

ОСНОВЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.pptx
- Количество слайдов: 68
 ОСНОВЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ОСНОВЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
 Введение Теория автоматического управления представляет собой единую научную базу для решения задач управления объектами различной природы (физической, химической, биологической и т. п. ), имеющую развитые методы исследования систем автоматического управления (САУ) — их анализа и синтеза (расчета и проектирования).
Введение Теория автоматического управления представляет собой единую научную базу для решения задач управления объектами различной природы (физической, химической, биологической и т. п. ), имеющую развитые методы исследования систем автоматического управления (САУ) — их анализа и синтеза (расчета и проектирования).
 ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ • Автоматика — отрасль науки и техники, охватывающая совокупность методов и технических средств, освобождающих человека от непосредственного выполнения операций по контролю и управлению производственными процессами и техническими устройствами. Автоматика — это древнегреческое слово, обозначающее самоусиление, самодействие, от слов «ауто» — сам и «матос» — усиление. • Кибернетика — наука об общих закономерностях процессов управления в различных системах (в технике, химии, биологии и т. д. ).
ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ • Автоматика — отрасль науки и техники, охватывающая совокупность методов и технических средств, освобождающих человека от непосредственного выполнения операций по контролю и управлению производственными процессами и техническими устройствами. Автоматика — это древнегреческое слово, обозначающее самоусиление, самодействие, от слов «ауто» — сам и «матос» — усиление. • Кибернетика — наука об общих закономерностях процессов управления в различных системах (в технике, химии, биологии и т. д. ).
 • Техническая кибернетика — наука об общих закономерностях процессов управления в различных технических системах. • Автоматизация — замена умственной деятельности человека работой автоматических устройств. • Механизация — замена мускульной физической силы человека работой технических устройств, позволяющих в нужном направлении изменять технологический процесс, влияя на его параметры и регулируя их в нужном направлении.
• Техническая кибернетика — наука об общих закономерностях процессов управления в различных технических системах. • Автоматизация — замена умственной деятельности человека работой автоматических устройств. • Механизация — замена мускульной физической силы человека работой технических устройств, позволяющих в нужном направлении изменять технологический процесс, влияя на его параметры и регулируя их в нужном направлении.
 • Управление — процесс, обеспечивающий необходимое по целевому назначению протекание процессов преобразования энергии, вещества и информации, поддержание работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнение. Здесь цель является причиной управления и задающие воздействия определяются на основе знания цели. • Регулирование — частный случай управления, цель которого заключается в обеспечении близости текущих значений одной или нескольких координат объекта управления к их заданным значениям.
• Управление — процесс, обеспечивающий необходимое по целевому назначению протекание процессов преобразования энергии, вещества и информации, поддержание работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнение. Здесь цель является причиной управления и задающие воздействия определяются на основе знания цели. • Регулирование — частный случай управления, цель которого заключается в обеспечении близости текущих значений одной или нескольких координат объекта управления к их заданным значениям.
 — определенное техническое устройство (самолет, станок, паровая турбина и") • Объект управления (регулирования) — определенное техническое устройство (самолет, станок, паровая турбина и т. д. ), для достижения результатов функционирования которого необходимы и допустимы специально организованные воздействия. Объект управления, на который подаются управляющие воздействия, можно назвать управляемым объектом. Объектами управления (ОУ) могут быть как отдельные объекты, выделенные по определенным признакам (например, конструктивным, функциональным), так и совокупности объектов — комплексы. В зависимости от свойств или назначения объектов могут быть выделены технические, технологические, экономические, организационные, социальные и другие объекты управления и комплексы.
• Объект управления (регулирования) — определенное техническое устройство (самолет, станок, паровая турбина и т. д. ), для достижения результатов функционирования которого необходимы и допустимы специально организованные воздействия. Объект управления, на который подаются управляющие воздействия, можно назвать управляемым объектом. Объектами управления (ОУ) могут быть как отдельные объекты, выделенные по определенным признакам (например, конструктивным, функциональным), так и совокупности объектов — комплексы. В зависимости от свойств или назначения объектов могут быть выделены технические, технологические, экономические, организационные, социальные и другие объекты управления и комплексы.
 • Цель управления в технических системах — определенные значения или соотношения значений координат процессов в объекте управления или их изменение во времени, при которых обеспечивается • достижение желаемых результатов функционирования объекта. • Управляющее воздействие — воздействие на объект управления, предназначенное для достижения цели управления. • Система автоматического управления —- система, состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс. • Устройство управления (УУ) или регулятор — совокупность устройств, с помощью которых осуществляется управление главным технологическим параметром (физической величиной).
• Цель управления в технических системах — определенные значения или соотношения значений координат процессов в объекте управления или их изменение во времени, при которых обеспечивается • достижение желаемых результатов функционирования объекта. • Управляющее воздействие — воздействие на объект управления, предназначенное для достижения цели управления. • Система автоматического управления —- система, состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс. • Устройство управления (УУ) или регулятор — совокупность устройств, с помощью которых осуществляется управление главным технологическим параметром (физической величиной).
 Регулятор или УУ в САУ воздействует на объект управления и обозначается в функциональных схемах в виде, представленном на рис. 1. 1 Рис1. 1
Регулятор или УУ в САУ воздействует на объект управления и обозначается в функциональных схемах в виде, представленном на рис. 1. 1 Рис1. 1
 воздействия, которые, воздействуя на ОУ, поддерживают на заданном") • Регулятор вырабатывает управляющие (регулирующие) воздействия, которые, воздействуя на ОУ, поддерживают на заданном уровне или изменяют по определенному закону выходную величину. • Внешние воздействия — задающие воздействия g, определяющие требуемый закон (алгоритм) регулирования выходной величины ОУ, и возмущающие воздействия I, нарушающие требуемую функциональную связь между выходной величиной ОУ и задающим воздействием. • Выходной величиной (координатой) ОУ y(t) или регулируемой (управляемой) величиной является обычно главный технологический параметр (скорость, мощность, напряжение и т. д. ).
• Регулятор вырабатывает управляющие (регулирующие) воздействия, которые, воздействуя на ОУ, поддерживают на заданном уровне или изменяют по определенному закону выходную величину. • Внешние воздействия — задающие воздействия g, определяющие требуемый закон (алгоритм) регулирования выходной величины ОУ, и возмущающие воздействия I, нарушающие требуемую функциональную связь между выходной величиной ОУ и задающим воздействием. • Выходной величиной (координатой) ОУ y(t) или регулируемой (управляемой) величиной является обычно главный технологический параметр (скорость, мощность, напряжение и т. д. ).
 САУ, затрудняющее, как") • Возмущение — внешнее воздействие на любое звено (элемент, подсистему) САУ, затрудняющее, как правило, достижение цели управления. Обычно выделяют основные возмущения, существенно влияющие на регулируемую величину, и помехи. • Задающее воздействие g(t) — воздействие на устройство управления, предназначенное для достижения цели управления. • Помехи — возмущения, вызывающие искажение сигналов в САУ, обычно незначительно влияющие на регулируемую величину и труднодоступные для измерения n(t).
• Возмущение — внешнее воздействие на любое звено (элемент, подсистему) САУ, затрудняющее, как правило, достижение цели управления. Обычно выделяют основные возмущения, существенно влияющие на регулируемую величину, и помехи. • Задающее воздействие g(t) — воздействие на устройство управления, предназначенное для достижения цели управления. • Помехи — возмущения, вызывающие искажение сигналов в САУ, обычно незначительно влияющие на регулируемую величину и труднодоступные для измерения n(t).
 • САУ разомкнутые и замкнутые. Разомкнутые САУ — это системы, в которых заданное значение выходной величины ОУ достигается при помощи регулирующего (исполнительного) органа, устанавливаемого в определенное положение; при этом значение выходной величины ОУ может существенно отклоняться от его заданного значения в силу влияния внешних параметров окружающей среды, а также изменения внутренних свойств ОУ, параметров САУ. Вследствие этого возникает необходимость автоматического поддержания выходной величины на заданном уровне; эта задача решается с помощью замкнутой САУ. В случаях, когда не требуется высокая точность поддержания заданного значения выходной величины САУ y(t), замкнутая система может применяться с использованием человека-оператора.
• САУ разомкнутые и замкнутые. Разомкнутые САУ — это системы, в которых заданное значение выходной величины ОУ достигается при помощи регулирующего (исполнительного) органа, устанавливаемого в определенное положение; при этом значение выходной величины ОУ может существенно отклоняться от его заданного значения в силу влияния внешних параметров окружающей среды, а также изменения внутренних свойств ОУ, параметров САУ. Вследствие этого возникает необходимость автоматического поддержания выходной величины на заданном уровне; эта задача решается с помощью замкнутой САУ. В случаях, когда не требуется высокая точность поддержания заданного значения выходной величины САУ y(t), замкнутая система может применяться с использованием человека-оператора.
 • В замкнутой САУ так же, как и в разомкнутой системе, производится измерение текущего значения y(t). Однако здесь заданное значение сравнивается с текущим значением y(t), поступающим через элемент обратной связи (ЭОС) на специальный элемент сравнения (ЭС), который вырабатывает сигнал ошибки САУ; последний обычно усиливается в САУ до значения, достаточного для управления исполнительным механизмом (ИМ), приводящим в движение регулирующий орган ОУ. Следовательно, замкнутая САУ — это система с обратной связью.
• В замкнутой САУ так же, как и в разомкнутой системе, производится измерение текущего значения y(t). Однако здесь заданное значение сравнивается с текущим значением y(t), поступающим через элемент обратной связи (ЭОС) на специальный элемент сравнения (ЭС), который вырабатывает сигнал ошибки САУ; последний обычно усиливается в САУ до значения, достаточного для управления исполнительным механизмом (ИМ), приводящим в движение регулирующий орган ОУ. Следовательно, замкнутая САУ — это система с обратной связью.
 от текущих воздействий на ОУ и от") Обратная связь в САУ — зависимость y(t) от текущих воздействий на ОУ и от его состояния, обусловленного предшествующими воздействиями на объект. Обратная связь может быть естественной (присущей объекту) или искусственно организуемой. При этом различают отрицательную обратную связь (ООС) и положительную обратную величины; ПОС служит для изменения внутренних свойств отдельных звеньев САУ. Сигнал ошибки (рассогласования) в замкнутой САУ определяется как разность между заданным g(t) и текущим y(t) значениями регулируемой величины е(t) = ± [g(t) - y(t)]; может принимать три значения: е(0) = 0 (состояние покоя САУ) и е(t) < 0 или е(t) > 0 (переходной режим САУ).
Обратная связь в САУ — зависимость y(t) от текущих воздействий на ОУ и от его состояния, обусловленного предшествующими воздействиями на объект. Обратная связь может быть естественной (присущей объекту) или искусственно организуемой. При этом различают отрицательную обратную связь (ООС) и положительную обратную величины; ПОС служит для изменения внутренних свойств отдельных звеньев САУ. Сигнал ошибки (рассогласования) в замкнутой САУ определяется как разность между заданным g(t) и текущим y(t) значениями регулируемой величины е(t) = ± [g(t) - y(t)]; может принимать три значения: е(0) = 0 (состояние покоя САУ) и е(t) < 0 или е(t) > 0 (переходной режим САУ).
 ТИПОВАЯ ФУНКЦИОНАЛЬНАЯ СХЕМА САУ • Функциональная схема САУ представляет собой совокупность соединенных определенным образом элементов (звеньев, блоков) системы по выполняемым ими функциям, независимо от их физической природы. • Типовые функциональные схемы САУ представлены на рис. 1. 2, где приняты следующие обозначения (см. рис. 1. 2, а):
ТИПОВАЯ ФУНКЦИОНАЛЬНАЯ СХЕМА САУ • Функциональная схема САУ представляет собой совокупность соединенных определенным образом элементов (звеньев, блоков) системы по выполняемым ими функциям, независимо от их физической природы. • Типовые функциональные схемы САУ представлены на рис. 1. 2, где приняты следующие обозначения (см. рис. 1. 2, а):
 Рис 1. 2
Рис 1. 2
 управления выходной") • ЗЭ — задающий элемент; служит для задания определенного закона (алгоритма) управления выходной величины; обычно это потенциометры, кулачки, магнитные ленты, проволока, нивелир, луч света и т. п. ; • ЭГОС — элемент главной обратной связи (чувствительный элемент, первичный преобразователь — датчик); служит для измерения текущего значения регулируемой величины y(t) и преобразования ее в другого рода yoc(t), удобную для технической реализации схемы; • ЭС — элемент сравнения (выявляющий элемент); служит для выявления разницы между заданным и текущим значениями регулируемой величины и формирует полезный сигнал (сигнал ошибки, сигнал рассогласования);
• ЗЭ — задающий элемент; служит для задания определенного закона (алгоритма) управления выходной величины; обычно это потенциометры, кулачки, магнитные ленты, проволока, нивелир, луч света и т. п. ; • ЭГОС — элемент главной обратной связи (чувствительный элемент, первичный преобразователь — датчик); служит для измерения текущего значения регулируемой величины y(t) и преобразования ее в другого рода yoc(t), удобную для технической реализации схемы; • ЭС — элемент сравнения (выявляющий элемент); служит для выявления разницы между заданным и текущим значениями регулируемой величины и формирует полезный сигнал (сигнал ошибки, сигнал рассогласования);
 • ППЭ — последовательный преобразующий элемент; служит для преобразования сигнала, поступающего с элемента сравнения, в такой сигнал, который позволяет УУ (регулятору) придать системе желаемые динамические свойства; • УЭ — усилительный элемент; служит для усиления поступающего сигнала до значения, достаточного для приведения в действие исполнительного элемента — ИЭ (механизма); • ИЭ — исполнительный элемент; служит для перемещения регулирующего органа О У в направлении компенсации сигнала рассогласования, преобразованного УУ (регулятором);
• ППЭ — последовательный преобразующий элемент; служит для преобразования сигнала, поступающего с элемента сравнения, в такой сигнал, который позволяет УУ (регулятору) придать системе желаемые динамические свойства; • УЭ — усилительный элемент; служит для усиления поступающего сигнала до значения, достаточного для приведения в действие исполнительного элемента — ИЭ (механизма); • ИЭ — исполнительный элемент; служит для перемещения регулирующего органа О У в направлении компенсации сигнала рассогласования, преобразованного УУ (регулятором);
 орган; • ОУ— объект управления — техническое устройство,") • РО — рабочий (регулирующий) орган; • ОУ— объект управления — техническое устройство, преобразующее один вид энергии в другой и совершающее полезную работу; • ПЭВ — преобразовательный элемент возмущения; служит для преобразования основного возмущения в сигнал, воздействующий на УУ; • ЭМОС — элемент местной обратной связи; служит для придания системе требуемых динамических свойств; • ЧЭ — чувствительный элемент; служит для измерения основного возмущения.
• РО — рабочий (регулирующий) орган; • ОУ— объект управления — техническое устройство, преобразующее один вид энергии в другой и совершающее полезную работу; • ПЭВ — преобразовательный элемент возмущения; служит для преобразования основного возмущения в сигнал, воздействующий на УУ; • ЭМОС — элемент местной обратной связи; служит для придания системе требуемых динамических свойств; • ЧЭ — чувствительный элемент; служит для измерения основного возмущения.
 • САУ условно состоит из двух каналов: • канал I — канал прямой связи, содержит все элементы, преобразующие сигнал в одном (прямом) направлении (от ЗЭ к О У); • канал II — канал обратной связи, несет информацию о регулируемых параметрах для сравнения их на входе системы (от ОУ к ЭС).
• САУ условно состоит из двух каналов: • канал I — канал прямой связи, содержит все элементы, преобразующие сигнал в одном (прямом) направлении (от ЗЭ к О У); • канал II — канал обратной связи, несет информацию о регулируемых параметрах для сравнения их на входе системы (от ОУ к ЭС).
 Типичными элементами САУ, относящимися к информационной и энергетической части, являются: • измерители различных физических величин, называемые чувствительными элементами или датчиками, вводящие в систему управления информацию о задачах управления и результатах управления; • функциональные преобразователи или вычислительные устройства (блоки хранения и преобразования информации), осуществляющие определение параметров управления и заданное их преобразование и вырабатывающие сигналы управления; • исполнительные элементы (устройства), непосредственно осуществляющие управление.
Типичными элементами САУ, относящимися к информационной и энергетической части, являются: • измерители различных физических величин, называемые чувствительными элементами или датчиками, вводящие в систему управления информацию о задачах управления и результатах управления; • функциональные преобразователи или вычислительные устройства (блоки хранения и преобразования информации), осуществляющие определение параметров управления и заданное их преобразование и вырабатывающие сигналы управления; • исполнительные элементы (устройства), непосредственно осуществляющие управление.
 • Совокупность элементов функциональной схемы образует замкнутый контур, охватывающий объект управления. Поэтому САУ является замкнутой или системой управления с обратной связью. На рис. 1. 2, б—г приведены упрощенные варианты обозначения функциональных схем САУ.
• Совокупность элементов функциональной схемы образует замкнутый контур, охватывающий объект управления. Поэтому САУ является замкнутой или системой управления с обратной связью. На рис. 1. 2, б—г приведены упрощенные варианты обозначения функциональных схем САУ.
 в") ПРИНЦИПЫ УПРАВЛЕНИЯ И КЛАССИФИКАЦИЯ САУ • В рассматриваемой САУ (см. рис. 1. 2) в качестве основного применяется принцип управления по отклонению, т. е. с помощью чувствительного элемента измеряется текущее значение регулируемого параметра ОУ и определяется в элементе сравнения (ЭС) значение отклонения регулируемого параметра от заданного е(t) = g(t) - yoc(t). • В САУ, кроме того, применяется также принцип управления по возмущению и комбинированный принцип (объединяющий оба принципа) (см. рис. 1. 2, а).
ПРИНЦИПЫ УПРАВЛЕНИЯ И КЛАССИФИКАЦИЯ САУ • В рассматриваемой САУ (см. рис. 1. 2) в качестве основного применяется принцип управления по отклонению, т. е. с помощью чувствительного элемента измеряется текущее значение регулируемого параметра ОУ и определяется в элементе сравнения (ЭС) значение отклонения регулируемого параметра от заданного е(t) = g(t) - yoc(t). • В САУ, кроме того, применяется также принцип управления по возмущению и комбинированный принцип (объединяющий оба принципа) (см. рис. 1. 2, а).
 применяется только принцип управления по возмущению, то") • Если в САУ отдельно (автономно) применяется только принцип управления по возмущению, то САУ при этом считается разомкнутой(по цепи ЭГОС). Эти САУ называются инвариантными по возмущению или просто инвариантными САУ (рис. 1. 3, а, б).
• Если в САУ отдельно (автономно) применяется только принцип управления по возмущению, то САУ при этом считается разомкнутой(по цепи ЭГОС). Эти САУ называются инвариантными по возмущению или просто инвариантными САУ (рис. 1. 3, а, б).
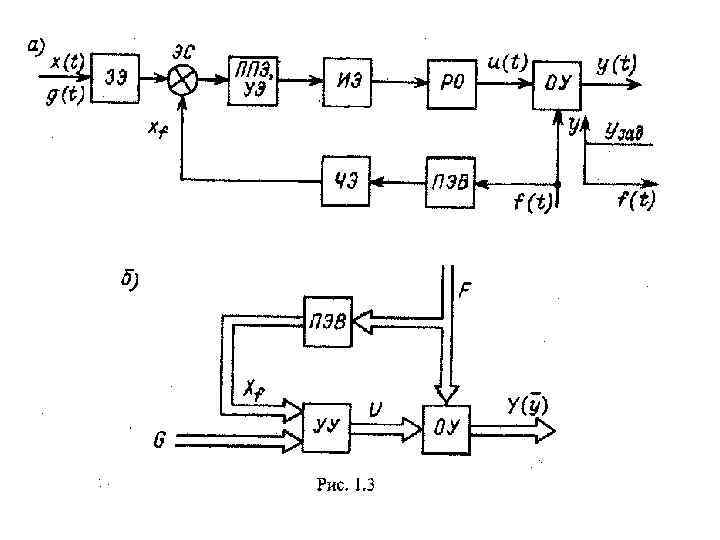
 • Здесь на рис. 1. 3, а представлен развернутый, а на рис. 1. 3, б — упрощенный вариант обозначения схемы САУ. • САУ, работающие по принципу управления по отклонению, имеют преимущества перед САУ, работающими по принципу управления по возмущению, так как в них ведется учет всех возмущений, прикладываемых к САУ в любой ее точке, т. е. на любом из элементов САУ и, кроме того, достигается высокая точность поддержания заданного значения регулируемой величины, а при управлении по принципу возмущения такая точность принципиально не может быть получена.
• Здесь на рис. 1. 3, а представлен развернутый, а на рис. 1. 3, б — упрощенный вариант обозначения схемы САУ. • САУ, работающие по принципу управления по отклонению, имеют преимущества перед САУ, работающими по принципу управления по возмущению, так как в них ведется учет всех возмущений, прикладываемых к САУ в любой ее точке, т. е. на любом из элементов САУ и, кроме того, достигается высокая точность поддержания заданного значения регулируемой величины, а при управлении по принципу возмущения такая точность принципиально не может быть получена.
 • Комбинированный принцип управления объединяет оба принципа: управление по отклонению и по возмущению; этот принцип называют также компаундированным по возмущению. • Исторически сначала были разработаны первые САУ, работающие по отклонению, а затем вторые. Впервые САУ, работающая по отклонению, была внедрена • И. Ползуновым в 1765 г. для регулирования объема воды в котлах (поплавковый регулятор). Принцип управления по возмущению был впервые применен Понселе в • 1830 г. для регулирования скорости паровой машины (в центральном регуляторе скорости Уатта) и был впоследствии назван принципом Понселе—Чиколева (1874 г. ). Русский ученый Чиколев впервые применил этот принцип для регулирования тока в осветительной нагрузке от генератора постоянного тока с независимым возбуждением.
• Комбинированный принцип управления объединяет оба принципа: управление по отклонению и по возмущению; этот принцип называют также компаундированным по возмущению. • Исторически сначала были разработаны первые САУ, работающие по отклонению, а затем вторые. Впервые САУ, работающая по отклонению, была внедрена • И. Ползуновым в 1765 г. для регулирования объема воды в котлах (поплавковый регулятор). Принцип управления по возмущению был впервые применен Понселе в • 1830 г. для регулирования скорости паровой машины (в центральном регуляторе скорости Уатта) и был впоследствии назван принципом Понселе—Чиколева (1874 г. ). Русский ученый Чиколев впервые применил этот принцип для регулирования тока в осветительной нагрузке от генератора постоянного тока с независимым возбуждением.
 • Классификационные признаки САУ, характеризующие понятия, относящиеся к принципам управления, можно выделить на основе анализа факторов, определяющих алгоритм или закон управления в САУ, т. е. выработку и реализацию управляющих воздействий. Так, по степени использования информации о состояниях ОУ при управлении САУ подразделяют на САУ с обратной связью и без обратной связи; по степени использования при управлении информации о возмущениях — САУ с управлением по возмущению или объединенно-комбинированные САУ. По степени использования при управлении информации о параметрах и структуре ОУ САУ подразделяют на адаптивные САУ: - беспоисковые, с идентификацией; - САУ с переменной структурой; - неадаптивные САУ. По степени определенности (заданности) преобразования координат в системе управления: - САУ детерминированные, - стохастические САУ.
• Классификационные признаки САУ, характеризующие понятия, относящиеся к принципам управления, можно выделить на основе анализа факторов, определяющих алгоритм или закон управления в САУ, т. е. выработку и реализацию управляющих воздействий. Так, по степени использования информации о состояниях ОУ при управлении САУ подразделяют на САУ с обратной связью и без обратной связи; по степени использования при управлении информации о возмущениях — САУ с управлением по возмущению или объединенно-комбинированные САУ. По степени использования при управлении информации о параметрах и структуре ОУ САУ подразделяют на адаптивные САУ: - беспоисковые, с идентификацией; - САУ с переменной структурой; - неадаптивные САУ. По степени определенности (заданности) преобразования координат в системе управления: - САУ детерминированные, - стохастические САУ.
 Вид математической модели преобразований координат в САУ определяет САУ как линейные и нелинейные (релейные, логические и др. ); вид управляющих воздействий — САУ аналоговые (непрерывные) и дискретные (прерывистые, импульсные, цифровые); по степени участия человека-оператора в управлении — САУ ручные, автоматические и автоматизированные (человекоператор в контуре управления). Необходимо отметить, что многие системы управления создаются на основе комплексирования нескольких принципов управления, поэтому допустимы составные определения, например, как цифровое управление с идентификацией и др. Рассмотрим более детально принципы управления, связанные с тем или иным признаком классификации САУ.
Вид математической модели преобразований координат в САУ определяет САУ как линейные и нелинейные (релейные, логические и др. ); вид управляющих воздействий — САУ аналоговые (непрерывные) и дискретные (прерывистые, импульсные, цифровые); по степени участия человека-оператора в управлении — САУ ручные, автоматические и автоматизированные (человекоператор в контуре управления). Необходимо отметить, что многие системы управления создаются на основе комплексирования нескольких принципов управления, поэтому допустимы составные определения, например, как цифровое управление с идентификацией и др. Рассмотрим более детально принципы управления, связанные с тем или иным признаком классификации САУ.

 • Вид математической модели преобразований координат в САУ определяет САУ как линейные и нелинейные (релейные, логические и др. ); • Вид управляющих воздействий — САУ аналоговые (непрерывные) и дискретные (прерывистые, импульсные, цифровые); • по степени участия человека-оператора в управлении — САУ ручные, автоматические и автоматизированные (человек-оператор в контуре управления). • Необходимо отметить, что многие системы управления создаются на основе комплексирования нескольких принципов управления, поэтому допустимы составные определения, например, как цифровое управление с идентификацией и др. • Рассмотрим более детально принципы управления, связанные с тем или иным признаком классификации САУ.
• Вид математической модели преобразований координат в САУ определяет САУ как линейные и нелинейные (релейные, логические и др. ); • Вид управляющих воздействий — САУ аналоговые (непрерывные) и дискретные (прерывистые, импульсные, цифровые); • по степени участия человека-оператора в управлении — САУ ручные, автоматические и автоматизированные (человек-оператор в контуре управления). • Необходимо отметить, что многие системы управления создаются на основе комплексирования нескольких принципов управления, поэтому допустимы составные определения, например, как цифровое управление с идентификацией и др. • Рассмотрим более детально принципы управления, связанные с тем или иным признаком классификации САУ.
 Классификация систем автоматического управления осуществляется по следующим признакам: • 1. По виду задающего сигнала различают: • системы автоматической стабилизации, задающий сигнал в которых g(t) = const (t), а выходной параметр САУ поддерживается на уровне заданного значения (y(t) = const (t)); • системы программного управления, задающий сигнал в которых зависит от задающей программы; например, g(t)= F(t) и соответствует программе задания угла наклона оси ракеты при запуске с переходом от перпендикулярного к горизонтальному движению ракеты; • следящие системы, изменение задающего сигнала в которых происходит по случайному закону, заданному тем или иным способом[например, угол поворота выходного вала следящей системы должен соответствовать задающему углу поворота α(t), здесь ошибка ε(t) = [α(t) - β(t)]. Это различные системы наведения с РЛС, системы телеуправления и самонаведения, автопилоты, целеуказатели курса летательных аппаратов (ЛА) с РЛС и другие САУ движением летательных аппаратов.
Классификация систем автоматического управления осуществляется по следующим признакам: • 1. По виду задающего сигнала различают: • системы автоматической стабилизации, задающий сигнал в которых g(t) = const (t), а выходной параметр САУ поддерживается на уровне заданного значения (y(t) = const (t)); • системы программного управления, задающий сигнал в которых зависит от задающей программы; например, g(t)= F(t) и соответствует программе задания угла наклона оси ракеты при запуске с переходом от перпендикулярного к горизонтальному движению ракеты; • следящие системы, изменение задающего сигнала в которых происходит по случайному закону, заданному тем или иным способом[например, угол поворота выходного вала следящей системы должен соответствовать задающему углу поворота α(t), здесь ошибка ε(t) = [α(t) - β(t)]. Это различные системы наведения с РЛС, системы телеуправления и самонаведения, автопилоты, целеуказатели курса летательных аппаратов (ЛА) с РЛС и другие САУ движением летательных аппаратов.
 функциональной схемы (по степени связности процессов в объекте") • 2. По виду (топологии) функциональной схемы (по степени связности процессов в объекте и степени сложности структуры объекта управления) различают: • одноконтурные САУ — с одной регулируемой величиной (системы включают в себя один канал обратной связи); • многоконтурные САУ с одной регулируемой величиной (включают в себя один канал главной обратной связи и несколько каналов местной обратной связи); • многоконтурные САУ с несколькими регулируемыми величинами (содержат несколько каналов главных обратных связей и также могут быть местные обратные связи) — многомерные САУ;
• 2. По виду (топологии) функциональной схемы (по степени связности процессов в объекте и степени сложности структуры объекта управления) различают: • одноконтурные САУ — с одной регулируемой величиной (системы включают в себя один канал обратной связи); • многоконтурные САУ с одной регулируемой величиной (включают в себя один канал главной обратной связи и несколько каналов местной обратной связи); • многоконтурные САУ с несколькими регулируемыми величинами (содержат несколько каналов главных обратных связей и также могут быть местные обратные связи) — многомерные САУ;
: • многоконтурные несвязанные системы — это") Многомерные САУ подразделяют на (рис. 1. 4, а): • многоконтурные несвязанные системы — это такие системы, в которых УУ (регуляторы) не связаны между собой вне объекта управления; • многоконтурные зависимые системы — это системы, в которых изменение одной величины приводит к изменению других регулируемых величин; • многоконтурные независимые системы — это такие системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин; • многоконтурные связанные системы — это такие системы, в которых УУ (регуляторы) связаны между собой вне объекта управления(рис. 1. 4, б);
Многомерные САУ подразделяют на (рис. 1. 4, а): • многоконтурные несвязанные системы — это такие системы, в которых УУ (регуляторы) не связаны между собой вне объекта управления; • многоконтурные зависимые системы — это системы, в которых изменение одной величины приводит к изменению других регулируемых величин; • многоконтурные независимые системы — это такие системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин; • многоконтурные связанные системы — это такие системы, в которых УУ (регуляторы) связаны между собой вне объекта управления(рис. 1. 4, б);
 • многоконтурные автономные связанные системы — это системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин (обычно за счет искусственных компенсирующих связей); • многоконтурные неавтономные связанные системы — это системы, в которых изменение одной регулируемой величины ведет к изменению других регулируемых величин (рис. 1. 4, в). 3. По воздействию чувствительного (измерительного) элемента на регулирующий орган (РО) различают: система прямого управления (например, с регулятором И. Ползунова), когда непосредственно (прямо) происходит передача воздействия чувствительного элемента (поплавка) на РО (задвижку). Недостатки таких систем: необходимо наличие достаточно большого количества энергии для передачи воздействия ЧЭ на РО; такой энергии часто не имеется. Кроме того, реакция РО на ЧЭ снижает его чувствительность и значительно уменьшает точность работы системы. Поэтому в системах, где необходима повышенная точность к управлению и нет достаточной энергии для прямого регулирования, применяют косвенное управление.
• многоконтурные автономные связанные системы — это системы, в которых изменение одной регулируемой величины не приводит к изменению других регулируемых величин (обычно за счет искусственных компенсирующих связей); • многоконтурные неавтономные связанные системы — это системы, в которых изменение одной регулируемой величины ведет к изменению других регулируемых величин (рис. 1. 4, в). 3. По воздействию чувствительного (измерительного) элемента на регулирующий орган (РО) различают: система прямого управления (например, с регулятором И. Ползунова), когда непосредственно (прямо) происходит передача воздействия чувствительного элемента (поплавка) на РО (задвижку). Недостатки таких систем: необходимо наличие достаточно большого количества энергии для передачи воздействия ЧЭ на РО; такой энергии часто не имеется. Кроме того, реакция РО на ЧЭ снижает его чувствительность и значительно уменьшает точность работы системы. Поэтому в системах, где необходима повышенная точность к управлению и нет достаточной энергии для прямого регулирования, применяют косвенное управление.
 4. По виду зависимости регулируемой величины от внешнего воздействия различают: - статические САУ — это системы, в которых при возмущающем воздействии регулируемая величина у (t) по окончании переходного процесса принимает значения, пропорциональные возмущающему воздействию. Следовательно, статические САУ характеризуются зависимостью выходной величины от внешнего возмущающего воздействия; статическую характеристику САУ оценивают коэффициентом неравномерности, или статизмом, который вычисляется по формуле:
4. По виду зависимости регулируемой величины от внешнего воздействия различают: - статические САУ — это системы, в которых при возмущающем воздействии регулируемая величина у (t) по окончании переходного процесса принимает значения, пропорциональные возмущающему воздействию. Следовательно, статические САУ характеризуются зависимостью выходной величины от внешнего возмущающего воздействия; статическую характеристику САУ оценивают коэффициентом неравномерности, или статизмом, который вычисляется по формуле:
 Достаточными признаками для отнесения систем к классу статических являются следующие: определенному значению внешнего воздействия соответствует одно определенное значение регулируемой величины; регулирующий орган занимает строго соответствующее положение по отношению к регулируемой величине; между чувствительным элементом и ОУ в САУ включаются статические звенья. Статическое звено САУ — это звено, между выходной и входной величинами которого существует строго определенная функциональная связь; графически эта связь является статической характеристикой звена у = F(x);
Достаточными признаками для отнесения систем к классу статических являются следующие: определенному значению внешнего воздействия соответствует одно определенное значение регулируемой величины; регулирующий орган занимает строго соответствующее положение по отношению к регулируемой величине; между чувствительным элементом и ОУ в САУ включаются статические звенья. Статическое звено САУ — это звено, между выходной и входной величинами которого существует строго определенная функциональная связь; графически эта связь является статической характеристикой звена у = F(x);
 астатические САУ— это системы, в которых при внешнем воздействии и окончании переходного процесса значение регулируемой величины устанавливается равным заданному, т. е. в установившемся режиме разность между заданным и текущим значениями регулируемой величины равна нулю (ε = 0). Достаточными признаками астатических систем являются следующие положения: значение регулируемой величины равно заданному независимо от внешнего воздействия; определенному значению регулируемой величины соответствует несколько положений регулирующего органа; между чувствительным элементом и ОУ находится одно или несколько астатических звеньев. Под астатическим звеном понимают звено, в котором выходная величина в установившемся режиме находится в неустойчивом (безразличном) положении равновесия; при внешнем воздействии выходная величина астатического звена выходит из неустойчивого (неопределенного) равновесия и изменяется по строго определенному функциональному закону; характеристика астатического звена имеет статизм δ = 0.
астатические САУ— это системы, в которых при внешнем воздействии и окончании переходного процесса значение регулируемой величины устанавливается равным заданному, т. е. в установившемся режиме разность между заданным и текущим значениями регулируемой величины равна нулю (ε = 0). Достаточными признаками астатических систем являются следующие положения: значение регулируемой величины равно заданному независимо от внешнего воздействия; определенному значению регулируемой величины соответствует несколько положений регулирующего органа; между чувствительным элементом и ОУ находится одно или несколько астатических звеньев. Под астатическим звеном понимают звено, в котором выходная величина в установившемся режиме находится в неустойчивом (безразличном) положении равновесия; при внешнем воздействии выходная величина астатического звена выходит из неустойчивого (неопределенного) равновесия и изменяется по строго определенному функциональному закону; характеристика астатического звена имеет статизм δ = 0.
 на объект управления различают: системы") 5. По виду воздействия регулирующего органа (или ИЭ, УУ) на объект управления различают: системы непрерывного управления (аналоговые), в которых между выходной и входной величинами существует определенная непрерывная функциональная связь у = F(x), где функция является аналитической непрерывной функцией, и системы прерывистого управления (дискретные), в которых функция F(g) является дискретной. Последние подразделяются на системы релейного действия, импульсные и цифровые системы. В системах релейного действия в структуре САУ имеются один или несколько релейных элементов — РЭ (элементов порогового действия, типа 0, 1). У этих элементов при входном сигнале, меньшем Ucp (Ucp — напряжение срабатывания), РЭ отключен и его контакты в цепи, например ИЭ, разомкнуты. При входном сигнале, большем Ucp, РЭ срабатывает и замыкает свой контакт; при этом ИЭ развивает некоторый полезный момент М для перемещения РО ОУ. При уменьшении входного сигнала ниже напряжения отпускания Uoтn контакт РЭ в цепи ИЭ размыкается и его момент М = 0.
5. По виду воздействия регулирующего органа (или ИЭ, УУ) на объект управления различают: системы непрерывного управления (аналоговые), в которых между выходной и входной величинами существует определенная непрерывная функциональная связь у = F(x), где функция является аналитической непрерывной функцией, и системы прерывистого управления (дискретные), в которых функция F(g) является дискретной. Последние подразделяются на системы релейного действия, импульсные и цифровые системы. В системах релейного действия в структуре САУ имеются один или несколько релейных элементов — РЭ (элементов порогового действия, типа 0, 1). У этих элементов при входном сигнале, меньшем Ucp (Ucp — напряжение срабатывания), РЭ отключен и его контакты в цепи, например ИЭ, разомкнуты. При входном сигнале, большем Ucp, РЭ срабатывает и замыкает свой контакт; при этом ИЭ развивает некоторый полезный момент М для перемещения РО ОУ. При уменьшении входного сигнала ниже напряжения отпускания Uoтn контакт РЭ в цепи ИЭ размыкается и его момент М = 0.
 Импульсные САУ характеризуются наличием импульсного элемента в схеме, выходная величина которого представляет собой последовательность импульсов. Амплитуда, длительность и частота следования импульсов являются функцией входной величины. Существует много модификаций импульсных САУ, различающихся по принципу осуществления модуляции входного сигнала: - времяимпульсные, - широтно-импульсные, - амплитудно-импульсные, - САУ с комбинацией этих модуляций. Цифровые САУ — это САУ, в контуре управления которых для реализации алгоритмов управления встроены ЭВМ или цифровые вычислительные устройства. Системы комбинированного типа: - аналого-дискретные, - дискретно-аналоговые или цифроаналоговые, - аналого-цифровые — представляют собой смешанную реализацию рассмотренных выше структур.
Импульсные САУ характеризуются наличием импульсного элемента в схеме, выходная величина которого представляет собой последовательность импульсов. Амплитуда, длительность и частота следования импульсов являются функцией входной величины. Существует много модификаций импульсных САУ, различающихся по принципу осуществления модуляции входного сигнала: - времяимпульсные, - широтно-импульсные, - амплитудно-импульсные, - САУ с комбинацией этих модуляций. Цифровые САУ — это САУ, в контуре управления которых для реализации алгоритмов управления встроены ЭВМ или цифровые вычислительные устройства. Системы комбинированного типа: - аналого-дискретные, - дискретно-аналоговые или цифроаналоговые, - аналого-цифровые — представляют собой смешанную реализацию рассмотренных выше структур.
 6. По характеру звеньев, включаемых в САУ, системы делятся на линейные и нелинейные. Линейные системы включают в себя линейные звенья, характеристики которых имеют следующий вид: y-a+kx (˅a ϵ R), где k =(y-a)/x = tg(φ) —статический коэффициент передачи звена. В линейных системах между выходной y(t) и входной x(t), g(t) величинами существует линейная функциональная зависимость (в статическом и динамическом режимах работы). Процессы, происходящие в этих системах, описываются линейными дифференциальными уравнениями. В зависимости от вида дифференциального уравнения линейные системы подразделяются на следующие типы: 1) обыкновенные САУ, описываемые обыкновенными линейными дифференциальными уравнениями (типа «вход-выход» ):
6. По характеру звеньев, включаемых в САУ, системы делятся на линейные и нелинейные. Линейные системы включают в себя линейные звенья, характеристики которых имеют следующий вид: y-a+kx (˅a ϵ R), где k =(y-a)/x = tg(φ) —статический коэффициент передачи звена. В линейных системах между выходной y(t) и входной x(t), g(t) величинами существует линейная функциональная зависимость (в статическом и динамическом режимах работы). Процессы, происходящие в этих системах, описываются линейными дифференциальными уравнениями. В зависимости от вида дифференциального уравнения линейные системы подразделяются на следующие типы: 1) обыкновенные САУ, описываемые обыкновенными линейными дифференциальными уравнениями (типа «вход-выход» ):
 системы с переменными параметрами; коэффициенты и матрицы коэффициентов в уравнениях являются зависимыми от") 4) системы с переменными параметрами; коэффициенты и матрицы коэффициентов в уравнениях являются зависимыми от времени — это нестационарные системы; такие системы описываются, например, следующими уравнениями:
4) системы с переменными параметрами; коэффициенты и матрицы коэффициентов в уравнениях являются зависимыми от времени — это нестационарные системы; такие системы описываются, например, следующими уравнениями:
 Нелинейные системы — это также любые системы, в которых нарушается линейность уравнений динамики. Все реальные САУ обычно являются нелинейными, но САУ с несущественной нелинейностью характеристик -— линеаризуют.
Нелинейные системы — это также любые системы, в которых нарушается линейность уравнений динамики. Все реальные САУ обычно являются нелинейными, но САУ с несущественной нелинейностью характеристик -— линеаризуют.
 Рис. 1. 5
Рис. 1. 5
. Они не содержат") Несущественно нелинейные характеристики показаны на рис. 1. 5, а (1, 2). Они не содержат разрывов непрерывности. Существенно нелинейные характеристики содержат изломы, разрывы непрерывности первого рода и т. д. [показаны на рис. 1. 5, а (3), б, в, г]. Теория линейных систем в настоящее время полностью разработана, поэтому целесообразно сводить там, где это возможно, нелинейные САУ к линейным, используя методы линеаризации. Однако нелинейные САУ богаче по своим возможностям, в том числе и в смысле улучшения качества процессов. 7. По степени самонастройки, адаптации, оптимизации и интеллектуализации различают: Экстремальные системы (с самонастройкой программы) — это САУ, в которых значение регулируемой величины автоматически поддерживается на экстремальном значении (максимуме, минимуме) при различных значениях возмущающих воздействий J(t), заранее неизвестных (рис. 1. 6).
Несущественно нелинейные характеристики показаны на рис. 1. 5, а (1, 2). Они не содержат разрывов непрерывности. Существенно нелинейные характеристики содержат изломы, разрывы непрерывности первого рода и т. д. [показаны на рис. 1. 5, а (3), б, в, г]. Теория линейных систем в настоящее время полностью разработана, поэтому целесообразно сводить там, где это возможно, нелинейные САУ к линейным, используя методы линеаризации. Однако нелинейные САУ богаче по своим возможностям, в том числе и в смысле улучшения качества процессов. 7. По степени самонастройки, адаптации, оптимизации и интеллектуализации различают: Экстремальные системы (с самонастройкой программы) — это САУ, в которых значение регулируемой величины автоматически поддерживается на экстремальном значении (максимуме, минимуме) при различных значениях возмущающих воздействий J(t), заранее неизвестных (рис. 1. 6).
 определяется автоматически в процессе работы САУ. В САУ добавлено специальное") Здесь программа изменения y(t) определяется автоматически в процессе работы САУ. В САУ добавлено специальное устройство автоматического поиска экстремума (УАПЭ), которое на основе анализа определенных характеристик ОУ выдает на вход САУ воздействие g(t) = g 3. В результате У У (регулятор) вырабатывает управляющее воздействие μ(t) или u(t) определяющее оптимальное поведение САУ при изменении у(t), например работу САУ на экстремальном значении у = утах (рис. 1. 7). Здесь на рис. 1. 7 представлены различные типы экстремальных характеристик ОУ вида y= φ (f) (Рис1. 7, а) или у = φ(х) (рис. 1. 7, б, в), где f, х — соответственно возмущающее и управляющее воздействия; grad. F = 0 -> уэкстр. Обычно при проектировании САУ всегда преследуют экстремальную цель управления. Экстремальные системы по существу являются системами автоматической стабилизации выходной величины уэкстр = const (t) или экстремума некоторого функционала J= F(y, х, у‾, х‾, …f). В последнем случае САУ решают не только задачу экстремального управления, но и задачу оптимизации, т. е. являются оптимальными САУ.
Здесь программа изменения y(t) определяется автоматически в процессе работы САУ. В САУ добавлено специальное устройство автоматического поиска экстремума (УАПЭ), которое на основе анализа определенных характеристик ОУ выдает на вход САУ воздействие g(t) = g 3. В результате У У (регулятор) вырабатывает управляющее воздействие μ(t) или u(t) определяющее оптимальное поведение САУ при изменении у(t), например работу САУ на экстремальном значении у = утах (рис. 1. 7). Здесь на рис. 1. 7 представлены различные типы экстремальных характеристик ОУ вида y= φ (f) (Рис1. 7, а) или у = φ(х) (рис. 1. 7, б, в), где f, х — соответственно возмущающее и управляющее воздействия; grad. F = 0 -> уэкстр. Обычно при проектировании САУ всегда преследуют экстремальную цель управления. Экстремальные системы по существу являются системами автоматической стабилизации выходной величины уэкстр = const (t) или экстремума некоторого функционала J= F(y, х, у‾, х‾, …f). В последнем случае САУ решают не только задачу экстремального управления, но и задачу оптимизации, т. е. являются оптимальными САУ.

 — это системы, в которых автоматически в") Системы с самонастройкой параметров (собственно самонастраивающиеся системы) — это системы, в которых автоматически в зависимости от переменных заранее неизвестных внешних условий (по f, g) устанавливаются оптимальные значения параметров системы. Следовательно, УУ работает таким образом, чтобы регулируемая величина на выходе САУ изменялась по наивыгоднейшему (оптимальному) закону в соответствии с априори заданным критерием качества — функционалом J. Под функционалом J могут рассматриваться сложные функции полезности, максимума прибыли, минимума потерь или минимума расхода энергии при работе САУ и т. п. В роли J могут быть использованы и простые оценки качества процессов, например: минимум длительности переходного процесса tnn =min или минимум среднеквадратичной ошибки управления ε 2 =min и т. п. Здесь в схему САУ входит устройство самонастройки (УСН) — анализатор качества или оптимизатор, который определяет отклонение характеристик замкнутой САУ от желаемых (эталонных) и в зависимости от состояния системы — некоторой функции F(e, g, z, у) — воздействует на УУ. Следовательно, такие системы — это системы с самооптимизацией или иначе, адаптивные САУ со стабилизацией и с оптимизацией качества (оптимальным по быстродействию, по точности, по технико-экономическим показателям и т. п. ). Упрощенная функциональная схема такой САУ приведена на рис. 1. 8.
Системы с самонастройкой параметров (собственно самонастраивающиеся системы) — это системы, в которых автоматически в зависимости от переменных заранее неизвестных внешних условий (по f, g) устанавливаются оптимальные значения параметров системы. Следовательно, УУ работает таким образом, чтобы регулируемая величина на выходе САУ изменялась по наивыгоднейшему (оптимальному) закону в соответствии с априори заданным критерием качества — функционалом J. Под функционалом J могут рассматриваться сложные функции полезности, максимума прибыли, минимума потерь или минимума расхода энергии при работе САУ и т. п. В роли J могут быть использованы и простые оценки качества процессов, например: минимум длительности переходного процесса tnn =min или минимум среднеквадратичной ошибки управления ε 2 =min и т. п. Здесь в схему САУ входит устройство самонастройки (УСН) — анализатор качества или оптимизатор, который определяет отклонение характеристик замкнутой САУ от желаемых (эталонных) и в зависимости от состояния системы — некоторой функции F(e, g, z, у) — воздействует на УУ. Следовательно, такие системы — это системы с самооптимизацией или иначе, адаптивные САУ со стабилизацией и с оптимизацией качества (оптимальным по быстродействию, по точности, по технико-экономическим показателям и т. п. ). Упрощенная функциональная схема такой САУ приведена на рис. 1. 8.

 Системы с самонастройкой структуры — это собственно самоорганизующиеся или самоалгоритмизирующиеся системы, в которых в зависимости от переменных, заранее не определенных, внешних условий производится оптимальная настройка структуры системы таким образом, чтобы регулируемая величина на выходе изменялась по наивыгоднейшему (оптимальному) закону в соответствии с заданным критерием качества (в простейшем случае, например, минимумом ошибки управления е 2 = min ). Автоматический поиск наивыгоднейшей (оптимальной) структуры САУ дает возможность решать более сложные задачи при управлении сложными ОУ — комплексами (рис. 1. 9). На рис. 1. 9 идентификатор производит сбор и обработку информации о работе ОУ; САУ строится как система принятия решений об управлении сложным ОУ.
Системы с самонастройкой структуры — это собственно самоорганизующиеся или самоалгоритмизирующиеся системы, в которых в зависимости от переменных, заранее не определенных, внешних условий производится оптимальная настройка структуры системы таким образом, чтобы регулируемая величина на выходе изменялась по наивыгоднейшему (оптимальному) закону в соответствии с заданным критерием качества (в простейшем случае, например, минимумом ошибки управления е 2 = min ). Автоматический поиск наивыгоднейшей (оптимальной) структуры САУ дает возможность решать более сложные задачи при управлении сложными ОУ — комплексами (рис. 1. 9). На рис. 1. 9 идентификатор производит сбор и обработку информации о работе ОУ; САУ строится как система принятия решений об управлении сложным ОУ.
 Системы комбинированного типа с самонастройкой структуры и параметров, объединяющие в своем составе определенные идейные фрагменты рассмотренных структур. Все эти САУ являются также и оптимальными САУ. Интеллектуальные системы управления (ИСУ). Необходимо отметить, что в классическом понимании САУ, включающие разнообразные ОУ, воспринимались как системы, процессы в которых принципиально прогнозируемы и управляемы. Ошибки в управлении и подчас неработоспособность систем рассматривали часто как недостаток знаний (обычно об ОУ). Наращивание объема знаний в процессе эксплуатации САУ (принцип обучения и самообучения) было отражено как раз в создании обучающихся адаптивных САУ с гибкими алгоритмами управления и идентификации ОУ и процедурами принятия решений. Обучающиеся адаптивные САУ — это системы с накоплением, запоминанием и анализом информации о поведении сложного ОУ, среды функционирования и САУ в целом и изменении алгоритмов управления в зависимости от опыта и условий работы.
Системы комбинированного типа с самонастройкой структуры и параметров, объединяющие в своем составе определенные идейные фрагменты рассмотренных структур. Все эти САУ являются также и оптимальными САУ. Интеллектуальные системы управления (ИСУ). Необходимо отметить, что в классическом понимании САУ, включающие разнообразные ОУ, воспринимались как системы, процессы в которых принципиально прогнозируемы и управляемы. Ошибки в управлении и подчас неработоспособность систем рассматривали часто как недостаток знаний (обычно об ОУ). Наращивание объема знаний в процессе эксплуатации САУ (принцип обучения и самообучения) было отражено как раз в создании обучающихся адаптивных САУ с гибкими алгоритмами управления и идентификации ОУ и процедурами принятия решений. Обучающиеся адаптивные САУ — это системы с накоплением, запоминанием и анализом информации о поведении сложного ОУ, среды функционирования и САУ в целом и изменении алгоритмов управления в зависимости от опыта и условий работы.
 Область применения ИСУ — управление сложными объектами с плохо изученной динамикой, свойства, условия работы которых априорно недостаточно известны, существенно непостоянны (с дрейфом параметров, характеристик ОУ и среды функционирования). Это, в частности, и открытые неравновесные системы, в которых постоянно идут процессы организации и самоорганизации, когда после некоторых периодов количественного изменения своих параметров они могут качественно (скачкообразно, «катастрофично» ) изменять свои характеристики. ИСУ первого поколения — это адаптивные или самоприспосабливающиеся системы, обладающие способностью приспосабливаться к изменению внешних условий, а также улучшать свою работу по мере накопления опыта (свойство самообучения). В этих условиях обыкновенные, неадаптивные САУ неработоспособны либо работают неудовлетворительно, требуя постоянного квалифицированного наблюдения.
Область применения ИСУ — управление сложными объектами с плохо изученной динамикой, свойства, условия работы которых априорно недостаточно известны, существенно непостоянны (с дрейфом параметров, характеристик ОУ и среды функционирования). Это, в частности, и открытые неравновесные системы, в которых постоянно идут процессы организации и самоорганизации, когда после некоторых периодов количественного изменения своих параметров они могут качественно (скачкообразно, «катастрофично» ) изменять свои характеристики. ИСУ первого поколения — это адаптивные или самоприспосабливающиеся системы, обладающие способностью приспосабливаться к изменению внешних условий, а также улучшать свою работу по мере накопления опыта (свойство самообучения). В этих условиях обыкновенные, неадаптивные САУ неработоспособны либо работают неудовлетворительно, требуя постоянного квалифицированного наблюдения.
 ИСУ нового поколения строятся как самообучающиеся, самонастраивающиеся системы с гибкими процедурами принятия решений об управлении (нечеткое управление), как системы, основанные на знаниях и формирующие новые знания в процессе управления и функционирования. Разновидности ИСУ строятся и как экспертные системы (ЭС), встроенные в контур управления, работающие, в частности, в интерактивном режиме с лицом, принимающим решение (ЭС, как интеллектуальная ОС). Экспертные ИСУ представляют собой развитые структуры: от интеллектуальных датчиков до программных систем с выработкой лингвистических управляющих воздействий. В задачи ИСУ входят: экспертная оценка ситуации управления (на уровне машинного планирования эксперимента); синтез УУ; оценка информационной чувствительности и ранжирование каналов управления; синтез управляющих воздействий, в том числе и в виде функций принадлежности с лингвистическими переменными L (типа >, <, «норма» и т. д. )1; анализ среды функционирования; планирование траекторий; использование логико-лингвистических систем и т. п.
ИСУ нового поколения строятся как самообучающиеся, самонастраивающиеся системы с гибкими процедурами принятия решений об управлении (нечеткое управление), как системы, основанные на знаниях и формирующие новые знания в процессе управления и функционирования. Разновидности ИСУ строятся и как экспертные системы (ЭС), встроенные в контур управления, работающие, в частности, в интерактивном режиме с лицом, принимающим решение (ЭС, как интеллектуальная ОС). Экспертные ИСУ представляют собой развитые структуры: от интеллектуальных датчиков до программных систем с выработкой лингвистических управляющих воздействий. В задачи ИСУ входят: экспертная оценка ситуации управления (на уровне машинного планирования эксперимента); синтез УУ; оценка информационной чувствительности и ранжирование каналов управления; синтез управляющих воздействий, в том числе и в виде функций принадлежности с лингвистическими переменными L (типа >, <, «норма» и т. д. )1; анализ среды функционирования; планирование траекторий; использование логико-лингвистических систем и т. п.
 'Например, L= {NB, NM, NO, РО, PS, РМ, РВ}, где N - «-» ; P - «+» ; В - «>» ; М «норма» ; S - «<» ; О - «~ О » ; функции принадлежности: S-; Z- типа, треугольные, трапецеидальные, колообразные и т, д. Перевод «четких» знаний (#) в L (→) соответствует операции «фазификации» , a L — в «четкие» знания — «дефазификации» ; (- — знак соответствия). В ИСУ фрагментарно и комплексно используются современные достижения систем искусственного интеллекта, продукционные способности во многих направлениях, автоматическое и адаптационное программирование, алгоритмизация и т. д. В целом интеллектуальные системы управления можно оценивать на современном этапе как «разумные» системы, оптимизирующие процессы управления, эффективно работающие при решении задач управления сложными объектами в условиях неопределенной информации о свойствах ОУ, среды функционирования и т. п. Возникновение ИСУ предопределило развитие нового направления в теории управления, а именно разработки прикладных методов искусственного интеллекта (ИИ) и создания на их основе методологии построения САУ, ориентированных на разработку и использование знаний и развитие теории нечетких моделей динамических управляемых систем, теории нечетких алгоритмов и регуляторов.
'Например, L= {NB, NM, NO, РО, PS, РМ, РВ}, где N - «-» ; P - «+» ; В - «>» ; М «норма» ; S - «<» ; О - «~ О » ; функции принадлежности: S-; Z- типа, треугольные, трапецеидальные, колообразные и т, д. Перевод «четких» знаний (#) в L (→) соответствует операции «фазификации» , a L — в «четкие» знания — «дефазификации» ; (- — знак соответствия). В ИСУ фрагментарно и комплексно используются современные достижения систем искусственного интеллекта, продукционные способности во многих направлениях, автоматическое и адаптационное программирование, алгоритмизация и т. д. В целом интеллектуальные системы управления можно оценивать на современном этапе как «разумные» системы, оптимизирующие процессы управления, эффективно работающие при решении задач управления сложными объектами в условиях неопределенной информации о свойствах ОУ, среды функционирования и т. п. Возникновение ИСУ предопределило развитие нового направления в теории управления, а именно разработки прикладных методов искусственного интеллекта (ИИ) и создания на их основе методологии построения САУ, ориентированных на разработку и использование знаний и развитие теории нечетких моделей динамических управляемых систем, теории нечетких алгоритмов и регуляторов.
 Особенно эффективными для целей управления оказались открытые системы, способные с течением времени совершенствовать свое поведение. Прогресс в области разработки экспертных систем (ЭС) привел к созданию включенных в систему управления активных ЭС. С развитием ИСУ развивались и аппаратные средства поддержки процессов, протекающих в них: специальные процессоры поддержки языков высокого уровня (ЛИСП, ПРОЛОГ); специальные процессоры для интеллектуальных баз данных и баз знаний (в том числе и для логического вывода, основанного на знаниях); специальные процессоры для интеллектуального интерфейса (обработка изображений, текста, речи); аппаратно реализованные средства обработки нечеткой и лингвистической информации (нечеткие процессоры, «Fuzzy Processors» ), нечеткие компьютеры ( «Fuzzy Computers» ).
Особенно эффективными для целей управления оказались открытые системы, способные с течением времени совершенствовать свое поведение. Прогресс в области разработки экспертных систем (ЭС) привел к созданию включенных в систему управления активных ЭС. С развитием ИСУ развивались и аппаратные средства поддержки процессов, протекающих в них: специальные процессоры поддержки языков высокого уровня (ЛИСП, ПРОЛОГ); специальные процессоры для интеллектуальных баз данных и баз знаний (в том числе и для логического вывода, основанного на знаниях); специальные процессоры для интеллектуального интерфейса (обработка изображений, текста, речи); аппаратно реализованные средства обработки нечеткой и лингвистической информации (нечеткие процессоры, «Fuzzy Processors» ), нечеткие компьютеры ( «Fuzzy Computers» ).
 Общесистемный подход к решению таких задач привел к необходимости формирования теории ИСУ на стыке искусственного интеллекта, исследования операций и ТАУ. Основной предмет исследования теории ИСУ — разработка конкретных структур САУ в рамках общей концепции архитектуры ИСУ, претендующей на интеллектуальное поведение при решении различных задач. Структура ИСУ, в частности, может соответствовать уровням, упорядоченным в соответствии с базовым принципом IPD 1 (Increase of Precision with Decrease of Intelligence): точность управления тем выше, чем меньше интеллектуальность системы, и наоборот, точность управления тем ниже, чем выше интеллектуальность данного уровня иерархии системы.
Общесистемный подход к решению таких задач привел к необходимости формирования теории ИСУ на стыке искусственного интеллекта, исследования операций и ТАУ. Основной предмет исследования теории ИСУ — разработка конкретных структур САУ в рамках общей концепции архитектуры ИСУ, претендующей на интеллектуальное поведение при решении различных задач. Структура ИСУ, в частности, может соответствовать уровням, упорядоченным в соответствии с базовым принципом IPD 1 (Increase of Precision with Decrease of Intelligence): точность управления тем выше, чем меньше интеллектуальность системы, и наоборот, точность управления тем ниже, чем выше интеллектуальность данного уровня иерархии системы.
 Класс ИСУ соответствует следующим пяти принципам: • наличие взаимодействия управляющей системы с реальным внешним миром с использованием информационных каналов связи (данный принцип подчеркивает непосредственную связь интеллектуальных систем с внешним миром); ИСУ получают из него знания и влияют на него. Выполнение этого принципа позволяет организовывать канал связи для извлечения знаний и организации целесообразного поведения; • принципиальная открытость системы с целью повышения интеллектуальности и совершенствования собственного поведения (открытость системы обеспечивается наличием самонастройки, самоорганизации и самообучения). Система знаний ИСУ состоит из двух частей: поступающие знания и проверенные знания. Этот принцип позволяет организовывать пополнение и приобретение знаний; • наличие механизмов прогноза изменений среды функционирования и собственного поведения системы в динамически меняющемся внешнем мире. В соответствии с этим принципом ИСУ не полностью интеллектуальна, если она не обладает возможностью прогноза изменений внешнего мира и собственного поведения (система без прогноза может попасть в критическую ситуацию);
Класс ИСУ соответствует следующим пяти принципам: • наличие взаимодействия управляющей системы с реальным внешним миром с использованием информационных каналов связи (данный принцип подчеркивает непосредственную связь интеллектуальных систем с внешним миром); ИСУ получают из него знания и влияют на него. Выполнение этого принципа позволяет организовывать канал связи для извлечения знаний и организации целесообразного поведения; • принципиальная открытость системы с целью повышения интеллектуальности и совершенствования собственного поведения (открытость системы обеспечивается наличием самонастройки, самоорганизации и самообучения). Система знаний ИСУ состоит из двух частей: поступающие знания и проверенные знания. Этот принцип позволяет организовывать пополнение и приобретение знаний; • наличие механизмов прогноза изменений среды функционирования и собственного поведения системы в динамически меняющемся внешнем мире. В соответствии с этим принципом ИСУ не полностью интеллектуальна, если она не обладает возможностью прогноза изменений внешнего мира и собственного поведения (система без прогноза может попасть в критическую ситуацию);
 • наличие у системы структуры построения, соответствующей принципу IPDI, что намечает пути построения сложных ИСУ в случае, когда неточность знаний о модели ОУ или о его поведении может быть скомпенсирована за счет повышения интеллектуальности создаваемой системы или соответствующих алгоритмов управления; • сохранение функционирования (возможно, с некоторой потерей качества) при разрыве связей или потере управляющих воздействий от вышестоящих уровней иерархии ИСУ. Этот принцип определяет лишь потерю интеллектуальности, но не прекращая функционирования при отказах в работе высших уровней иерархии системы. Сохранение автономного функционирования в рамках более простого поведения системы очень важно для автономно функционирующих систем в реальном внешнем мире.
• наличие у системы структуры построения, соответствующей принципу IPDI, что намечает пути построения сложных ИСУ в случае, когда неточность знаний о модели ОУ или о его поведении может быть скомпенсирована за счет повышения интеллектуальности создаваемой системы или соответствующих алгоритмов управления; • сохранение функционирования (возможно, с некоторой потерей качества) при разрыве связей или потере управляющих воздействий от вышестоящих уровней иерархии ИСУ. Этот принцип определяет лишь потерю интеллектуальности, но не прекращая функционирования при отказах в работе высших уровней иерархии системы. Сохранение автономного функционирования в рамках более простого поведения системы очень важно для автономно функционирующих систем в реальном внешнем мире.
 Исходя из изложенного, для ИСУ вводят понятия интеллектуальности «в малом» и интеллектуальности «в большом» . ИСУ, организованная в соответствии со всеми пятью принципами, называется интеллектуальной «в большом» . Такие системы должны иметь иерархическую структуру с несколькими рангами: обучения, самоорганизации (настройка), прогноза событий, работы с базой знаний и базой событий, формирования решений, планирования операций по реализации решения, адаптации, исполнительного уровня. Самый нижний уровень таких систем занимают традиционные САУ; ИСУ, структурно не организованные в соответствии с перечисленными пятью принципами, но использующие при функционировании знания для преодоления неопределенности входной информации, модели управляемого объекта или его поведения, есть системы, интеллектуальные «в малом» . Примером таких систем могут служить САУ с нечеткими регуляторами (контроллерами). САУ с нечетким регулятором называют иерархически двухуровневую систему управления, «интеллектуальную в малом» , на нижнем уровне которой находится, например, традиционный ПИД-регулятор, а на верхнем — база знаний (БЗ) и устройства перевода в лингвистические и четкие знания (с помощью лингвистических правил-знаний).
Исходя из изложенного, для ИСУ вводят понятия интеллектуальности «в малом» и интеллектуальности «в большом» . ИСУ, организованная в соответствии со всеми пятью принципами, называется интеллектуальной «в большом» . Такие системы должны иметь иерархическую структуру с несколькими рангами: обучения, самоорганизации (настройка), прогноза событий, работы с базой знаний и базой событий, формирования решений, планирования операций по реализации решения, адаптации, исполнительного уровня. Самый нижний уровень таких систем занимают традиционные САУ; ИСУ, структурно не организованные в соответствии с перечисленными пятью принципами, но использующие при функционировании знания для преодоления неопределенности входной информации, модели управляемого объекта или его поведения, есть системы, интеллектуальные «в малом» . Примером таких систем могут служить САУ с нечеткими регуляторами (контроллерами). САУ с нечетким регулятором называют иерархически двухуровневую систему управления, «интеллектуальную в малом» , на нижнем уровне которой находится, например, традиционный ПИД-регулятор, а на верхнем — база знаний (БЗ) и устройства перевода в лингвистические и четкие знания (с помощью лингвистических правил-знаний).
 В зависимости от типа используемого регулятора и способов формирования базы знаний (и особенностей механизма вывода) нечеткий регулятор может быть адаптивным, самообучающимся и нечетким регулятором с активной экспертной системой. Если в структуре нечеткого регулятора на нижнем уровне иерархии используются адаптивные, самоорганизующие ПИДрегуляторы, то улучшаются функционирование и динамические характеристики исполнительного уровня, но не затрагиваются вопросы интеллектуализации его поведения. Изменение способов формирования базы знаний дает возможность повысить интеллектуальный уровень системы вплоть до «интеллектуальности в большом» .
В зависимости от типа используемого регулятора и способов формирования базы знаний (и особенностей механизма вывода) нечеткий регулятор может быть адаптивным, самообучающимся и нечетким регулятором с активной экспертной системой. Если в структуре нечеткого регулятора на нижнем уровне иерархии используются адаптивные, самоорганизующие ПИДрегуляторы, то улучшаются функционирование и динамические характеристики исполнительного уровня, но не затрагиваются вопросы интеллектуализации его поведения. Изменение способов формирования базы знаний дает возможность повысить интеллектуальный уровень системы вплоть до «интеллектуальности в большом» .
 представляются набором нечетких правил, результат которых на выходе") Интеллектуальные или нечеткие алгоритмы управления (НАУ) представляются набором нечетких правил, результат которых на выходе нечеткого регулятора (HP) не определенное значение (число), а нечеткое множество, описываемые посредством некоторых функций принадлежности логической переменной. НАУ являются принципиально нелинейными, базирующимися на эмпирических знаниях в виде некоторой совокупности правил (таблиц решений). Для вывода правил используются различные методы, в частности метод «максимумаминимума» . Машина вывода (MB) формирует НАУ по цепи БЗ-МВ. В соответствии с нечеткими алгоритмами на выходе HP формируются нечеткие указания (термы), содержащие рекомендации, основанные на логическом подходе к моделированию процессов, происходящих в сложном ОУ с учетом воздействий на него среды функционирования. Логические модели работы ОУ содержат основные понятия — ее атрибуты: часть из них составляют входные воздействия (x), часть — функции, определяющие состояния ОУ (у), между которыми непосредственно (или через промежуточные переменные) устанавливается функциональная взаимосвязь в виде логических функций L с учетом действия внешних возмущений (f). Логические функции, относящиеся к определенному блоку свойств ОУ, обычно формируют в виде таблиц, отображающих функциональные зависимости — табличные функции, например у = тах(х1, х2). Сборка модели функционирования сложного ОУ (композиция) производится из блоков посредством создания цельной иерархической функциональной сети (схемы) ОУ.
Интеллектуальные или нечеткие алгоритмы управления (НАУ) представляются набором нечетких правил, результат которых на выходе нечеткого регулятора (HP) не определенное значение (число), а нечеткое множество, описываемые посредством некоторых функций принадлежности логической переменной. НАУ являются принципиально нелинейными, базирующимися на эмпирических знаниях в виде некоторой совокупности правил (таблиц решений). Для вывода правил используются различные методы, в частности метод «максимумаминимума» . Машина вывода (MB) формирует НАУ по цепи БЗ-МВ. В соответствии с нечеткими алгоритмами на выходе HP формируются нечеткие указания (термы), содержащие рекомендации, основанные на логическом подходе к моделированию процессов, происходящих в сложном ОУ с учетом воздействий на него среды функционирования. Логические модели работы ОУ содержат основные понятия — ее атрибуты: часть из них составляют входные воздействия (x), часть — функции, определяющие состояния ОУ (у), между которыми непосредственно (или через промежуточные переменные) устанавливается функциональная взаимосвязь в виде логических функций L с учетом действия внешних возмущений (f). Логические функции, относящиеся к определенному блоку свойств ОУ, обычно формируют в виде таблиц, отображающих функциональные зависимости — табличные функции, например у = тах(х1, х2). Сборка модели функционирования сложного ОУ (композиция) производится из блоков посредством создания цельной иерархической функциональной сети (схемы) ОУ.
 ИСУ обеспечивают эффективное управление в широком диапазоне начальных условий, с качеством не хуже или на уровне линейных САУ, и HP не надо отстраивать в процессе работы (робастное управление). Таким образом, в ИСУ реализуются принципиально новые и более эффективные алгоритмы с применением нечеткой логики управления и искусственных нейронных сетей (ИНС). ИНС обладают таким полезным свойством, как способность к обучению, что делает универсальным их применение в различных сложных условиях функционирования ОУ. Обычно используют ИНС прямого распространения (персептроны) и сети Хопфилда; они входят в HP, служат фактически БЗ, содержащей информацию о желаемом поведении системы. Например, ИНС прямого распространения с сигмоидальной функцией нелинейности нейрона. В совокупности работа ИСУ с НАУ позволяет достаточно имитировать действия эксперта (человекаоператора) в процессе принятия решений при управлении сложными ОУ.
ИСУ обеспечивают эффективное управление в широком диапазоне начальных условий, с качеством не хуже или на уровне линейных САУ, и HP не надо отстраивать в процессе работы (робастное управление). Таким образом, в ИСУ реализуются принципиально новые и более эффективные алгоритмы с применением нечеткой логики управления и искусственных нейронных сетей (ИНС). ИНС обладают таким полезным свойством, как способность к обучению, что делает универсальным их применение в различных сложных условиях функционирования ОУ. Обычно используют ИНС прямого распространения (персептроны) и сети Хопфилда; они входят в HP, служат фактически БЗ, содержащей информацию о желаемом поведении системы. Например, ИНС прямого распространения с сигмоидальной функцией нелинейности нейрона. В совокупности работа ИСУ с НАУ позволяет достаточно имитировать действия эксперта (человекаоператора) в процессе принятия решений при управлении сложными ОУ.
 Функционирование ИСУ, например в автоматическом режиме для целей автономной навигации космических ЛА (примером ИСУ ЛА является известная система управления полетом и силовой установкой гиперзвукового самолета нового поколения X-29 (USA, 1992 г. ) ), характеризуется выработкой и коррекцией как целей и алгоритмов управления ( «внутри» ИСУ), так и «оптимальным» построением структуры самой ИСУ с наивыгоднейшим процессом управления и поведения в целом с учетом текущего определения свойств (моделей) сложного ОУ и параметров среды функционирования ( «внешнего мира» ). Применение в ИСУ интеллектуальных технологий управления с комплексным использованием достижений ТАУ, ИИ, нейрофизиологии определяет разработку новых методов и средств управления, например параллельных нечетных алгоритмов управления, динамических ЭС-адаптивных регуляторов; нейросетевых, транспьютерных, сигнальных нечетких регуляторов и т. д.
Функционирование ИСУ, например в автоматическом режиме для целей автономной навигации космических ЛА (примером ИСУ ЛА является известная система управления полетом и силовой установкой гиперзвукового самолета нового поколения X-29 (USA, 1992 г. ) ), характеризуется выработкой и коррекцией как целей и алгоритмов управления ( «внутри» ИСУ), так и «оптимальным» построением структуры самой ИСУ с наивыгоднейшим процессом управления и поведения в целом с учетом текущего определения свойств (моделей) сложного ОУ и параметров среды функционирования ( «внешнего мира» ). Применение в ИСУ интеллектуальных технологий управления с комплексным использованием достижений ТАУ, ИИ, нейрофизиологии определяет разработку новых методов и средств управления, например параллельных нечетных алгоритмов управления, динамических ЭС-адаптивных регуляторов; нейросетевых, транспьютерных, сигнальных нечетких регуляторов и т. д.
 Теория ИСУ в ТАУ является, по-видимому, предельной формацией парадигмы теории управления. С точки зрения ТАУ, ИСУ — это многомерные, многосвязные системы со многими х, f, u, y, сильными возмущениями, нелинейностями, с неточностью математического описания, возможностью использования нечетких знаний типа «knowhow» , лингвистического описания процессов, с обработкой большого объема информации в реальном времени. Теория уделяет значительное внимание интеллектуальным технологиям в ИСУ: анализу и синтезу описательно заданных объектов (ситуаций), выделению базового ядра, описанию информационных потоков и т. п. Теория ориентирована на широкий круг проблем, имеющих описательное и лингвистическое представление. Понятие интеллекта здесь воспринимается как атрибут системы определенного уровня сложности. Важнейшей особенностью ИСУ является ориентация на системно открытые объекты с автоматической выработкой решения внутри управляющей системы на основе сформированного и накопленного в ней знания.
Теория ИСУ в ТАУ является, по-видимому, предельной формацией парадигмы теории управления. С точки зрения ТАУ, ИСУ — это многомерные, многосвязные системы со многими х, f, u, y, сильными возмущениями, нелинейностями, с неточностью математического описания, возможностью использования нечетких знаний типа «knowhow» , лингвистического описания процессов, с обработкой большого объема информации в реальном времени. Теория уделяет значительное внимание интеллектуальным технологиям в ИСУ: анализу и синтезу описательно заданных объектов (ситуаций), выделению базового ядра, описанию информационных потоков и т. п. Теория ориентирована на широкий круг проблем, имеющих описательное и лингвистическое представление. Понятие интеллекта здесь воспринимается как атрибут системы определенного уровня сложности. Важнейшей особенностью ИСУ является ориентация на системно открытые объекты с автоматической выработкой решения внутри управляющей системы на основе сформированного и накопленного в ней знания.
 Процессы, происходящие в САУ, как у всякой динамической системы, делятся на установившиеся и переходные. Установившийся процесс в САУ характеризуется постоянством внешних воздействий и других условий работы ОУ и системы в целом. Изменение этих условий вызывает переходные процессы в САУ и требует управления системой. Основной причиной возникновения переходных процессов в САУ обычно является изменение условий работы ОУ и непостоянство внешних возмущений. Инерционность, присущая всем без исключения техническим устройствам, вызывает замедление процессов во времени. Основные проблемы ТАУ связаны с кибернетическими проблемами и сводятся к определению и теории общих закономерностей управления в информационном аспекте (сбору и обработке информации), к проблеме устойчивости, качества, оптимизации. При рассмотрении процессов в САУ наиболее важное значение имеют проблемы устойчивости системы, качества и оптимизации процессов управления.
Процессы, происходящие в САУ, как у всякой динамической системы, делятся на установившиеся и переходные. Установившийся процесс в САУ характеризуется постоянством внешних воздействий и других условий работы ОУ и системы в целом. Изменение этих условий вызывает переходные процессы в САУ и требует управления системой. Основной причиной возникновения переходных процессов в САУ обычно является изменение условий работы ОУ и непостоянство внешних возмущений. Инерционность, присущая всем без исключения техническим устройствам, вызывает замедление процессов во времени. Основные проблемы ТАУ связаны с кибернетическими проблемами и сводятся к определению и теории общих закономерностей управления в информационном аспекте (сбору и обработке информации), к проблеме устойчивости, качества, оптимизации. При рассмотрении процессов в САУ наиболее важное значение имеют проблемы устойчивости системы, качества и оптимизации процессов управления.
 Устойчивость — это свойство процессов в САУ и самой САУ приходить в установившееся состояние, так как замкнутые САУ весьма склонны к потере устойчивости при действии возмущений. Неустойчивость системы выражается, например, в возникновении колебаний со все возрастающей амплитудой — расходящихся колебаний. Переходные процессы, соответствующие устойчивой системе, должны сопровождаться уменьшением отклонения выходной координаты САУ y(t) со временем, т. е. отклонения должны не возрастать, а уменьшаться — затухать. Устойчивость — необходимое условие работоспособности САУ. Качество процессов управления характеризуется комплексом показателей и интегрально оценивается тем, насколько процесс управления в реальной САУ близок к заданному (желаемому). Количественно комплекс показателей определяется критериями качества J (скалярные, векторные, интегральные критерии), которые выбираются в соответствии с целью управления и структурой САУ. Качество процессов управления может оцениваться и такими простыми параметрами, как величиной максимального отклонения y(t), вызванной скачком возмущения; колебательностью переходного процесса, его длительностью (критерии точности и быстродействия) и весьма сложными, соответствующими комплексным технико-экономическим показателям работы сложного ОУ и САУ в целом.
Устойчивость — это свойство процессов в САУ и самой САУ приходить в установившееся состояние, так как замкнутые САУ весьма склонны к потере устойчивости при действии возмущений. Неустойчивость системы выражается, например, в возникновении колебаний со все возрастающей амплитудой — расходящихся колебаний. Переходные процессы, соответствующие устойчивой системе, должны сопровождаться уменьшением отклонения выходной координаты САУ y(t) со временем, т. е. отклонения должны не возрастать, а уменьшаться — затухать. Устойчивость — необходимое условие работоспособности САУ. Качество процессов управления характеризуется комплексом показателей и интегрально оценивается тем, насколько процесс управления в реальной САУ близок к заданному (желаемому). Количественно комплекс показателей определяется критериями качества J (скалярные, векторные, интегральные критерии), которые выбираются в соответствии с целью управления и структурой САУ. Качество процессов управления может оцениваться и такими простыми параметрами, как величиной максимального отклонения y(t), вызванной скачком возмущения; колебательностью переходного процесса, его длительностью (критерии точности и быстродействия) и весьма сложными, соответствующими комплексным технико-экономическим показателям работы сложного ОУ и САУ в целом.
 Критерии точности управления характеризуют погрешность САУ в установившихся режимах. Для обыкновенных САУ обычно точность определяется величиной установившегося отклонения y(t) от заданного значения (после окончания переходного процесса). Оптимизация, адаптация и интеллектуализация САУ — это процесс создания САУ в соответствии с принципами, изложенными выше. Проблемы устойчивости, качества, оптимизации и интеллектуализации составляют основной информационный аспект ТАУ. Энергетический аспект, связанный с расчетом и выбором элементов и САУ в целом, в ТАУ не рассматривается; эти вопросы рассматриваются в специальных курсах.
Критерии точности управления характеризуют погрешность САУ в установившихся режимах. Для обыкновенных САУ обычно точность определяется величиной установившегося отклонения y(t) от заданного значения (после окончания переходного процесса). Оптимизация, адаптация и интеллектуализация САУ — это процесс создания САУ в соответствии с принципами, изложенными выше. Проблемы устойчивости, качества, оптимизации и интеллектуализации составляют основной информационный аспект ТАУ. Энергетический аспект, связанный с расчетом и выбором элементов и САУ в целом, в ТАУ не рассматривается; эти вопросы рассматриваются в специальных курсах.
 ГЛАВА 2. МАТЕМАТИЧЕСКИЕ ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ УПРАВЛЕНИЯ И МЕТОДЫ ИХ ИДЕНТИФИКАЦИИ
ГЛАВА 2. МАТЕМАТИЧЕСКИЕ ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ УПРАВЛЕНИЯ И МЕТОДЫ ИХ ИДЕНТИФИКАЦИИ
