

GPS Fundamentals_rus.ppt
- Количество слайдов: 45
 Основы GPS Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
Основы GPS Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
 GPS – это: u u GPS = Глобальная Система Позиционирования Спутниковая система измерения времени и расстояний Управляется Министерством Обороны США Вся информация о системе GPS доступна в Интернет по адресу: u www. navcen. uscg. mil/gps/
GPS – это: u u GPS = Глобальная Система Позиционирования Спутниковая система измерения времени и расстояний Управляется Министерством Обороны США Вся информация о системе GPS доступна в Интернет по адресу: u www. navcen. uscg. mil/gps/
 3 сегмента системы GPS u u u Сегмент управления Космический сегмент Сегмент пользователей
3 сегмента системы GPS u u u Сегмент управления Космический сегмент Сегмент пользователей
 Глобальная система позиционирования Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
Глобальная система позиционирования Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
 Космический сегмент u u Спутник = “SV” или космический аппарат Полное созвездие u 30 действующих спутников u 3 резервных Возможно большее количество спутников ввиду развития системы Возможно меньшее количество из -за неисправностей спутников
Космический сегмент u u Спутник = “SV” или космический аппарат Полное созвездие u 30 действующих спутников u 3 резервных Возможно большее количество спутников ввиду развития системы Возможно меньшее количество из -за неисправностей спутников
 Космический сегмент u u u 6 орбит вокруг земного шара Номинально 5 спутников на орбите Наклон орбиты к экватору 55º Возвышение орбит приблизительно 20000 км 2 оборота по орбите в день на 4 мин раньше за день = на 2 часа раньше в месяц
Космический сегмент u u u 6 орбит вокруг земного шара Номинально 5 спутников на орбите Наклон орбиты к экватору 55º Возвышение орбит приблизительно 20000 км 2 оборота по орбите в день на 4 мин раньше за день = на 2 часа раньше в месяц
 Сегмент управления u u Наземное базирование Главная управляющая станция в г. Schriever на базе ВВС в Колорадо 4 дополнительных станции мониторинга вокруг земного шара Возможность отслеживать и управлять спутниками, а также посылать им данные
Сегмент управления u u Наземное базирование Главная управляющая станция в г. Schriever на базе ВВС в Колорадо 4 дополнительных станции мониторинга вокруг земного шара Возможность отслеживать и управлять спутниками, а также посылать им данные
 Сегмент пользователей Военные и гражданские пользователи
Сегмент пользователей Военные и гражданские пользователи
 Преимущества системы GPS Доступность 24 часа в сутки u Глобальность покрытия u Всепогодность u Работает при любой видимости – ночь, пыль, туман u Сигнал бесплатный u
Преимущества системы GPS Доступность 24 часа в сутки u Глобальность покрытия u Всепогодность u Работает при любой видимости – ночь, пыль, туман u Сигнал бесплатный u
 может не") Недостатки системы GPS u u Требуется открытый небосвод Точность определения отметок (высот) может не удовлетворять некоторым требованиям
Недостатки системы GPS u u Требуется открытый небосвод Точность определения отметок (высот) может не удовлетворять некоторым требованиям
 Точность u u Зависит от типа приемника – ознакомьтесь со спецификацией оборудования! Точность определения отметок (высот) в 23 раза хуже определения плановых координат
Точность u u Зависит от типа приемника – ознакомьтесь со спецификацией оборудования! Точность определения отметок (высот) в 23 раза хуже определения плановых координат
 Определение местоположения при помощи системы GPS Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
Определение местоположения при помощи системы GPS Ваши координаты: 50 o 30. 25’ N 30 o 30. 10’ E
 Геоцентрическая система координат +Z ГСК X = -2691542. 5437 m Y = -4301026. 4260 m Z = 3851926. 3688 m Z Y X -Y +X
Геоцентрическая система координат +Z ГСК X = -2691542. 5437 m Y = -4301026. 4260 m Z = 3851926. 3688 m Z Y X -Y +X
 Эллипсоид a = большая полуось b = малая полуось H b a Эллипсоид WGS-84 a = 6378137. 000000 m b = 6356752. 314245 m 1/f = 298. 2572235630 a l f
Эллипсоид a = большая полуось b = малая полуось H b a Эллипсоид WGS-84 a = 6378137. 000000 m b = 6356752. 314245 m 1/f = 298. 2572235630 a l f
 ГСК и WGS-84 +Z ГСК X = -2691542. 5437 m Y = -4301026. 4260 m Z = 3851926. 3688 m H Zf X WGS-84 f = 37 23’ 26. 38035” N l = 122 o 02’ 16. 62574” W H = -5. 4083 m o b Y l a -Y +X
ГСК и WGS-84 +Z ГСК X = -2691542. 5437 m Y = -4301026. 4260 m Z = 3851926. 3688 m H Zf X WGS-84 f = 37 23’ 26. 38035” N l = 122 o 02’ 16. 62574” W H = -5. 4083 m o b Y l a -Y +X
 GPS высоты и отметки и H e N e = ортометрическая высота H = высота над эллипсоидом N = высота над геоидом e H N но х ер ов П e H N ид о пс и л Эл д ои е Г e=H-N ь ст з л ем
GPS высоты и отметки и H e N e = ортометрическая высота H = высота над эллипсоидом N = высота над геоидом e H N но х ер ов П e H N ид о пс и л Эл д ои е Г e=H-N ь ст з л ем
 Структура спутникового сигнала Частота Номинал Длина волны L 1 1575. 42 MHz 19 cm L 2 1227. 60 MHz 24 cm Кодовая модуляция C/A-код P(Y)-код NAVDATA C/A - грубый код P - точный код (Y-код когда зашифрован) NAVDATA (навигационное сообщение) – здоровье спутников, поправки часов, параметры орбит
Структура спутникового сигнала Частота Номинал Длина волны L 1 1575. 42 MHz 19 cm L 2 1227. 60 MHz 24 cm Кодовая модуляция C/A-код P(Y)-код NAVDATA C/A - грубый код P - точный код (Y-код когда зашифрован) NAVDATA (навигационное сообщение) – здоровье спутников, поправки часов, параметры орбит
 Структура спутникового сигнала Несущая C/A-код P-код NAVDATA Принимаемый сигнал
Структура спутникового сигнала Несущая C/A-код P-код NAVDATA Принимаемый сигнал
 Структура спутникового сигнала L 1 = 19 cm L 2 = 24 cm Несущая Код
Структура спутникового сигнала L 1 = 19 cm L 2 = 24 cm Несущая Код
 Типы решений u u Автономное u 10 -15 m в плане DGPS u 0. 5 - 3 m в плане “Плавающее” u субметровое “Фиксированное” u 1 -3 cm
Типы решений u u Автономное u 10 -15 m в плане DGPS u 0. 5 - 3 m в плане “Плавающее” u субметровое “Фиксированное” u 1 -3 cm
") Типы решений Наблюдения GPS Кодовые дальности Автономное решение DGPS-решение Фазы несущей Плавающее решение (инициализация) Фиксированное решение (сантиметровая точность)
Типы решений Наблюдения GPS Кодовые дальности Автономное решение DGPS-решение Фазы несущей Плавающее решение (инициализация) Фиксированное решение (сантиметровая точность)
 в плане +/- 15") Результаты работы по коду Автономное решение +/- 10 m (СКО) в плане +/- 15 m (СКО) по высоте
Результаты работы по коду Автономное решение +/- 10 m (СКО) в плане +/- 15 m (СКО) по высоте
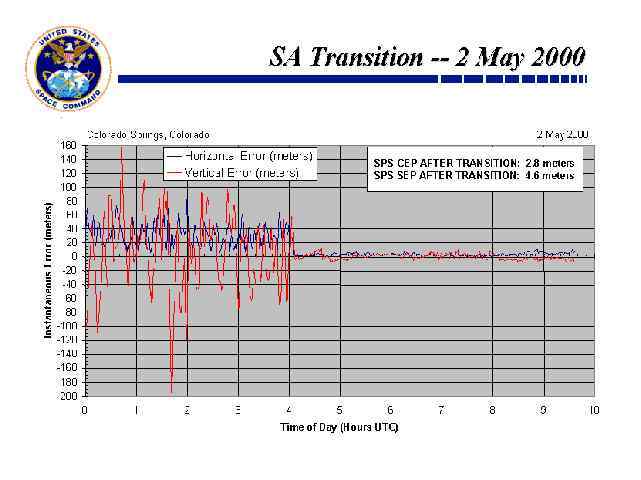
 Автономное решение u 3 D точность = 100 m до мая 2000 года u u Режим «Избирательного доступа» (SA) выключен в мае 2000 года, что улучшило автономное позиционирование 3 D точность сейчас = 10 -15 m Базируется на C/A-коде Единственное возможное решение для одного GPS-приемника без дополнительных коррекций ? ? ? ? s 15 m r ete
Автономное решение u 3 D точность = 100 m до мая 2000 года u u Режим «Избирательного доступа» (SA) выключен в мае 2000 года, что улучшило автономное позиционирование 3 D точность сейчас = 10 -15 m Базируется на C/A-коде Единственное возможное решение для одного GPS-приемника без дополнительных коррекций ? ? ? ? s 15 m r ete
 Определение координат по GPS u u u Расстояние = скорость x время u Скорость = скорость света u Время прохождения сигнала измеряется приемником Принцип трилатерации Требуется минимум 4 спутника для 3 Dкоординат
Определение координат по GPS u u u Расстояние = скорость x время u Скорость = скорость света u Время прохождения сигнала измеряется приемником Принцип трилатерации Требуется минимум 4 спутника для 3 Dкоординат
 GPS за 5 шагов !! 2: Положение спутников 3: Атмосферная коррекция 4: Трилатерация 5: Ход часов 1: Спутниковая дальнометрия
GPS за 5 шагов !! 2: Положение спутников 3: Атмосферная коррекция 4: Трилатерация 5: Ход часов 1: Спутниковая дальнометрия
 до спутника u Время прохождения сигнала u Расстояние") 1: Спутниковая дальнометрия Измерение расстояния (псевдодальности) до спутника u Время прохождения сигнала u Расстояние = Скорость x Время 50 нд ми ли сек унд м 40 ил ку исе
1: Спутниковая дальнометрия Измерение расстояния (псевдодальности) до спутника u Время прохождения сигнала u Расстояние = Скорость x Время 50 нд ми ли сек унд м 40 ил ку исе
 1: Спутниковая дальнометрия u Основана на измерениях по коду измерение отрезка времени между одинаковыми участками кода Со спутника Из приемника
1: Спутниковая дальнометрия u Основана на измерениях по коду измерение отрезка времени между одинаковыми участками кода Со спутника Из приемника
 2: Положение спутников u Эфемериды Координаты спутника на момент наблюдения u Расстояние до спутника u u Определение местоположения Ваши координаты: 37 o 23. 323’ С 122 o 02. 162’ В
2: Положение спутников u Эфемериды Координаты спутника на момент наблюдения u Расстояние до спутника u u Определение местоположения Ваши координаты: 37 o 23. 323’ С 122 o 02. 162’ В
 2: Альманах • Работа всей системы • Планирование наблюдений • Данные о каждом спутнике
2: Альманах • Работа всей системы • Планирование наблюдений • Данные о каждом спутнике
 3: Атмосферная коррекция Спутниковые сигналы претерпевают задержки прохождении слоев атмосферы Ионос фера Тро п осф ера Ровер База < 10 км > 10 км
3: Атмосферная коррекция Спутниковые сигналы претерпевают задержки прохождении слоев атмосферы Ионос фера Тро п осф ера Ровер База < 10 км > 10 км
 4: Трилатерация
4: Трилатерация
 4: Трилатерация
4: Трилатерация
 3 сферы не пересекутся в одной точке если") 5: Ход часов (мин. 4 спутника) 3 сферы не пересекутся в одной точке если есть ошибка хода часов u. Для определения 3 D-координат требуется 4 спутника u 5 сек (ошибка) 9 сек (ошибка) 7 сек (ошибка)
5: Ход часов (мин. 4 спутника) 3 сферы не пересекутся в одной точке если есть ошибка хода часов u. Для определения 3 D-координат требуется 4 спутника u 5 сек (ошибка) 9 сек (ошибка) 7 сек (ошибка)
 Источники ошибок в GPS u u u Министерство обороны США Ошибка часов приемника u Исправляется математически u Для этого нужно минимум 4 спутника Атмосфера u Ионосфера u Тропосфера Многолучевость Интерференция радиоволн Человеческий фактор
Источники ошибок в GPS u u u Министерство обороны США Ошибка часов приемника u Исправляется математически u Для этого нужно минимум 4 спутника Атмосфера u Ионосфера u Тропосфера Многолучевость Интерференция радиоволн Человеческий фактор
 –") Избирательный доступ и Защита доступа u u Министерство обороны США Избирательный доступ (SA) – отключен u u u Сбой часов Ошибка эфемерид Защита доступа (AS) u Шифрование P-кода ? ? ? ? ов 0 10 м р ет
Избирательный доступ и Защита доступа u u Министерство обороны США Избирательный доступ (SA) – отключен u u u Сбой часов Ошибка эфемерид Защита доступа (AS) u Шифрование P-кода ? ? ? ? ов 0 10 м р ет
 Атмосферные эффекты Ионос фера Тропо с фера < 10 км > 10 км
Атмосферные эффекты Ионос фера Тропо с фера < 10 км > 10 км
 Многолучевость
Многолучевость
 Человеческий фактор Ошибка измерения высоты антенны и её центрирования – наиболее частовстречающаяся
Человеческий фактор Ошибка измерения высоты антенны и её центрирования – наиболее частовстречающаяся
 Другие источники Открытый небосвод u Деревья, растительность, высотные здания ослабляют сигнал u Расположение спутников u
Другие источники Открытый небосвод u Деревья, растительность, высотные здания ослабляют сигнал u Расположение спутников u
 Видимость и расположение спутников
Видимость и расположение спутников
 Хорошее расположение • PDOP = Фактор потери точности позиционирования • PDOP выражается числом, чем меньше – тем лучше • PDOP < 4 хорошо для съемки; < 7 приемлемо
Хорошее расположение • PDOP = Фактор потери точности позиционирования • PDOP выражается числом, чем меньше – тем лучше • PDOP < 4 хорошо для съемки; < 7 приемлемо
 Плохое расположение
Плохое расположение
 (> 7)") Плохое расположение • PDOP будет высокий (плохой) (> 7)
Плохое расположение • PDOP будет высокий (плохой) (> 7)
 Терминология в GPS “Маска возвышения” Установка в приемнике – спутники ниже этой маски будут игнорироваться (По умолчанию = 13 градусов) “Маска PDOP” Установка в приемнике – если PDOP превышает маску, координаты не вычисляются (По умолчанию = 7)
Терминология в GPS “Маска возвышения” Установка в приемнике – спутники ниже этой маски будут игнорироваться (По умолчанию = 13 градусов) “Маска PDOP” Установка в приемнике – если PDOP превышает маску, координаты не вычисляются (По умолчанию = 7)