ЭЛ.ОБОРУДОВАНИЕ доп..ppt
- Количество слайдов: 128



ОСНОВЫ ЭЛЕКТРООБОРУДОВАНИЯ Луценко Владимир Никифорович Ст. преподаватель Для студентов неэлектротехнических специальностей Один семестр ЗАЧЁТ

ОСНОВЫ ЭЛЕКТРООБОРУДОВАНИЯ Библиографический список Основной: 1. Электротехника. Под. ред. В. С. Пантюшина- М. : Высшая школа, 1976. 2. Электротехника. А. С. Касаткин, М. В. Немцов – М. : Академия, 2005, (2003). Дополнительный: 1. Основы промышленной электроники. Под. Ред. В. Г. Герасимова – М. : Высшая школа, 1978. 2. Гусев В. Г. , Гусев Ю. М. Электроника. - М. : Высш. шк. , 1991.

Основы электрооборудования Введение Электрооборудование – комплекс электрических устройств для получения, распределения и использования электроэнергии. Состав э. о. – трансформаторы, эл. машины, электронные приборы, выпрямители и множество пусковой и распределительной аппаратуры

Тема 1. Трансформаторы Трансформатором называется статический электромагнитный аппарат, предназначенный для преобразования переменного тока одного напряжения в переменный ток другого напряжения при той же частоте. По конструкции и применению трансформаторы разделяют на силовые, сварочные, измерительные, специальные

Историческая справка 1876 г. - П. Я. Яблочков изобрёл трансформатор с разомкнутым магнитопроводом и применил для питания электрической свечи. 1885 г. - венгры М. Дери, О. Бладт, К Циперновский разработали однофазные трансформаторы для промышленности. 1889 г. - 91 г. – М. О. Доливо –Добровольский, Н. Тесла разработали трёхфазные трансформаторы. По конструкции и применению трансформаторы разделяют на силовые, сварочные, измерительные, специальные.

Принцип действия однофазного трансформатора

Принцип действия однофазного трансформатора Принцип работы в режиме холостого хода Вторичная обмотка разомкнута. В первичной синусоидальное напряжение U 1 и I 1 x – ток х. х. МДС F 1= I 1 x. W 1 вызывает поток Ф и в обмотках индуктируется ЭДС е 1 и е 2 Действующие значения ЭДС пропорциональны числам витков: . E 1 = 4, 44 f. W 1 Фm; E 2 = 4, 44 f. W 2 Фm.

Коэффициент трансформации Отношение Э. Д. С. , равное отношению чисел. витков наз. коэффициентом трансформации трансформатора : Е 1 /Е 2 = w 1 /w 2 = n. При Е 1 < Е 2, - трансформатор повышающий, при Е 1 > Е 2 - трансформатор понижающий. Так как при холостом ходе E 1≈ U 1, а E 2= U 2, то для понижающего трансформатора U 1> U 2, n = U 1 ном. /U 2 ном. = W 1/W 2, для повышающего трансформатора U 2>U 1,

Коэффициент трансформации З А Д А Ч А 1. Задача № 1. 1 Д а н о: номинальная мощность трансформатор S 1 ном= 3 к. В*А, напряжение питающей сети U 1 ном= 127 В, вторичное напряжение при холостом ходе U 20= 60 В, число витков вторичной обмотки w 2 = 40. О п р е д е л и т ь: коэффициент трансформации n, число витков первитчной обмотки трансформатора w 1, номинальные токи в обмотках трансформатора I 1 ном. и I 2 ном Ответ: n = 2, 11; w = 84, 4; I 1 НОМ= 23, 6 А; I 2 НОМ= 50 А.

Холостой ход трансформатора

Уравнение электрического состояния трансформатора Режим холостого хода Часть потока Ф 1 d- поток рассеяния. Он наводит в витках e 1 d– ЭДС рассеяния, в расчётах их представим как u 1 d падение напряжения на индуктивном сопротивлении рассеяния x 1 d= ωL 1 d , где L 1 d=Ψ 1 d/i 1 x, Ψ 1 d- потокосцепление рассеяния первичной обмотки u 1 d= L 1 ddi 1 x/dt или в комплексной форме U 1 d= j. X 1 d. I 1 x.

Уравнение электрического состояния для первичной обмотки трансфор-а. По второму закону Кирхгофа, для контура первичной обмотки: u 1= -e 1 + R 1 i 1 x+ L 1 ddi 1 x/dt u 1= - e 1+ R 1 i 1 x+ u 1 d. Где u 1 d= L 1 ddi 1 x/dt – падение напряжения на индуктивном сопротивлении рассеяния. В комплексной форме U 1 d = j. X 1 d. I 1 x, U 1= - E 1+ R 1 I 1 X + j. X 1 d. I 1 X Этому уравнению соответствует векторная диаграмма.

Векторная диаграмма трансформатора в режиме холостого хода

Построение векторной диаграммы при холостом ходе трансфрматора Откладываем вектор Ф=Фm. Sin ωt, I 0 - опережает Ф на угол потерь δ. ЭДС Е 1 и Е 2 - отстают от Ф на π/2. Ток хол. хода , где IP – является намагничивающим током, Ia – определяется потерями в стали магнитопровода, φ0 – сдвиг фаз близок к 900. Ток х. х. очень мал. Поэтому можно принять На диаграмме вектор U 1, равный и противоположный вектору Е 1

Рабочий режим трансформатора

Рабочий режим трансформатора Уравнения для первичной обмотки: e 1 = - u 1+ R 1 i 1+ L 1 ddi 1/dt, u 1= - e 1+R 1 i 1+u 1 d, или в комплексном виде : U 1= - E 1+R 1 I 1+j. X 1 d. I 1, где R 1 + j. X 1 d = Z 1 Для вторичной цепи: e 2=u 2 - R 2 i 2 - u 2 d, где u 2 d=L 2 ddi 2/dt – падение напряжения на сопротивлении рассеяния. В комплексной форме U 2=E 2+ R 2 I 2+ j. X 2 d. I 2 , где R 2 + jx 2 = Z 2

Уравнение магнитодвижущих сил МДС для мгновенных значений: i 1 w 1 - i 2 w 2= F 1 – F 2 = F. В режимах от х. х. до номинального поток Ф не изменяется при неизменном U 1, поэтому: i 1 w 1 - i 2 w 2 = i 1 xw 1 или I 1 w 1 + I 2 w 2 = I 1 Xw 1. Разделив на w 1 получим I 1 – I 2 w 2/w 1 = I 1 X. Обозначив I 2 w 2/w 1 = I 2’; I 1 – I 2’ = I 1 x или I 1 X + I 2’ = I 1 X – определяет основной магнитный поток Ф; I 2’–компенсирует размагничивающее действие тока I 2. Пренебрегая I 1 X имеем I 1/I 2 =W 2/W 1 или с индексами В и Н, IBH/IHH = WHH/WBH

Последовательность построения диаграммы Строим вектор I 2’ в произвольном направлении. Вектор U 2’ опережает I 2’ на угол φ2. Строим E 2’= U 2’ + R 2’I 2’ + j. X 2 d. I 2’. Строим I 1 = I 2’ + I 1 x, где I 1 x – опережает вектор Ф на угол потерь δ. Вектор напряжения первичной обмотки строим по уравнению электрического состояния U 1 = E 1 + R 1 I 1 + j. X 1 d. I 1.

Векторная диаграмма приведенного трансформатора

Рабочий режим трансформатора задача 3. Задача 1. 5 О п р е д е л и т ь ток I 1 в линии, если амперметр , включенный в цепь вторичной обмотки трансформатора тока, показывает I 2= 4 A, а номинальные первичный и вторичный токи трансформатора тока I 1 ном= 50 А, I 2 ном= 5 А. Ответ: I 1= 40 A.

Рабочий режим трансформатора Задача № 4 Д а н о: частота питающей сети f = 50 Гц, число витков обмоток трансформатора w 1=250 и w 2=1250, площадь поперечного сечения магнитопровода S = 4 см 2, амплитудное значение магнитной индукции Bm= 1 Тл. О п р е д е л и т ь: коэффициент трансформации трансформатора n и действующие значения ЭДС обмоток однофазного трансформатора Е 1 и Е 2.

Приведение параметров вторичной обмотки к числу витков первичной обмотки Примем W 2’=W 1=n. W 2 тогда E 2’=E 1=n. E 2; U 2’=U 1=n. U 2 ; I 2’=I 2 W 2/W 1=I 2/n; R 2’=R 2(I 2/I 2’)2=n 2 R 2 ; аналогично X 2’=n 2 X 2. С учётом указанных соотношений система уравнений имеет вид: U 1=E 1+ R 1 I 1+ j. X 1 I 1, E 2’=E 1=U 2’+ R 2’I 2’+ j. X 2’I 2’, I 1 X=I 1 - I 2’.

Схема замещения приведенного трансформатора

Схема замещения приведенного трансформатора Приведенный трансформатор математически описывается уравнениями электрического состояния: U 1 = E 1 + R 1 I 1 + j. X 1 d. I 1 U 2’= E 2’- R 2’I 2’- j. X 2 d. I 2’ I 1 = I 1 X+ I 2’. При токе I 1 X , мощность потерь в сопротивлении ветви холостого хода R 0 , эквивалентна потерям в магнитопроводе, т. е. R 0 I 21 X= DP Комплексное сопротивление ветви холостого хода Z 0 = R 0 + Jx 0. Падение напряжения на ветви холостого хода при токе I 1 X: U 0= I 1 XZ 0= E 1 = E 2’.

Упрощённая схема замещения трансформатора В упрощённой схеме замещения не учитывают ток холостого хода из-за его малости. Сопротивления короткого замыкания RK= R 1+ R 2’ и XK= X 1 d+ X 2 d.

ЗАДАЧА № 5 Задача № 1. 6 Д а н о: трёхфазный трансформатор S 1 ном= 50 к. В*А. Обмотки соединены по схеме «звезда» ; номинальные напряжения обмоток: U 1 ном= 6 Кв, U 2 ном= 0, 525 Кв, частота питающего напряжения fном= 50 Гц, ток холостого хода I 0= 7%I 1 ном, мощность холостого хода Р 0= 0, 350 к. Вт, напряжение к. з. Uk= 5, 5%, мощность к. з. Рк= 0, 325 к. Вт. О п р е д е л и т ь параметры упрощённой (Г – образной) схемы замещения (см. рис. ) трансформатора.

Потери и КПД трансформатора Уравнение баланса мощности в цепи с трансформатором: P 1= P 2+ DPСТ+ DPM. P 1 – активная мощность, поступающая из сети. P 2=U 2 I 2 cos j 2 -активная мощность потребителей. D PСТ- мощность потерь в стали. D PM- мощность потерь в проводах обмоток. D P = DPCT+ DPM – суммарная мощность потерь в трансформаторе.

КПД трансформатора можно вычислить по формуле: Введём понятие коэффициента нагрузки b = P 1/P 1. ном=P 2/P 2. ном Из опытов х. х. и к. з. имеем: DPст= Px; DPM= Rk. I 12=b 2 Rk. I 12= b 2 PK. НОМ. Тогда К. П. Д. Где Px – показание ваттметра при опыте хол. Хода. PK. HOM= R 1 I 12 HOM= R 2. I 2. 2 HOM- показание ваттметра при к. з.

КПД трансформатора Задача 6. Задача № 1. 7 Д а н о: трёхфазный трансформатор ТМ – 100/6, обмотки включены по схеме «звезда» , S 1 ном= 100 к. В*А, линейные напряжения U 1 ном= 6 к. В, U 2 ном= 0, 525 к. В, потери холостого хода Р 0= 600 Вт, потери короткого замыкания при номинальном токе Рк= 2400 Вт. О п р е д е л и т ь: коэффициент трансформации n и КПД η трансформатора при номинальной нагрузке (cos φ2 = 0, 8).

Коэффициент трансформации З А Д А Ч А 2. Задача № 1. 3 Д а н о: трёхфазный трансформатор, число витков первичной обмотки w 1= 2002, вторичной w 2= 134, номинальное линейное напряжение первичной обмотки U 1 ном= 6000 В. О п р е д е л и т ь: коэффициент трансформации n и номинальные действующие значения первичного и вторичного фазных U 1 ф ном, U 2 ф ном и линейных U 1 л ном и U 2 л ном напряжений, при соединении обмоток соответственно «звезда – звезда» и «звезда – треугольник» .
![Тема 1. 1 Однофазные трансформаторы Основная литература: [1], c. 258 -279, [2], c. 193](https://present5.com/presentation/87559740_234223040/image-31.jpg "Тема 1. 1 Однофазные трансформаторы Основная литература: [1], c. 258 -279, [2], c. 193")
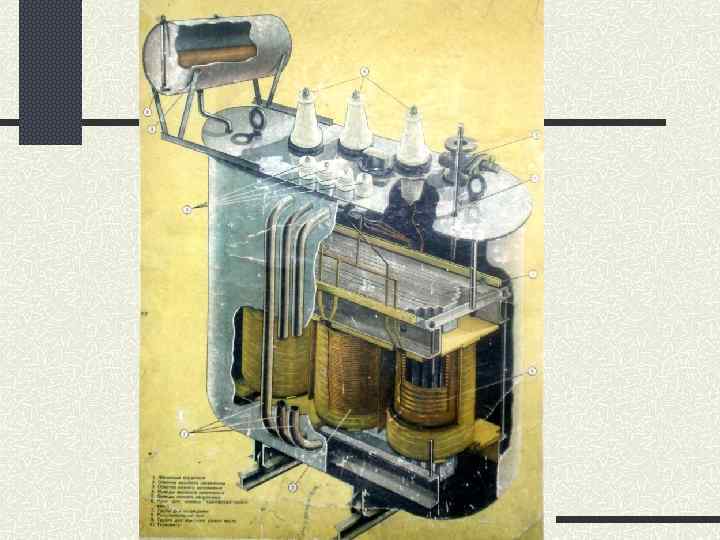
Тема 1. 1 Однофазные трансформаторы Основная литература: [1], c. 258 -279, [2], c. 193 -210. Контрольные вопросы: Назначение трансформаторов. Основные элементы однофазных трансформаторов. Назначение магнитопровода трансформатора. Какие явления положены в основу принципа действия трансформатора. Что такое коэффициент трансформации? Области применения трансформаторов. Потери мощности в однофазных трансформаторах. Цель испытания трансформаторов. Зависимость КПД трансформаторов от коэффициента нагрузки. Схемы лабораторных установок для проведения опытов холостого хода и короткого замыканиятрансформаторов.

Трёхфазные и измерительные трансформаторы. Автотрансформаторы Тема 1. 2 В трёхфазной цепи применяется группа из трёх однофазных тр-ов или один трёхфазный. Обмотки Соединяют звездой или треугольником. Начала обмоток обозначаются А, В, С, а, в, с, концы X, Y, Z, x Y, z. Наиболее распространённые схемы и группы соединения обмоток трансформаторов: Y/Y – 12 – звезда-звезда, группа 12; Y/D – 11 – звезда – треугольник, группа 11; Y/Y 0 - 12 – звезда с нулём, группа 12.

Группа из трёх однофазных трансформаторов

Устройство и особенности трёхфазных трансформаторов Трёхфазный трёхстержневой трансформатор имеет на каждом стержне две обмотки. Магнитные потоки в фазах сдвинуты между собой на 1200 и их сумма равна О, т. е. ФА + ФВ + ФС = О. Угол сдвига фаз между одноимёнными напряжениями в первичноё и вторичноё обмотках, определяет группу соединения обмоток и обозначается в соответствии с направлением часовой и минутной стрелками часов.

Трехстержневой трансформатор

Коэффициент трансформации трёхфазного трансформатора В трёхфазных трансформаторах различают два коэффициента трансформации. Фазный nф= U 1 ф/U 2 ф= W 1/W 2. Линейный nл= U 1 Л/U 2 Л. В схемах Y/Y и D/D коэффициенты nл= nф. Y/D, nл= nф / √ 3 D/Y, nл= nф√ 3 трансформации равны, Для схемы

Паспортные данные трансформаторов В паспорте и на щитке трансформатора указывается: Полная мощность: Sн = U 1 ном. I 1 нм= U 2 ном. I 2 ном k. BA. Номинальные напряжения в режиме х. х: U 1 ном, U 2 ном Мощность потерь в режимах х. х. и к. з. : Px, , Pk ном. Напряжение к. з. в процентах номинального uk%. Ток х. х. в процентах номинального I 1. x. %. Схема и группа соединений Y/Y-0, Y/D-11.
 h")
Внешние характеристики трансформатора Для определения эксплуатационных свойств трансформаторов пользуются Зависимость : j 1=f(b) h = f(b) U 2= f(b) I 1= f(b) DPM=f(b) DPCT=f(b) Cos

Напряжение короткого замыкания Из схемы замещения U 1 K=ZKI 1 ном Обычно U 1 K=(5 -8)%U 1 ном Активная составляющая Реактивная составляющая Процентное значение напряжения короткого замыкания

ЗАДАЧА № 7 Дано: ТМ-25/6, U 2 НОМ=0, 23 к. В, Р 0=0, 13 к. Вт, РК=0, 6 к. Вт, UК%=4, 5, β=0, 5, cosφ2=1, Т 1=103 ч/год-время работы трансформатора с полной нагрузкой, Т 2=3, 5*103 ч/год – время работы с нагрузкой, равной 50% (β = 0, 5) от номинальной, Т 0=1, 4*103 ч/год – время работы без нагрузки (β = 0). Определить: n, ηном при β = 1 и cosφ2=0. 8, I 1 ном и I 2 ном, RК, ХК, R 1, R 2”, X 1, X 2”, Uк. R, Uк. L, U 2 при токе нагрузки I 2= 2 I 2 ном и cosφ2= 0, 7, среднегодовой КПД ηг при активной нагрузке (cosφ2=1).

Измерительные трансформаторы И. Т. подразделяются на трансформаторы напряжения и трансформаторы тока. Они применяются для расширения пределов измерений, для питания цепей Р. З. и авто – матики. И. Т. изолируют измерительные приборы от цепей высокого напряжения. Измерительные приборы и цепи Р. З. и А. подключаются ко вторичным обмоткам трансформаторов.

Измерительные трансформаторы напряжения Они работают в режиме близком к режиму холостого хода. Номинальный коэффициент трансформации: nu= W 1/W 2 = U 1 ном/U 2 ном. Из-за падения напряжения в обмотках трансформатора, действительный коэффициент трансформации отличается от номинального ( паспортного ) и вызывает погрешность измерения. Фазовый сдвиг между напряжениями U 1 и U 2 вносит ещё и угловую погрешность.

Типовые схемы соединения обмоток трансформаторов напряжения

Типовые схемы соединения обмоток трансформаторов напряжения 1. Однофазный трансформатор включен на линейное напряжение. 2. Два трансформатора включены в открытый треугольник. 3. Три трансформатора включены в “звезду”. 4. Разомкнутый треугольник. ( Фильтр напряжений нулевой последовательности).

Пятистержневой трансформатор В нормальном режиме: UA+ UB+ UC= O. U 01 -02= O. При однофазном замыкании. U 01 - 02 O

Измерительные трансформаторы тока Первичная обмотка включается в сеть последовательно. Через неё протекает весь ток нагрузки или к. з. Коэффициент трансформации т. тока I 1/I 2 = W 2/W 1 откуда I 2= W 1 / W 2 * I 1 = n. TI 1. Справедливо при IX= 0, но так как IX не равно 0, возникает погрешность при определении I 1. Сдвиг фаз между I 1 и I 2 вызывает угловую погрешность. Т. тока выпускают с I 2 ном= 5 или 1 А. Коэффициент трансформации указывается дробью. Например: 600/5 или 600/1. Где числитель – ток первичный, знаменатель ток вторичный.

Схемы соединения обмоток трансформаторов тока

Схемы соединения обмоток трансформаторов тока 1. Схема соединения обмоток т. т. в “звезду. ” 2. Схема соединения в неполную “звезду. ” 3. Схема соединения в “треугольник”. 5. Фильтр токов нулевой последовательности. 6. Схема соединения обмоток на разность токов двух фаз.

АВТОТРАНСФОРМАТОРЫ

Автотрансформаторы Не учитывая падение напряжения в обмотках и пренебрегая током х. х. n = UВном/ UHном= WB/WH. В общей части обмотки ток I 12= I 2 - I 1= I 1 n – I 1 = I 1(n-1). Автотрансформаторы применяются при 1< n < 3.

ЗАДАЧА № 8 Определить: Дано: автотрансформатор, U 1 ном=127 В, при активной нагрузке Rн cosφ2= 1, I 2 ном= 4 А, U 2 ном= 220 В. номинальный ток I 1 ном первичной цепи, ток в нагрузке I и коэффициент трансформации n, если КПД ηном= 0, 95, а cosφ1 ном= 0, 9.
![Трёхфазные и измерительные трансформаторы. Автотрансформаторы Тема 1. 2 Основная литература: [1], c. 285 -295.](https://present5.com/presentation/87559740_234223040/image-53.jpg "Трёхфазные и измерительные трансформаторы. Автотрансформаторы Тема 1. 2 Основная литература: [1], c. 285 -295.")
Трёхфазные и измерительные трансформаторы. Автотрансформаторы Тема 1. 2 Основная литература: [1], c. 285 -295. [2], c. 218 -226. Контрольные вопросы: Способы трансформации трёхфазного тока. Основные элементы трёхфазных трансформаторов. Назначение измерительных трансформаторов. Особенности устройства измерительного трансформатора тока. Схемы включения измерительных трансформаторов напряжения и тока в электрические цепи. Отличительная особенность автотрансформаторов. Повышающие и понижающие автотрансформаторы с нерегулируемым коэффициентом трансформации. Автотрансформаторы с регулируемым коэффициентом трансформации.

Тема 2. Асинхронные машины Общие сведения А. М. называется беcколлекторная машина переменного тока, у которой в установившемся режиме частота вращения магнитного поля не равна частоте вращения ротора. А. М. применяют в основном в качестве электродвигателей. По числу фаз статорной обмотки различают одно-, двух- и трёхфазные двигатели. Двухфазные двигатели применяют в системах автоматического управления, однофазные – в бытовых машинах и приборах.

Устройство, принцип действия и режим работы трёхфазных асинхронных машин Тема 2. 1

Асинхронный двигатель. Устройство

Конструкция статора асинхронной машины Статор цилиндрической формы состоит из корпуса, сердечника и обмотки. Корпус стальной, чугунный или алюминиевый. Сердечник из тонких листов электротех-ой стали на внутренней поверхности имеет пазы для размещения обмотки. Обмотки соединяют звездой или треугольником.

Конструкции ротора асинхронной машины Ротор состоит из стального вала, сердечника и обмотки. Получили распространение два типа обмотки: фазная и короткозамкнутая. Фазный ротор имеет трёхфазную обмотку, соединённую звездой. Выводы обмоток соединены с контактными кольцами закреплёнными на валу. Контактные кольца через щётки подключаются к реостату.

Конструкции ротора асинхронной машины

Асинхронная машина с фазным ротором

Вращающееся магнитное поле трёхфазного тока По графику, в промежуток времени от 0 до t 1 ток в фазе А возрастает от 0 до Im с положительным знаком. В фазе В ток отрицательный и к моменту t 0 ток в фазе С также имеет отрицательный знак. Фаза токов меняется в момент времени t 1.

Вращающееся магнитное поле трёхфазного тока

Вращающееся магнитное поле трёхфазного тока Обозначив на рис. 3. 7 положительное направление тока в фазах (+), а отрицательное (. ), то для каждого момента времени получим картину распределения магнитного поля в момент t 0. Ось результирующего магнитного поля расположена горизонтально ( рис. 3. 7 а ). Момент времени t 1 соответствует изменению фазы тока на угол a 1 = 600. При частоте тока w = 2 pf угол a = wt. В момент t 1 и t 2 ось магнитного поля повернётся на углы a 2 = wt 2 и a 3 = wt 3 За время равное периоду Т, ось поля совершит полный оборот. Угол поворота составит a. T=w T = 2 pf 1.

Принцип действия асинхронного двигателя Принцип действия А. Д. основан на взаимодействии вращающегося магнитного поля статора, с токами индуктированными этим полем в обмотке ротора. Частота вращения магнитного поля статора: n 1 = 60 f 1/p. Ротор вращается с меньшей скоростью n < n 1. При этом n = n 1 ( 1 – S ). Где называется скольжением. Частота тока ротора Где ns = n 1 – n.

ЗАДАЧА Задача 1 А. Трёхфазный асинхронный электродвигатель с числом пар полюсов р = 1. Частота питающей сети f 1= 50 Гц. Определить синхронную частоту n 1 и угловую частоту Ω 1 вращения вращающегося магнитного поля.

Режимы работы трёхфазной асинхронной машины. Скольжение Режим работы асинхронной машины можно характеризовать скольжением. Скольжением называется отношение разности n 1 -n к n 1, т. е. Где n 1 - частота вращения поля статора, n- частота вращения ротора при нагрузке.
 асинхронная машина преобразует")
Режимы работы трёхфазной асинхронной машины. Скольжение В режиме двигателя ( 0<S<1) асинхронная машина преобразует эл. энергию в механическую Ротор вращается медленнее поля, токи ротора взаимодействуя с полем статора образуют вращающий момент уравновешивающий тормозной момент и нагрузку на валу. В режиме генератора (S<0) ротор вращается с большей частотой, чем поле статора в направлении вращения поля. В режиме электромагнитного тормоза (S>!) ротор вращается противоположно вращению поля. Большая часть энергии рассеивается в обмотках из-за гистерезиса и вихревых токов. Режим осуществляется пртивовключением.

ЗАДАЧА Задача 2 А. Трёхфазный асинхронный электродвигатель с числом пар полюсов р = 2. Частота питающей сети f 1= 50 Гц. Номинальное скольжение ротора sном= 0, 05. О п р е д е л и т ь: частоту вращения ротора n 2 ном. Ответ. n 2 ном= 1425 об/мин .

Асинхронный двигатель Теория рабочего процесса Вращающий момент определяется по формуле: M = CMФI 2 SCosy 2 Где - величина постоянная. R 2 , X 2 S – активное и реактивное сопротивления фазы ротора. Момент в относительных единицах: Где MK = KMMHOM – критический момент. KM= 1, 7– 3, 4– кратность максимального момента SK= R 2’/X 2’ – критическое скольжение.

Асинхронный двигатель Теория рабочего процесса Вращающий момент выраженный через максимальный момент и критическое скольжение: Зависимость момента от полезной мощности М(Р 2) определяется выражением: М = 975 Р 2/n 2, к. Гм, или М = 9550 Р 2/n 2, Н*м. Критический момент: Мкр= Км. Мном, где Км- кратность максимального момента. Критическое скольжение: Sк= R’ 2/X’ 2.

Теория рабочего процесса. Саморегулирование вращающего момента при изменении нагрузки При изменении нагрузки на валу, автоматически изменяется вращающий момент машины и восстанавливается нарушенное равновесие момента на валу. Установившийся режим с постоянной скоростью вращения возможен только при равенстве моментов на валу, т. е. М = МПР – противодействующий момент. MПР

ЭДС ОБМОТКИ ДВИГАТЕЛЯ. ЭДС обмотки статора Вращающийся магнитный поток наводит ЭДС обмоток статора e 1. Действующее значение ЭДС: E 1= 4, 44 kоб 1 W 1 f 1 Фm. Где kоб 1 - обмоточный коэффициент, W 1 - число витков обмотки статора, kоб 1 W 1 =WЭ - эффективное число витков.

ЭДС обмотки ротора Для неподвижного ротора E 2= 4, 44 k. Об 2 W 2 f 1 Фm. В неподвижном роторе частота ЭДС: f 2 = f 1, т. е. как и у ЭДС статора. Для вращающегося ротора: E 2 S= 4, 44 k. Об 2 W 2 f 2 Фm. Учитывая, что f 2=Sf 1, получим: E 2 S= 4, 44 k. Об 2 W 2 Sf 1 Фm= SE 2. При скольжении S%= 0, 02– 0, 08%; E 2 S=(0, 020, 08)E 2. Индуктивные сопротивления: для вращающегося ротора X 2 S=W 2 L 2=2πf 1 SL 2, для неподвижного ротора X 2=2πf 1 L 2 , т. е. X 2 S=SX 2.

ЗАДАЧА Задача 5 А. Трёхфазный асинхронный электродвигатель при неподвижном состоянии и номинальной нагрузке. . Частота питающей сети f 1= 50 Гц. Магнитный поток Фm = 15*105 Мкс. Число витков обмоток статора и ротора: w 1 = 200, w 2 = 20. Номинальное скольжение ротора sном= 0, 05. Определить ЭДС в фазах статора и ротора, Е 1, Е 2 и частоту тока в роторе f 2. Ответ: Е 1= 625 В, Е 2 = 63, 8 В, ЭДС в обмотке ротора при номинальной нагрузке (т. е. при sном) Е 2 s = 3, 19 В. Частота тока в роторе при номинальной нагрузке (при s = sном) f 2 s = 2, 5 Гц. , при неподвижном роторе (т. е. при пуске, s = 1), f 2 пуск = 50 Гц.

Уравнения электрического состояния асинхронной машины. Уравнение 2 -го закона Кирхгофа для обмотки статора: U 1= E 1+ R 1 I 1+ j. Х 1 I 1. Для вращающегося ротора приведенного к числу витков статора: SE 2’=R 2’I 2’+ j. SX 2’I 2’ , или E 2’= I 2’R 2’/S + j. X 2’I 2’. Преобразуем , тогда аналогично ур-ю для вторичной обмотки трансформатора.

Схема замещения А. Д. Величина соответствует сопротивлению нагрузки ZH. При токе I 2’ , мощность на валу. двигателя Pмех= (I 2’)2 R 2’ Если пренебречь IX , то ток потребляемый двигателем из сети: I 1=I 2’=
 При S= 0 и M= 0, идеальный холостой ход. При МНОМ")
Механическая характеристика M(S) При S= 0 и M= 0, идеальный холостой ход. При МНОМ , SНОМ – номинальный режим. ОН – рабочая часть характеристики, S = 0 – 0, 08 и M = const. НК –участок механической перегрузки. ОК – участок статической устойчивости. КП – участок неустойчивой работы. При S > 1 – тормозной режим.
 Все точки хар – ки аналогичны точкам на характеристике M(S). Характеристика")
Механическая характеристика n(M) Все точки хар – ки аналогичны точкам на характеристике M(S). Характеристика наз. жёсткой, так как в пределах от идеального х. х. до номинальной нагрузки частота ротора падает не более чем на 10%.
 определяется из М = 9550 Р 2 /n")
Рабочие характеристики асинхронного двигателя М(Р 2) определяется из М = 9550 Р 2 /n 2 , cos j 1( Р 2) определяется Работа А. Д. при малой нагрузке невыгодна изза малого значения коэффициента мощности.

Активная мощность и потери Мощность, потребляемая двигателем из сети P 1 = m 1 U 1 I 1 cosj 1 , где m 1 – количество фаз обмотки статора. Мощность на валу двигателя (полезная) P 2=M 2 w 2 Уравнение энергетического баланса: P 1=P 2+DPЭ 1+DPЭ 2+DPM 1+DPM 2+DPMEX. Где DPЭ 1, DPЭ 2 - электрические потери, DPM 1 , DPM 2 – магнитные потери в обмотках статора и ротора изза гистерезиса и вихревых токов, DPMEX. - механические потери вызваны силами трения. Потери в эл. машинах обычно изучают по энергетическим диаграммам.

Энергетическая диаграмма Мощность, потребляемая двигателем из сети P 1 , отличается от мощности на валу двигателя P 2 на значение мощности потерь в двигателе DP, т. е. Р 1= Р 2 + DP. Чем меньше потери тем больше КПД двигателя. DP,

КПД двигателя Это отношение полезной мощности, к потребляемой мощности из сети, т. е. h = P 2/P 1. Обозначим постоянные потери как: DPC= DPM + DPMEX, а переменные потери DPЭ, то h = P 2/(P 2+ DPC+ DPЭ ), КПД двигателя зависит от нагрузки, поэтому в формулу КПД необходимо включить коэффициент загрузки b = P 2/PHOM. Формула КПД аналогична формуле для трансформатора .

Устройство, принцип действия и режим работы трёхфазных асинхронных машин Тема 2. 1 Основная литература: [1], c. 413 -440, [2], c. 411 -441. Контрольные вопросы: Определение асинхронных машин. Состав (узлы и элементы) асинхронных машин. Классификация асинхронных машин по типу их ротора. Какие явления положены в основу принципа действия асинхронных машин? Способы соединения обмотки статора трёхфазных асинхронных машин. Что такое скольжение трёхфазных асинхронных машин? Механические характеристики трёхфазных асинхронных машин.

Тема 2. 2 Пуск и регулирование скорости трёхфазного асинхронного двигателя

Пуск асинхронного двигателя При пуске ротор двигателя преодолевает момент нагрузки и момент инерции. Частота вращения растёт от n = 0 до n. Скольжение меняется от SП= 0 до S. Условия пуска: MП= MС и пусковой ток IП должен быть небольшим. Возможны различные способы пуска в зависимости от конструкции ротора, мощности двигателя, характера нагрузки.

Прямой пуск. Непосредственное включение обмотки статора на напряжение сети В первый момент S = 1, а пусковой ток: где I’ 2 П- ток ротора приведенный к току статора I 1 П. По мере разгона скольжение уменьшается кратность K 1= IП/ IНОМ= 5 ÷ 7. Прямой пуск применяется на двигателях до 50 к. Вт. Бросок пускового тока может вызвать большое падение напряжения в сети.

Пуск переключением обмотки статора Применяется для двигателей, работающих нормально при соединении статора « треугольником» . При пуске переключают обмотку на «звезду» . При этом напряжение фазное в меньше линейного, а ток линейный при пуске в 3 раза меньше чем при соединении в «треугольник» . Недостаток: пусковой момент уменьшается в 3 раза, т. к. он пропорционален квадрату фазного напряжения.

Пуск двигателя с фазным ротором Пуск производят ступенчатым переключением пусковых реостатов. a-e, первая ступень пуска, в е выключается первая ступень и момент МП скачком увеличивается до b. b-d, вторая ступенью. В точке d момент скачком увеличивается до с и двигатель выходит на естественную характеристику 3 и в точке f устанавливается МНОМ= const. Недостатки: большие потери в пусковом реостате и высокая стоимость.

Пуск двигателей с улучшенными пусковыми свойствами Все методы пуска основаны на повышении сопротивления цепи ротора. Улучшение пусковых свойств достигается использованием эффекта вытеснения тока в обмотке ротора за счёт специальной конструкции ротора. Ротор с глубоким пазом. Глубина паза в 10 раз больше ширины. При пуске ток проходит по наружному слою, т. е. по меньшему сечению так как индуктивное сопротивление глубинной части обмотки велико. Происходит «вытеснение» тока в верхнюю часть стержня. В нормальном режиме частота тока в обмотке ротора мала, процесс «вытеснения» отсутствует, активное сопротивление обмотки уменьшается.

Пуск двигателей с улучшенными пусковыми свойствами. Ротор с двойной «беличьей клеткой» . Верхняя клетка выполнена из латуни, нижняя – из меди и имеет большое сечение. В момент пуска ток вытесняется в верхнюю, латунную клетку (пусковую) с большим активным сопротивлением. В установившемся режиме работает нижняя, рабочая клетка с малым активным сопротивлением. Пусковой момент может увеличиваться в три раза. Пусковой ток в три – четыре раза больше чем номинальный.

Регулирование частоты вращения асинхронного двигателя Частота вращения определяется по формуле: Следовательно, частоту вращения можно изменять , меняя частоту, скольжение и число пар полюсов. Частотное регулирование. Применяются машинные или полупроводниковые преобразователи. Регулирование изменением числа пар полюсов. Двигатель выполняют с двумя катушками в каждой фазе и переключают на последовательное Р=2 или параллельное Р=1 соединение.
![Тема 2. 2 Пуск и регулирование скорости трёхфазного асинхронного двигателя Основная литература: [1], c.](https://present5.com/presentation/87559740_234223040/image-92.jpg "Тема 2. 2 Пуск и регулирование скорости трёхфазного асинхронного двигателя Основная литература: [1], c.")
Тема 2. 2 Пуск и регулирование скорости трёхфазного асинхронного двигателя Основная литература: [1], c. 443 -450, [2], c. 443 -452. Контрольные вопросы: 1. Способы пуска трёхфазных асинхронных двигателей. 2. Пуск трёхфазного асинхронного двигателя с фазным ротором. 3. Способы регулирования скорости трёхфазных асинхронных двигателей. 4. Способы регулирования частоты вращения магнитного поля статора. +

Тема 2. 3 Понятие о работе трёхфазных асинхронных машин в режимах генератора и электромагнитного тормоза. Одно- и двухфазные асинхронные двигатели. Синхронные машины.

Однофазные асинхронные двигатели Имеют небольшую мощность 1 -600 Вт. Применяют в бытовых устройствах, автоматике и т. п. В однофазном двигателе создаётся пульсирующий магнитный поток. МДС статора и ротора равны и противоположны. Ротор будет вращаться если его крутнуть.

Пуск в ход однофазного асинхронного двигателя Пусковая обмотка сдвинута в пространстве на 90 о относительно рабочей. Конденсатор С обеспечивает сдвиг между I и U. После разгона пусковая обмотка отключается. Конденсатор СР создаёт сдвиг между I и U, для получения вращающегося магнитного поля. Конденсатор СП включают при пуске и при большой нагрузке, когда ёмкости СР недостаточно.

Cинхронные машины Электрические машины переменного тока, у которых частота вращения ротора находится в строго постоянном соотношении с частотой электрической сети называются синхронными. Синхронные машины обратимы. В качестве генераторов они применяются на большинстве электростанций всех типов. Синхронные двигатели применяются там, где необходима постоянная частота вращения, а также используются в качестве синхронных компенсаторов.

Синхронный генератор

Устройство синхронных машин

Принцип работы и ЭДС синхронного генератора Принцип работы основан на явлении электромагнитной индукции. При х. х. магнитное поле создаётся только обмоткой возбуждения ротора ( Рис. а. ). При вращении ротора с постоянной частотой no , магнитное поле ротора наводит в обмотках статора ЭДС e = Bl. U. Где B – индукция в воздушном зазоре распределяется по синусоидальному закону B = Bm sina. Где a- угол от нейтральной линии.
. ЭДС в одном проводнике E= Bl. U=Bm.")
Принцип работы и ЭДС синхронного генератора (продолжение). ЭДС в одном проводнике E= Bl. U=Bm. Usina. Обозначив Bm. U = Em то e = Emsina т. е. изменяется по синусоидальному закону. ЭДС отдельных проводников каждой обмотки статора суммируются геометрически. Действующее значение ЭДС одной фазы: E 0= 4, 44 kобfw. Ф 0 m, , где kоб – обмоточный коэффициент; f = pn 0/60 – частота синусоидальной ЭДС; w - число витков одной фазы; p- число пар полюсов; Ф 0 m- максимальный магнитный поток полюса ротора; n – синхронная частота вращения ротора. Изменяя ток IB можно регулировать Ф 0 m и E.

Принцип действия и вращающий момент синхронного двигателя Принцип действия двигателя основан на явлении притяжения разноимённых полюсов двух магнитных полей – статора и ротора. Если поле статора вращается с частотой n 0 , а ротор вращается в том же направлении, то при достижении равных частот произойдёт «сцепление» разноимённых полюсов.
. При идеальном х. х. (MC=0) оси")
Принцип действия и вращающий момент синхронного двигателя (продолжение). При идеальном х. х. (MC=0) оси магнитных полей совпадают рис. а. На полюса действуют радиальные силы F 1 и F 2 которые не создают ни вращающегося момента ни момента МС. Механическая нагрузка на валу создаёт момент сопротивления МС, ось ротора сместится на угол Q и поле статора поведёт за собой м. поле ротора и сам ротор. Тангенциальные составляющие FT сил F создают вращающий момент M=2 F 1 R. В режиме двигателя М = МС. При увеличении механической нагрузки, угол Q увеличивается и возрастает вращающий момент M = 2 F 1 R = 2 FRsin. Q но частота ротора n 0 остаётся неизменной.
![Тема 2. 3 Основная литература: c. 451 -458, [2], c. 452 -457. [1], Контрольные](https://present5.com/presentation/87559740_234223040/image-103.jpg "Тема 2. 3 Основная литература: c. 451 -458, [2], c. 452 -457. [1], Контрольные")
Тема 2. 3 Основная литература: c. 451 -458, [2], c. 452 -457. [1], Контрольные вопросы: 1. Условие перевода трёхфазных асинхронных машин в режим генератора. 2. Условие и способ перевода трёхфазной асинхронной машины в режим электромагнитного тормоза. 3. Отличительные особенности устройства однофазных асинхронных двигателей. 4. Отличие одно- и двухфазных асинхронных двигателей. 5. Определение трёхфазных синхронных машин. 6. Отличительные особенности устройства синхронных машин. 7. Режимы работы синхронных машин и их области применения.

Тема 3. Электронные устройства Тема 3. 1 Компоненты электронных цепей. Тема 3. 2 Усилители электрических сигналов. Тема 3. 3 Логические элементы, триггеры и оптоэлектронные устройства.

Тема 3. 1 Компоненты электронных цепей. Классификация полупроводниковых приборов Полупроводниковыми называют приборы, работа которых основана на использовании свойств полупроводников. Классификация полупроводниковых приборов приведена на рисунке 3. 1. Рис. 3. 1

Тема 3. 1 Компоненты электронных цепей. Классификация полупроводниковых приборов По функциональному назначению полупроводниковые приборы разделяют на: 1. Преобразовательные установки – выпрямители, инверторы, преобразователи тока, напряжения, частоты и др. 2. Усилительные установки – тока, напряжения, частоты и т. д. 3. Импульсные и логические устройства – на их основе создаются различные системы управления.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Рис. 3. 2. Классификация и условные графические обозначения полупроводниковых резисторов
 Полупроводниковым резистором")
Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы (см. рис. 3. 2) Полупроводниковым резистором называют полупроводниковый прибор с двумя выводами, в которых используется зависимость электрического сопротивления от напряжения, температуры и других управляющих факторов. Линейный резистор – полупроводниковый резистор, в котором применяется слаболегированный материал типа кремния или арсенида галлия. Его сопротивление практически не изменяется в широком диапазоне напряжений и токов

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Варистор полупроводниковый резистор, сопротивление которого зависит от приложенного напряжения. Варистор состоит из конгломерата зёрен карбида кремния. (рис. 1. ). Зёрна карбида кремния скрепляют глинистой связкой и называют тирит, а скреплённые жидким стеклом, называют вилит.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Электропроводность варистора обеспечивается многими параллельными цепочками (контактами между зёрнами). Коэффициент нелинейности для различных типов: Варикап – конденсатор на основе полупроводников с р – n переходом. В зависимости от приложенного напряжения ёмкость конденсатора изменяется.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Терморезистор – полупроводниковый резистор в котором используется зависимость электрического сопротивления п. п. от температуры. Два типа терморезисторов: 1. Термисторы – с увеличением температуры R падает. 2. Пазисторы – с увеличением температуры R растёт. Электрическое сопротивление терморезистора: RI =Keβ/T где К – коэффициент, зависит от конструкции тер – а, β – зависит от концентрации примесей в полупроводнике, Т – абсолютная температура. Температурный коэффициент сопротивления терморезистора:

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Тензорезистор – полупроводниковый резистор, электрическое сопротивление которого зависит от механических деформаций. Материал- кремний с электропроводностью типа р или п. Номинальное сопротивление Rном= 100 – 500 Ом. Коэффициент тензочувствительности и деформационные характеристики на рис.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые резисторы Фоторезистор- полупроводниковый резистор, сопротивление которого зависит от освещённости. Фотопроводимость впервые была обнаружена у селена в 1873 г. У. Смитом. При освещении ток в цепи с фоторезистором возрастает, при отсутствии освещения протекает темновой ток очень небольшой. Разность тока при наличии и отсутствии освещения называют световым током или фототоком.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые ДИОДЫ Классификация диодов.

Тема 3. 1 Компоненты электронных цепей. Полупроводниковые ДИОДЫ Диоды выпрямительные применяют для выпрямления переменного тока. Плоскостные диоды применяют в силовых выпрямителях где прямой ток до 1000 А. и обратное напряжение до 1500 В. Точечные диоды рассчитаны на небольшой прямой ток и малую межэлектронную ёмкость. Применяются при высоких частотах. Для увеличения Uобр. диоды включают последовательно. Выпускают диодные столбы – от 5 до 50 диодов. Для увеличения прямого тока диоды соединяют параллельно. Стабилитроны (опорные диоды), применяются для стабилизации напряжения.

Тема 3. 1 Компоненты электронных цепей. Биполярные транзисторы Классификация и условные обозначения.

Тема 3. 1 Компоненты электронных цепей. Биполярные транзисторы Биполярным транзистором называют электро – преобразовательный прибор, состоящий из трёх областей с чередующимися типами электро проводности, пригодной для усиления мощности. Ток в транзисторе определяется движением носителей заряда двух типов: электронов и дырок.

Тема 3. 1 Компоненты электронных цепей. Биполярные транзисторы Четыре режима работы биполярного транзистора: 1. активный режим, в котором переход эмиттер – база включён в прямом направлении, а коллектор – база - в обратном; 2. инверсный режим, в котором переход эмиттер – база включён в обратном направлении, а переход коллектор – база - в прямом; 3. режим отсечки, в котором оба перехода включены в обратном направлении; 4. режим насыщения, в котором оба перехода включены в прямом направлении.

Тема 3. 1 Компоненты электронных цепей. Полевые транзисторы Классификация и условные графические обозначения полевых транзисторов
 и схема включения полевого")
Тема 3. 1 Компоненты электронных цепей. Полевые транзисторы Структура (а) и схема включения полевого транзистора с затвором в виде p – n –перехода (б).

Тема 3. 1 Компоненты электронных цепей. ТИРИСТОРЫ.
![Тема 3. 1 Компоненты электронных цепей Основная литература: [2], c. 239 -253. Дополнительная литература:](https://present5.com/presentation/87559740_234223040/image-122.jpg "Тема 3. 1 Компоненты электронных цепей Основная литература: [2], c. 239 -253. Дополнительная литература:")
Тема 3. 1 Компоненты электронных цепей Основная литература: [2], c. 239 -253. Дополнительная литература: [1], c. 19 -42, 178 -183, [2], c. 46 -123. Контрольные вопросы: 1. Классификация полупроводниковых приборов: резисторов, диодов, биполярных транзисторов, полевых транзисторов, тиристоров. 2. Графические обозначения полупроводниковых приборов. 3. Свойства и характеристики полупроводниковых приборов: резисторов, диодов, биполярных транзисторов. Полевых транзисторов, тиристоров. 4. Структура и схема однофазных выпрямителей.

Тема 3. 2 Усилители электрических сигналов Определение усилителя Усилитель – устройство, увеличивающее мощность (напряжение, силу тока) входного сигнала за счёт энергии внешних источников питания посредством усилительных элементов (полупроводниковых приборов, электронных ламп и др. ) Различают усилители: мощности, напряжения и тока. Усилители постоянного тока fн = 0 Гц. fв = 103 - 108 Усилители низких частот fн = 20 – 50 Гц. fв = 104 - 2*104 Усилители высоких частот fн = 104 -105 Гц. fв = 107 -108 Гц. Широкополосный усилитель fн = 20 – 50 Гц. fв = 107 -108 Гц

Тема 3. 2 Усилители электрических сигналов Усилители на биполярных транзисторах Схема усилительного каскада с общим эмиттером (каскад ОЭ) +Е – для транзисторов типа np-n, а для усилителей с транзистором типа p-n-p -E. Уравнение электрического состояния для коллекторной цепи по 2 му закону Кирхгофа: EK= UK + RKIK т. е. эта сумма всегда равна постоянной величине – ЭДС ЕК. С-для подачи переменной сос. в цепь базы. Сс- выделяет переменную состав. в Rн.

Тема 3. 2 Усилители электрических сигналов Усилители на биполярных транзисторах Схема усилительного каскада с общим коллектором Схема усилительного каскада с общей базой

Тема 3. 2 Усилители электрических сигналов Усилители на полевых транзисторах Различают три типа усилителей на п. т. : с общим затвором (ОЗ), с общим истоком (ОИ), и с общим стоком (ОС). На рисунке схема усилительного каскада с общим истоком
![Тема 3. 2 Усилители электрических сигналов Основная литература: [2], c. 273 -287. Дополнительная литература:](https://present5.com/presentation/87559740_234223040/image-127.jpg "Тема 3. 2 Усилители электрических сигналов Основная литература: [2], c. 273 -287. Дополнительная литература:")
Тема 3. 2 Усилители электрических сигналов Основная литература: [2], c. 273 -287. Дополнительная литература: [1], c. 100 -165, [2], c. 215 -277, 333 -353. Контрольные вопросы: 1. Определение усилителя электрических сигналов. 2. Схемы усилителей на биполярных транзисторах: с общим эмиттером; с общей базой; с общим коллектором. 3. Свойства усилителей на биполярных транзисторах. 4. Схемы и свойства усилителей на полевых транзисторах. 5. Понятие о многокаскадных усилителях. 6. Усилители постоянного тока и операционные усилители. 7. Усилители в интегральном исполнении.
![Тема 3. 3 Логические элементы, триггеры и оптоэлектронные устройства Основная литература: [2], c. 301](https://present5.com/presentation/87559740_234223040/image-128.jpg "Тема 3. 3 Логические элементы, триггеры и оптоэлектронные устройства Основная литература: [2], c. 301")
Тема 3. 3 Логические элементы, триггеры и оптоэлектронные устройства Основная литература: [2], c. 301 -304, 310 -313, 318 -323. Дополнительная литература: [1], c. 242 -258, [2], c. 534585. Контрольные вопросы: 1. Назначения и обозначения: логических элементов; триггеров; оптоэлектронных устройств. 2. Выполняемые функции логических элементов. 3. Типы триггеров. 4. Отличительная особенность и схемы оптоэлектронных устройств. 5. Обозначение и структура микропроцессоров.
ЭЛ.ОБОРУДОВАНИЕ доп..ppt