материалов и заготовок, подвергшихся воздействию рабочего (исполнительного) органа машины. С помощью транспортных машин происходит перемещение грузов по заданной траектории с требуемыми скоростью или ускорением. В энергетических машинах происходит преобразование энергии (например, электрической в механическую – в станках с электроприводом, тепловой в механическую – в тракторах и автомобилях с двигателями внутреннего сгорания и т. д. ). В информационных машинах происходит преобразование вводимой информации для контроля, регулирования режима работы машины и управления движением.
 Машина в общем виде состоит из основных частей: машина двигатель, передаточный механизм, исполнительное устройство (механизм) и система управления. Такую машину называют механическим приводом. Машина двигатель преобразует какой либо вид энергии в механическую (электродвигатель, двигатель внутреннего сгорания, гидромотор и т. д. ). Передаточный механизм преобразует движение (например, кулачковый, зубчатый, рычажный механизмы). Исполнительный механизм непосредственно обеспечивает выполнение технологического процесса, для которого предназначен механический привод.
Машина в общем виде состоит из основных частей: машина двигатель, передаточный механизм, исполнительное устройство (механизм) и система управления. Такую машину называют механическим приводом. Машина двигатель преобразует какой либо вид энергии в механическую (электродвигатель, двигатель внутреннего сгорания, гидромотор и т. д. ). Передаточный механизм преобразует движение (например, кулачковый, зубчатый, рычажный механизмы). Исполнительный механизм непосредственно обеспечивает выполнение технологического процесса, для которого предназначен механический привод.
 В некоторых машинах передаточный механизм отсутствует (например, вентилятор, состоящий из электродвигателя с насаженной на вал крыльчаткой).
В некоторых машинах передаточный механизм отсутствует (например, вентилятор, состоящий из электродвигателя с насаженной на вал крыльчаткой).
 Энергетические машины преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей: Двигатели (рис. ), которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
Энергетические машины преобразующие энергию одного вида в энергию другого вида. Эти машины бывают двух разновидностей: Двигатели (рис. ), которые преобразуют любой вид энергии в механическую (например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего сгорания преобразуют энергию расширения газов при сгорании в цилиндре).
, которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор") Генераторы (рис. ), которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую).
Генераторы (рис. ), которые преобразуют механическую энергию в энергию другого вида (например, электрогенератор преобразует механическую энергию паровой или гидравлической турбины в электрическую).
 Механизм и его элементы. Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
Механизм и его элементы. Механизмом называется система, состоящая из звеньев и кинематических пар, образующих замкнутые или разомкнутые цепи, которая предназначена для передачи и преобразования перемещений входных звеньев и приложенных к ним сил в требуемые перемещения и силы на выходных звеньях.
 Основным признаком механизма является преобразование механического движения. Механизм входит в состав многих машин, т. к. для преобразования энергии, материалов и информации требуется обычно преобразование движения получаемого от двигателя. Нельзя отождествлять понятия "машина" и "механизм". Во первых, кроме механизмов в машине всегда имеются дополни тельные устройства, связанные с управлением механизмами. Во вторых, есть машины, в которых нет механизмов. Например, в последние годы созданы тех нологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро или гидродвигателя.
Основным признаком механизма является преобразование механического движения. Механизм входит в состав многих машин, т. к. для преобразования энергии, материалов и информации требуется обычно преобразование движения получаемого от двигателя. Нельзя отождествлять понятия "машина" и "механизм". Во первых, кроме механизмов в машине всегда имеются дополни тельные устройства, связанные с управлением механизмами. Во вторых, есть машины, в которых нет механизмов. Например, в последние годы созданы тех нологические машины, в которых каждый исполнительный орган приводится в движение от индивидуального электро или гидродвигателя.
 При описании механизмов, они были разделены на отдельные группы по признаку их конструктивного оформления (рычажные, кулачковые, фрикцион ные, зубчатые и др. ) Механизмы образуются последовательным присоединениям звеньев к начальному механизму. Деталь – это изделие, изготовленное без сборочных операций. Звено – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое.
При описании механизмов, они были разделены на отдельные группы по признаку их конструктивного оформления (рычажные, кулачковые, фрикцион ные, зубчатые и др. ) Механизмы образуются последовательным присоединениям звеньев к начальному механизму. Деталь – это изделие, изготовленное без сборочных операций. Звено – одна или несколько неподвижно соединенных друг с другом деталей, входящих в механизм и движущихся, как одно целое.
") Выполнение звеньев из нескольких деталей обеспечивается соединением. их Различают соединения неразъемные (сварные, заклепочные, клеевые) и разъемные (шпоночные, шлицевые, резьбовые). Звенья в зависимости от вида их материала могут быть твердые и гибкие (упругие), например, ремень. Жидкости и газы в гидро и пневмомеханизмах звеньями не считаются.
Выполнение звеньев из нескольких деталей обеспечивается соединением. их Различают соединения неразъемные (сварные, заклепочные, клеевые) и разъемные (шпоночные, шлицевые, резьбовые). Звенья в зависимости от вида их материала могут быть твердые и гибкие (упругие), например, ремень. Жидкости и газы в гидро и пневмомеханизмах звеньями не считаются.
 Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рис. На кинематических схемах звенья обозначаются арабскими цифрами: 0, 1, 2 и т. д. (см. рис. ).
Условное изображение звеньев на кинематических схемах механизмов регламентируется ГОСТом. Примеры изображения некоторых звеньев приведены на рис. На кинематических схемах звенья обозначаются арабскими цифрами: 0, 1, 2 и т. д. (см. рис. ).
 Кинематическая пара подвижное соединение двух звеньев, допускающее их определенное относительное движение. Кинематическая цепь система звеньев, образующих между собой кинематические пары. Кинематические цепи бывают пространственными и плоскими. Пространственные кинематические цепи – цепи, звенья которых двигаются в различных плоскостях. Плоские кинематические цепи – цепи, звенья которых двигаются в одной или параллельных плоскостях.
Кинематическая пара подвижное соединение двух звеньев, допускающее их определенное относительное движение. Кинематическая цепь система звеньев, образующих между собой кинематические пары. Кинематические цепи бывают пространственными и плоскими. Пространственные кинематические цепи – цепи, звенья которых двигаются в различных плоскостях. Плоские кинематические цепи – цепи, звенья которых двигаются в одной или параллельных плоскостях.
 Стойка звено, которое при исследовании механизма принимается за неподвижное. Число степеней свободы или подвижность механизма число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве. Таким образом, каждый механизм имеет стойку и подвижные звенья, среди которых выделяют входные, выходные и промежуточные звенья.
Стойка звено, которое при исследовании механизма принимается за неподвижное. Число степеней свободы или подвижность механизма число независимых обобщенных координат однозначно определяющее положение всех его звеньев на плоскости или в пространстве. Таким образом, каждый механизм имеет стойку и подвижные звенья, среди которых выделяют входные, выходные и промежуточные звенья.
 Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. Обычно в механизме имеется одно входное и выходное звено. Но в некоторых случаях имеют место механизмы с несколькими входными или выходными звеньями, например, дифференциал автомобиля. Отличительным признаком входного звена является то, что элементарная работа приложенных к ним сил положительна (работа силы считается положительной, если направление действия силы совпадает с направлением движения точки её приложения или под острым углом к ней). Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма. Элементарная работа приложенных к выходному звену сил является отрицательной (работа силы считается отрицательной, если направление действия силы противоположно направлению движения точки её приложения).
Входное звено – звено, которому сообщается движение, преобразуемое механизмом в требуемые движения других звеньев. Входное звено соединено с двигателем либо с выходным звеном другого механизма. Обычно в механизме имеется одно входное и выходное звено. Но в некоторых случаях имеют место механизмы с несколькими входными или выходными звеньями, например, дифференциал автомобиля. Отличительным признаком входного звена является то, что элементарная работа приложенных к ним сил положительна (работа силы считается положительной, если направление действия силы совпадает с направлением движения точки её приложения или под острым углом к ней). Выходное звено – звено, совершающее движение, для выполнения которого предназначен механизм. Выходное звено соединено с исполнительным устройством (рабочим органом, указателем прибора), либо со входным звеном другого механизма. Элементарная работа приложенных к выходному звену сил является отрицательной (работа силы считается отрицательной, если направление действия силы противоположно направлению движения точки её приложения).
 Начальное звено, координата которого принята за обобщенную. Начальная кинематическая пара, относительное положение звеньев в которой принято за обобщенную координату. Звенья соединяются друг с другом подвижно посредством кинематических пар: вращательных (шарнир) и поступательных (ползун). Траектория движения точки (звена) – линия перемещения точки в плоскости. Это может быть прямая линия или кривая.
Начальное звено, координата которого принята за обобщенную. Начальная кинематическая пара, относительное положение звеньев в которой принято за обобщенную координату. Звенья соединяются друг с другом подвижно посредством кинематических пар: вращательных (шарнир) и поступательных (ползун). Траектория движения точки (звена) – линия перемещения точки в плоскости. Это может быть прямая линия или кривая.
 Классификация механизмов. Механизмы классифицируются по следующим признакам: 1. По области применения и функциональному назначению: механизмы летательных аппаратов; механизмы станков; механизмы кузнечных машин и прессов; механизмы двигателей внутреннего сгорания; механизмы промышленных роботов (манипуляторы); механизмы компрессоров; механизмы насосов и т. д.
Классификация механизмов. Механизмы классифицируются по следующим признакам: 1. По области применения и функциональному назначению: механизмы летательных аппаратов; механизмы станков; механизмы кузнечных машин и прессов; механизмы двигателей внутреннего сгорания; механизмы промышленных роботов (манипуляторы); механизмы компрессоров; механизмы насосов и т. д.
 2. по виду передаточной функции на механизмы: с постоянной передаточной функцией; с переменной передаточной функцией: с нерегулируемой (синусные, тангенсные); с регулируемой: со ступенчатым регулированием (коробки передач); с бесступенчатым регулированием (вариаторы).
2. по виду передаточной функции на механизмы: с постоянной передаточной функцией; с переменной передаточной функцией: с нерегулируемой (синусные, тангенсные); с регулируемой: со ступенчатым регулированием (коробки передач); с бесступенчатым регулированием (вариаторы).
 3. по виду преобразования движения на механизмы преобразующие : вращательное во вращательное: редукторы ; мультипликаторы ; муфты ; вращательное в поступательное; поступательное во вращательное; поступательное в поступательное.
3. по виду преобразования движения на механизмы преобразующие : вращательное во вращательное: редукторы ; мультипликаторы ; муфты ; вращательное в поступательное; поступательное во вращательное; поступательное в поступательное.
 4. по движению и расположению звеньев в пространстве: пространственные; плоские; сферические. Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой либо одной сфере, являются одновременно и сферическими.
4. по движению и расположению звеньев в пространстве: пространственные; плоские; сферические. Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой либо одной сфере, являются одновременно и сферическими.
 5. по изменяемости структуры механизма на механизмы: с неизменяемой структурой; с изменяемой структурой. В процессе работы кривошипно ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться (рис. ). Так если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь стойка.
5. по изменяемости структуры механизма на механизмы: с неизменяемой структурой; с изменяемой структурой. В процессе работы кривошипно ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться (рис. ). Так если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь стойка.
 6. по числу подвижностей механизма: с одной подвижностью W=1; с несколькими подвижностями W>1: суммирующие (интегральные); разделяющие (дифференциальные). 7. по виду кинематических пар (КП): с низшими КП (все КП механизма низшие); с высшими КП (хотя бы одна КП высшая); шарнирные (все КП механизма вращательные шарниры).
6. по числу подвижностей механизма: с одной подвижностью W=1; с несколькими подвижностями W>1: суммирующие (интегральные); разделяющие (дифференциальные). 7. по виду кинематических пар (КП): с низшими КП (все КП механизма низшие); с высшими КП (хотя бы одна КП высшая); шарнирные (все КП механизма вращательные шарниры).
; зацеплением; волновые (создание") 8. по способу передачи и преобразования потока энергии: фрикционные (сцепления); зацеплением; волновые (создание волновой деформации); импульсные. 9. по форме, конструктивному исполнению и движению звеньев: рычажные (рис. 1. 14); зубчатые (рис. 1. 15); кулачковые (рис. 1. 16); планетарные (рис. 1. 17); манипуляторы (рис. 1. 11 1. 12).
8. по способу передачи и преобразования потока энергии: фрикционные (сцепления); зацеплением; волновые (создание волновой деформации); импульсные. 9. по форме, конструктивному исполнению и движению звеньев: рычажные (рис. 1. 14); зубчатые (рис. 1. 15); кулачковые (рис. 1. 16); планетарные (рис. 1. 17); манипуляторы (рис. 1. 11 1. 12).
 Рычажные механизмы. Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинема тическими парами. Простейшим рычажным механизмом является двухзвенный механизм, состоящий из неподвижного звена стойки 2 (рис. ) и подвижного рычага 1, имеющего возможность вращаться вокруг неподвижной оси (обычно это начальный механизм). Двухзвенный рычажный механизм
Рычажные механизмы. Рычажными механизмами называют механизмы, в которые входят жесткие звенья, соединенные между собой вращательными и поступательными кинема тическими парами. Простейшим рычажным механизмом является двухзвенный механизм, состоящий из неподвижного звена стойки 2 (рис. ) и подвижного рычага 1, имеющего возможность вращаться вокруг неподвижной оси (обычно это начальный механизм). Двухзвенный рычажный механизм
 К двухзвенным рычажным механизмам относятся механизмы многих ро тационных машин: электромоторов, лопастных турбин и вентиляторов. Меха низмы всех этих машин состоят из стойки и вращающегося в неподвижных подшипниках звена (ротора). Более сложными рычажными механизмами являются механизмы, состоя щие из четырех звеньев, так называемые четырехзвенные механизмы.
К двухзвенным рычажным механизмам относятся механизмы многих ро тационных машин: электромоторов, лопастных турбин и вентиляторов. Меха низмы всех этих машин состоят из стойки и вращающегося в неподвижных подшипниках звена (ротора). Более сложными рычажными механизмами являются механизмы, состоя щие из четырех звеньев, так называемые четырехзвенные механизмы.
 На рис. показан механизм шарнирного четырехзвенника, состоящего из трех подвижных звеньев 1, 2, 3 и одного неподвижного звена 4. Звено 1, со единенное о стойкой, может совершать полный с оборот и носит название кри вошипа. Такой шарнирный четырехзвенник, имеющий в своем составе один кривошип и одно коромысло называется кривошипно коромысловым меха низмом, где вращательное движение кривошипа посредством шатуна преобразуется в качательное движение коромысла. Если кривошип и шатун вытянуты в одну линию, то коромысло займет крайнее правое положение, а при наложении друг на друга – левое.
На рис. показан механизм шарнирного четырехзвенника, состоящего из трех подвижных звеньев 1, 2, 3 и одного неподвижного звена 4. Звено 1, со единенное о стойкой, может совершать полный с оборот и носит название кри вошипа. Такой шарнирный четырехзвенник, имеющий в своем составе один кривошип и одно коромысло называется кривошипно коромысловым меха низмом, где вращательное движение кривошипа посредством шатуна преобразуется в качательное движение коромысла. Если кривошип и шатун вытянуты в одну линию, то коромысло займет крайнее правое положение, а при наложении друг на друга – левое.
 механизмов") Закон Ассура: Всякий механизм представляет собою совокупность одного или нескольких, двухзвенных (первичных) механизмов и одной или нескольких групп нулевой подвижности.
Закон Ассура: Всякий механизм представляет собою совокупность одного или нескольких, двухзвенных (первичных) механизмов и одной или нескольких групп нулевой подвижности.
 Группы нулевой подвижности не изменяют числа степеней подвижности двухзвенных механизмов. В связи с этим сформулированный закон позволяет без помощи структурной формулы определить число степеней подвижности любого механизма. Закон Асура является первостепенно важным для решения задач моделирования пространственных механизмов. Этот закон даёт простой алгоритм решения задачи синтеза произвольного механизма и методику анализа имеющегося механизма
Группы нулевой подвижности не изменяют числа степеней подвижности двухзвенных механизмов. В связи с этим сформулированный закон позволяет без помощи структурной формулы определить число степеней подвижности любого механизма. Закон Асура является первостепенно важным для решения задач моделирования пространственных механизмов. Этот закон даёт простой алгоритм решения задачи синтеза произвольного механизма и методику анализа имеющегося механизма
 механизм состоит из подвижного звена и стойки, образующих обратимую пару.") Двухзвенный (первичный) механизм состоит из подвижного звена и стойки, образующих обратимую пару.
Двухзвенный (первичный) механизм состоит из подвижного звена и стойки, образующих обратимую пару.
 широко применяются в технике,") Двухзвенные простейшие механизмы (т. е. механизмы, имеющие пару пятого класса) широко применяются в технике, например, в турбинах, электродвигателях, генераторах, воздуходувках и т. п. Как следует из сформулированного закона Ассура, двухзвенный механизм представляет собою основу многозвенного механизма. Если двухзвенный механизм является простейшим, то в этом случае подвижное звено является входным звеном образуемого механизма. Очевидно, одна и та же стойка может одновременно входить в состав нескольких таких двухзвенных, не зависящих друг от друга механизмов. Подвижные звенья этих механизмов представляют собою не что иное, как начальные звенья, причем каждое из них всегда будет иметь одну степень подвижности.
Двухзвенные простейшие механизмы (т. е. механизмы, имеющие пару пятого класса) широко применяются в технике, например, в турбинах, электродвигателях, генераторах, воздуходувках и т. п. Как следует из сформулированного закона Ассура, двухзвенный механизм представляет собою основу многозвенного механизма. Если двухзвенный механизм является простейшим, то в этом случае подвижное звено является входным звеном образуемого механизма. Очевидно, одна и та же стойка может одновременно входить в состав нескольких таких двухзвенных, не зависящих друг от друга механизмов. Подвижные звенья этих механизмов представляют собою не что иное, как начальные звенья, причем каждое из них всегда будет иметь одну степень подвижности.
 называется кинематическая цепь, образованная только подвижными звеньями") Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой (на плоскости и в пространстве) равна нулю (Wгр = 0). Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, называются поводками.
Структурной группой Ассура (или группой нулевой подвижности) называется кинематическая цепь, образованная только подвижными звеньями механизма, подвижность которой (на плоскости и в пространстве) равна нулю (Wгр = 0). Конечные звенья групп Ассура, входящие в две кинематические пары, из которых одна имеет свободный элемент звена, называются поводками.
 Группы могут быть различной степени сложности. В зависимости от сложности, структурные группы Ассура делятся на классы, а классы в свою очередь делятся на порядки. Классом структурной группы Ассура называется число кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами группы (И. И. Артоболевского).
Группы могут быть различной степени сложности. В зависимости от сложности, структурные группы Ассура делятся на классы, а классы в свою очередь делятся на порядки. Классом структурной группы Ассура называется число кинематических пар, входящих в замкнутый контур, образованный внутренними кинематическими парами группы (И. И. Артоболевского).
 Порядок группы определяется числом внешних элементов кинематических пар, которыми группа присоединяется к имеющемуся механизму: первая группа присоединяется к первичному механизму, каждая последующая – к полученному механизму (при этом нельзя присоединять группы к одному звену). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп.
Порядок группы определяется числом внешних элементов кинематических пар, которыми группа присоединяется к имеющемуся механизму: первая группа присоединяется к первичному механизму, каждая последующая – к полученному механизму (при этом нельзя присоединять группы к одному звену). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп.
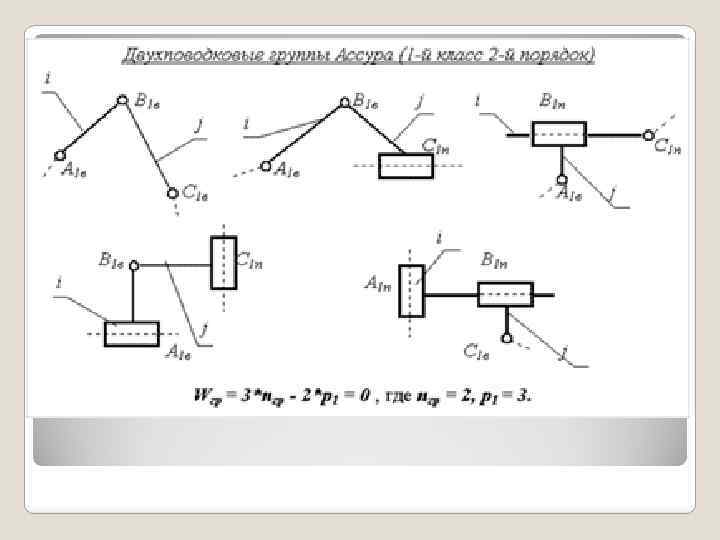
 Особенность структурных групп Ассура их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 1 го класса 2 го порядка. Число разновидностей таких групп для плоских механизмов с низшими парами невелико их всего пять (см. рис. ).
Особенность структурных групп Ассура их статическая определимость. Если группу Ассура свободными элементами звеньев присоединить к стойке, то образуется статически определимая ферма. Используя группы Ассура удобно проводить структурный, кинематический и силовой анализ механизмов. Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 1 го класса 2 го порядка. Число разновидностей таких групп для плоских механизмов с низшими парами невелико их всего пять (см. рис. ).
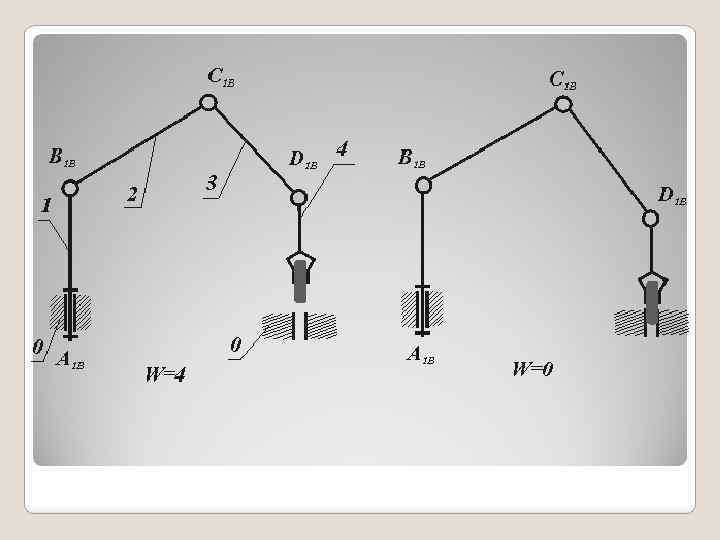
 к выбранным первичным механизмам с") При структурном синтезе механизма по Ассуру (рис. вверху страницы) к выбранным первичным механизмам с заданной подвижностью W 0 последовательно присоединяются структурные группы c нулевой подвижностью. Полученный таким образом механизм обладает рациональной структурой, т. е. не содержит избыточных связей и подвижностей. Структурному анализу по Ассуру можно подвергать только механизмы, не содержащие избыточных связей и подвижностей. Поэтому перед проведением структурного анализа необходимо устранить избыточные связи и выявить местные подвижности. Затем необходимо выбрать первичные механизмы и, начиная со звеньев наиболее удаленных от первичных, выделять из состава механизма структурные группы нулевой подвижности (рис. вверху страницы). При этом необходимо следить, чтобы звенья, остающиеся в механизме, не теряли связи с первичными механизмами.
При структурном синтезе механизма по Ассуру (рис. вверху страницы) к выбранным первичным механизмам с заданной подвижностью W 0 последовательно присоединяются структурные группы c нулевой подвижностью. Полученный таким образом механизм обладает рациональной структурой, т. е. не содержит избыточных связей и подвижностей. Структурному анализу по Ассуру можно подвергать только механизмы, не содержащие избыточных связей и подвижностей. Поэтому перед проведением структурного анализа необходимо устранить избыточные связи и выявить местные подвижности. Затем необходимо выбрать первичные механизмы и, начиная со звеньев наиболее удаленных от первичных, выделять из состава механизма структурные группы нулевой подвижности (рис. вверху страницы). При этом необходимо следить, чтобы звенья, остающиеся в механизме, не теряли связи с первичными механизмами.
 Ассур разработал структурную классификацию для плоских рычажных шарнирных механизмов (т. е. для механизмов только с вращательными парами). В дальнейшем Артоболевский И. И. усовершенствовал и дополнил эту классификацию, распространив ее на плоские механизмы и с поступательными парами. При этом были изменены и принципы классификации. В плоских механизмах группами являются кинематические цепи с низшими парами, которые удовлетворяют следующему условию: nгр – число звеньев в группе Ассура, включая фиктивные звенья, полученные при замене высших пар, p 1 – число кинематических пар пятого класса в группе Ассура, включая пары, полученные при замене высших пар.
Ассур разработал структурную классификацию для плоских рычажных шарнирных механизмов (т. е. для механизмов только с вращательными парами). В дальнейшем Артоболевский И. И. усовершенствовал и дополнил эту классификацию, распространив ее на плоские механизмы и с поступательными парами. При этом были изменены и принципы классификации. В плоских механизмах группами являются кинематические цепи с низшими парами, которые удовлетворяют следующему условию: nгр – число звеньев в группе Ассура, включая фиктивные звенья, полученные при замене высших пар, p 1 – число кинематических пар пятого класса в группе Ассура, включая пары, полученные при замене высших пар.
 Классификация структурных групп Ассура II VI классов Порядок Группа 2 -й III класса 4 -й 5 -й — — II класса 3 -й — — IV класса — — VI класса — —
Классификация структурных групп Ассура II VI классов Порядок Группа 2 -й III класса 4 -й 5 -й — — II класса 3 -й — — IV класса — — VI класса — —
 дополнительно классифицируются по видам,") Структурные группы 2 го класса (обычно называемые двухповодковыми группами Ассура) дополнительно классифицируются по видам, различающихся сочетанием вращательных и поступательных пар (рис. ниже): Структурный анализ механизма проводится путем расчленения его на структурные группы и первичные механизмы в порядке, обратном образованию механизма.
Структурные группы 2 го класса (обычно называемые двухповодковыми группами Ассура) дополнительно классифицируются по видам, различающихся сочетанием вращательных и поступательных пар (рис. ниже): Структурный анализ механизма проводится путем расчленения его на структурные группы и первичные механизмы в порядке, обратном образованию механизма.
, входящего в состав этой группы.") Класс группы Ассура определяется числом сторон замкнутого контура (многоугольника), входящего в состав этой группы. При этом все группы, имеющие два звена, относятся к группам II класса, а контур с числом сторон больше трех должен быть подвижным (т. е. иметь изменяемую форму при работе механизма). Порядок группы Ассура определяется числом элементов кинематических пар, которыми группа присоединяется к механизму. Группы Ассура второго класса одновременно являются группами второго порядка (иногда их называют двухповодковыми группами), но они еще подразделяются на виды. Вид группы Ассура зависит от сочетания вращательных (шарниров) и поступательных (ползунов) кинематических пар в данной группе. Всего существует пять видов групп Ассура второго класса.
Класс группы Ассура определяется числом сторон замкнутого контура (многоугольника), входящего в состав этой группы. При этом все группы, имеющие два звена, относятся к группам II класса, а контур с числом сторон больше трех должен быть подвижным (т. е. иметь изменяемую форму при работе механизма). Порядок группы Ассура определяется числом элементов кинематических пар, которыми группа присоединяется к механизму. Группы Ассура второго класса одновременно являются группами второго порядка (иногда их называют двухповодковыми группами), но они еще подразделяются на виды. Вид группы Ассура зависит от сочетания вращательных (шарниров) и поступательных (ползунов) кинематических пар в данной группе. Всего существует пять видов групп Ассура второго класса.
 Аксиомы статики. Все теоремы и уравнения статики выво дятся из нескольких исходных положений, принимаемых без матема тических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
Аксиомы статики. Все теоремы и уравнения статики выво дятся из нескольких исходных положений, принимаемых без матема тических доказательств и называемых аксиомами или принципами статики. Аксиомы статики представляют собою результат обобщений многочисленных опытов и наблюдений над равновесием и движением тел, неоднократно подтвержденных практикой. Часть из этих аксиом является следствиями основных законов механики, с которыми мы познакомимся в динамике.
 Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F 1 = F 2) и направлены вдоль одной прямой в противоположные стороны (рис. 10). Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равнове сии не может.
Аксиома 1. Если на свободное абсолютно твердое тело действуют две силы, то тело может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F 1 = F 2) и направлены вдоль одной прямой в противоположные стороны (рис. 10). Аксиома 1 определяет простейшую уравновешенную систему сил, так как опыт показывает, что свободное тело, на которое действует только одна сила, находиться в равнове сии не может.
 Аксиома 2. Действие данной си стемы, ил на абсолютно твердое тело не с изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравнове шенную систему, эквивалентны другу. Следствие из 1 й и 2 й аксиом. Действие силы на абсо лютно вердое тело т не изменится, если перенести точку при ложения силы вдоль ее линии действия в любую другую точку тела. В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис. 11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы и , такие, что = , =. От этого действие силы на тело не изменится. Но силы и со гласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В резуль тате а тело. Будет действовать только одна сила , равная , но н приложен ная в точке . В Таким образом, вектор, изобра жающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
Аксиома 2. Действие данной си стемы, ил на абсолютно твердое тело не с изменится, если к ней прибавить или от нее отнять уравновешенную систему сил. Эта аксиома устанавливает, что две системы сил, отличающиеся на уравнове шенную систему, эквивалентны другу. Следствие из 1 й и 2 й аксиом. Действие силы на абсо лютно вердое тело т не изменится, если перенести точку при ложения силы вдоль ее линии действия в любую другую точку тела. В самом деле, пусть на твердое тело действует приложенная в точке А сила (рис. 11). Возьмем на линии действия этой силы произвольную точку В и приложим к ней две уравновешенные силы и , такие, что = , =. От этого действие силы на тело не изменится. Но силы и со гласно аксиоме 1 также образуют уравновешенную систему, которая может быть отброшена. В резуль тате а тело. Будет действовать только одна сила , равная , но н приложен ная в точке . В Таким образом, вектор, изобра жающий силу , можно считать приложенным в любой точке на линии действия силы (такой вектор называется скользящим).
. Две силы, приложенные к телу в одной точке, имеют") Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Величина равнодействующей
Аксиома 3 (аксиома параллелограмма сил). Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах. Величина равнодействующей
 Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но проти воположное по направлению противодействие. Аксиома 5 (принцип отвердевания). Равновесие изме няемого (деформируемого) тела, находящегося под действием дан ной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сва ренными друг с другом и т. д
Аксиома 4. При всяком действии одного материального тела на другое имеет место такое же по величине, но проти воположное по направлению противодействие. Аксиома 5 (принцип отвердевания). Равновесие изме няемого (деформируемого) тела, находящегося под действием дан ной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым). Высказанное в этой аксиоме утверждение очевидно. Например, ясно, что равновесие цепи не нарушится, если ее звенья считать сва ренными друг с другом и т. д
 изучает движение тел без учета причин, его вызывающих. Она оперирует") Кинематика (раздел механики) изучает движение тел без учета причин, его вызывающих. Она оперирует такими величинами как перемещение, пройденный путь, время, скорость движения и ускорение.
Кинематика (раздел механики) изучает движение тел без учета причин, его вызывающих. Она оперирует такими величинами как перемещение, пройденный путь, время, скорость движения и ускорение.
 Система отсчета. Под системой отсчета понимается совокупность системы координат и часов. Понятие системы отсчета, включает в себя пространственно временную характеристику положения тела, при этом пространственная характеристика дается с помощью координат, а временная – с помощью часов. Механическим движением называется изменение взаимного расположения тел относительно друга в пространстве с течением времени. Любое механическое движение относительно. Материальной точкой называется такое тело, размерами и формой которого можно пренебречь в сравнении с размерами других тел или расстояниями до них в условиях данной задачи.
Система отсчета. Под системой отсчета понимается совокупность системы координат и часов. Понятие системы отсчета, включает в себя пространственно временную характеристику положения тела, при этом пространственная характеристика дается с помощью координат, а временная – с помощью часов. Механическим движением называется изменение взаимного расположения тел относительно друга в пространстве с течением времени. Любое механическое движение относительно. Материальной точкой называется такое тело, размерами и формой которого можно пренебречь в сравнении с размерами других тел или расстояниями до них в условиях данной задачи.
 . Радиус-вектор материальной точки Рассмотрим движение материальной точки М в прямоугольной системе координат, поместив начало коородинат в точку О на Земле Положение точки М относительно системы отсчета можно задать не только с помощью трех декартовых координат , но также с помощью одной векторной величины - радиуса-вектора точки М, проведенного в эту точку из начала системы координат. Если - единичные вектора (орты) осей прямоугольной декартовой системы координат Векторы вдоль соответствующих осей координат
. Радиус-вектор материальной точки Рассмотрим движение материальной точки М в прямоугольной системе координат, поместив начало коородинат в точку О на Земле Положение точки М относительно системы отсчета можно задать не только с помощью трех декартовых координат , но также с помощью одной векторной величины - радиуса-вектора точки М, проведенного в эту точку из начала системы координат. Если - единичные вектора (орты) осей прямоугольной декартовой системы координат Векторы вдоль соответствующих осей координат
 При движении материальной точки М ее координаты x, y, z и радиус-вектор r изменяются с течением времени t. Поэтому для задания закона движения материальной точки необходимо указать либо вид функциональной зависимости всех трех ее координат (1) от времени: либо зависимость от времени радиус-вектора этой точки от времени (2) Три скалярных уравнения (1) или эквивалентное им одно векторное уравнение (2) называются кинематическими уравнениями движения материальной точки.
При движении материальной точки М ее координаты x, y, z и радиус-вектор r изменяются с течением времени t. Поэтому для задания закона движения материальной точки необходимо указать либо вид функциональной зависимости всех трех ее координат (1) от времени: либо зависимость от времени радиус-вектора этой точки от времени (2) Три скалярных уравнения (1) или эквивалентное им одно векторное уравнение (2) называются кинематическими уравнениями движения материальной точки.
 Траекторией материальной точки называется линия, описываемая пространстве этой точкой при ее движении. В зависимости от формы траектории различают прямолинейное и криволинейное движения точки. Если все участки траектории точки лежат в одной плоскости, то движение точки называют плоским. Уравнения (1) и (2) задают траекторию точки в так называемой параметрической форме. Роль параметра играет время t. Решая эти уравнения совместно и исключая из них время t, найдем уравнение траектории. Длина пути. Длиной пути S материальной точки называют сумму длин всех участков траектории, пройденных точкой за рассматриваемый промежуток времени.
Траекторией материальной точки называется линия, описываемая пространстве этой точкой при ее движении. В зависимости от формы траектории различают прямолинейное и криволинейное движения точки. Если все участки траектории точки лежат в одной плоскости, то движение точки называют плоским. Уравнения (1) и (2) задают траекторию точки в так называемой параметрической форме. Роль параметра играет время t. Решая эти уравнения совместно и исключая из них время t, найдем уравнение траектории. Длина пути. Длиной пути S материальной точки называют сумму длин всех участков траектории, пройденных точкой за рассматриваемый промежуток времени.
 Вектором перемещения материальной точки за время t 2 t 1 , т. е. приращение радиуса вектора точки за рассматриваемый промежуток времени При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории. Из того, что перемещение является вектором, следует подтверждающийся на опыте закон независимости движений: если материальная точка участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме ее перемещений, совершаемых ею за тоже время в каждом из движений порознь.
Вектором перемещения материальной точки за время t 2 t 1 , т. е. приращение радиуса вектора точки за рассматриваемый промежуток времени При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории. Из того, что перемещение является вектором, следует подтверждающийся на опыте закон независимости движений: если материальная точка участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме ее перемещений, совершаемых ею за тоже время в каждом из движений порознь.