Prez_nadezhnost_1.ppt
- Количество слайдов: 103
 Основні поняття надійності Надійність це властивість технічних систем виконувати задані функції, зберігаючи в часі значення встановлених експлуатаційних показників у заданих межах, що відповідають заданим режимам і умовам використання, технічного обслуговування, зберігання і транспортування Надійність включає в себе такі властивості ТС, як: безвідмовність, довговічність, збережуваність і ремонтопридатність Безвідмовність - властивість ТС безупинно зберігати працездатність протягом деякого часу або деякого напрацювання Довговічність - властивість ТС зберігати працездатність до настання граничного стану при встановленій системі технічного обслуговування і ремонтів
Основні поняття надійності Надійність це властивість технічних систем виконувати задані функції, зберігаючи в часі значення встановлених експлуатаційних показників у заданих межах, що відповідають заданим режимам і умовам використання, технічного обслуговування, зберігання і транспортування Надійність включає в себе такі властивості ТС, як: безвідмовність, довговічність, збережуваність і ремонтопридатність Безвідмовність - властивість ТС безупинно зберігати працездатність протягом деякого часу або деякого напрацювання Довговічність - властивість ТС зберігати працездатність до настання граничного стану при встановленій системі технічного обслуговування і ремонтів
 Основні поняття надійності Збережуваність - це властивість ТС безупинно зберігати справний і працездатний стан протягом і після зберігання та транспортування. Збережуваність характеризується здатністю об'єкта протистояти негативному впливу умов зберігання і транспортування на його безвідмовність і довговічність. Тривале зберігання і транспортування об'єктів можуть знизити їх надійність при подальшій роботі в порівнянні з об'єктами, які не піддаються зберіганню і транспортуванню Ремонтопридатність - властивість ТС, що полягає в її пристосованості до попередження і виявлення причин виникнення відмов, пошкоджень та усунення їх наслідків шляхом проведення ремонту і технічного обслуговування. Дана властивість є дуже важливою, оскільки характеризує ступінь стандартизації і уніфікації елементів ТС, зручність їх розміщення з точки зору доступності для контролю і ремонту, пристосованість до регулювальних операцій і т. і.
Основні поняття надійності Збережуваність - це властивість ТС безупинно зберігати справний і працездатний стан протягом і після зберігання та транспортування. Збережуваність характеризується здатністю об'єкта протистояти негативному впливу умов зберігання і транспортування на його безвідмовність і довговічність. Тривале зберігання і транспортування об'єктів можуть знизити їх надійність при подальшій роботі в порівнянні з об'єктами, які не піддаються зберіганню і транспортуванню Ремонтопридатність - властивість ТС, що полягає в її пристосованості до попередження і виявлення причин виникнення відмов, пошкоджень та усунення їх наслідків шляхом проведення ремонту і технічного обслуговування. Дана властивість є дуже важливою, оскільки характеризує ступінь стандартизації і уніфікації елементів ТС, зручність їх розміщення з точки зору доступності для контролю і ремонту, пристосованість до регулювальних операцій і т. і.
 Технічний стан ТС в даний момент часу характеризується: - справністю або несправністю, - працездатністю чи непрацездатністю, - граничним станом Справний стан (справність) ТС - це такий її стан, при якому вона відповідає всім вимогам, встановленим нормативно-технічною документацією (НТД) Несправний стан (несправність) ТС - це такий її стан, при якому вона не відповідає хоча б одній з вимог, встановлених НТД ТС перебуває в працездатному стані, якщо вона здатна виконати задані функції, зберігаючи значення заданих параметрів у межах, встановлених НТД Непрацездатний стан це такий стан ТС, при якому значення хоча б одного заданого параметра, що характеризує її здатність виконувати задані функції, не відповідає встановленим вимогам НТД
Технічний стан ТС в даний момент часу характеризується: - справністю або несправністю, - працездатністю чи непрацездатністю, - граничним станом Справний стан (справність) ТС - це такий її стан, при якому вона відповідає всім вимогам, встановленим нормативно-технічною документацією (НТД) Несправний стан (несправність) ТС - це такий її стан, при якому вона не відповідає хоча б одній з вимог, встановлених НТД ТС перебуває в працездатному стані, якщо вона здатна виконати задані функції, зберігаючи значення заданих параметрів у межах, встановлених НТД Непрацездатний стан це такий стан ТС, при якому значення хоча б одного заданого параметра, що характеризує її здатність виконувати задані функції, не відповідає встановленим вимогам НТД
 Технічний стан ТС Поняття справності ширше поняття працездатності. Несправна ТС може бути працездатною і непрацездатною - все залежить від того, якої вимоги НТД не задовольняє дана ТС Приклад: якщо є незначні дефекти корпусу, шасі, лакофарбового покриття, ізоляції провідників, при тому, що параметри ТС знаходяться в межах норми, вона вважається несправною, але в той же час працездатною Справна ТС завжди працездатна При тривалій експлуатації ТС може досягти граничного стану, при якому її подальша експлуатація повинна бути припинена у разі: - неусувного порушення вимог безпеки; - “виходу” заданих параметрів за встановлені межі; - незворотного зниження ефективності експлуатації ТС нижче допустимої, - необхідності проведення середнього або капітального ремонту ТС
Технічний стан ТС Поняття справності ширше поняття працездатності. Несправна ТС може бути працездатною і непрацездатною - все залежить від того, якої вимоги НТД не задовольняє дана ТС Приклад: якщо є незначні дефекти корпусу, шасі, лакофарбового покриття, ізоляції провідників, при тому, що параметри ТС знаходяться в межах норми, вона вважається несправною, але в той же час працездатною Справна ТС завжди працездатна При тривалій експлуатації ТС може досягти граничного стану, при якому її подальша експлуатація повинна бути припинена у разі: - неусувного порушення вимог безпеки; - “виходу” заданих параметрів за встановлені межі; - незворотного зниження ефективності експлуатації ТС нижче допустимої, - необхідності проведення середнього або капітального ремонту ТС
 Класифікація ТС виходячи з можливості подальшого використання після відмови і пристосованості до відновлення Відновлюваної ТС є така ТС, працездатність якої у разі виникнення відмови підлягає відновленню конкретній ситуації ТС є невідновлювальної якщо ж у конкретній ситуації відновлення працездатності даної ТС при її відмові з якихось причин визнається недоцільним або нездійсненним
Класифікація ТС виходячи з можливості подальшого використання після відмови і пристосованості до відновлення Відновлюваної ТС є така ТС, працездатність якої у разі виникнення відмови підлягає відновленню конкретній ситуації ТС є невідновлювальної якщо ж у конкретній ситуації відновлення працездатності даної ТС при її відмові з якихось причин визнається недоцільним або нездійсненним
 Класифікація ТС виходячи з можливості подальшого використання після відмови і пристосованості до відновлення Ремонтуємою ТС є система, несправність або працездатність якої у разі виникнення відмови або пошкодження підлягають відновленню В іншому випадку - об'єкт є неремонтуємим, тобто не підлягає відновленню. Наприклад, електролампочки Неремонтуємий пристрій завжди є і невідновлюваним Ремонтуємий пристрій може бути як відновлюваним, так і невідновлюваним - в залежності від існуючої системи технічного обслуговування і ремонту, конкретної ситуації в момент відмови Стан працездатності пристрою в довільно обраний момент часу називається готовністю Якщо працездатність пристрою зберігатися протягом заданого інтервалу часу, то тоді забезпечується так звана оперативна готовність пристрою
Класифікація ТС виходячи з можливості подальшого використання після відмови і пристосованості до відновлення Ремонтуємою ТС є система, несправність або працездатність якої у разі виникнення відмови або пошкодження підлягають відновленню В іншому випадку - об'єкт є неремонтуємим, тобто не підлягає відновленню. Наприклад, електролампочки Неремонтуємий пристрій завжди є і невідновлюваним Ремонтуємий пристрій може бути як відновлюваним, так і невідновлюваним - в залежності від існуючої системи технічного обслуговування і ремонту, конкретної ситуації в момент відмови Стан працездатності пристрою в довільно обраний момент часу називається готовністю Якщо працездатність пристрою зберігатися протягом заданого інтервалу часу, то тоді забезпечується так звана оперативна готовність пристрою
 Пошкодження і відмови Пошкодження це подія, що полягає у порушенні справності ТС або її складових частин через вплив зовнішніх факторів, рівень яких перевищує значення, встановлені НТД Відмова - це випадкова подія, що полягає в порушенні працездатності ТС під впливом низки випадкових факторів Пошкодження може бути істотним і стати причиною відмови і несуттєвим, при якому працездатність ТС зберігається Критерієм відмови є ознаки виходу хоча б одного заданого параметра за встановлений допуск. Критерії відмови повинні зазначатися в НТД Причини відмови – прорахунки при конструюванні, дефекти виробництва, порушення правил і норм експлуатації, пошкодження, а також природні процеси зношування і старіння Ознаки відмови або пошкодження проявляють безпосередній чи опосередкований вплив на органи почуттів спостерігача (оператора) явищ, характерних для непрацездатного стану об'єкта, або процесів з ними пов'язаних Характер відмови або пошкодження визначають конкретні зміни, що відбулися в об'єкті Наслідкі відмови або ушкодження - явища і події, що виникли після відмови чи пошкодження, і є в безпосередньому причинному зв'язку з ним
Пошкодження і відмови Пошкодження це подія, що полягає у порушенні справності ТС або її складових частин через вплив зовнішніх факторів, рівень яких перевищує значення, встановлені НТД Відмова - це випадкова подія, що полягає в порушенні працездатності ТС під впливом низки випадкових факторів Пошкодження може бути істотним і стати причиною відмови і несуттєвим, при якому працездатність ТС зберігається Критерієм відмови є ознаки виходу хоча б одного заданого параметра за встановлений допуск. Критерії відмови повинні зазначатися в НТД Причини відмови – прорахунки при конструюванні, дефекти виробництва, порушення правил і норм експлуатації, пошкодження, а також природні процеси зношування і старіння Ознаки відмови або пошкодження проявляють безпосередній чи опосередкований вплив на органи почуттів спостерігача (оператора) явищ, характерних для непрацездатного стану об'єкта, або процесів з ними пов'язаних Характер відмови або пошкодження визначають конкретні зміни, що відбулися в об'єкті Наслідкі відмови або ушкодження - явища і події, що виникли після відмови чи пошкодження, і є в безпосередньому причинному зв'язку з ним
 Класифікація відмов ТС Ознаки відмови Вид відмови Характеристика відмови 1 2 3 Характер зміни параметра до моменту виникнення відмови Зв'язок з відмовами інших елементів (вузлів, пристроїв) Можливість використання елемента після відмови Раптовий Стрибкоподібна зміна значень одного чи декількох параметрів ТС Поступовий Поступова зміна одного або декількох параметрів за рахунок повільного, поступового погіршення якості ТС. (Наприклад, знос поршневих кілець в циліндрах двигуна внутрішнього згоряння поступова відмова) Незалежний (первинний) Відмова не обумовлена пошкодженнями або відхиленнями інших елементів (вузлів) Залежний (вторинна) Відмова обумовлений пошкодженнями або відмовами інших елементів (вузлів, пристроїв). (Наприклад, із-за пробою конденсатора може згоріти інший елемент пристрою) Повний Повна втрата працездатності, що виключає використання ТС за призначенням Частковий Подальше використання системи можливе, але з меншою ефективністю
Класифікація відмов ТС Ознаки відмови Вид відмови Характеристика відмови 1 2 3 Характер зміни параметра до моменту виникнення відмови Зв'язок з відмовами інших елементів (вузлів, пристроїв) Можливість використання елемента після відмови Раптовий Стрибкоподібна зміна значень одного чи декількох параметрів ТС Поступовий Поступова зміна одного або декількох параметрів за рахунок повільного, поступового погіршення якості ТС. (Наприклад, знос поршневих кілець в циліндрах двигуна внутрішнього згоряння поступова відмова) Незалежний (первинний) Відмова не обумовлена пошкодженнями або відхиленнями інших елементів (вузлів) Залежний (вторинна) Відмова обумовлений пошкодженнями або відмовами інших елементів (вузлів, пристроїв). (Наприклад, із-за пробою конденсатора може згоріти інший елемент пристрою) Повний Повна втрата працездатності, що виключає використання ТС за призначенням Частковий Подальше використання системи можливе, але з меншою ефективністю
 1 3 Збій Відмова, що самоусувається, яка призводить до короткочасного порушення працездатності Що перемежовується Характер прояви відмови 2 Багаторазово виникає збій одного і того ж характеру (то виникає, то зникає), пов'язаний із зворотними випадковими змінами режимів роботи та параметрів пристрою. (Наприклад, зниження чутливості приладу може статися через випадкове різке зменшення напруги живлення) Стійкий Відмова, усувається тільки в результаті (остаточний) проведення відновлювальних робіт, є наслідком незворотних процесів в деталях і матеріалах. (Наприклад, вихід з ладу пристрою через обрив нитки розжарення електронної лампи) Причина виникнення відмови Конструктивний Виникає внаслідок порушення встановлених правил і норм конструювання Виробничий Виникає через порушення або недосконалість технологічного процесу виготовлення або ремонту ТС Експлуатаційний Виникає внаслідок порушення встановлених правил та умов експлуатації ТС
1 3 Збій Відмова, що самоусувається, яка призводить до короткочасного порушення працездатності Що перемежовується Характер прояви відмови 2 Багаторазово виникає збій одного і того ж характеру (то виникає, то зникає), пов'язаний із зворотними випадковими змінами режимів роботи та параметрів пристрою. (Наприклад, зниження чутливості приладу може статися через випадкове різке зменшення напруги живлення) Стійкий Відмова, усувається тільки в результаті (остаточний) проведення відновлювальних робіт, є наслідком незворотних процесів в деталях і матеріалах. (Наприклад, вихід з ладу пристрою через обрив нитки розжарення електронної лампи) Причина виникнення відмови Конструктивний Виникає внаслідок порушення встановлених правил і норм конструювання Виробничий Виникає через порушення або недосконалість технологічного процесу виготовлення або ремонту ТС Експлуатаційний Виникає внаслідок порушення встановлених правил та умов експлуатації ТС
 1 Час виникнення відмови 2 Період приробітку Зумовлений прихованими виробничими дефектами, не виявленими в процесі контролю Період нормальної експлуатації Період старіння Можливості виявлення відмови 3 Очевидні (явні) Приховані (неявні) Обумовлений недосконалістю конструкції, прихованими виробничими дефектами та експлуатаційними навантаженнями Обумовлений процесами старіння та зносу матеріалів і елементів ТС
1 Час виникнення відмови 2 Період приробітку Зумовлений прихованими виробничими дефектами, не виявленими в процесі контролю Період нормальної експлуатації Період старіння Можливості виявлення відмови 3 Очевидні (явні) Приховані (неявні) Обумовлений недосконалістю конструкції, прихованими виробничими дефектами та експлуатаційними навантаженнями Обумовлений процесами старіння та зносу матеріалів і елементів ТС
 Ефективність технічних систем Надійність є фундаментальним поняттям, що охоплює всі сторони технічної експлуатації елементів, вузлів, блоків і систем. Надійність є частиною більш широкого поняття - ефективності Ефективність ТС - це властивість системи виконувати задані функції з потрібною якістю. На ефективність функціонування ТС поряд з надійністю впливають інші характеристики, такі як точність, швидкодія, завадостійкість і т. д. Основним завданням при проектуванні ТС різного призначення є забезпечення ефективності та якості функціонування ТС, а, отже, поліпшення таких характеристик ТС, як надійність, міцність, швидкодія і т. д. Одним з методів підвищення надійності, що широко використовується при проектуванні ТС, є резервування - метод підвищення надійності за рахунок введення надмірності. Під надмірністю розуміють додаткові засоби і можливості понад мінімально необхідних для забезпечення виконання ТС заданих функцій
Ефективність технічних систем Надійність є фундаментальним поняттям, що охоплює всі сторони технічної експлуатації елементів, вузлів, блоків і систем. Надійність є частиною більш широкого поняття - ефективності Ефективність ТС - це властивість системи виконувати задані функції з потрібною якістю. На ефективність функціонування ТС поряд з надійністю впливають інші характеристики, такі як точність, швидкодія, завадостійкість і т. д. Основним завданням при проектуванні ТС різного призначення є забезпечення ефективності та якості функціонування ТС, а, отже, поліпшення таких характеристик ТС, як надійність, міцність, швидкодія і т. д. Одним з методів підвищення надійності, що широко використовується при проектуванні ТС, є резервування - метод підвищення надійності за рахунок введення надмірності. Під надмірністю розуміють додаткові засоби і можливості понад мінімально необхідних для забезпечення виконання ТС заданих функцій
 Основні етапи аналізу надійності ТС: - апріорний аналіз надійності ТС; - апостеріорний аналіз надійності ТС Апріорний аналіз надійності зазвичай проводиться на стадії проектування ТС. Цей аналіз - апріорі передбачає відомими кількісні характеристики надійності всіх використовуваних елементів системи. Для елементів (особливо нових), у яких ще немає достатніх кількісних характеристик надійності, їх задають за аналогією з характеристиками аналогічних елементів, що застосовуються у ТС Апріорний аналіз базується на апріорних (імовірнісних) характеристиках надійності, які лише приблизно відображають справжні процеси в апаратурі ТС. Цей аналіз дозволяє на стадії проектування виявити слабкі з точки зору надійності місця в конструкції, вжити необхідних заходів щодо їх усунення, а так само відвернути незадовільні варіанти побудови ТС. Тому апріорний аналіз (або розрахунок) надійності має суттєве значення в практиці проектування ТС і становить невід'ємну частину технічних проектів
Основні етапи аналізу надійності ТС: - апріорний аналіз надійності ТС; - апостеріорний аналіз надійності ТС Апріорний аналіз надійності зазвичай проводиться на стадії проектування ТС. Цей аналіз - апріорі передбачає відомими кількісні характеристики надійності всіх використовуваних елементів системи. Для елементів (особливо нових), у яких ще немає достатніх кількісних характеристик надійності, їх задають за аналогією з характеристиками аналогічних елементів, що застосовуються у ТС Апріорний аналіз базується на апріорних (імовірнісних) характеристиках надійності, які лише приблизно відображають справжні процеси в апаратурі ТС. Цей аналіз дозволяє на стадії проектування виявити слабкі з точки зору надійності місця в конструкції, вжити необхідних заходів щодо їх усунення, а так само відвернути незадовільні варіанти побудови ТС. Тому апріорний аналіз (або розрахунок) надійності має суттєве значення в практиці проектування ТС і становить невід'ємну частину технічних проектів
 Основні етапи аналізу надійності ТС Апостеріорний аналіз надійності проводять на підставі статистичної обробки експериментальних даних про працездатність і відновлюваність ТС, отриманих в процесі їх відпрацювання, випробувань і експлуатації. Метою таких випробувань є отримання оцінок показників надійності ТС і її елементів. Ці оцінки отримують методами математичної статистики за результатами спостережень (обмеженого обсягу). При цьому найчастіше припускають, що результати спостережень є випадковими величинами, які підпорядковуються певним законам розподілу з невідомими параметрами У даний час для деяких видів апаратури існує обов'язковий етап випробувань на надійність, що включає оцінки низки показників надійності Таким чином під аналізом надійності ТС розуміється визначення (обчислення) або конкретних значень показників надійності (апріорний аналіз), або статистичних оцінок показників надійності (апостеріорний аналіз)
Основні етапи аналізу надійності ТС Апостеріорний аналіз надійності проводять на підставі статистичної обробки експериментальних даних про працездатність і відновлюваність ТС, отриманих в процесі їх відпрацювання, випробувань і експлуатації. Метою таких випробувань є отримання оцінок показників надійності ТС і її елементів. Ці оцінки отримують методами математичної статистики за результатами спостережень (обмеженого обсягу). При цьому найчастіше припускають, що результати спостережень є випадковими величинами, які підпорядковуються певним законам розподілу з невідомими параметрами У даний час для деяких видів апаратури існує обов'язковий етап випробувань на надійність, що включає оцінки низки показників надійності Таким чином під аналізом надійності ТС розуміється визначення (обчислення) або конкретних значень показників надійності (апріорний аналіз), або статистичних оцінок показників надійності (апостеріорний аналіз)
 називають кількісні характеристики одної або декількох властивостей, що") Показники надійності ТС Показниками надійності (ПН) називають кількісні характеристики одної або декількох властивостей, що визначають надійність елемента (системи) Види показників надійності: -Одиничний ПН - це кількісна характеристика однієї з властивостей, що визначають надійність ТС (безвідмовність, довговічність, збережуваність і ремонтопридатність); -Комплексний ПН - це кількісна характеристика, що визначає дві або більше властивостей надійності ТС одночасно Вибір ПН залежить від призначення ТС і характеру її функціонування. При виборі ПН слід мати на увазі, що ці показники мають: - досить повно (адекватно) описувати властивості надійності системи, - бути зручними (конструктивними) для аналітичного розрахунку та експериментальної перевірки за результатами випробувань, - повинні мати розумний фізичний зміст (інтерпретованими), - допускати можливість переходу до показників якості та ефективності Кількісна оцінка надійності елементів ТС і ТС в цілому проводиться зазвичай за допомогою одиничних ПН безвідмовності, відновлюваності та довговічності, а також комплексних ПН, що визначають властивості безвідмовності і відновлюваності
Показники надійності ТС Показниками надійності (ПН) називають кількісні характеристики одної або декількох властивостей, що визначають надійність елемента (системи) Види показників надійності: -Одиничний ПН - це кількісна характеристика однієї з властивостей, що визначають надійність ТС (безвідмовність, довговічність, збережуваність і ремонтопридатність); -Комплексний ПН - це кількісна характеристика, що визначає дві або більше властивостей надійності ТС одночасно Вибір ПН залежить від призначення ТС і характеру її функціонування. При виборі ПН слід мати на увазі, що ці показники мають: - досить повно (адекватно) описувати властивості надійності системи, - бути зручними (конструктивними) для аналітичного розрахунку та експериментальної перевірки за результатами випробувань, - повинні мати розумний фізичний зміст (інтерпретованими), - допускати можливість переходу до показників якості та ефективності Кількісна оцінка надійності елементів ТС і ТС в цілому проводиться зазвичай за допомогою одиничних ПН безвідмовності, відновлюваності та довговічності, а також комплексних ПН, що визначають властивості безвідмовності і відновлюваності
 або ймовірність безвідмовної") Показники надійності ТС Основною кількісною характеристикою надійності є функція надійності P(t) або ймовірність безвідмовної роботи (скорочено надійність), що за визначенням дорівнює ймовірності того, що в заданому інтервалі часу або в межах заданого напрацювання при заданих режимах і умовах експлуатації у системі не виникає відмов, тобто P(t) = W {T>t}, де T - час безвідмовної роботи системи, t - заданий час, W{A} ймовірність події А, яка в даному випадку полягає в тому, що T>t >0 Вважаючи, що в момент включення ТС є працездатною, тобто P(0)= 1, функція P(t) монотонно убуває від 1 до 0. При цьому цілком очевидно, що P(∞)= 0, тобто будь-яка ТС при t → + ∞ з часом відмовить За аналогією з функцією надійності вводиться функція ненадійності, або ймовірність відмови (скорочено ненадійність): Q(t) = W {T≤t} Безпосередньо з визначення цих функцій випливає, що P(t) + Q(t) =1, 0 ≤ P(t) ≤ 1, 0 ≤ Q(t) ≤ 1, P(t 2)
Показники надійності ТС Основною кількісною характеристикою надійності є функція надійності P(t) або ймовірність безвідмовної роботи (скорочено надійність), що за визначенням дорівнює ймовірності того, що в заданому інтервалі часу або в межах заданого напрацювання при заданих режимах і умовах експлуатації у системі не виникає відмов, тобто P(t) = W {T>t}, де T - час безвідмовної роботи системи, t - заданий час, W{A} ймовірність події А, яка в даному випадку полягає в тому, що T>t >0 Вважаючи, що в момент включення ТС є працездатною, тобто P(0)= 1, функція P(t) монотонно убуває від 1 до 0. При цьому цілком очевидно, що P(∞)= 0, тобто будь-яка ТС при t → + ∞ з часом відмовить За аналогією з функцією надійності вводиться функція ненадійності, або ймовірність відмови (скорочено ненадійність): Q(t) = W {T≤t} Безпосередньо з визначення цих функцій випливає, що P(t) + Q(t) =1, 0 ≤ P(t) ≤ 1, 0 ≤ Q(t) ≤ 1, P(t 2)
=1, Q(0)=0, Р(∞)=0, Q(∞)=1,") Показники надійності ТС В теорії надійності розглядаються системи для яких Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1, (2) тобто системи, що справні в початковий момент часу t=0 і, крім того, час роботи цих систем скінченний З теорії ймовірностей відомо, що функції вигляду W {T≤t} є функціями розподілу випадкової величини T. Отже, ненадійність Q(t) є функцією розподілу часу безвідмовної роботи системи. Похідну від цієї функції називають щільністю f(t) розподілу часу безвідмовної роботи (іноді – частотою відмов) f(t) = d. Q(t)/dt = - d. P(t)/dt (3) Зручною для використання в розрахунках характеристикою надійності є інтенсивність відмов λ(t), яка за визначенням дорівнює відношенню f(t) до P(t) λ(t) = f(t) / P(t) (4)
Показники надійності ТС В теорії надійності розглядаються системи для яких Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1, (2) тобто системи, що справні в початковий момент часу t=0 і, крім того, час роботи цих систем скінченний З теорії ймовірностей відомо, що функції вигляду W {T≤t} є функціями розподілу випадкової величини T. Отже, ненадійність Q(t) є функцією розподілу часу безвідмовної роботи системи. Похідну від цієї функції називають щільністю f(t) розподілу часу безвідмовної роботи (іноді – частотою відмов) f(t) = d. Q(t)/dt = - d. P(t)/dt (3) Зручною для використання в розрахунках характеристикою надійності є інтенсивність відмов λ(t), яка за визначенням дорівнює відношенню f(t) до P(t) λ(t) = f(t) / P(t) (4)
 і (4) одержуємо: λ(t) Р(t) = f(t) =") Показники надійності ТС 3 урахуванням (3) і (4) одержуємо: λ(t) Р(t) = f(t) = - d. P(t)/dt, d. P(t)/P(t) = - λ(t) dt, t Р(t) = C exp{- ∫ λ(t)dt }, де С – постійна інтегрування 0 Беручи до уваги (2): Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1, отримуємо: t Р(t) = exp{- ∫λ(t)dt } (5) 0 Інтенсивність відмов λ(t) або λ(t)-характеристики є зручним інстументом для розрахунку надійності ТС через їх адитивність. У загальному випадку, коли система складається з n елементів, інтенсивність відмов системи λ(t) припущеннях, що відмови елементів є незалежними і відмова системи настає при відмові, принаймні, одного елемента, дорівнює сумі інтенсивностей λi(t) відмов елементів: n λ(t) = ∑ λi(t) i=1
Показники надійності ТС 3 урахуванням (3) і (4) одержуємо: λ(t) Р(t) = f(t) = - d. P(t)/dt, d. P(t)/P(t) = - λ(t) dt, t Р(t) = C exp{- ∫ λ(t)dt }, де С – постійна інтегрування 0 Беручи до уваги (2): Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1, отримуємо: t Р(t) = exp{- ∫λ(t)dt } (5) 0 Інтенсивність відмов λ(t) або λ(t)-характеристики є зручним інстументом для розрахунку надійності ТС через їх адитивність. У загальному випадку, коли система складається з n елементів, інтенсивність відмов системи λ(t) припущеннях, що відмови елементів є незалежними і відмова системи настає при відмові, принаймні, одного елемента, дорівнює сумі інтенсивностей λi(t) відмов елементів: n λ(t) = ∑ λi(t) i=1
 - (5) можна визначити взаємозв'язок між P(t), Q(t),") Показники надійності ТС Базуючись на (1) - (5) можна визначити взаємозв'язок між P(t), Q(t), f(t), λ(t): t t P(t) = 1 - Q(t) = 1 - ∫f(t)dt = exp{- ∫λ(t)dt } 0 (6) 0 t f(t) = d. Q(t)/dt = - d. P(t)/dt = λ(t) exp{- ∫λ(t)dt } (7) 0 t t Q(t) = 1 - P(t) = ∫f(t)dt = 1 - exp{- ∫λ(t)dt } 0 (8) 0 t λ(t)= f(t) / [1 - ∫f(t)dt] = (- d. P(t)/dt) / P(t) = (d. Q(t)/dt) / [1 - Q(t)] (9) 0
Показники надійності ТС Базуючись на (1) - (5) можна визначити взаємозв'язок між P(t), Q(t), f(t), λ(t): t t P(t) = 1 - Q(t) = 1 - ∫f(t)dt = exp{- ∫λ(t)dt } 0 (6) 0 t f(t) = d. Q(t)/dt = - d. P(t)/dt = λ(t) exp{- ∫λ(t)dt } (7) 0 t t Q(t) = 1 - P(t) = ∫f(t)dt = 1 - exp{- ∫λ(t)dt } 0 (8) 0 t λ(t)= f(t) / [1 - ∫f(t)dt] = (- d. P(t)/dt) / P(t) = (d. Q(t)/dt) / [1 - Q(t)] (9) 0
, Q(t), f(t), λ(t) в теорії надійності застосовуються") Показники надійності ТС Крім функціональних характеристик P(t), Q(t), f(t), λ(t) в теорії надійності застосовуються числові показники: - напрацювання на відмову T 0 ; - дисперсія часу безвідмовної роботи системи σ2 ; - ймовірність P(t 0) безвідмовної роботи за деякий час t 0 ; - ймовірність відмов за одиницю часу (ефективна інтенсивність відмов λе) - гарантований технічний ресурс tγ Напрацювання на відмову T 0 визначається як математичне сподівання випадкової величини Т (час безвідмовної роботи системи) ∞ T 0 = М[t f(t) ] = ∫ t f(t)dt 0 Інтегруючи частинами з урахуванням (2) [Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1]: ∞ ∞ ∞ T 0 = - t P(t)| + ∫ P(t)dt = ∫ P(t)dt 0 При λ(t)= const , ∞ 0 P(t) = exp{- λt } T 0 = ∫ exp{- λt } dt = 1/λ, 0 0 (10) (11) P(t) = exp{- t / T 0} (12)
Показники надійності ТС Крім функціональних характеристик P(t), Q(t), f(t), λ(t) в теорії надійності застосовуються числові показники: - напрацювання на відмову T 0 ; - дисперсія часу безвідмовної роботи системи σ2 ; - ймовірність P(t 0) безвідмовної роботи за деякий час t 0 ; - ймовірність відмов за одиницю часу (ефективна інтенсивність відмов λе) - гарантований технічний ресурс tγ Напрацювання на відмову T 0 визначається як математичне сподівання випадкової величини Т (час безвідмовної роботи системи) ∞ T 0 = М[t f(t) ] = ∫ t f(t)dt 0 Інтегруючи частинами з урахуванням (2) [Р(0)=1, Q(0)=0, Р(∞)=0, Q(∞)=1]: ∞ ∞ ∞ T 0 = - t P(t)| + ∫ P(t)dt = ∫ P(t)dt 0 При λ(t)= const , ∞ 0 P(t) = exp{- λt } T 0 = ∫ exp{- λt } dt = 1/λ, 0 0 (10) (11) P(t) = exp{- t / T 0} (12)
 припускалось, що система функціонує за час t,") Показники надійності ТС При виведені формули (10) припускалось, що система функціонує за час t, який змінюється від 0 до нескінченності. Однак багато ТС мають заданий технічний ресурс Тр, а тому працюють в інтервалі часу від 0 до Тр. Для таких систем Т 0 варто визначати за формулою: Тр ∞ 0 Тр T 0 = ∫ t f(t)dt + ∫ Тр f(t)dt Після необхідних перетворень з урахуванням Р(∞)=0 Тр T 0 = ∫ P(t) dt 0 У разі потреби визначити надійність ТС в інтервалі (t, t 1), якщо відомо, що система працювала безвідмовно до моменту t 1, то ймовірність безвідмовної роботи на цьому інтервалі при експоненціальній функції надійності P(t) дорівнює: t P(t, t 1) = exp{- ∫ λt dt}, t 1
Показники надійності ТС При виведені формули (10) припускалось, що система функціонує за час t, який змінюється від 0 до нескінченності. Однак багато ТС мають заданий технічний ресурс Тр, а тому працюють в інтервалі часу від 0 до Тр. Для таких систем Т 0 варто визначати за формулою: Тр ∞ 0 Тр T 0 = ∫ t f(t)dt + ∫ Тр f(t)dt Після необхідних перетворень з урахуванням Р(∞)=0 Тр T 0 = ∫ P(t) dt 0 У разі потреби визначити надійність ТС в інтервалі (t, t 1), якщо відомо, що система працювала безвідмовно до моменту t 1, то ймовірність безвідмовної роботи на цьому інтервалі при експоненціальній функції надійності P(t) дорівнює: t P(t, t 1) = exp{- ∫ λt dt}, t 1
= const , P(t, t 1) = exp{- λ(t -") Показники надійності ТС При λ(t)= const , P(t, t 1) = exp{- λ(t - t 1)}, тобто за таких умов ймовірність безвідмовної роботи ТС не залежить від того, скільки часу система безвідмовно відпрацювала. Можна показати також, що якщо надійність системи не залежить від того, скільки вона вже безвідмовно відпрацювала, то функція надійності такої системи буде обов'язково експоненціальною, тобто експоненціальна функція надійності є єдиною, що має цю властивість. Таким чином, експоненціальний закон розподілу часу безвідмовної роботи не враховує передісторії. Теоретично цей закон може бути застосований тільки до виробів, що не піддаються зносу в процесі експлуатації і старінню з часом. Але, оскільки, таких виробів не існує, то на практиці експоненціальний розподіл застосовують у випадках, коли процеси старіння і зносу в системах протікають достатньо повільно і, крім того, аналізується порівняно невеликий період "життя" виробу.
Показники надійності ТС При λ(t)= const , P(t, t 1) = exp{- λ(t - t 1)}, тобто за таких умов ймовірність безвідмовної роботи ТС не залежить від того, скільки часу система безвідмовно відпрацювала. Можна показати також, що якщо надійність системи не залежить від того, скільки вона вже безвідмовно відпрацювала, то функція надійності такої системи буде обов'язково експоненціальною, тобто експоненціальна функція надійності є єдиною, що має цю властивість. Таким чином, експоненціальний закон розподілу часу безвідмовної роботи не враховує передісторії. Теоретично цей закон може бути застосований тільки до виробів, що не піддаються зносу в процесі експлуатації і старінню з часом. Але, оскільки, таких виробів не існує, то на практиці експоненціальний розподіл застосовують у випадках, коли процеси старіння і зносу в системах протікають достатньо повільно і, крім того, аналізується порівняно невеликий період "життя" виробу.
 Показники надійності ТС Для оцінки точності експериментальних даних про надійність застосовується дисперсія часу безвідмовної роботи системи: 2 ∞ 2 ∞ σ = ∫(t - T 0) f(t) dt = ∫ t f(t) dt – (T 0) = 2 ∫ t P(t) dt - (T 0)2 0 0 Для експоненціального закону 2 ∞ σ =2∫(t exp{- λt}) dt - 1/λ 2 = 2 /λ 2 - 1/λ 2 = 1/λ 2 0 Оцінку надійності ТС іноді здійснюють через ймовірність P(t 0) безвідмовної роботи за деякий час t 0. Для експоненціального закону при t 0 <
Показники надійності ТС Для оцінки точності експериментальних даних про надійність застосовується дисперсія часу безвідмовної роботи системи: 2 ∞ 2 ∞ σ = ∫(t - T 0) f(t) dt = ∫ t f(t) dt – (T 0) = 2 ∫ t P(t) dt - (T 0)2 0 0 Для експоненціального закону 2 ∞ σ =2∫(t exp{- λt}) dt - 1/λ 2 = 2 /λ 2 - 1/λ 2 = 1/λ 2 0 Оцінку надійності ТС іноді здійснюють через ймовірність P(t 0) безвідмовної роботи за деякий час t 0. Для експоненціального закону при t 0 <
 Показники надійності ТС Ймовірність відмов за одиницю часу можна інтерпретувати як ефективну інтенсивність відмов λе. При малих значеннях t 0 і постійній λ має місце: λе = [1 - P(t 0)] / t 0 ≈ [1 – (1 - λt 0)] / t 0 = λ Гарантований технічний ресурс tγ визначають з рівняння P(tγ) = γ , де γ - гарантована ймовірність. При λ = const P(tγ) = exp{- λtγ} = γ tγ = - T 0 ln γ Беручи до уваги близькість γ до одиниці (наприклад γ=0, 9) tγ = - T 0 ln(1 – (1 - γ)) ≈ (1 - γ)T 0 Тобто при γ=0, 9 гарантований ресурс становить лише 0, 1 від T 0.
Показники надійності ТС Ймовірність відмов за одиницю часу можна інтерпретувати як ефективну інтенсивність відмов λе. При малих значеннях t 0 і постійній λ має місце: λе = [1 - P(t 0)] / t 0 ≈ [1 – (1 - λt 0)] / t 0 = λ Гарантований технічний ресурс tγ визначають з рівняння P(tγ) = γ , де γ - гарантована ймовірність. При λ = const P(tγ) = exp{- λtγ} = γ tγ = - T 0 ln γ Беручи до уваги близькість γ до одиниці (наприклад γ=0, 9) tγ = - T 0 ln(1 – (1 - γ)) ≈ (1 - γ)T 0 Тобто при γ=0, 9 гарантований ресурс становить лише 0, 1 від T 0.
 Показники надійності ТС Розглянуті характеристики надійності можна застосовувати як для невідновлюваних, так і для відновлюваних систем. Однак, відновлювані ТС вони характеризують лише від початку експлуатації до першої відмови. Оскільки відновлювані системи після відмови ремонтуються, в результаті чого їх працездатність відновлюється, то зазначених характеристик недостатньо для повного опису надійності таких систем. Постає необхідність охарактеризувати також процес відновлення (ремонту) системи. З цією метою вводять функцію ремонту R, яка дорівнює ймовірності того, що час відновлення tв буде менше заданого часу t, тобто R(t) = W{tв ≤ t} Звідси випливає, що R(t) є функцією розподілу часу відновлення.
Показники надійності ТС Розглянуті характеристики надійності можна застосовувати як для невідновлюваних, так і для відновлюваних систем. Однак, відновлювані ТС вони характеризують лише від початку експлуатації до першої відмови. Оскільки відновлювані системи після відмови ремонтуються, в результаті чого їх працездатність відновлюється, то зазначених характеристик недостатньо для повного опису надійності таких систем. Постає необхідність охарактеризувати також процес відновлення (ремонту) системи. З цією метою вводять функцію ремонту R, яка дорівнює ймовірності того, що час відновлення tв буде менше заданого часу t, тобто R(t) = W{tв ≤ t} Звідси випливає, що R(t) є функцією розподілу часу відновлення.
, розподілу часу відновлення λ(t) вводяться функції") Показники надійності ТС За аналогією з функціями f(t), розподілу часу відновлення λ(t) вводяться функції щільності r(t) = d. R(t)/dt та інтенсивності ремонту μ(t) = r(t) / [1 - R(t)] Аналогічно з функцією P(t) можна показати, що t R(t) = exp{- ∫ μ(t) dt}, 0 а середній час відновлення Tв: ∞ ∞ Tв = ∫ t r(t)dt = ∫(1 - R(t))dt 0 0 У разі якщо μ(t) = const R(t)= 1 - exp{- μt }; Tв = μ-1
Показники надійності ТС За аналогією з функціями f(t), розподілу часу відновлення λ(t) вводяться функції щільності r(t) = d. R(t)/dt та інтенсивності ремонту μ(t) = r(t) / [1 - R(t)] Аналогічно з функцією P(t) можна показати, що t R(t) = exp{- ∫ μ(t) dt}, 0 а середній час відновлення Tв: ∞ ∞ Tв = ∫ t r(t)dt = ∫(1 - R(t))dt 0 0 У разі якщо μ(t) = const R(t)= 1 - exp{- μt }; Tв = μ-1
, яка дорівнює ймовірності того,") Показники надійності ТС Працездатність відновлювальної системи характеризує функція готовності G(t), яка дорівнює ймовірності того, що в момент часу система є справною. Ймовірність того, що в будь-який момент часу t система не буде працездатною визначається функцією простою g(t): t g(t)= 1 - G(t) може бути отримана з характеристик безвідмовності P(t) та відновлюваності R(t). Розглянемо випадок коли λ(t), μ(t) = const. Визначимо ймовірність G(t + Δt) того, що ТС буде справною на момент часу (t + Δt). Це відбувається в результаті однієї з двох несумісних подій: t і продовжує знаходитися в цьому стані до 1) ТС справна на моменту (t + Δt); 2) ТС несправна у момент t, але за час Δt відновлюється.
Показники надійності ТС Працездатність відновлювальної системи характеризує функція готовності G(t), яка дорівнює ймовірності того, що в момент часу система є справною. Ймовірність того, що в будь-який момент часу t система не буде працездатною визначається функцією простою g(t): t g(t)= 1 - G(t) може бути отримана з характеристик безвідмовності P(t) та відновлюваності R(t). Розглянемо випадок коли λ(t), μ(t) = const. Визначимо ймовірність G(t + Δt) того, що ТС буде справною на момент часу (t + Δt). Це відбувається в результаті однієї з двох несумісних подій: t і продовжує знаходитися в цьому стані до 1) ТС справна на моменту (t + Δt); 2) ТС несправна у момент t, але за час Δt відновлюється.
 – експоненціальна, то (як показано раніше) ймовірність") Показники надійності ТС Оскільки функція надійності P(t) – експоненціальна, то (як показано раніше) ймовірність безвідмовної роботи ТС на відрізку (t, t+Δt) залежить лише від Δt, тобто: P(t, t+Δt) = exp{- λΔt} ≈ 1 – λΔt Таким чином ймовірність першої події дорівнює G(t) (1 – λΔt). Аналогічно можна показати, що при експоненціальному розподілі часу ремонту ймовірність завершення ремонту за час Δt залежить лише від Δt, а саме: R(t+Δt, t) = 1 - exp{- μ Δt} ≈ μ Δt. Відповідно ймовірність другої події дорівнює (1 – G(t)) μΔt. Тоді шукана ймовірність G(t +Δt) за умови несумісності зазначених двох подій: G(t +Δt) = G(t) (1 – λΔt) + (1 – G(t)) μΔt,
Показники надійності ТС Оскільки функція надійності P(t) – експоненціальна, то (як показано раніше) ймовірність безвідмовної роботи ТС на відрізку (t, t+Δt) залежить лише від Δt, тобто: P(t, t+Δt) = exp{- λΔt} ≈ 1 – λΔt Таким чином ймовірність першої події дорівнює G(t) (1 – λΔt). Аналогічно можна показати, що при експоненціальному розподілі часу ремонту ймовірність завершення ремонту за час Δt залежить лише від Δt, а саме: R(t+Δt, t) = 1 - exp{- μ Δt} ≈ μ Δt. Відповідно ймовірність другої події дорівнює (1 – G(t)) μΔt. Тоді шукана ймовірність G(t +Δt) за умови несумісності зазначених двох подій: G(t +Δt) = G(t) (1 – λΔt) + (1 – G(t)) μΔt,
 - G(t)) / Δt = - λG(t) +") Показники надійності ТС звідки: (G(t +Δt) - G(t)) / Δt = - λG(t) + μ(1 – G(t)) або G'(t) = μ - (λ+ μ)G(t) Розв'язок цього диференціального рівняння має вигляд G(t) = [μ / (μ+λ)] + C exp{- (λ +μ)t}, де C – постійна інтегрування. Якщо ТС при t=0 завжди справна, то G(t=0) = 1. Отже G(t) = [μ / (μ+λ)] + [λ / (μ+λ)] exp{- (λ +μ)t}, (*) Якщо ТС при t=0 завжди несправна, то G(t=0) G(t) = [μ / (μ+λ)][1 - exp{- (λ +μ)t}] = 0 та (**)
Показники надійності ТС звідки: (G(t +Δt) - G(t)) / Δt = - λG(t) + μ(1 – G(t)) або G'(t) = μ - (λ+ μ)G(t) Розв'язок цього диференціального рівняння має вигляд G(t) = [μ / (μ+λ)] + C exp{- (λ +μ)t}, де C – постійна інтегрування. Якщо ТС при t=0 завжди справна, то G(t=0) = 1. Отже G(t) = [μ / (μ+λ)] + [λ / (μ+λ)] exp{- (λ +μ)t}, (*) Якщо ТС при t=0 завжди несправна, то G(t=0) G(t) = [μ / (μ+λ)][1 - exp{- (λ +μ)t}] = 0 та (**)
 та (**) випливає, що незалежно від початкового стану") Показники надійності ТС З виразів (*) та (**) випливає, що незалежно від початкового стану системи при t → ∞, : G(t) → μ/(λ+μ). Середній час справного стану Tс системи за певний час T знаходиться шляхом визначення суми G(t) на всьому інтервалі часу: Т Tс = ∫G(t) dt = [μ/(λ+μ)]T + λ/(λ+μ)2 - [λ/(λ+μ)2] exp{- (λ +μ)T}, 0 При досить великому T система буде знаходитися у справному стані в середньому такий час: Tс/ T = μ/(λ+μ) + λ/ [(λ+μ)2 T] - λ / [(λ+μ)2 T ] exp{- (λ +μ)T}, або Tс/ T ≈ μ/(λ+μ) = Кг , де Кг – за визначенням коефіцієнт готовності системи.
Показники надійності ТС З виразів (*) та (**) випливає, що незалежно від початкового стану системи при t → ∞, : G(t) → μ/(λ+μ). Середній час справного стану Tс системи за певний час T знаходиться шляхом визначення суми G(t) на всьому інтервалі часу: Т Tс = ∫G(t) dt = [μ/(λ+μ)]T + λ/(λ+μ)2 - [λ/(λ+μ)2] exp{- (λ +μ)T}, 0 При досить великому T система буде знаходитися у справному стані в середньому такий час: Tс/ T = μ/(λ+μ) + λ/ [(λ+μ)2 T] - λ / [(λ+μ)2 T ] exp{- (λ +μ)T}, або Tс/ T ≈ μ/(λ+μ) = Кг , де Кг – за визначенням коефіцієнт готовності системи.
 Показники надійності ТС У разі, якщо λ або μ не є постійними величинами, коефіцієнт готовності системи визначається як: Кг = T 0 /(T 0 + Tв), де T 0 – напрацювання на відмову; Tв – середній час відновлення ТС. Отже коефіцієнт готовності системи – це відношення тривалості безвідмовної роботи системи за даний період експлуатації до суми тривалості безвідмовної роботи і тривалості ремонтів за той же період експлуатації.
Показники надійності ТС У разі, якщо λ або μ не є постійними величинами, коефіцієнт готовності системи визначається як: Кг = T 0 /(T 0 + Tв), де T 0 – напрацювання на відмову; Tв – середній час відновлення ТС. Отже коефіцієнт готовності системи – це відношення тривалості безвідмовної роботи системи за даний період експлуатації до суми тривалості безвідмовної роботи і тривалості ремонтів за той же період експлуатації.
 Залежність інтенсивності відмов від часу Для більшості ТС і, зокрема, систем управління характерні три види залежностей інтенсивності відмов (ІВ) від часу, які відповідають трьом «періодам життя» цих пристроїв.
Залежність інтенсивності відмов від часу Для більшості ТС і, зокрема, систем управління характерні три види залежностей інтенсивності відмов (ІВ) від часу, які відповідають трьом «періодам життя» цих пристроїв.
 монотонно зменшується. Це відповідає періоду припрацювання,") I. Перший вид характеристики. Тут інтенсивність відмов (ІВ) монотонно зменшується. Це відповідає періоду припрацювання, в якому проявляються дефекти технології та виготовлення і які є не властивими для конструкції ТС. II. Другий вид характеристики. Тут ІВ залишається приблизно постійною. Це відповідає так званому періоду нормальної експлуатації. У цей період, як правило, виникають раптові відмови, властиві самій конструкції. III. Третій вид характеристики. Тут ІВ постійно зростає. Це відповідає періоду зносу, викликаного процесами старіння. У цей період виникають, головним чином поступові відмови. Як вже зазначалося, апріорний (імовірнісний) аналіз надійності ТС полягає, в основному, у визначенні конкретних значень ПН по аналітичним виразами, що зв'язує ці показники надійності один з одним. При цьому розподіл ймовірностей безвідмовної роботи ТС від моменту включення до моменту відмови, яке називається зазвичай математичної моделлю безвідмовності, у різних ТС різний. Іншими словами, час між сусідніми відмовами для елементів, вузлів, блоків, підсистем і систем є безперервною випадковою величиною, яка характеризується певним законом розподілу, що залежить і від «періодів життя» ТС (див. рис. ), і від її окремих вузлів, блоків і т. д. , і від типу самої ТС в цілому. Виходячи з цього слід розглянути закони розподілу неперервних випадкових величин, що найчастіше використовуються для розрахунку надійності ТС.
I. Перший вид характеристики. Тут інтенсивність відмов (ІВ) монотонно зменшується. Це відповідає періоду припрацювання, в якому проявляються дефекти технології та виготовлення і які є не властивими для конструкції ТС. II. Другий вид характеристики. Тут ІВ залишається приблизно постійною. Це відповідає так званому періоду нормальної експлуатації. У цей період, як правило, виникають раптові відмови, властиві самій конструкції. III. Третій вид характеристики. Тут ІВ постійно зростає. Це відповідає періоду зносу, викликаного процесами старіння. У цей період виникають, головним чином поступові відмови. Як вже зазначалося, апріорний (імовірнісний) аналіз надійності ТС полягає, в основному, у визначенні конкретних значень ПН по аналітичним виразами, що зв'язує ці показники надійності один з одним. При цьому розподіл ймовірностей безвідмовної роботи ТС від моменту включення до моменту відмови, яке називається зазвичай математичної моделлю безвідмовності, у різних ТС різний. Іншими словами, час між сусідніми відмовами для елементів, вузлів, блоків, підсистем і систем є безперервною випадковою величиною, яка характеризується певним законом розподілу, що залежить і від «періодів життя» ТС (див. рис. ), і від її окремих вузлів, блоків і т. д. , і від типу самої ТС в цілому. Виходячи з цього слід розглянути закони розподілу неперервних випадкових величин, що найчастіше використовуються для розрахунку надійності ТС.
 Закони розподілу неперервних випадкових величин ДСТУ рекомендують використовувати наступні п'ять теоретичних функцій надійності , позначені як Е, DМ, DN, LN, W, : Е - експоненціальний розподіл; DМ - дифузійний монотонний розподіл; DN - дифузійний немонотонний розподіл; LN – логарифмічно нормальний розподіл; W – розподіл Вейбула. Крім того для створення моделей надійності ТС залежно від конкретних умов можуть застосовуватися: - розподіл Релея; - розподіл Ерланга; - рівномірний розподіл; - Гама-розподіл; - трикутний (Сімпсона) розподіл; - F – та 2 – розподіл; - нормальний та зрізаний нормальний розподіл; - розподіли дискретних випадкових величин (біноміальний розподіл, розподіл Пуассона, геометричний розподіл)
Закони розподілу неперервних випадкових величин ДСТУ рекомендують використовувати наступні п'ять теоретичних функцій надійності , позначені як Е, DМ, DN, LN, W, : Е - експоненціальний розподіл; DМ - дифузійний монотонний розподіл; DN - дифузійний немонотонний розподіл; LN – логарифмічно нормальний розподіл; W – розподіл Вейбула. Крім того для створення моделей надійності ТС залежно від конкретних умов можуть застосовуватися: - розподіл Релея; - розподіл Ерланга; - рівномірний розподіл; - Гама-розподіл; - трикутний (Сімпсона) розподіл; - F – та 2 – розподіл; - нормальний та зрізаний нормальний розподіл; - розподіли дискретних випадкових величин (біноміальний розподіл, розподіл Пуассона, геометричний розподіл)
 Закони розподілу неперервних випадкових величин Вибір закону розподілу визначається у відповідності до характеристик конкретних ТС та для функцій надійності Е, DМ, DN, LN, W базується на таких особливостях: Експоненціальний розподіл (Е) використовується для систем, що не старіють і не зношуються. Оскільки таких ТС практично не існує, ДСТУ рекомендують застосовувати Е - розподіл тільки для порівняльних оцінок надійності. DМ - дифузійний монотонний розподіл використовується для систем, де переважають відмови, причинами яких є процеси зношування, втоми і корозії. Для цього розподілу: f(t) = (t + )/[2νt (2 π t)0, 5 ] exp{-(t - )2/(2 ν 2 t)}, P(t) = Φ{(t - )/ [ν( t)0, 5]}, T 0 = (1 + 0, 5 ν 2), де та ν – параметри масштабу та форми, а Φ{х} табульована функція x Φ{х} = 1/[(2 π t)0, 5 ] ∫ exp{-u 2/2}du -∞
Закони розподілу неперервних випадкових величин Вибір закону розподілу визначається у відповідності до характеристик конкретних ТС та для функцій надійності Е, DМ, DN, LN, W базується на таких особливостях: Експоненціальний розподіл (Е) використовується для систем, що не старіють і не зношуються. Оскільки таких ТС практично не існує, ДСТУ рекомендують застосовувати Е - розподіл тільки для порівняльних оцінок надійності. DМ - дифузійний монотонний розподіл використовується для систем, де переважають відмови, причинами яких є процеси зношування, втоми і корозії. Для цього розподілу: f(t) = (t + )/[2νt (2 π t)0, 5 ] exp{-(t - )2/(2 ν 2 t)}, P(t) = Φ{(t - )/ [ν( t)0, 5]}, T 0 = (1 + 0, 5 ν 2), де та ν – параметри масштабу та форми, а Φ{х} табульована функція x Φ{х} = 1/[(2 π t)0, 5 ] ∫ exp{-u 2/2}du -∞
 Закони розподілу неперервних випадкових величин DN - дифузійний немонотонний розподіл застосовується для електронних схем і систем, що складаються з електротехнічних виробів і механічних елементів, основною причиною відмов яких є процеси старіння, втоми та різні інші процеси електромагнітної природи. LN – логарифмічно нормальний розподіл використовується в системах, де основною причиною відмов є втома, зумовлена періодичними навантаженнями. W – розподіл Вейбула застосовується для систем, моделювання надійності яких недостатньо точно описується розподілами Е, DМ, DN та LN. Так композиція трьох розподілів Вейбула (KW), яке має вигляд P(t) =exp{-(t/ 1)ν 1 – λt – (t/ 2 )ν 2}, дозволяє описувати надійність елементів і систем, що мають усі стадії “життєвого циклу”, а саме, припрацювання (0 <ν 1< 1), нормальну роботу (ν 1 = ν 2 = 1) та знос (ν 2 > 1)
Закони розподілу неперервних випадкових величин DN - дифузійний немонотонний розподіл застосовується для електронних схем і систем, що складаються з електротехнічних виробів і механічних елементів, основною причиною відмов яких є процеси старіння, втоми та різні інші процеси електромагнітної природи. LN – логарифмічно нормальний розподіл використовується в системах, де основною причиною відмов є втома, зумовлена періодичними навантаженнями. W – розподіл Вейбула застосовується для систем, моделювання надійності яких недостатньо точно описується розподілами Е, DМ, DN та LN. Так композиція трьох розподілів Вейбула (KW), яке має вигляд P(t) =exp{-(t/ 1)ν 1 – λt – (t/ 2 )ν 2}, дозволяє описувати надійність елементів і систем, що мають усі стадії “життєвого циклу”, а саме, припрацювання (0 <ν 1< 1), нормальну роботу (ν 1 = ν 2 = 1) та знос (ν 2 > 1)
 Закони розподілу неперервних випадкових величин Вибір найкращого наближення та оцінка правильності обраної гіпотези про функцію розподілу часу безвідмовної роботи здійснюють методами математичної статистики з використанням так званих критеріїв згоди. Найбільше поширення для цього одержали - критерій 2 Пірсона; - критерій Колмогорова. Основна ідея цих критеріїв згоди полягає в обчисленні ймовірності отриманої розбіжності між гістограмою функції Q(t) і обраним теоретичним законом розподілу. Якщо ця ймовірність виявляється досить великою (наприклад, більшою за 0, 25), то вважають, що прийнята гіпотеза про розподіл часу безвідмовної роботи не суперечить даним випробувань. Якщо ж вказана ймовірність мала, то гіпотезу відкидають випробовують по критерію згоди іншій теоретичний закон розподілу. Після визначення найбільш підходящої теоретичної функції надійності здійснюють оцінку її параметрів. Найкращу оцінку параметрів розподілу дає метод максимуму правдоподібності, суть якого полягає в наступному.
Закони розподілу неперервних випадкових величин Вибір найкращого наближення та оцінка правильності обраної гіпотези про функцію розподілу часу безвідмовної роботи здійснюють методами математичної статистики з використанням так званих критеріїв згоди. Найбільше поширення для цього одержали - критерій 2 Пірсона; - критерій Колмогорова. Основна ідея цих критеріїв згоди полягає в обчисленні ймовірності отриманої розбіжності між гістограмою функції Q(t) і обраним теоретичним законом розподілу. Якщо ця ймовірність виявляється досить великою (наприклад, більшою за 0, 25), то вважають, що прийнята гіпотеза про розподіл часу безвідмовної роботи не суперечить даним випробувань. Якщо ж вказана ймовірність мала, то гіпотезу відкидають випробовують по критерію згоди іншій теоретичний закон розподілу. Після визначення найбільш підходящої теоретичної функції надійності здійснюють оцінку її параметрів. Найкращу оцінку параметрів розподілу дає метод максимуму правдоподібності, суть якого полягає в наступному.
 Закони розподілу неперервних випадкових величин Значення оцінок параметрів розподілу знаходять з системи рівнянь W / ai =0, i = 1, 2, …, m, де W(*) – функція правдоподібності, яка дорівнює добутку N ймовірностей Wi = f(Xi, a 1, a 2, …, am)ΔX, Xi , i = 1, 2, …, N – отриманий в результаті випробувань ряд незалежних значень досліджуємої випадкової величини з щильністю ймовірностей f(Xi, a 1, a 2, …, am), ai – параметри розподілу. Іноді зручніше замість ймовірності W зручніше досліджувати на максимум функцію L= ln[W/(ΔX)N], а параметри ai знаходити з системи рівнянь L / ai =0, i = 1, 2, …, m, враховуючи, що корені обох систем рівнянь збігаються через монотонність функції логарифму.
Закони розподілу неперервних випадкових величин Значення оцінок параметрів розподілу знаходять з системи рівнянь W / ai =0, i = 1, 2, …, m, де W(*) – функція правдоподібності, яка дорівнює добутку N ймовірностей Wi = f(Xi, a 1, a 2, …, am)ΔX, Xi , i = 1, 2, …, N – отриманий в результаті випробувань ряд незалежних значень досліджуємої випадкової величини з щильністю ймовірностей f(Xi, a 1, a 2, …, am), ai – параметри розподілу. Іноді зручніше замість ймовірності W зручніше досліджувати на максимум функцію L= ln[W/(ΔX)N], а параметри ai знаходити з системи рівнянь L / ai =0, i = 1, 2, …, m, враховуючи, що корені обох систем рівнянь збігаються через монотонність функції логарифму.
 Експериментальне визначення показників надійності Забезпечення надійності виробів неможливе без достовірних даних про надійність їх елементів. Найбільш поширеним шляхом одержання таких даних є обробка інформації про відмови під час випробувань на надійність. Внаслідок цього всі провідні виробники електронного обладнання обов'язково мають випробувальні центри, в яких можуть одночасно випробовуватися близько 106 виробів. Види випробувань на надійність розділяють на дві основні групи: - визначальні випробування, та - контрольні випробування. В результаті проведення визначальних випробувань знаходять кількісні показники надійності. Мета контрольних випробувань - виявлення відповідності кількісних показників надійності вимогам технічних умов. Важливим при проведенні випробувань має відтворення факторів, що впливають на надійність ТС, вибір яких залежить від призначення і умов експлуатації випробовуваної системи. До найбільш важливих факторів, що враховуються при випробуваннях на надійність, відносять: тиск (високий, низький, вакуум); температуру (висока, низька, діапазон і швидкість зміни); тверді частинки (пісок, пил, град, сніг, метеорити); склад атмосфери (горючі і агресивні гази, аерозолі); радіація (сонячна, космічна, ядерна); вологість (вогкість, цвіль, зледеніння, дощ, туман); вібрації, шуми, ударні навантаження, звукові хвилі; фізичні поля (електромагнітні, гравітаційні).
Експериментальне визначення показників надійності Забезпечення надійності виробів неможливе без достовірних даних про надійність їх елементів. Найбільш поширеним шляхом одержання таких даних є обробка інформації про відмови під час випробувань на надійність. Внаслідок цього всі провідні виробники електронного обладнання обов'язково мають випробувальні центри, в яких можуть одночасно випробовуватися близько 106 виробів. Види випробувань на надійність розділяють на дві основні групи: - визначальні випробування, та - контрольні випробування. В результаті проведення визначальних випробувань знаходять кількісні показники надійності. Мета контрольних випробувань - виявлення відповідності кількісних показників надійності вимогам технічних умов. Важливим при проведенні випробувань має відтворення факторів, що впливають на надійність ТС, вибір яких залежить від призначення і умов експлуатації випробовуваної системи. До найбільш важливих факторів, що враховуються при випробуваннях на надійність, відносять: тиск (високий, низький, вакуум); температуру (висока, низька, діапазон і швидкість зміни); тверді частинки (пісок, пил, град, сніг, метеорити); склад атмосфери (горючі і агресивні гази, аерозолі); радіація (сонячна, космічна, ядерна); вологість (вогкість, цвіль, зледеніння, дощ, туман); вібрації, шуми, ударні навантаження, звукові хвилі; фізичні поля (електромагнітні, гравітаційні).
 Експериментальне визначення показників надійності В залежності від величини навантаження розрізняють: - випробування при номінальному навантаженні, тобто при нормальних умовах експлуатації; - прискорені випробування при граничному навантаженні, тобто у форсованому режимі роботи при граничному навантаженні, що призводить до більш швидкої появи відмов; - випробування на визначення допустимого навантаження. Метою цього виду випробувань є визначення величини навантаження, дія якого призводить за короткий час до відмови системи. Важливим при експериментальній оцінці надійності є план випробувань. Плани відрізняються один від одного трудомісткістю, тривалістю, точністю та іншими параметрами. ДСТУ встановлюють 13 подібних планів, в кожному з яких визначене – - число N об'єктів випробувань; - дії U, R або М, що виконуються при виникненні відмов: U - об'єкт, що відмовив, не відновлюють і не замінюють справним; R - об'єкт, що відмовив, замінюють новим; М - об'єкт, що відмовив, відновлюють в процесі випробувань; - критерії припинення випробувань.
Експериментальне визначення показників надійності В залежності від величини навантаження розрізняють: - випробування при номінальному навантаженні, тобто при нормальних умовах експлуатації; - прискорені випробування при граничному навантаженні, тобто у форсованому режимі роботи при граничному навантаженні, що призводить до більш швидкої появи відмов; - випробування на визначення допустимого навантаження. Метою цього виду випробувань є визначення величини навантаження, дія якого призводить за короткий час до відмови системи. Важливим при експериментальній оцінці надійності є план випробувань. Плани відрізняються один від одного трудомісткістю, тривалістю, точністю та іншими параметрами. ДСТУ встановлюють 13 подібних планів, в кожному з яких визначене – - число N об'єктів випробувань; - дії U, R або М, що виконуються при виникненні відмов: U - об'єкт, що відмовив, не відновлюють і не замінюють справним; R - об'єкт, що відмовив, замінюють новим; М - об'єкт, що відмовив, відновлюють в процесі випробувань; - критерії припинення випробувань.
![Експериментальне визначення показників надійності Умовні позначення окремих планів і їх короткий зміст наступні: [NUT]](https://present5.com/presentation/3/9825021_169571636.pdf-img/9825021_169571636.pdf-40.jpg "Експериментальне визначення показників надійності Умовні позначення окремих планів і їх короткий зміст наступні: [NUT]") Експериментальне визначення показників надійності Умовні позначення окремих планів і їх короткий зміст наступні: [NUT] – одночасно випробують N об’єктів, об’єкти, що відмовили під час випробування (ОВ), не відновлюють, не замінюють, випробування припиняється при досягненні напрацювання Т; [NUr] – теж, що і [NUT], але випробування припиняють, коли число ОВ досягло r (для r =N має місце різновид [NUN] плану; [NU(r, Т)] - теж, що і [NUT], але випробування припиняють, коли число ОВ досягне r або при досягненні напрацювання Т – в залежності від того, яка з цих умов буде виконана раніше; [NRT] - теж, що і [NUT], але ОВ замінюють новими; [NRr], [NR (r, Т)], [NМT] , [NМr] - інші приклади планів. У деяких планах об’єкти, що не відмовили, знімають з випробувань достроково, в тому числі з метою скорочення тривалості випробувань. Така дія носіть назву – цензурування. Обсяг випробувань при цьому визначається напрацюваннями на відмови та напрацюваннями до цензурування. Масив, що містить суму цих напрацювань по всіх випробуваних об’єктах, носить назву цензурованої вибірки.
Експериментальне визначення показників надійності Умовні позначення окремих планів і їх короткий зміст наступні: [NUT] – одночасно випробують N об’єктів, об’єкти, що відмовили під час випробування (ОВ), не відновлюють, не замінюють, випробування припиняється при досягненні напрацювання Т; [NUr] – теж, що і [NUT], але випробування припиняють, коли число ОВ досягло r (для r =N має місце різновид [NUN] плану; [NU(r, Т)] - теж, що і [NUT], але випробування припиняють, коли число ОВ досягне r або при досягненні напрацювання Т – в залежності від того, яка з цих умов буде виконана раніше; [NRT] - теж, що і [NUT], але ОВ замінюють новими; [NRr], [NR (r, Т)], [NМT] , [NМr] - інші приклади планів. У деяких планах об’єкти, що не відмовили, знімають з випробувань достроково, в тому числі з метою скорочення тривалості випробувань. Така дія носіть назву – цензурування. Обсяг випробувань при цьому визначається напрацюваннями на відмови та напрацюваннями до цензурування. Масив, що містить суму цих напрацювань по всіх випробуваних об’єктах, носить назву цензурованої вибірки.
,") Експериментальне визначення показників надійності По даним, отриманим при випробуваннях, визначаються експериментальні функції надійності: P(t), Q(t), f(t), λ(t): де n(t) Q(t)= n(t)/N, – число елементів, що відмовили за час t. Оскільки P(t)= 1 - Q(t), то P(t) ≈ [N - n(t)]/N f(t) = d. Q(t)/dt ≈ [n(t + Δt) - n(t)]/(N Δt) = Δn(t)/(N Δt) де Δn(t) λ(t) = f(t)/P(t) ≈ Δn(t)/(N - n(t))Δt), – число елементів, що відмовили за час від t до (t + Δt). В подальшому будується гістограма для λ(t), по якій визначають чи змінюється λ у часі або ж залишається постійною, тим самим з’ясовуючи на якому етапі “життєвого циклу” знаходиться система, що випробовувалась.
Експериментальне визначення показників надійності По даним, отриманим при випробуваннях, визначаються експериментальні функції надійності: P(t), Q(t), f(t), λ(t): де n(t) Q(t)= n(t)/N, – число елементів, що відмовили за час t. Оскільки P(t)= 1 - Q(t), то P(t) ≈ [N - n(t)]/N f(t) = d. Q(t)/dt ≈ [n(t + Δt) - n(t)]/(N Δt) = Δn(t)/(N Δt) де Δn(t) λ(t) = f(t)/P(t) ≈ Δn(t)/(N - n(t))Δt), – число елементів, що відмовили за час від t до (t + Δt). В подальшому будується гістограма для λ(t), по якій визначають чи змінюється λ у часі або ж залишається постійною, тим самим з’ясовуючи на якому етапі “життєвого циклу” знаходиться система, що випробовувалась.
 Вибір та обгрунтування показників надійності При проектуванні ТС необхідно вжити низку заходів для забезпечення її надійності. Основні них такі: 1. Вибір і обгрунтування принципів технічного обслуговування ТС; 2. Вибір основного показника надійності ТС; 3. Призначення норм надійності; 4. Розподіл норм надійності системи за елементами. Вибір і обгрунтування принципів техобслуговування (ТО) Розрізняють три основні види технічного обслуговування і ремонту: 1. За календарними строками незалежно від напрацювання об'єкта. 2. За виробленням встановлених заздалегідь міжремонтних ресурсів. 3. За технічним станом ТС. ТО і ремонт за календарними строками призводять до невиправданих матеріальних витрат, тому що не враховують використовувався об'єкт чи ні. ТО і ремонт за виробленням ресурсу незначно ускладнює конструкцію об'єкта (за рахунок вимірювача напрацювання). Організація ТО залишається тут порівняно простою, однак економія коштів використовується не повністю. При ТО за технічним станом періодично контролюється визначальний параметр. Рішення про заміну, ремонт або ТО приймається за результатами контролю, коли визначальний параметр характеризує наближення системи до відмови або до границі допуску. При цьому значно скорочуються витрати на обслуговування, на коштовні елементи і підвищується надійність.
Вибір та обгрунтування показників надійності При проектуванні ТС необхідно вжити низку заходів для забезпечення її надійності. Основні них такі: 1. Вибір і обгрунтування принципів технічного обслуговування ТС; 2. Вибір основного показника надійності ТС; 3. Призначення норм надійності; 4. Розподіл норм надійності системи за елементами. Вибір і обгрунтування принципів техобслуговування (ТО) Розрізняють три основні види технічного обслуговування і ремонту: 1. За календарними строками незалежно від напрацювання об'єкта. 2. За виробленням встановлених заздалегідь міжремонтних ресурсів. 3. За технічним станом ТС. ТО і ремонт за календарними строками призводять до невиправданих матеріальних витрат, тому що не враховують використовувався об'єкт чи ні. ТО і ремонт за виробленням ресурсу незначно ускладнює конструкцію об'єкта (за рахунок вимірювача напрацювання). Організація ТО залишається тут порівняно простою, однак економія коштів використовується не повністю. При ТО за технічним станом періодично контролюється визначальний параметр. Рішення про заміну, ремонт або ТО приймається за результатами контролю, коли визначальний параметр характеризує наближення системи до відмови або до границі допуску. При цьому значно скорочуються витрати на обслуговування, на коштовні елементи і підвищується надійність.
 Вибір та обгрунтування показників надійності Принципи вибору показників надійності При порівнянні об'єктів по надійності виявляється, що показники надійності (ПН) нерівнозначні. В якості прикладу розглянемо дві модифікації TC, що мають різні функції надійності 1 і 2.
Вибір та обгрунтування показників надійності Принципи вибору показників надійності При порівнянні об'єктів по надійності виявляється, що показники надійності (ПН) нерівнозначні. В якості прикладу розглянемо дві модифікації TC, що мають різні функції надійності 1 і 2.
 Вибір та обгрунтування показників надійності З рисунку видно, що протягом технічного ресурсу tp ймовірність безвідмовної роботи P(t) для розглянутих варіантів знаходяться у співвідношенні: P 1(t) > P 2(t) Проте час напрацювання на відмову T 0 першої ТС менше ніж у другої ТС, тобто: T 01 < T 02 Тому, якщо взяти до уваги ймовірність безвідмовної роботи протягом ресурсу, то краще буде перша модифікація. Якщо ж взяти до уваги середнє напрацювання на відмову, то краще буде друга модифікація. Приклад, що демонструє зроблений висновок. Припустимо, що P 1(t) = 2 exp{ – 2λt} - exp{ – 4λt}, P 2(t) = exp{ – λt}. Тоді ймовірності безвідмовної роботи за 500 годин при λ = 10 -4 (годин-1) складатимуть P 1(500) = 0, 99, P 2(500) = 0, 95, тобто P 1(500) > P 2(500). Однак напрацювання на відмову T 02 = λ-1 буде більшим ніж T 02 = 0, 75 λ-1. Отже, якщо за основний показник надійності взяти P(500), то кращим є варіант 1. Якщо ж за основний показник надійності прийняти напрацювання на відмову – кращим вважатиметься варіант 2.
Вибір та обгрунтування показників надійності З рисунку видно, що протягом технічного ресурсу tp ймовірність безвідмовної роботи P(t) для розглянутих варіантів знаходяться у співвідношенні: P 1(t) > P 2(t) Проте час напрацювання на відмову T 0 першої ТС менше ніж у другої ТС, тобто: T 01 < T 02 Тому, якщо взяти до уваги ймовірність безвідмовної роботи протягом ресурсу, то краще буде перша модифікація. Якщо ж взяти до уваги середнє напрацювання на відмову, то краще буде друга модифікація. Приклад, що демонструє зроблений висновок. Припустимо, що P 1(t) = 2 exp{ – 2λt} - exp{ – 4λt}, P 2(t) = exp{ – λt}. Тоді ймовірності безвідмовної роботи за 500 годин при λ = 10 -4 (годин-1) складатимуть P 1(500) = 0, 99, P 2(500) = 0, 95, тобто P 1(500) > P 2(500). Однак напрацювання на відмову T 02 = λ-1 буде більшим ніж T 02 = 0, 75 λ-1. Отже, якщо за основний показник надійності взяти P(500), то кращим є варіант 1. Якщо ж за основний показник надійності прийняти напрацювання на відмову – кращим вважатиметься варіант 2.
 Вибір та обгрунтування показників надійності Методика вибору показників надійності полягає в наступному: 1. Збирають відомості про ТС, до складу якої входить об'єкт, і послідовно аналізують чинники, що впливають на вибір показників надійності. 2. Встановлюють призначення об'єкта. При цьому всі об'єкти поділяються на три групи: а) об'єкти, призначені для роботи в системах, ефективність яких може бути оцінена економічними показниками; б) об'єкти, функціонування яких може бути пов'язано із забезпеченням безпеки; в) об'єкти, для яких не можна вказати призначення систем, в яких вони будуть використані. Для об'єктів типу а) той або інший варіант треба обирати за економічною ефективністю (прибутком) ТС з врахуванням умов її експлуатації і втрат, спричинених відмовою. Для невідновлювальних ТС функція прибутку С(t) дорівнює прибутку від експлуатації системи, яка відмовила в момент часу t: С(t) = - β + γφ(t), φ(0) = 0, де β= β 1 + β 2 – втрати, пов'язані з відмовою системи, β 1 – вартість ТС, β 2 – додаткові втрати відмови системи, γ – прибуток на одиницю часу роботи ТС, φ(t) – функція, що характеризує зростання прибутку.
Вибір та обгрунтування показників надійності Методика вибору показників надійності полягає в наступному: 1. Збирають відомості про ТС, до складу якої входить об'єкт, і послідовно аналізують чинники, що впливають на вибір показників надійності. 2. Встановлюють призначення об'єкта. При цьому всі об'єкти поділяються на три групи: а) об'єкти, призначені для роботи в системах, ефективність яких може бути оцінена економічними показниками; б) об'єкти, функціонування яких може бути пов'язано із забезпеченням безпеки; в) об'єкти, для яких не можна вказати призначення систем, в яких вони будуть використані. Для об'єктів типу а) той або інший варіант треба обирати за економічною ефективністю (прибутком) ТС з врахуванням умов її експлуатації і втрат, спричинених відмовою. Для невідновлювальних ТС функція прибутку С(t) дорівнює прибутку від експлуатації системи, яка відмовила в момент часу t: С(t) = - β + γφ(t), φ(0) = 0, де β= β 1 + β 2 – втрати, пов'язані з відмовою системи, β 1 – вартість ТС, β 2 – додаткові втрати відмови системи, γ – прибуток на одиницю часу роботи ТС, φ(t) – функція, що характеризує зростання прибутку.
 Вибір та обгрунтування показників надійності Найкращою будемо вважати систему, яка забезпечує найбільший середній прибуток С*, що є загальною оцінкою ефективності ТС: С* = М[С(t)] = - β + γ М[φ(t)]. Оскільки величини β та γ не залежать від надійності ТС і визначаються її вартістю і корисністю, єдиною величиною, що визначатиметься надійністю ТС буде М[φ(t)]. Таким чином, для об'єктів типу а) основним показником надійності слід вважати величину М[φ(t)]. При φ(0) = 0 та P(∞) =0: ∞ ∞ М[φ(t)] = ∫ φ(t)f(t)dt = ∫ φ'(t)P(t)dt 0 0 ( *) Наприклад, для ТС, що встановлена на борту автоматичної космічної станції, прибуток прямо пропорційний часу роботи, тобто С(t) = - β+ γt. Отже φ(t) = t, а М[φ(t)] за визначенням (*) з урахуванням φ'(t)=1: ∞ М[φ(t)] = ∫ P(t)dt = Т 0 0 Основним показником надійності в даному випадку є середній час безвідмовної роботи, що співпадає з інтуїтивним очікуванням.
Вибір та обгрунтування показників надійності Найкращою будемо вважати систему, яка забезпечує найбільший середній прибуток С*, що є загальною оцінкою ефективності ТС: С* = М[С(t)] = - β + γ М[φ(t)]. Оскільки величини β та γ не залежать від надійності ТС і визначаються її вартістю і корисністю, єдиною величиною, що визначатиметься надійністю ТС буде М[φ(t)]. Таким чином, для об'єктів типу а) основним показником надійності слід вважати величину М[φ(t)]. При φ(0) = 0 та P(∞) =0: ∞ ∞ М[φ(t)] = ∫ φ(t)f(t)dt = ∫ φ'(t)P(t)dt 0 0 ( *) Наприклад, для ТС, що встановлена на борту автоматичної космічної станції, прибуток прямо пропорційний часу роботи, тобто С(t) = - β+ γt. Отже φ(t) = t, а М[φ(t)] за визначенням (*) з урахуванням φ'(t)=1: ∞ М[φ(t)] = ∫ P(t)dt = Т 0 0 Основним показником надійності в даному випадку є середній час безвідмовної роботи, що співпадає з інтуїтивним очікуванням.
 Вибір та обгрунтування показників надійності Для іншої ТС, встановленої на борту ракети одноразового використання, прибуток дорівнює: - β, при t < tn , С(t) = γ – β, при t ≥ tn , де tn - час польоту ракети. Відповідно до цього: 0, при t < tn , φ(t) = 1, при t ≥ tn , φ'(t) = δ(t- tn), де δ(t) – дельта-функція. Отже ∞ ∞ 0 0 М[φ(t)] = ∫ φ'(t) P(t)dt = ∫ P(t) δ(t- tn)dt = P(tn). Таким чином основним показником надійності в даному випадку є ймовірність безвідмовної роботи протягом часу польоту tn.
Вибір та обгрунтування показників надійності Для іншої ТС, встановленої на борту ракети одноразового використання, прибуток дорівнює: - β, при t < tn , С(t) = γ – β, при t ≥ tn , де tn - час польоту ракети. Відповідно до цього: 0, при t < tn , φ(t) = 1, при t ≥ tn , φ'(t) = δ(t- tn), де δ(t) – дельта-функція. Отже ∞ ∞ 0 0 М[φ(t)] = ∫ φ'(t) P(t)dt = ∫ P(t) δ(t- tn)dt = P(tn). Таким чином основним показником надійності в даному випадку є ймовірність безвідмовної роботи протягом часу польоту tn.
 Вибір та обгрунтування показників надійності Для оцінки ефективності роботи конкретної відновлювальної ТС доцільно застосувати середнє значення прибутку Ср за одиницю часу на інтервалі (0, Тр), де Тр – технічний ресурс системи, : Тр Ср = (1/Тр) ∫ с(t) dt 0 Тут с(t) – прибуток від використання системи за одиницю часу. Цільову функцію С*р визначимо як математичне сподівання Ср: Тр С*р = М[Ср] = (1/Тр) ∫ М[с(t)]dt 0 З метою більш адекватного відображення особливостей функціонування ТС введемо функцію x(t): 1, коли ТС - працює, x(t) = 0, коли ТС - відновлюється, Вважатимемо, що: - під час роботи за одиницю часу ТС приносить прибуток γ; - відмова ТС призводить до втрат Сі першого роду, які обумовленні вартістю елементів, що відмовили; - втрати εt – втрати другого роду, що обумовленні простоєм ТСі пропорційні тривалості відновлення.
Вибір та обгрунтування показників надійності Для оцінки ефективності роботи конкретної відновлювальної ТС доцільно застосувати середнє значення прибутку Ср за одиницю часу на інтервалі (0, Тр), де Тр – технічний ресурс системи, : Тр Ср = (1/Тр) ∫ с(t) dt 0 Тут с(t) – прибуток від використання системи за одиницю часу. Цільову функцію С*р визначимо як математичне сподівання Ср: Тр С*р = М[Ср] = (1/Тр) ∫ М[с(t)]dt 0 З метою більш адекватного відображення особливостей функціонування ТС введемо функцію x(t): 1, коли ТС - працює, x(t) = 0, коли ТС - відновлюється, Вважатимемо, що: - під час роботи за одиницю часу ТС приносить прибуток γ; - відмова ТС призводить до втрат Сі першого роду, які обумовленні вартістю елементів, що відмовили; - втрати εt – втрати другого роду, що обумовленні простоєм ТСі пропорційні тривалості відновлення.
 Вибір та обгрунтування показників надійності З урахуванням останнього прибуток ТС за одиницю часу: n с(t) = (γ+ε)x(t) – ε - Σ Сі δ(t- tі), i=1 Сі – втрати першого роду, спричинені і-ю відмовою (і=1, 2, . . . , n); n – число відмов протягом ресурсу Тр; tі – моменти появи відмов. Розглянемо як впливатиме на прибуток ТС співвідношення втрат першого Сі та другого родів ε. При Сі << ε втрати відмови ТС зумовлені тільки її простоєм. На практиці це відповідаю випадку, коли ТС скомплектована малоцінними елементами, відмова кожного з яких спричиняє відмову системи в цілому. Отже прибуток ТС за одиницю часу: с(t) = (γ+ε)x(t) – ε, з урахуванням чого цільова функція приймає вид: Тр С*р = [(γ+ε)/Тр] ∫ М[x(t)]dt – ε 0 В цьому виразі від надійності ТС залежить лише множник Тр (1/Тр) ∫ М[x(t)]dt = Н, 0 який і слід вважати основним показником надійності.
Вибір та обгрунтування показників надійності З урахуванням останнього прибуток ТС за одиницю часу: n с(t) = (γ+ε)x(t) – ε - Σ Сі δ(t- tі), i=1 Сі – втрати першого роду, спричинені і-ю відмовою (і=1, 2, . . . , n); n – число відмов протягом ресурсу Тр; tі – моменти появи відмов. Розглянемо як впливатиме на прибуток ТС співвідношення втрат першого Сі та другого родів ε. При Сі << ε втрати відмови ТС зумовлені тільки її простоєм. На практиці це відповідаю випадку, коли ТС скомплектована малоцінними елементами, відмова кожного з яких спричиняє відмову системи в цілому. Отже прибуток ТС за одиницю часу: с(t) = (γ+ε)x(t) – ε, з урахуванням чого цільова функція приймає вид: Тр С*р = [(γ+ε)/Тр] ∫ М[x(t)]dt – ε 0 В цьому виразі від надійності ТС залежить лише множник Тр (1/Тр) ∫ М[x(t)]dt = Н, 0 який і слід вважати основним показником надійності.
 приймає тільки два значення, то для") Вибір та обгрунтування показників надійності Оскільки функція x(t) приймає тільки два значення, то для кожного t легко обчислити її математичне сподівання: М[x(t)] = 1*G(t) + 0*[1 - G(t)] = G(t), де G(t) - функція готовності ТС Отже Тр Н = (1/Тр) ∫ G(t)dt = Кг, 0 Тобто основним показником надійності в даному випадку є коефіцієнт готовності. При Сі >> ε втрати відмови ТС визначаються вартістю елементів, що відмовили. На практиці це відповідає випадку, коли ТС укомплектована елементами значної вартості, заміна яких при відмові здійснюється швидко при незначних втратах від простою. Отже прибуток ТС за одиницю часу: n с(t) = γ - Σ Сі δ(t- tі), i=1
Вибір та обгрунтування показників надійності Оскільки функція x(t) приймає тільки два значення, то для кожного t легко обчислити її математичне сподівання: М[x(t)] = 1*G(t) + 0*[1 - G(t)] = G(t), де G(t) - функція готовності ТС Отже Тр Н = (1/Тр) ∫ G(t)dt = Кг, 0 Тобто основним показником надійності в даному випадку є коефіцієнт готовності. При Сі >> ε втрати відмови ТС визначаються вартістю елементів, що відмовили. На практиці це відповідає випадку, коли ТС укомплектована елементами значної вартості, заміна яких при відмові здійснюється швидко при незначних втратах від простою. Отже прибуток ТС за одиницю часу: n с(t) = γ - Σ Сі δ(t- tі), i=1
 Вибір та обгрунтування показників надійності З урахуванням останнього цільова функція прийме вид: n С*р = γ - (1/Тр) М[Σ Сі] = γ – C 0 N / Тр , i=1 де N – середнє число відмов за час Тр , C 0 - середні витрати на усунення одної відмови. В останьому виразі від надійності ТС залежить тільки відношення N / Тр = Н, яке і є основним показником надійності за умови Сі >> ε , причому величина середнього числа відмов за час Тр може бути визначена, зокрема, за щільністю f(t) розподілу часу безвідмовної роботи ТС. Процес функціонування відновлюваної ТС за умови, що час відновлення tв можна вважати tв = 0, носить назву процесу поновлення. Найбільш повно цей процес характеризують: - функція поновлення N(t), яка дорівнює середньому числу поновлень (відмов), що відбулися до моменту t; - функція інтенсивності поновлень Ψ(t).
Вибір та обгрунтування показників надійності З урахуванням останнього цільова функція прийме вид: n С*р = γ - (1/Тр) М[Σ Сі] = γ – C 0 N / Тр , i=1 де N – середнє число відмов за час Тр , C 0 - середні витрати на усунення одної відмови. В останьому виразі від надійності ТС залежить тільки відношення N / Тр = Н, яке і є основним показником надійності за умови Сі >> ε , причому величина середнього числа відмов за час Тр може бути визначена, зокрема, за щільністю f(t) розподілу часу безвідмовної роботи ТС. Процес функціонування відновлюваної ТС за умови, що час відновлення tв можна вважати tв = 0, носить назву процесу поновлення. Найбільш повно цей процес характеризують: - функція поновлення N(t), яка дорівнює середньому числу поновлень (відмов), що відбулися до моменту t; - функція інтенсивності поновлень Ψ(t).
 та Ψ(t) визначається як:") Вибір та обгрунтування показників надійності Вочевидь, що взаємозв'язок функцій N(t) та Ψ(t) визначається як: t N(t) = ∫ Ψ(t) dt 0 Якщо вважати , що поновлення повністю відновлює характеристики якості ТС, то процес поновлення можна розглядати як заміну системи, що відмовила, новою. В цьому випадку можна встановити зв'язок між функціями інтенсивності поновлень Ψ(t) та частотою відмов f(t) (щільністю розподілу ймовірності часу безвідмовної роботи ТС), який має вигляд: t Ψ(t) = f(t) +∫Ψ(τ) f(t - τ)dτ 0 і носить назву рівняння поновлення. Розв'язок цього рівняння за допомогою перетворення Лапласа: Ψ·(s) = f·(s) / [1 -f·(s)], · · де Ψ (s), f (s) – відображення за Лапласом функцій Ψ(t) та f(t). При f(t)= λ exp{– λt} маємо Ψ(t) = λ, Тобто для експоненціального закону надійності ТС її інтенсивність відмов λ дорівнює інтенсивності поновлень.
Вибір та обгрунтування показників надійності Вочевидь, що взаємозв'язок функцій N(t) та Ψ(t) визначається як: t N(t) = ∫ Ψ(t) dt 0 Якщо вважати , що поновлення повністю відновлює характеристики якості ТС, то процес поновлення можна розглядати як заміну системи, що відмовила, новою. В цьому випадку можна встановити зв'язок між функціями інтенсивності поновлень Ψ(t) та частотою відмов f(t) (щільністю розподілу ймовірності часу безвідмовної роботи ТС), який має вигляд: t Ψ(t) = f(t) +∫Ψ(τ) f(t - τ)dτ 0 і носить назву рівняння поновлення. Розв'язок цього рівняння за допомогою перетворення Лапласа: Ψ·(s) = f·(s) / [1 -f·(s)], · · де Ψ (s), f (s) – відображення за Лапласом функцій Ψ(t) та f(t). При f(t)= λ exp{– λt} маємо Ψ(t) = λ, Тобто для експоненціального закону надійності ТС її інтенсивність відмов λ дорівнює інтенсивності поновлень.
 Вибір та обгрунтування показників надійності В загальному випадку це не так, але при будь-якій безперервній щільності розподілу f(t), що прямує до нуля при t → ∞, має місце: t→∞ lim Ψ(t) = 1/Т 0 При λ= const середнє число поновлень (відмов), що відбулися до моменту t, дорівнюватиме N(t) = λ t. З урахуванням N / Тр = Н, вираз для основного показника надійності приймає вид: Н = (λ Тр )/ Тр = λ Це означає, що для розглянутого типу відновлюваних систем основним показником надійності є інтенсивність відмов. Таким чином, знаючи призначення і умови експлуатації ТС для кожного конкретного випадку можна побудувати функцію прибутку, на базі якої в подальшому визначити основний показник надійності даної системи.
Вибір та обгрунтування показників надійності В загальному випадку це не так, але при будь-якій безперервній щільності розподілу f(t), що прямує до нуля при t → ∞, має місце: t→∞ lim Ψ(t) = 1/Т 0 При λ= const середнє число поновлень (відмов), що відбулися до моменту t, дорівнюватиме N(t) = λ t. З урахуванням N / Тр = Н, вираз для основного показника надійності приймає вид: Н = (λ Тр )/ Тр = λ Це означає, що для розглянутого типу відновлюваних систем основним показником надійності є інтенсивність відмов. Таким чином, знаючи призначення і умови експлуатації ТС для кожного конкретного випадку можна побудувати функцію прибутку, на базі якої в подальшому визначити основний показник надійності даної системи.
 Вибір та обгрунтування показників надійності Функціонування системи в умовах, коли tв ≠ 0 може бути зведений до процесу поновлення шляхом введення до розгляду випадкової величини (Т+ tв) , де Т – час безвідмовної роботи, а tв – час відновлення системи. Відомо (ТЙ), що розподіл суми двох незалежних випадкових величин має вигляд: t φ(t) =∫ f(t) r(t - τ)dτ 0 де r(t) - функція щільності розподілу часу відновлення. Рівняння поновлення в цьому випадку приймає вигляд: t Ψ(t) = φ(t) + ∫ Ψ(τ) φ(t - τ)dτ 0 Тоді, аналогічно випадку для tв = 0, можна отримати: де t→∞ lim Ψ(t) = 1/ТС , ТС = Т 0 + Т в , Т 0 – середній час напрацювання на відмову, Тв – середня тривалість відновлення.
Вибір та обгрунтування показників надійності Функціонування системи в умовах, коли tв ≠ 0 може бути зведений до процесу поновлення шляхом введення до розгляду випадкової величини (Т+ tв) , де Т – час безвідмовної роботи, а tв – час відновлення системи. Відомо (ТЙ), що розподіл суми двох незалежних випадкових величин має вигляд: t φ(t) =∫ f(t) r(t - τ)dτ 0 де r(t) - функція щільності розподілу часу відновлення. Рівняння поновлення в цьому випадку приймає вигляд: t Ψ(t) = φ(t) + ∫ Ψ(τ) φ(t - τ)dτ 0 Тоді, аналогічно випадку для tв = 0, можна отримати: де t→∞ lim Ψ(t) = 1/ТС , ТС = Т 0 + Т в , Т 0 – середній час напрацювання на відмову, Тв – середня тривалість відновлення.
 Вибір та обгрунтування показників надійності При призначенні показників надійності систем і об'єктів, функціонування яких може бути пов'язано із забезпеченням безпеки (група б)) необхідно визначити основні фактори, що впливають на безпеку функціонування ТС. Відповідні математичні моделі повинні враховувати випадкові процеси, що відбуваються в системі після виникнення відмов. Для третьої групи (група в)) об'єктів, для яких не можна вказати тип системи, доцільно призначати одну будь-яку повну характеристику надійності: 1. Для ТС, що не ремонтуються, - функцію надійності Р(t) або щільність розподілу напрацювання на відмову f(t), або інтенсивність відмов λ(t); 2. Для ТС, що ремонтуються, але не відновлюються в процесі використання – або ймовірність безвідмовної роботи Р(t 1, t 2), або параметр потоку відмов Ω(t) (комплексний показник надійності); 3. Для ТС, що ремонтуються і поновлюються в процесі використання показники надійності обраховуються у календарному часі.
Вибір та обгрунтування показників надійності При призначенні показників надійності систем і об'єктів, функціонування яких може бути пов'язано із забезпеченням безпеки (група б)) необхідно визначити основні фактори, що впливають на безпеку функціонування ТС. Відповідні математичні моделі повинні враховувати випадкові процеси, що відбуваються в системі після виникнення відмов. Для третьої групи (група в)) об'єктів, для яких не можна вказати тип системи, доцільно призначати одну будь-яку повну характеристику надійності: 1. Для ТС, що не ремонтуються, - функцію надійності Р(t) або щільність розподілу напрацювання на відмову f(t), або інтенсивність відмов λ(t); 2. Для ТС, що ремонтуються, але не відновлюються в процесі використання – або ймовірність безвідмовної роботи Р(t 1, t 2), або параметр потоку відмов Ω(t) (комплексний показник надійності); 3. Для ТС, що ремонтуються і поновлюються в процесі використання показники надійності обраховуються у календарному часі.
 Вибір та обгрунтування показників надійності Для ТС, перерви в роботі яких є допустимими, у якості показника надійності використовується функція готовності G(t). Для ТС, перерви в роботі яких є недопустимими, у якості показника надійності використовується ймовірність безвідмовної роботи Р(t 1, t 2). На практиці, якщо відомо або є передбачуваним якійсь тип закону розподілу часу безвідмовної роботи (напрацювання на відмову), доцільно визначати: 1. За умови експоненціального розподілу – один з таких показників: а) інтенсивність відмов λ(t); б) середній наробіток до відмови Т 0; в) ймовірність безвідмовної роботи на заданому інтервалі часу Δ tз. 2. При двопараметричному законі розподілу наробітку до відмови або між відмовами застосовуються два показника (наприклад, для нормального розподілу): а) середній наробіток до відмови Т 0; б) дисперсія часу безвідмовної роботи системи σ2; в) ймовірності безвідмовної роботи Р(t 1), Р(t 2) при двох значеннях інтервалу часу роботи ТС – (0, t 1) , (0, t 2).
Вибір та обгрунтування показників надійності Для ТС, перерви в роботі яких є допустимими, у якості показника надійності використовується функція готовності G(t). Для ТС, перерви в роботі яких є недопустимими, у якості показника надійності використовується ймовірність безвідмовної роботи Р(t 1, t 2). На практиці, якщо відомо або є передбачуваним якійсь тип закону розподілу часу безвідмовної роботи (напрацювання на відмову), доцільно визначати: 1. За умови експоненціального розподілу – один з таких показників: а) інтенсивність відмов λ(t); б) середній наробіток до відмови Т 0; в) ймовірність безвідмовної роботи на заданому інтервалі часу Δ tз. 2. При двопараметричному законі розподілу наробітку до відмови або між відмовами застосовуються два показника (наприклад, для нормального розподілу): а) середній наробіток до відмови Т 0; б) дисперсія часу безвідмовної роботи системи σ2; в) ймовірності безвідмовної роботи Р(t 1), Р(t 2) при двох значеннях інтервалу часу роботи ТС – (0, t 1) , (0, t 2).
 Вибір та обгрунтування показників надійності 3. Якщо тип закону розподілу – невідомий, рекомендується задавати значення: а) ймовірності безвідмовної роботи Р(t) або інтенсивності відмов λ(t); б) або параметру потоку відмов Ω(t) (комплексний показник надійності); в) або інші показники надійності не менш ніж при трьох значеннях заданого наробітку (часу).
Вибір та обгрунтування показників надійності 3. Якщо тип закону розподілу – невідомий, рекомендується задавати значення: а) ймовірності безвідмовної роботи Р(t) або інтенсивності відмов λ(t); б) або параметру потоку відмов Ω(t) (комплексний показник надійності); в) або інші показники надійності не менш ніж при трьох значеннях заданого наробітку (часу).
 Призначення норм надійності Після вибору основних показників надійності при проектуванні ТС необхідно задати певні значення цих показників з урахуванням економічних та технологічних можливостей виробництва. Спочатку визначаються норми надійності, що відповідають технології виробництва (функціонування). Потім вони уточнюються і формуються заходи щодо підвищення надійності, найбільш вигідні економічно. При складанні технічного завдання обґрунтувати кількісні норми (вимоги) щодо надійності та іншім експлуатаційним властивостям ТС зазвичай вдається лише після розгляду відповідних характеристик вже існуючих аналогів. Тобто обов'язково необхідно мати прототип ТС, що проектується, і враховувати тенденції зміни його характеристик. Значення норм надійності прототипу коригуються з урахуванням: 1. Технічних характеристик проектованого об'єкта; 2. Технічного прогресу за час його проектування і виготовлення; 3. Змін умов експлуатації; 4. Обмежуючих факторів (вартість, вага, габарити, безпека і т. і. ); 5. Значущості наслідків відмов; 6. Кваліфікації операторів і деяких інших специфічних для кожного виробу факторів.
Призначення норм надійності Після вибору основних показників надійності при проектуванні ТС необхідно задати певні значення цих показників з урахуванням економічних та технологічних можливостей виробництва. Спочатку визначаються норми надійності, що відповідають технології виробництва (функціонування). Потім вони уточнюються і формуються заходи щодо підвищення надійності, найбільш вигідні економічно. При складанні технічного завдання обґрунтувати кількісні норми (вимоги) щодо надійності та іншім експлуатаційним властивостям ТС зазвичай вдається лише після розгляду відповідних характеристик вже існуючих аналогів. Тобто обов'язково необхідно мати прототип ТС, що проектується, і враховувати тенденції зміни його характеристик. Значення норм надійності прототипу коригуються з урахуванням: 1. Технічних характеристик проектованого об'єкта; 2. Технічного прогресу за час його проектування і виготовлення; 3. Змін умов експлуатації; 4. Обмежуючих факторів (вартість, вага, габарити, безпека і т. і. ); 5. Значущості наслідків відмов; 6. Кваліфікації операторів і деяких інших специфічних для кожного виробу факторів.
 Загальні методи розрахунку надійності проектованих ТС Постановка завдання За наявних відомостей про надійність елементів ТС і зв'язках між її елементами (або схемою ТС) необхідно визначити значення показників надійності системи. Визначення надійності всього об'єкта або системи переслідує такі цілі: 1. Визначити, чи досяжна задана надійність на сучасному (актуальному) рівні розвитку техніки. 2. Допомогти розподілити значення показників надійності по елементам, блокам і вузлам. 3. Допомогти зробити вибір між різними конструктивними рішеннями. 4. З'ясувати (обґрунтувати) доцільність введення резервування. Шляхи визначення надійності ТС: 1) Складанням математичної (логічної) моделі функціонування; 2) Безпосередньо за функціональною схемою системи. За першим шляхом, що є загальноприйнятим, необхідно визначити, які стани ТС треба враховувати, ознаки цих станів і т. д. , тобто необхідно описати функціонування реальної ТС формальною мовою подій і станів.
Загальні методи розрахунку надійності проектованих ТС Постановка завдання За наявних відомостей про надійність елементів ТС і зв'язках між її елементами (або схемою ТС) необхідно визначити значення показників надійності системи. Визначення надійності всього об'єкта або системи переслідує такі цілі: 1. Визначити, чи досяжна задана надійність на сучасному (актуальному) рівні розвитку техніки. 2. Допомогти розподілити значення показників надійності по елементам, блокам і вузлам. 3. Допомогти зробити вибір між різними конструктивними рішеннями. 4. З'ясувати (обґрунтувати) доцільність введення резервування. Шляхи визначення надійності ТС: 1) Складанням математичної (логічної) моделі функціонування; 2) Безпосередньо за функціональною схемою системи. За першим шляхом, що є загальноприйнятим, необхідно визначити, які стани ТС треба враховувати, ознаки цих станів і т. д. , тобто необхідно описати функціонування реальної ТС формальною мовою подій і станів.
 Загальні методи розрахунку надійності проектованих ТС Найбільшого поширення набули логічні моделі безвідмовної роботи системи. При цьому вважають, що елементи можуть знаходитися в двох несумісних станах: працездатному і непрацездатному. Функціональні зв'язки між елементами замінюються логічними, що характеризують стан ТС. Умови працездатності системи при відмовах елементів формуються за допомогою логічних співвідношень. Для опису надійності найбільше поширення одержали такі методи: - метод інтегральних рівнянь; - метод диференціальних рівнянь; - метод оцінки надійності по графу можливих станів системи. Метод інтегральних рівнянь Цей метод можна застосовувати при розрахунку надійності будь-яких систем при будь-яких розподілах часу БР і часу відновлення. Визначення ПН тут відбувається шляхом складання і рішення інтегральних або інтегро-диференціальних рівнянь. При складанні інтегральних рівнянь зазвичай виділяють один або кілька нескінченно малих інтервалів часу. Для цих інтервалів часу розглядають складні події, які з'являються при спільній дії декількох чинників.
Загальні методи розрахунку надійності проектованих ТС Найбільшого поширення набули логічні моделі безвідмовної роботи системи. При цьому вважають, що елементи можуть знаходитися в двох несумісних станах: працездатному і непрацездатному. Функціональні зв'язки між елементами замінюються логічними, що характеризують стан ТС. Умови працездатності системи при відмовах елементів формуються за допомогою логічних співвідношень. Для опису надійності найбільше поширення одержали такі методи: - метод інтегральних рівнянь; - метод диференціальних рівнянь; - метод оцінки надійності по графу можливих станів системи. Метод інтегральних рівнянь Цей метод можна застосовувати при розрахунку надійності будь-яких систем при будь-яких розподілах часу БР і часу відновлення. Визначення ПН тут відбувається шляхом складання і рішення інтегральних або інтегро-диференціальних рівнянь. При складанні інтегральних рівнянь зазвичай виділяють один або кілька нескінченно малих інтервалів часу. Для цих інтервалів часу розглядають складні події, які з'являються при спільній дії декількох чинників.
 Загальні методи розрахунку надійності проектованих ТС Ці рівняння порівняно просто складати, але важко вирішувати частіш за все лише чисельними методами за допомогою компютерних засобів. У зв'язку з цим метод інтегральних рівнянь в даний час не набув широкого поширення. Як приклад застосування цього методу розглянемо розрахунок надійності невідновлювальної ТС з холодним резервом. При цьому припустимо: - індикатор відмови і перемикач абсолютно надійні; - резервні елементи не можуть відмовити до включення їх в роботу; - ремонт резервної системи в процесі її роботи неможливий. Така резервована система буде безвідмовно працювати протягом часу (0, t) при двох можливих подіях: - основний елемент не відмовив; - основний елемент відмовив у момент τ < t , а резервний елемент відпрацював безвідмовно протягом інтервалу (τ, t).
Загальні методи розрахунку надійності проектованих ТС Ці рівняння порівняно просто складати, але важко вирішувати частіш за все лише чисельними методами за допомогою компютерних засобів. У зв'язку з цим метод інтегральних рівнянь в даний час не набув широкого поширення. Як приклад застосування цього методу розглянемо розрахунок надійності невідновлювальної ТС з холодним резервом. При цьому припустимо: - індикатор відмови і перемикач абсолютно надійні; - резервні елементи не можуть відмовити до включення їх в роботу; - ремонт резервної системи в процесі її роботи неможливий. Така резервована система буде безвідмовно працювати протягом часу (0, t) при двох можливих подіях: - основний елемент не відмовив; - основний елемент відмовив у момент τ < t , а резервний елемент відпрацював безвідмовно протягом інтервалу (τ, t).
. Ймовірність") Загальні методи розрахунку надійності проектованих ТС Позначимо ймовірність першої події – Р 1(t). Ймовірність виникнення відмови основного елемента протягом малого інтервалу часу (τ, τ + dτ) дорівнює: f 1(τ) dτ = - P'(τ) dτ, де f 1(τ) – щільність ймовірності моменту відмови основного елемента. Ймовірність безвідмовної роботи системи за умови, що в момент τ виникла відмова основного елементу та включився резервний дорівнює Р 2(t - τ). Тоді ймовірність реалізації другої події на інтервалі (τ, τ + dτ): Р 2(t - τ) f 1(τ) dτ Інтеграл від цього виразу від 0 до t є ймовірністю здійснення другої події: t ∫ Р 2(t - τ) f 1(τ) dτ 0 Ймовірність безвідмовної роботи дубльованої системи з холодним резервом дорівнює сумі ймовірностей здійснення першої та другої подій:
Загальні методи розрахунку надійності проектованих ТС Позначимо ймовірність першої події – Р 1(t). Ймовірність виникнення відмови основного елемента протягом малого інтервалу часу (τ, τ + dτ) дорівнює: f 1(τ) dτ = - P'(τ) dτ, де f 1(τ) – щільність ймовірності моменту відмови основного елемента. Ймовірність безвідмовної роботи системи за умови, що в момент τ виникла відмова основного елементу та включився резервний дорівнює Р 2(t - τ). Тоді ймовірність реалізації другої події на інтервалі (τ, τ + dτ): Р 2(t - τ) f 1(τ) dτ Інтеграл від цього виразу від 0 до t є ймовірністю здійснення другої події: t ∫ Р 2(t - τ) f 1(τ) dτ 0 Ймовірність безвідмовної роботи дубльованої системи з холодним резервом дорівнює сумі ймовірностей здійснення першої та другої подій:
 = Р 1(t) + ∫ Р") Загальні методи розрахунку надійності проектованих ТС t Р(t) = Р 1(t) + ∫ Р 2(t - τ) f 1(τ) dτ 0 Якщо система має один основний і (К-1) резервний елемент, то, взявши за основу цей вираз, можна отримати рекурентну формулу: t РКС(t) = РК-1(t) + ∫ РК(t - τ) f. К-1(τ) dτ, 0 де індекс (К-1) - означає, що відповідні характеристики відносяться до резервної системи, при відмові якої включається в роботу останній К-й резервний елемент. При експоненціальному розподілі наробітку до відмови основного і резервного елементів, що мають інтенсивності відмов λ 1 та λ 2: Р(t) = exp {- λ 1 t} + λ 1/(λ 2 - λ 1) [exp {- λ 1 t} - exp {- λ 2 t}]; Щільність наробітку дубльованої системи на відмову: f(t) =( λ 1 λ 2 ) /(λ 1 - λ 2) [exp {- λ 1 t} - exp {- λ 2 t}].
Загальні методи розрахунку надійності проектованих ТС t Р(t) = Р 1(t) + ∫ Р 2(t - τ) f 1(τ) dτ 0 Якщо система має один основний і (К-1) резервний елемент, то, взявши за основу цей вираз, можна отримати рекурентну формулу: t РКС(t) = РК-1(t) + ∫ РК(t - τ) f. К-1(τ) dτ, 0 де індекс (К-1) - означає, що відповідні характеристики відносяться до резервної системи, при відмові якої включається в роботу останній К-й резервний елемент. При експоненціальному розподілі наробітку до відмови основного і резервного елементів, що мають інтенсивності відмов λ 1 та λ 2: Р(t) = exp {- λ 1 t} + λ 1/(λ 2 - λ 1) [exp {- λ 1 t} - exp {- λ 2 t}]; Щільність наробітку дубльованої системи на відмову: f(t) =( λ 1 λ 2 ) /(λ 1 - λ 2) [exp {- λ 1 t} - exp {- λ 2 t}].
 Загальні методи розрахунку надійності проектованих ТС Метод диференціальних рівнянь Цей метод заснований на припущенні, що час між відмовами і час відновлення системи мають експоненціальний розподіл. При цьому інтенсивність відмов λ = 1/Т 0 та інтенсивність відновлення μ= 1/ТВ , де Т 0, ТВ - відповідно середній час до відмови і відновлення. Цей метод може застосовуватися для розрахунку надійності, як відновлюваних, так і невідновлювальних систем. Для застосування цього методу необхідно мати математичну модель ТС у вигляді множини станів системи, у яких вона може перебувати при відмовах і відновленнях. Для визначення ПН складають і вирішують систему диференціальних рівнянь для ймовірностей станів (рівнянь Колмогорова). Щоб при цьому гранично спростити розрахунок зазвичай припускають, що: - об'єкти, що відмовили, починають негайно відновлюватися; - відсутні обмеження на число відновлень; - надійність засобів контролю ідеальна.
Загальні методи розрахунку надійності проектованих ТС Метод диференціальних рівнянь Цей метод заснований на припущенні, що час між відмовами і час відновлення системи мають експоненціальний розподіл. При цьому інтенсивність відмов λ = 1/Т 0 та інтенсивність відновлення μ= 1/ТВ , де Т 0, ТВ - відповідно середній час до відмови і відновлення. Цей метод може застосовуватися для розрахунку надійності, як відновлюваних, так і невідновлювальних систем. Для застосування цього методу необхідно мати математичну модель ТС у вигляді множини станів системи, у яких вона може перебувати при відмовах і відновленнях. Для визначення ПН складають і вирішують систему диференціальних рівнянь для ймовірностей станів (рівнянь Колмогорова). Щоб при цьому гранично спростити розрахунок зазвичай припускають, що: - об'єкти, що відмовили, починають негайно відновлюватися; - відсутні обмеження на число відновлень; - надійність засобів контролю ідеальна.
 Загальні методи розрахунку надійності проектованих ТС Математична модель ТС зображується у вигляді графа станів. На цьому графі кружечками зображуються можливі стани системи при відмовах її елементів. Стрілками зображують можливі напрямки переходів системи з одного стану в інший. Біля стрілок вказуються інтенсивність переходів (наприклад, λ або μ). Якщо розглядається невідновлювальних система, то між станами є тільки одна стрілка. Для визначення ймовірностей знаходження системи в j-му стані в момент часу t по графу станів ТС складають систему звичайних диференціальних рівнянь.
Загальні методи розрахунку надійності проектованих ТС Математична модель ТС зображується у вигляді графа станів. На цьому графі кружечками зображуються можливі стани системи при відмовах її елементів. Стрілками зображують можливі напрямки переходів системи з одного стану в інший. Біля стрілок вказуються інтенсивність переходів (наприклад, λ або μ). Якщо розглядається невідновлювальних система, то між станами є тільки одна стрілка. Для визначення ймовірностей знаходження системи в j-му стані в момент часу t по графу станів ТС складають систему звичайних диференціальних рівнянь.
 Загальні методи розрахунку надійності проектованих ТС Для цього в ліву частину кожного рівняння ставлять похідну за часом від ймовірності перебування системи в j-му стані в момент часу t. Кількість членів у правій частині дорівнює числу стрілок, що з'єднують стан, що розглядається, з іншим. При цьому кожен член дорівнює ймовірності переходу з одного стану в інший, а саме добутку інтенсивності переходу (наприклад, λij ) на ймовірність того i-го стану, з якого стрілка виходить. Добуток береться із знаком “+” , якщо стрілка входить у стан, що розглядається. Отримана система диференціальних рівнянь доповнюється нормуючою умовою: n Σ Pj (t) = 1, j=0 де Pj (t) - ймовірність перебування системи в j-му стані, (n+1) - число можливих станів. Далі вся множина станів розбивається на дві підмножини: - підмножина станів, в яких система непрацездатна, - підмножина станів, в яких система працездатна.
Загальні методи розрахунку надійності проектованих ТС Для цього в ліву частину кожного рівняння ставлять похідну за часом від ймовірності перебування системи в j-му стані в момент часу t. Кількість членів у правій частині дорівнює числу стрілок, що з'єднують стан, що розглядається, з іншим. При цьому кожен член дорівнює ймовірності переходу з одного стану в інший, а саме добутку інтенсивності переходу (наприклад, λij ) на ймовірність того i-го стану, з якого стрілка виходить. Добуток береться із знаком “+” , якщо стрілка входить у стан, що розглядається. Отримана система диференціальних рівнянь доповнюється нормуючою умовою: n Σ Pj (t) = 1, j=0 де Pj (t) - ймовірність перебування системи в j-му стані, (n+1) - число можливих станів. Далі вся множина станів розбивається на дві підмножини: - підмножина станів, в яких система непрацездатна, - підмножина станів, в яких система працездатна.
 Загальні методи розрахунку надійності проектованих ТС Тоді функцію готовності системи можна визначити як: n G(t)= Σ Pj (t), j=0 Рj(t) – ймовірність перебування системи в j-му працездатному стані. Якщо необхідно визначити коефіцієнт готовності (або простою) розглядають сталий режим експлуатації при t → ∞. У цьому випадку всі похідні Р'j(t)=0 і система диференціальних рівнянь переходить у систему алгебраїчних рівнянь. Приклад. Обчислимо коефіцієнт готовності Кг. С системи, якщо коефіцієнт готовності кожного з n її елементів відповідно рівні: Кг 1, Кг 2, …, Кгj, . . . , Кгn. Вважаємо, що ТС відмовляє, якщо відмовив хоча б один з її елементів. Необхідно розглянути всі стани системи. Для цього складається граф станів (вищенаведений рис. ). Цей граф позначає такі стани системи: 0 - всі елементи працездатні; 1 - перший елемент непрацездатний, інші працездатні; 2 - другий елемент непрацездатний, інші працездатні і т. д. Ймовірність появи одночасно двох непрацездатних елементів вважаємо настільки малою, що її можна не брати до уваги.
Загальні методи розрахунку надійності проектованих ТС Тоді функцію готовності системи можна визначити як: n G(t)= Σ Pj (t), j=0 Рj(t) – ймовірність перебування системи в j-му працездатному стані. Якщо необхідно визначити коефіцієнт готовності (або простою) розглядають сталий режим експлуатації при t → ∞. У цьому випадку всі похідні Р'j(t)=0 і система диференціальних рівнянь переходить у систему алгебраїчних рівнянь. Приклад. Обчислимо коефіцієнт готовності Кг. С системи, якщо коефіцієнт готовності кожного з n її елементів відповідно рівні: Кг 1, Кг 2, …, Кгj, . . . , Кгn. Вважаємо, що ТС відмовляє, якщо відмовив хоча б один з її елементів. Необхідно розглянути всі стани системи. Для цього складається граф станів (вищенаведений рис. ). Цей граф позначає такі стани системи: 0 - всі елементи працездатні; 1 - перший елемент непрацездатний, інші працездатні; 2 - другий елемент непрацездатний, інші працездатні і т. д. Ймовірність появи одночасно двох непрацездатних елементів вважаємо настільки малою, що її можна не брати до уваги.
 Загальні методи розрахунку надійності проектованих ТС Символами λ 1, λ 2 , . . , λn - позначені інтенсивності відмов, μ 1, μ 2 , …. , μ n – інтенсивності відновлення. По графу станів складаємо систему диференціальних рівнянь: dp 1/dt = λ 1 p 0 - μ 1 p 1(t) dp 2/dt = λ 2 p 0 - μ 2 p 2(t) ……………. dpn/dt = λn p 0 - μn pn(t), n яку доповнимо нормуючою умовою: Σ Pj (t) = 1. j=0 У сталому режимі експлуатації ці рівняння матимуть вигляд λ 1 p 0 - μ 1 p 1(t) =0 λ 2 p 0 - μ 2 p 2(t) =0 ………………… λn p 0 - μn pn(t) =0 Вирішивши систему алгебраїчних рівнянь з урахуванням нормуючої умови, отримаємо: n Кг. С = p 0 = 1/ [1 + Σ (λj / μj )] j=1
Загальні методи розрахунку надійності проектованих ТС Символами λ 1, λ 2 , . . , λn - позначені інтенсивності відмов, μ 1, μ 2 , …. , μ n – інтенсивності відновлення. По графу станів складаємо систему диференціальних рівнянь: dp 1/dt = λ 1 p 0 - μ 1 p 1(t) dp 2/dt = λ 2 p 0 - μ 2 p 2(t) ……………. dpn/dt = λn p 0 - μn pn(t), n яку доповнимо нормуючою умовою: Σ Pj (t) = 1. j=0 У сталому режимі експлуатації ці рівняння матимуть вигляд λ 1 p 0 - μ 1 p 1(t) =0 λ 2 p 0 - μ 2 p 2(t) =0 ………………… λn p 0 - μn pn(t) =0 Вирішивши систему алгебраїчних рівнянь з урахуванням нормуючої умови, отримаємо: n Кг. С = p 0 = 1/ [1 + Σ (λj / μj )] j=1
 =") Загальні методи розрахунку надійності проектованих ТС Імовірність знаходження системи в j-му стані: pj(t) = (λj / μj ) p 0 Взявши до уваги співвідношення Кг = μ / (λ + μ), виразимо μj = λj [Кгj /(1 - Кгj)], з урахуванням чого отримаємо: n Кг. С = 1/ [1 + Σ j=1 (1/(Кгj - 1))] Так для n = 3, Кг 1 =0, 6, Кг 2 =0, 7, Кг 3 = 0, 8 Кг. С = 0, 43
Загальні методи розрахунку надійності проектованих ТС Імовірність знаходження системи в j-му стані: pj(t) = (λj / μj ) p 0 Взявши до уваги співвідношення Кг = μ / (λ + μ), виразимо μj = λj [Кгj /(1 - Кгj)], з урахуванням чого отримаємо: n Кг. С = 1/ [1 + Σ j=1 (1/(Кгj - 1))] Так для n = 3, Кг 1 =0, 6, Кг 2 =0, 7, Кг 3 = 0, 8 Кг. С = 0, 43
 Загальні методи розрахунку надійності проектованих ТС Метод оцінки надійності по графу можливих станів системи Цей метод базується на методі диференціальних рівнянь і зводиться до вирішування системи лінійних алгебраїчних рівнянь. Структура детермінантів цієї системи рівнянь дозволяє сформулювати правило знаходження виразів для показників надійності безпосередньо по графу можливих станів ТС. Таке правило для визначення стаціонарної ймовірності перебування ТС в j-му стані полягає в наступному: проходяться найкоротші шляхи (без повернення) з усіх крайніх станів у кожний стан ТС за напрямом стрілок і перемножуються при цьому всі інтенсивності переходів за умови, що кожна інтенсивність переходу враховується тільки один раз. Імовірність знаходження ТС в j-му стані для графів без кілець визначається за формулою: к Pj (t) = Δj / Σ Δі , і=0 де Δj , Δі - добуток інтенсивностей переходів з усіх крайніх станів ТС до відповідно j - го та і-го станів в при русі по найкоротшому шляху в напряму стрілок; (К+1) - число станів системи.
Загальні методи розрахунку надійності проектованих ТС Метод оцінки надійності по графу можливих станів системи Цей метод базується на методі диференціальних рівнянь і зводиться до вирішування системи лінійних алгебраїчних рівнянь. Структура детермінантів цієї системи рівнянь дозволяє сформулювати правило знаходження виразів для показників надійності безпосередньо по графу можливих станів ТС. Таке правило для визначення стаціонарної ймовірності перебування ТС в j-му стані полягає в наступному: проходяться найкоротші шляхи (без повернення) з усіх крайніх станів у кожний стан ТС за напрямом стрілок і перемножуються при цьому всі інтенсивності переходів за умови, що кожна інтенсивність переходу враховується тільки один раз. Імовірність знаходження ТС в j-му стані для графів без кілець визначається за формулою: к Pj (t) = Δj / Σ Δі , і=0 де Δj , Δі - добуток інтенсивностей переходів з усіх крайніх станів ТС до відповідно j - го та і-го станів в при русі по найкоротшому шляху в напряму стрілок; (К+1) - число станів системи.
 Загальні методи розрахунку надійності проектованих ТС Крайніми вважаються стани, які не мають стрілок, що виходять з них, при невідновлювальній системі і мають не більше однієї стрілки, що виходить з них, при відновлюваної системі. Застосовуючи сформульоване правило, можна отримати формулу для коефіцієнта готовності системи Кгс без складання і рішення диференціальних рівнянь. Приклад. ТС складається з трьох вузлів (елементів). Відмова будь-якого вузла – відмова всієї ТС. Відомі інтенсивності відмов λ 1, λ 2 , λ 3 та інтенсивності відновлення μ 1, μ 2, μ 3 вузлів ТС. Визначимо Кгс.
Загальні методи розрахунку надійності проектованих ТС Крайніми вважаються стани, які не мають стрілок, що виходять з них, при невідновлювальній системі і мають не більше однієї стрілки, що виходить з них, при відновлюваної системі. Застосовуючи сформульоване правило, можна отримати формулу для коефіцієнта готовності системи Кгс без складання і рішення диференціальних рівнянь. Приклад. ТС складається з трьох вузлів (елементів). Відмова будь-якого вузла – відмова всієї ТС. Відомі інтенсивності відмов λ 1, λ 2 , λ 3 та інтенсивності відновлення μ 1, μ 2, μ 3 вузлів ТС. Визначимо Кгс.
 Загальні методи розрахунку надійності проектованих ТС Використовуючи викладене правило, визначаємо по графу (див. рис. ) коефіцієнт готовності ТС: КГС = p 0 = Δ 0 / [Δ 0 + Δ 1 + Δ 2 + Δ 3], де Δ 0 = μ 1 μ 2 μ 3 ; Δ 2 = μ 1 λ 2 μ 3 ; Δ 1 = λ 1 μ 2 μ 3 ; Δ 3= μ 1 μ 2 λ 3. Або КГС = (μ 1 μ 2 μ 3)/(μ 1 μ 2 μ 3 + λ 1 μ 2 μ 3+ μ 1 λ 2 μ 3+ μ 1 μ 2 λ 3) = = 1/ (1+ λ 1/μ 1 + λ 2/μ 2 + λ 3/μ 3).
Загальні методи розрахунку надійності проектованих ТС Використовуючи викладене правило, визначаємо по графу (див. рис. ) коефіцієнт готовності ТС: КГС = p 0 = Δ 0 / [Δ 0 + Δ 1 + Δ 2 + Δ 3], де Δ 0 = μ 1 μ 2 μ 3 ; Δ 2 = μ 1 λ 2 μ 3 ; Δ 1 = λ 1 μ 2 μ 3 ; Δ 3= μ 1 μ 2 λ 3. Або КГС = (μ 1 μ 2 μ 3)/(μ 1 μ 2 μ 3 + λ 1 μ 2 μ 3+ μ 1 λ 2 μ 3+ μ 1 μ 2 λ 3) = = 1/ (1+ λ 1/μ 1 + λ 2/μ 2 + λ 3/μ 3).
 Резервування ТС Резервування - метод підвищення надійності ТС за рахунок введення надмірності. Під надмірністю при цьому розуміють додаткові засоби і можливості понад мінімально необхідних для виконання ТС заданих функцій. Таким чином, завданням введення надмірності є забезпечення нормального функціонування ТС після виникнення відмов в її елементах. Розрізняють три основних види резервування: - структурне, - інформаційне, - часове. Структурне резервування (або апаратне) передбачає використання надлишкових елементів ТС. Його суть полягає в тому, що в мінімально необхідний варіант системи, елементи якої називають основними, вводяться додаткові елементи, вузли, пристрої або навіть замість однієї системи передбачається використання декількох ідентичних систем. При цьому надлишкові резервні структурні елементи, вузли, пристрої і т. д. призначені для виконання робочих функцій при відмові відповідних основних елементів, вузлів і пристроїв.
Резервування ТС Резервування - метод підвищення надійності ТС за рахунок введення надмірності. Під надмірністю при цьому розуміють додаткові засоби і можливості понад мінімально необхідних для виконання ТС заданих функцій. Таким чином, завданням введення надмірності є забезпечення нормального функціонування ТС після виникнення відмов в її елементах. Розрізняють три основних види резервування: - структурне, - інформаційне, - часове. Структурне резервування (або апаратне) передбачає використання надлишкових елементів ТС. Його суть полягає в тому, що в мінімально необхідний варіант системи, елементи якої називають основними, вводяться додаткові елементи, вузли, пристрої або навіть замість однієї системи передбачається використання декількох ідентичних систем. При цьому надлишкові резервні структурні елементи, вузли, пристрої і т. д. призначені для виконання робочих функцій при відмові відповідних основних елементів, вузлів і пристроїв.
 Резервування ТС Інформаційне резервування передбачає використання надлишкової інформації. Найпростішим прикладом його реалізації є багаторазова передача одного і того ж повідомлення по каналу зв'язку. Іншого приклад – використання спеціальних кодів, що виявляють та виправляють помилки, які з'являються в результаті збоїв і відмов апаратури (коди з повторенням і інверсією, циклічні коди, код Хеммінга, багатократні повторення обчислень і т. д. ). Слід зауважити, що використання інформаційного резервування спричиняє також необхідність введення надлишкових елементів у ТС. Часове резервування передбачає використання надлишкового часу. У разі його застосування передбачається можливість відновлення функціонування ТС після того, як воно було перерване в результаті відмови, шляхом його відновлення у резервний час. Вочевидь при цьому передбачається, що на виконання ТС необхідної роботи відводиться час, свідомо більше мінімально необхідного. Перераховані види резервування можуть бути застосовані або до ТС в цілому, або до окремих її елементів, або до груп таких елементів. У першому випадку резервування називається загальним, у другому – роздільним.
Резервування ТС Інформаційне резервування передбачає використання надлишкової інформації. Найпростішим прикладом його реалізації є багаторазова передача одного і того ж повідомлення по каналу зв'язку. Іншого приклад – використання спеціальних кодів, що виявляють та виправляють помилки, які з'являються в результаті збоїв і відмов апаратури (коди з повторенням і інверсією, циклічні коди, код Хеммінга, багатократні повторення обчислень і т. д. ). Слід зауважити, що використання інформаційного резервування спричиняє також необхідність введення надлишкових елементів у ТС. Часове резервування передбачає використання надлишкового часу. У разі його застосування передбачається можливість відновлення функціонування ТС після того, як воно було перерване в результаті відмови, шляхом його відновлення у резервний час. Вочевидь при цьому передбачається, що на виконання ТС необхідної роботи відводиться час, свідомо більше мінімально необхідного. Перераховані види резервування можуть бути застосовані або до ТС в цілому, або до окремих її елементів, або до груп таких елементів. У першому випадку резервування називається загальним, у другому – роздільним.
 Резервування ТС Найбільш широке поширення на даний час отримало структурне резервування. ТС з використанням цього виду резервування можуть класифікуватися за різними ознаками, основними з яких є (див. схему): 1. Реакція ТС на появу відмови; 2. Режим роботи резервних елементів; 3. Вид схеми резервування; 4. Спосіб включення резервних елементів; 5. Ступінь надмірності. За першою ознакою різні резервовані ТС відрізняються одні від інших реакцією на появу відмов, тобто своїми «динамічними» властивостями. З цієї точки зору розрізняють два методи резервування: активне і пасивне. При активному резервуванні структура ТС така, що при появі відмови вона перебудовується й відбувається відновлення її працездатності, тобто відбувається як би «саморемонт» ТС, тобто ТС активно реагує на появу відмови. При пасивному резервуванні ТС відмова одного або навіть декількох елементів не впливає на її роботу. Елементи з'єднані постійно і перестроювання структури не відбувається. ТС як би пасивно чинить опір появі відмов елементів. Як при активному, так і при пасивному методах резервування велике значення мають режими роботи резерву. Однак, якщо в першому випадку для розрахунку важливо знати навантаження на резервні елементи до появи відмови, то в другому випадку - після появи відмови.
Резервування ТС Найбільш широке поширення на даний час отримало структурне резервування. ТС з використанням цього виду резервування можуть класифікуватися за різними ознаками, основними з яких є (див. схему): 1. Реакція ТС на появу відмови; 2. Режим роботи резервних елементів; 3. Вид схеми резервування; 4. Спосіб включення резервних елементів; 5. Ступінь надмірності. За першою ознакою різні резервовані ТС відрізняються одні від інших реакцією на появу відмов, тобто своїми «динамічними» властивостями. З цієї точки зору розрізняють два методи резервування: активне і пасивне. При активному резервуванні структура ТС така, що при появі відмови вона перебудовується й відбувається відновлення її працездатності, тобто відбувається як би «саморемонт» ТС, тобто ТС активно реагує на появу відмови. При пасивному резервуванні ТС відмова одного або навіть декількох елементів не впливає на її роботу. Елементи з'єднані постійно і перестроювання структури не відбувається. ТС як би пасивно чинить опір появі відмов елементів. Як при активному, так і при пасивному методах резервування велике значення мають режими роботи резерву. Однак, якщо в першому випадку для розрахунку важливо знати навантаження на резервні елементи до появи відмови, то в другому випадку - після появи відмови.
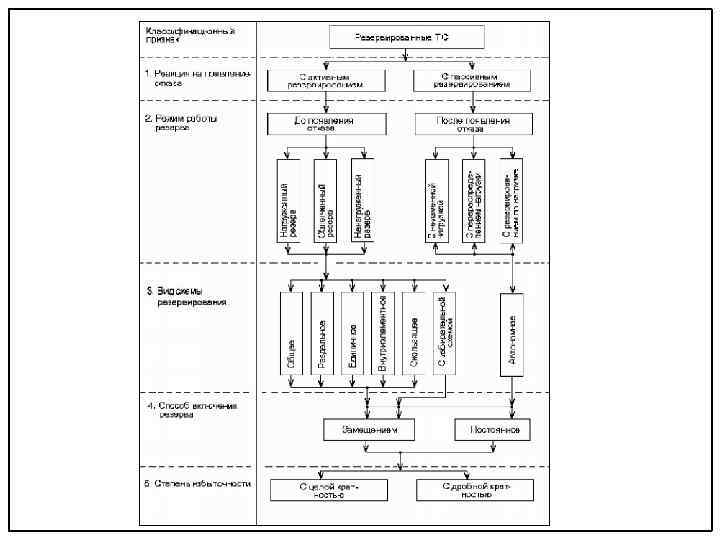
 Резервування ТС За режимом роботи резерву для активного резервування розрізняють навантажений, полегшений і ненавантажений резерви. Навантажений резерв - резервний елемент знаходиться в тому ж режимі, що й основний. При цьому рахується, що характеристики надійності резервних елементів у період їх перебування в якості резервних і в період їх використання замість основних після відмови останніх залишаються незмінними. Полегшений резерв - резервний елемент знаходиться в менш навантаженому режимі, ніж основний. При цьому рахується, що характеристики надійності резервних елементів у період їх перебування в якості резервних вище, ніж у період їх використання замість основних після їх відмови. Ненавантажений резерв - резервний елемент практично не несе навантаження до початку виконання ним функцій основного елемента. При цьому рахується, що такий резервний елемент, перебуваючи в резерві, відмовляти не повинен, тобто володіє в цей період «ідеальною» надійністю. У період же використання резервного елемента замість основного після відмови останнього надійність резервного елемента стає рівною надійності основного.
Резервування ТС За режимом роботи резерву для активного резервування розрізняють навантажений, полегшений і ненавантажений резерви. Навантажений резерв - резервний елемент знаходиться в тому ж режимі, що й основний. При цьому рахується, що характеристики надійності резервних елементів у період їх перебування в якості резервних і в період їх використання замість основних після відмови останніх залишаються незмінними. Полегшений резерв - резервний елемент знаходиться в менш навантаженому режимі, ніж основний. При цьому рахується, що характеристики надійності резервних елементів у період їх перебування в якості резервних вище, ніж у період їх використання замість основних після їх відмови. Ненавантажений резерв - резервний елемент практично не несе навантаження до початку виконання ним функцій основного елемента. При цьому рахується, що такий резервний елемент, перебуваючи в резерві, відмовляти не повинен, тобто володіє в цей період «ідеальною» надійністю. У період же використання резервного елемента замість основного після відмови останнього надійність резервного елемента стає рівною надійності основного.
 Резервування ТС При відмові хоча б одного з елементів ТС з пасивним резервуванням може змінюватися навантаження, що сприймається елементами, які залишилися працездатними. Тому в таких ТС аналізують умови роботи елементів після появи відмови, тобто стабільність навантаження на елементи, що залишилися працездатними. За цією ознакою розрізняють три види ТС з пасивним резервуванням: З незмінним навантаженням - при відмові окремих елементів не змінюється навантаження на елементи, що залишилися працездатними (найбільший виграш в надійності); З перерозподілом навантаження - при відмові хоча б одного елемента змінюється (збільшується) навантаження на працездатні елементи; З навантажувальним резервуванням (резервуванням за навантаженням), в яких при відмові хоча б одного елемента – ТС виходить з ладу, але інтенсивність відмов елементів зменшена за рахунок того, що навантаження, яке мав сприймати один елемент, сприймається кількома елементами (найменший виграш в надійності); . Слід відзначити, що в ТС з активним резервуванням відбувається порушення роботи об'єкту на час з моменту відмови основного елемента до моменту включення резервного. Таким чином, якщо така перерва в роботі ТС принципово неприпустима, то можливе тільки пасивне резервування, що є одним з суттєвих моментів, для уваги розробника ТС при виборі між активним і пасивним методами резервування.
Резервування ТС При відмові хоча б одного з елементів ТС з пасивним резервуванням може змінюватися навантаження, що сприймається елементами, які залишилися працездатними. Тому в таких ТС аналізують умови роботи елементів після появи відмови, тобто стабільність навантаження на елементи, що залишилися працездатними. За цією ознакою розрізняють три види ТС з пасивним резервуванням: З незмінним навантаженням - при відмові окремих елементів не змінюється навантаження на елементи, що залишилися працездатними (найбільший виграш в надійності); З перерозподілом навантаження - при відмові хоча б одного елемента змінюється (збільшується) навантаження на працездатні елементи; З навантажувальним резервуванням (резервуванням за навантаженням), в яких при відмові хоча б одного елемента – ТС виходить з ладу, але інтенсивність відмов елементів зменшена за рахунок того, що навантаження, яке мав сприймати один елемент, сприймається кількома елементами (найменший виграш в надійності); . Слід відзначити, що в ТС з активним резервуванням відбувається порушення роботи об'єкту на час з моменту відмови основного елемента до моменту включення резервного. Таким чином, якщо така перерва в роботі ТС принципово неприпустима, то можливе тільки пасивне резервування, що є одним з суттєвих моментів, для уваги розробника ТС при виборі між активним і пасивним методами резервування.
 Резервування ТС За схемами організації резерву розрізняють резервування загальне, автономне, роздільне, одиничне, внутрішньоелементне, ковзне, за відбірковими схемами. Загальне резервування полягає в резервуванні ТС в цілому і, завдяки своїй простоті, цей спосіб є найбільш відомим. Автономне резервування - один з варіантів загального і полягає у використанні декількох незалежних об'єктів, які виконують одне й теж завдання. Кожен з цих об'єктів має свій вхід і вихід і, звичайно, незалежні джерела живлення. Прикладом об'єктів з автономним резервуванням може бути сукупність пристроїв телевимірювання, які виконують одне й теж завдання, якщо кожен пристрій має свої вхідні датчики, блоки, що записують вихідні дані та джерела живлення. Автономне резервування зазвичай застосовується при проведенні відповідальних експериментів у системах відповідального призначення. При цьому автономне резервування завжди є пасивним. Роздільне резервування полягає в резервуванні ТС по окремих елементах або їх групах (ділянках). ТС з активним загальним резервуванням можна вважати окремим випадком ТС з роздільним резервуванням при одній ділянці резервування.
Резервування ТС За схемами організації резерву розрізняють резервування загальне, автономне, роздільне, одиничне, внутрішньоелементне, ковзне, за відбірковими схемами. Загальне резервування полягає в резервуванні ТС в цілому і, завдяки своїй простоті, цей спосіб є найбільш відомим. Автономне резервування - один з варіантів загального і полягає у використанні декількох незалежних об'єктів, які виконують одне й теж завдання. Кожен з цих об'єктів має свій вхід і вихід і, звичайно, незалежні джерела живлення. Прикладом об'єктів з автономним резервуванням може бути сукупність пристроїв телевимірювання, які виконують одне й теж завдання, якщо кожен пристрій має свої вхідні датчики, блоки, що записують вихідні дані та джерела живлення. Автономне резервування зазвичай застосовується при проведенні відповідальних експериментів у системах відповідального призначення. При цьому автономне резервування завжди є пасивним. Роздільне резервування полягає в резервуванні ТС по окремих елементах або їх групах (ділянках). ТС з активним загальним резервуванням можна вважати окремим випадком ТС з роздільним резервуванням при одній ділянці резервування.
 Резервування ТС Структури загального резервування: а - схема загального активного резервування; б - схема автономного резервування; Вх. Б - вхідний блок; ТС 0 - основні ТС; ТСР - резервні ТС; Пi - перемикачі; Вих. Б - вихідний блок.
Резервування ТС Структури загального резервування: а - схема загального активного резервування; б - схема автономного резервування; Вх. Б - вхідний блок; ТС 0 - основні ТС; ТСР - резервні ТС; Пi - перемикачі; Вих. Б - вихідний блок.
.") Резервування ТС Одиничне резервування полягає в заміні елементів ТС елементарними резервованим схемами (зазвичай пасивними). У складних ТС важко знайти раціональну схему роздільного резервування. Крім того, схеми резервування різних ТС кожен раз доводиться проектувати знову, що вимагає іноді досить значних матеріальних витрат і часу. Тому одиничне резервування, при якому найпростіші схеми резерву типових елементів можуть виконуватися у вигляді готових блоків (чарунок), часто виявляється зручним через простоту побудови складних резервованих ТС. При одиничному резервуванні не потрібно складати спеціальних схем, а можна просто ставити на місце кожного елемента у функціональній схемі ТС його аналог - типову резервовану чарунку. Внутришньоелементне резервування полягає в резервуванні внутрішніх зв'язків елемента. Якщо при одиничному резервуванні використовуються схеми з існуючих елементів (комірки), то застосування внутришньоелементного резервування пов'язане зі зміною конструкції елемента. Прикладом використання такого резервування може бути так званий релер – резервоване реле.
Резервування ТС Одиничне резервування полягає в заміні елементів ТС елементарними резервованим схемами (зазвичай пасивними). У складних ТС важко знайти раціональну схему роздільного резервування. Крім того, схеми резервування різних ТС кожен раз доводиться проектувати знову, що вимагає іноді досить значних матеріальних витрат і часу. Тому одиничне резервування, при якому найпростіші схеми резерву типових елементів можуть виконуватися у вигляді готових блоків (чарунок), часто виявляється зручним через простоту побудови складних резервованих ТС. При одиничному резервуванні не потрібно складати спеціальних схем, а можна просто ставити на місце кожного елемента у функціональній схемі ТС його аналог - типову резервовану чарунку. Внутришньоелементне резервування полягає в резервуванні внутрішніх зв'язків елемента. Якщо при одиничному резервуванні використовуються схеми з існуючих елементів (комірки), то застосування внутришньоелементного резервування пов'язане зі зміною конструкції елемента. Прикладом використання такого резервування може бути так званий релер – резервоване реле.
 Резервування ТС Ковзне резервування застосовується в ТС з великою кількістю однакових елементів. Воно полягає в тому, що використовується невелика кількість резервних елементів, які можуть підключатися замість будь-якого з елементів, що відмовили, основної ТС. При резервуванні за відбірковою схемою порівнюються сигнали на виході непарного числа паралельно працюючих пристроїв, а за вихідний сигнал підсистеми (елементу) приймається той, що є на виході більшості пристроїв. Відбіркові схеми застосовуються в тих випадках, коли важко встановити, відмовили чи ні окремі пристрої. За способом включення резервних елементів схеми резервування поділяються на схеми з постійно включеним резервом (постійне резервування) і схеми резервування заміщенням. При постійному резервуванні - резервні елементи беруть участь у функціонуванні ТС нарівні з основними. При цьому основні і резервні елементи можуть як мати загальний вхід і спільний вихід, так і можуть бути і автономними. Тут у разі відмови основного елемента не потрібно спеціальних перемикаючих пристроїв, які вводять у дію резервний елемент, оскільки він вводиться в дію одночасно з основним. При резервуванні заміщенням - функції основного елемента передаються резервному тільки після відмови основного. Тут необхідні контролюючі і перемикаючі пристрої для виявлення факту відмови основного елемента і здійснення перемикання з основного на резервний.
Резервування ТС Ковзне резервування застосовується в ТС з великою кількістю однакових елементів. Воно полягає в тому, що використовується невелика кількість резервних елементів, які можуть підключатися замість будь-якого з елементів, що відмовили, основної ТС. При резервуванні за відбірковою схемою порівнюються сигнали на виході непарного числа паралельно працюючих пристроїв, а за вихідний сигнал підсистеми (елементу) приймається той, що є на виході більшості пристроїв. Відбіркові схеми застосовуються в тих випадках, коли важко встановити, відмовили чи ні окремі пристрої. За способом включення резервних елементів схеми резервування поділяються на схеми з постійно включеним резервом (постійне резервування) і схеми резервування заміщенням. При постійному резервуванні - резервні елементи беруть участь у функціонуванні ТС нарівні з основними. При цьому основні і резервні елементи можуть як мати загальний вхід і спільний вихід, так і можуть бути і автономними. Тут у разі відмови основного елемента не потрібно спеціальних перемикаючих пристроїв, які вводять у дію резервний елемент, оскільки він вводиться в дію одночасно з основним. При резервуванні заміщенням - функції основного елемента передаються резервному тільки після відмови основного. Тут необхідні контролюючі і перемикаючі пристрої для виявлення факту відмови основного елемента і здійснення перемикання з основного на резервний.
 Резервування ТС Ще однією класифікаційною ознакою резервованих ТС є ступінь надмірності, яка характеризується кратністю резервування. Кратність резервування - це відношення числа резервних елементів до числа зарезервованих або основних елементів ТС. Розрізняють резервування з цілою і дробовою кратністю. Резервування з цілою кратністю має місце, коли один основний елемент резервується одним і більше резервними елементами. Резервування з дробової кратністю має місце, коли два і більше однотипних елементів резервуються одним і більше резервними елементами. Найбільш поширеним варіантом резервування з дробової кратністю є такий, коли число основних елементів перевищує число резервних. Резервування, кратність якого дорівнює одиниці, називається дублюванням. Надійність ТС в значній мірі визначається застосуванням резервування з відновленням або без нього. Резервування, при якому працездатність будь-якого основного і резервного елементів ТС у разі виникнення відмов підлягає відновленню в процесі експлуатації системи, називається резервуванням з відновленням. В іншому випадку має місце резервування без відновлення.
Резервування ТС Ще однією класифікаційною ознакою резервованих ТС є ступінь надмірності, яка характеризується кратністю резервування. Кратність резервування - це відношення числа резервних елементів до числа зарезервованих або основних елементів ТС. Розрізняють резервування з цілою і дробовою кратністю. Резервування з цілою кратністю має місце, коли один основний елемент резервується одним і більше резервними елементами. Резервування з дробової кратністю має місце, коли два і більше однотипних елементів резервуються одним і більше резервними елементами. Найбільш поширеним варіантом резервування з дробової кратністю є такий, коли число основних елементів перевищує число резервних. Резервування, кратність якого дорівнює одиниці, називається дублюванням. Надійність ТС в значній мірі визначається застосуванням резервування з відновленням або без нього. Резервування, при якому працездатність будь-якого основного і резервного елементів ТС у разі виникнення відмов підлягає відновленню в процесі експлуатації системи, називається резервуванням з відновленням. В іншому випадку має місце резервування без відновлення.
 Розрахунок надійності ТС при структурному резервуванні Загальне резервування з постійно включеним резервом і цілою кратністю За розрахунково-логічною схемою для постійного включення резерву основний ланцюг складається з n - елементів 01, 02, . . . , 0 n. Кожен з т резервуючих ланцюгів також включає в себе n елементів Р 1, Р 2, . . . Рn. Для простоти вважаємо, що основний та резервні ланцюги мають однакову надійність. Кратність такої схеми резервування дорівнює т. Отже, за даною схемою відмова ТС настає при відмові всіх (т +1) ланцюгів - як основного, так і резервних. Будемо вважати також, що основний і резервний ланцюги включаються в роботу одночасно (навантажений резерв), але використовується лише один ланцюг – основний. При відмові основного ланцюга його функції без будь-якої перерви починає виконувати один з резервних.
Розрахунок надійності ТС при структурному резервуванні Загальне резервування з постійно включеним резервом і цілою кратністю За розрахунково-логічною схемою для постійного включення резерву основний ланцюг складається з n - елементів 01, 02, . . . , 0 n. Кожен з т резервуючих ланцюгів також включає в себе n елементів Р 1, Р 2, . . . Рn. Для простоти вважаємо, що основний та резервні ланцюги мають однакову надійність. Кратність такої схеми резервування дорівнює т. Отже, за даною схемою відмова ТС настає при відмові всіх (т +1) ланцюгів - як основного, так і резервних. Будемо вважати також, що основний і резервний ланцюги включаються в роботу одночасно (навантажений резерв), але використовується лише один ланцюг – основний. При відмові основного ланцюга його функції без будь-якої перерви починає виконувати один з резервних.
 Розрахунок надійності ТС при структурному резервуванні Ймовірність безвідмовної роботи резервованої ТС буде визначатися: n Pтс(t) = 1 – [1 - ΠPi(t)](m+1) i=1 де Pi(t) - ймовірність безвідмовної роботи i-го елемента протягом часу t; n - число елементів основного або будь - якого резервного ланцюга; т - кратність резервування. Якщо час до відмови кожного ланцюга резервованої ТС розподілено за експоненціальним законом, то в цьому випадку для ймовірності безвідмовної роботи: Pтс(t) = 1 – [1 – exp{- λ 0 t}](m+1) (а) Середній наробіток на відмову для експоненціального розподілу: m m Ттс0 = (1/λ 0)i=0 ∑(1/(i + 1) = ТO 0 i=0 ∑(1/(i + 1), n де λ 0 = ∑ λ– i=0 i (б) інтенсивність відмов основного ланцюга або будь-якого з резервних; ТO 0 - середнє напрацювання до відмови основного ланцюга або будь якого з резервних;
Розрахунок надійності ТС при структурному резервуванні Ймовірність безвідмовної роботи резервованої ТС буде визначатися: n Pтс(t) = 1 – [1 - ΠPi(t)](m+1) i=1 де Pi(t) - ймовірність безвідмовної роботи i-го елемента протягом часу t; n - число елементів основного або будь - якого резервного ланцюга; т - кратність резервування. Якщо час до відмови кожного ланцюга резервованої ТС розподілено за експоненціальним законом, то в цьому випадку для ймовірності безвідмовної роботи: Pтс(t) = 1 – [1 – exp{- λ 0 t}](m+1) (а) Середній наробіток на відмову для експоненціального розподілу: m m Ттс0 = (1/λ 0)i=0 ∑(1/(i + 1) = ТO 0 i=0 ∑(1/(i + 1), n де λ 0 = ∑ λ– i=0 i (б) інтенсивність відмов основного ланцюга або будь-якого з резервних; ТO 0 - середнє напрацювання до відмови основного ланцюга або будь якого з резервних;
 Розрахунок надійності ТС при структурному резервуванні Роздільне резервування з постійно включеним резервом і цілою кратністю m При роздільному резервуванні кожен елемент основного ланцюга Оі має свої резервні елементи Рі і відповідно свою кратність резервування mі. В окремому випадку кратність резервування може бути і однаковою для всіх основних елементів. Ймовірність безвідмовної роботи ТС з роздільним резервуванням: n Pтс(t) = Π {1 – [1 - Pi(t)](mi+1)} i=1
Розрахунок надійності ТС при структурному резервуванні Роздільне резервування з постійно включеним резервом і цілою кратністю m При роздільному резервуванні кожен елемент основного ланцюга Оі має свої резервні елементи Рі і відповідно свою кратність резервування mі. В окремому випадку кратність резервування може бути і однаковою для всіх основних елементів. Ймовірність безвідмовної роботи ТС з роздільним резервуванням: n Pтс(t) = Π {1 – [1 - Pi(t)](mi+1)} i=1
 буде дорівнювати: n Pтс(t)") Розрахунок надійності ТС при структурному резервуванні При експоненціальному розподілі Pтс(t) буде дорівнювати: n Pтс(t) = Π {1 – [1 - exp{- λ 0 t}](mi+1)} i=1 В окремому випадку при рівній надійності основних і резервних елементів, а також при однаковій кратності резервування отримаємо: Pтс(t) = {1 – [1 - exp{- λ 0 t}](mi+1)}n Середнє напрацювання на відмову при цьому буде визначатися як: ∞ m Ттс0 = ∫Pтс(t) dt = (n-1)!/ λ 0(m+1)∑{1/[(vi (vi+1) … (vi + n+1)]}, 0 де vi = (i+1)/(m+1) i=1
Розрахунок надійності ТС при структурному резервуванні При експоненціальному розподілі Pтс(t) буде дорівнювати: n Pтс(t) = Π {1 – [1 - exp{- λ 0 t}](mi+1)} i=1 В окремому випадку при рівній надійності основних і резервних елементів, а також при однаковій кратності резервування отримаємо: Pтс(t) = {1 – [1 - exp{- λ 0 t}](mi+1)}n Середнє напрацювання на відмову при цьому буде визначатися як: ∞ m Ттс0 = ∫Pтс(t) dt = (n-1)!/ λ 0(m+1)∑{1/[(vi (vi+1) … (vi + n+1)]}, 0 де vi = (i+1)/(m+1) i=1
 Розрахунок надійності ТС при структурному резервуванні Загальне та роздільне резервування заміщенням і цілою кратністю При резервуванні заміщенням у разі відмови основного елемента вручну або автоматично за допомогою спеціального перемикача в схему ТС включаються резервні елементи. Відмова резервованої ТС при цьому настає після відмови останнього резервного елемента. Якщо припустити наявність «ідеального» ( «абсолютно надійного» ) перемикача, то розрахунок ймовірності безвідмовної роботи ТС можна зробити за такою рекурентною формулою: t Рm+1(t) = Рm(t) + ∫Р(t - τ) fm(τ) dτ, 0 де Рm+1(t), Рm(t) - ймовірності безвідмовної роботи резервованої ТС кратності (m+1) и т відповідно; Р(t - τ) - ймовірність безвідмовної роботи основного елемента ТС протягом часу (t - τ); fm(τ) - частота відмов резервованої ТС кратності т в момент часу τ. Ця рекурентна формула дозволяє отримувати розрахункові співвідношення для ТС будь-якої кратності резервування, виконавши інтегрування в правій її частині з урахуванням заміни Р(t - τ) і fm(τ) на їх значення у відповідності з обраним законом розподілу і станом резерву.
Розрахунок надійності ТС при структурному резервуванні Загальне та роздільне резервування заміщенням і цілою кратністю При резервуванні заміщенням у разі відмови основного елемента вручну або автоматично за допомогою спеціального перемикача в схему ТС включаються резервні елементи. Відмова резервованої ТС при цьому настає після відмови останнього резервного елемента. Якщо припустити наявність «ідеального» ( «абсолютно надійного» ) перемикача, то розрахунок ймовірності безвідмовної роботи ТС можна зробити за такою рекурентною формулою: t Рm+1(t) = Рm(t) + ∫Р(t - τ) fm(τ) dτ, 0 де Рm+1(t), Рm(t) - ймовірності безвідмовної роботи резервованої ТС кратності (m+1) и т відповідно; Р(t - τ) - ймовірність безвідмовної роботи основного елемента ТС протягом часу (t - τ); fm(τ) - частота відмов резервованої ТС кратності т в момент часу τ. Ця рекурентна формула дозволяє отримувати розрахункові співвідношення для ТС будь-якої кратності резервування, виконавши інтегрування в правій її частині з урахуванням заміни Р(t - τ) і fm(τ) на їх значення у відповідності з обраним законом розподілу і станом резерву.
 Розрахунок надійності ТС при структурному резервуванні Резервування заміщенням: а - загальне; б - роздільне.
Розрахунок надійності ТС при структурному резервуванні Резервування заміщенням: а - загальне; б - роздільне.
 Розрахунок надійності ТС при структурному резервуванні При загальному резервуванні заміщенням і навантаженому резерві (рис. а) для підрахунку РТС(t) і Ттс0 використовують вирази (а) і (б). При ненавантаженому резерві і експоненціальному законі розподілу часу безвідмовної роботи ймовірність РТС(t) і середнє напрацювання Ттс0 визначаються: m РТС(t) = exp{- λ 0 t } ∑[(λ 0 t)i /i!] (в) i=0 Ттс0 = ТO 0 (m + 1), (г) де λ 0, ТO 0 - інтенсивність відмов і середнє напрацювання до відмови основного ланцюга ТС. У разі роздільного резервування заміщенням (рис. б), кожний елемент основного ланцюга О 1, О 2, . . . , Оn має свої резервні елементи Рi і, відповідно, власну кратність резервування mi, , яка в окремому випадку може бути і однаковою для всіх основних елементів. Поєднуючи в окрему групу кожний елемент основного ланцюга разом зі своїми резервними елементами, отримуємо послідовне з'єднання окремих резервованих груп, які в сукупності і складають резервовану ТС в цілому. Тому, розрахунок надійності кожної резервованої групи можна зробити за відомими вже формулами загального резервування заміщенням: - для навантаженого резерву використовувати формули (а), (б); - для ненавантаженого - (в), (г).
Розрахунок надійності ТС при структурному резервуванні При загальному резервуванні заміщенням і навантаженому резерві (рис. а) для підрахунку РТС(t) і Ттс0 використовують вирази (а) і (б). При ненавантаженому резерві і експоненціальному законі розподілу часу безвідмовної роботи ймовірність РТС(t) і середнє напрацювання Ттс0 визначаються: m РТС(t) = exp{- λ 0 t } ∑[(λ 0 t)i /i!] (в) i=0 Ттс0 = ТO 0 (m + 1), (г) де λ 0, ТO 0 - інтенсивність відмов і середнє напрацювання до відмови основного ланцюга ТС. У разі роздільного резервування заміщенням (рис. б), кожний елемент основного ланцюга О 1, О 2, . . . , Оn має свої резервні елементи Рi і, відповідно, власну кратність резервування mi, , яка в окремому випадку може бути і однаковою для всіх основних елементів. Поєднуючи в окрему групу кожний елемент основного ланцюга разом зі своїми резервними елементами, отримуємо послідовне з'єднання окремих резервованих груп, які в сукупності і складають резервовану ТС в цілому. Тому, розрахунок надійності кожної резервованої групи можна зробити за відомими вже формулами загального резервування заміщенням: - для навантаженого резерву використовувати формули (а), (б); - для ненавантаженого - (в), (г).
 Розрахунок надійності ТС при структурному резервуванні Для визначення показників надійності резервованої ТС в цілому розрахунок ведеться надалі за відомою формулою для послідовного з'єднання елементів. Тобто ймовірність безвідмовної роботи ТС з роздільним резервуванням заміщенням може бути визначена з виразу: n Pтс(t) = ΠPri(t), i=1 де Pri(t) - ймовірність безвідмовної роботи груп, резервованих за способом заміщення елементів основного ланцюга ТС i-го типу, що обчислюється за формулами (а), (б) або (в), (г). Наведені співвідношення отримані для випадку «ідеального» перемикача. Але практично ці перемикачі мають відмови різного характеру, серед яких слід відзначити: 1) неспрацювання при відмові основної апаратури, в результаті чого резервний елемент не буде включений замість основного, що відмовив. Це призведе до відмови всієї резервної групи; 2) помилкове спрацьовування, в результаті чого відбудеться перемикання на резерв при справній основний апаратурі, що призведе до зменшення часу до відмови групи в цілому; 3) відмови, які виводять з ладу резервну групу в цілому.
Розрахунок надійності ТС при структурному резервуванні Для визначення показників надійності резервованої ТС в цілому розрахунок ведеться надалі за відомою формулою для послідовного з'єднання елементів. Тобто ймовірність безвідмовної роботи ТС з роздільним резервуванням заміщенням може бути визначена з виразу: n Pтс(t) = ΠPri(t), i=1 де Pri(t) - ймовірність безвідмовної роботи груп, резервованих за способом заміщення елементів основного ланцюга ТС i-го типу, що обчислюється за формулами (а), (б) або (в), (г). Наведені співвідношення отримані для випадку «ідеального» перемикача. Але практично ці перемикачі мають відмови різного характеру, серед яких слід відзначити: 1) неспрацювання при відмові основної апаратури, в результаті чого резервний елемент не буде включений замість основного, що відмовив. Це призведе до відмови всієї резервної групи; 2) помилкове спрацьовування, в результаті чого відбудеться перемикання на резерв при справній основний апаратурі, що призведе до зменшення часу до відмови групи в цілому; 3) відмови, які виводять з ладу резервну групу в цілому.
 Розрахунок надійності ТС при структурному резервуванні Резервування з дрібною кратністю Схема загального резервування з постійно включеним резервом і дрібною кратністю В цій схемі задіяні l елементів, з яких n - основних і (l-n) – резервних. Якщо (l-n) < n, то має місце дрібна кратність резервування, що дорівнює m = (l-n)/n
Розрахунок надійності ТС при структурному резервуванні Резервування з дрібною кратністю Схема загального резервування з постійно включеним резервом і дрібною кратністю В цій схемі задіяні l елементів, з яких n - основних і (l-n) – резервних. Якщо (l-n) < n, то має місце дрібна кратність резервування, що дорівнює m = (l-n)/n
 Розрахунок надійності ТС при структурному резервуванні Ймовірність безвідмовної роботи ТС та середнього наробітку на відмову для цього випадку резервування при експоненціальному розподілі: Pтс(t) l-n = i=0 Cli ∑ P 0 (l-i)(t) i ∑ (-1)j Cij P 0 j (t), j=0 l-n Ттс0 = 1/λ 0 ∑ 1/(n+i), i=0 де P 0(t) - ймовірність безвідмовної роботи основного або будь-якого резервного елемента. Розрахунково-логічна схема ТС, резервованою заміщенням із дрібною кратністю при навантаженому резерві, наведена на рисунку нижче. Система складається з n основних однотипних і (l-n) резервних елементів, що знаходяться в навантаженому резерві (n>(l-n)). При відмові одного з основних елементів на його місце без перерви в роботі включається один з резервних. Причому резервні елементи також можуть відмовляти. Таких заміщень, що не порушують роботу ТС в цілому, може бути не більше (l -n).
Розрахунок надійності ТС при структурному резервуванні Ймовірність безвідмовної роботи ТС та середнього наробітку на відмову для цього випадку резервування при експоненціальному розподілі: Pтс(t) l-n = i=0 Cli ∑ P 0 (l-i)(t) i ∑ (-1)j Cij P 0 j (t), j=0 l-n Ттс0 = 1/λ 0 ∑ 1/(n+i), i=0 де P 0(t) - ймовірність безвідмовної роботи основного або будь-якого резервного елемента. Розрахунково-логічна схема ТС, резервованою заміщенням із дрібною кратністю при навантаженому резерві, наведена на рисунку нижче. Система складається з n основних однотипних і (l-n) резервних елементів, що знаходяться в навантаженому резерві (n>(l-n)). При відмові одного з основних елементів на його місце без перерви в роботі включається один з резервних. Причому резервні елементи також можуть відмовляти. Таких заміщень, що не порушують роботу ТС в цілому, може бути не більше (l -n).
 Розрахунок надійності ТС при структурному резервуванні Резервування заміщенням з дрібною кратністю Середній наробіток на відмову такої ТС припущенні абсолютно надійних перемикаючих пристроїв і рівнонадійних елементів, кожен з яких має однакову інтенсивність відмов λ 0, може бути визначений як: Ттс0 = 1/λ 0 [1/n+1/(n+1)+…+1/l ] де l - загальне число основних і резервних елементів ТС. Імовірність безвідмовної роботи резервованої ТС за цих умов протягом часу t: l-n Pтс(t) = ∑ Cli [1 -P 0(t)]i [P 0(t)](l-i) i=0 (#)
Розрахунок надійності ТС при структурному резервуванні Резервування заміщенням з дрібною кратністю Середній наробіток на відмову такої ТС припущенні абсолютно надійних перемикаючих пристроїв і рівнонадійних елементів, кожен з яких має однакову інтенсивність відмов λ 0, може бути визначений як: Ттс0 = 1/λ 0 [1/n+1/(n+1)+…+1/l ] де l - загальне число основних і резервних елементів ТС. Імовірність безвідмовної роботи резервованої ТС за цих умов протягом часу t: l-n Pтс(t) = ∑ Cli [1 -P 0(t)]i [P 0(t)](l-i) i=0 (#)
 Розрахунок надійності ТС при структурному резервуванні Окремий випадок резервування з дрібною кратністю, яке часто використовується в пристроях дискретної дії, носить назву мажоритарного резервування. Мажоритарне резервування При мажоритарному резервуванні замість одного елемента (каналу) включаються три ідентичних елемента (канали), виходи яких подаються на мажоритарний орган M (елемент пріоритету). Якщо всі елементи такої резервованої групи справні, то на вхід M надходять три однакових сигнали і такий же сигнал подається назовні з виходу M. Якщо один з трьох резервованих елементів відмовив, то на вхід M надходять два однакових сигналів (істинних) і один сигнал помилковий. На виході M буде сигнал, що співпадає з більшістю ідентичних сигналів на його вході. Мажоритарний орган здійснює операцію визначення пріоритету або вибору по більшості.
Розрахунок надійності ТС при структурному резервуванні Окремий випадок резервування з дрібною кратністю, яке часто використовується в пристроях дискретної дії, носить назву мажоритарного резервування. Мажоритарне резервування При мажоритарному резервуванні замість одного елемента (каналу) включаються три ідентичних елемента (канали), виходи яких подаються на мажоритарний орган M (елемент пріоритету). Якщо всі елементи такої резервованої групи справні, то на вхід M надходять три однакових сигнали і такий же сигнал подається назовні з виходу M. Якщо один з трьох резервованих елементів відмовив, то на вхід M надходять два однакових сигналів (істинних) і один сигнал помилковий. На виході M буде сигнал, що співпадає з більшістю ідентичних сигналів на його вході. Мажоритарний орган здійснює операцію визначення пріоритету або вибору по більшості.
 Розрахунок надійності ТС при структурному резервуванні Отже, умовою безвідмовної роботи ТС є безвідмовна робота будь-яких двох елементів з трьох і мажоритарного органу протягом заданого часу t. Застосовуючи вираз (#) для n = 2 та (l-n)=1 з урахуванням ймовірності безвідмовної роботи протягом часу t мажоритарного органу PM(t), можна визначити ймовірність безвідмовної роботи ТС з мажоритарним резервуванням: Pтс(t) = PM(t) * [3 P 02(t) – 2 P 03(t)] У разі ненавантаженого резерву при резервуванні із дрібною кратністю (його часто називають ковзним) відмова одного з n основних однотипних елементів призводить до включення на його місце одного з (l-n) резервних. При цьому резервні відмовляти не можуть до їх включення на місце основного елементу, що відмовив. Виходячи з цієї умови і враховуючи, що в процесі нормального функціонування ТС в роботі постійно знаходяться n елементів, інтенсивність відмов кожного з яких дорівнює λ 0 , середнє напрацювання до відмови й імовірність безвідмовної роботи в цілому за час t при експоненціальному розподілі можуть визначатися як: Ттс0 = 1/λ 0 [(l-n+1)/n] = ТO 0 [(l-n+1)/n], l-n Pтс(t) = exp[-nλ 0 t]i=0 [(nλ 0 ∑ t)i l-n /i!] = exp[-λt] ∑ [(λt)i /i!], i=0 де ТO 0 − середнє напрацювання на відмову основного або резервного елемента; nλ 0 - інтенсивність відмов основного ланцюга ТС.
Розрахунок надійності ТС при структурному резервуванні Отже, умовою безвідмовної роботи ТС є безвідмовна робота будь-яких двох елементів з трьох і мажоритарного органу протягом заданого часу t. Застосовуючи вираз (#) для n = 2 та (l-n)=1 з урахуванням ймовірності безвідмовної роботи протягом часу t мажоритарного органу PM(t), можна визначити ймовірність безвідмовної роботи ТС з мажоритарним резервуванням: Pтс(t) = PM(t) * [3 P 02(t) – 2 P 03(t)] У разі ненавантаженого резерву при резервуванні із дрібною кратністю (його часто називають ковзним) відмова одного з n основних однотипних елементів призводить до включення на його місце одного з (l-n) резервних. При цьому резервні відмовляти не можуть до їх включення на місце основного елементу, що відмовив. Виходячи з цієї умови і враховуючи, що в процесі нормального функціонування ТС в роботі постійно знаходяться n елементів, інтенсивність відмов кожного з яких дорівнює λ 0 , середнє напрацювання до відмови й імовірність безвідмовної роботи в цілому за час t при експоненціальному розподілі можуть визначатися як: Ттс0 = 1/λ 0 [(l-n+1)/n] = ТO 0 [(l-n+1)/n], l-n Pтс(t) = exp[-nλ 0 t]i=0 [(nλ 0 ∑ t)i l-n /i!] = exp[-λt] ∑ [(λt)i /i!], i=0 де ТO 0 − середнє напрацювання на відмову основного або резервного елемента; nλ 0 - інтенсивність відмов основного ланцюга ТС.
 Розрахунок надійності ТС з часовим резервуванням Використання часової надмірності поряд з структурною є також ефективним способом підвищення надійності ТС. За наявності часової надмірності на виконання ТС будь-якої роботи відводиться час, завідомо більший, ніж мінімально необхідний. У цьому випадку можливі два варіанти використання системи: 1. Коли виконаний обсяг роботи при настанні відмови знецінюється; 2. Коли може відбуватися накопичення роботи, тобто виконаний обсяг роботи при настанні відмови не знецінюється. Пріоритетним є перший варіант. (? ) Нехай відмова ТС знецінює роботу, виконану нею до моменту настання відмови. Тоді робота буде все-таки виконана в повному обсязі, якщо після відмови відбудеться відновлення системи та вільного часу буде достатньо щоб, почавши виконання роботи з самого початку, завершити її у встановлений час. При цьому, природно, можна допустити появу декількох відмов, після кожного з яких ТС відновлюється, і кожен раз робота починається з початку, і так до тих пір, поки робота не буде все-таки виконана в повному обсязі або не буде вичерпано ресурс часу.
Розрахунок надійності ТС з часовим резервуванням Використання часової надмірності поряд з структурною є також ефективним способом підвищення надійності ТС. За наявності часової надмірності на виконання ТС будь-якої роботи відводиться час, завідомо більший, ніж мінімально необхідний. У цьому випадку можливі два варіанти використання системи: 1. Коли виконаний обсяг роботи при настанні відмови знецінюється; 2. Коли може відбуватися накопичення роботи, тобто виконаний обсяг роботи при настанні відмови не знецінюється. Пріоритетним є перший варіант. (? ) Нехай відмова ТС знецінює роботу, виконану нею до моменту настання відмови. Тоді робота буде все-таки виконана в повному обсязі, якщо після відмови відбудеться відновлення системи та вільного часу буде достатньо щоб, почавши виконання роботи з самого початку, завершити її у встановлений час. При цьому, природно, можна допустити появу декількох відмов, після кожного з яких ТС відновлюється, і кожен раз робота починається з початку, і так до тих пір, поки робота не буде все-таки виконана в повному обсязі або не буде вичерпано ресурс часу.
 Розрахунок надійності ТС з часовим резервуванням Характеристиками надійності ТС з часовою надмірністю доцільно обрати наступні: - ймовірність P(t, V) виконання за заданий час t роботи обсягом V (при чому обсяг роботи вимірюється мінімально необхідною тривалістю її виконання за умови відсутності відмов системи, а оскільки має місце тимчасова надмірність, то V
Розрахунок надійності ТС з часовим резервуванням Характеристиками надійності ТС з часовою надмірністю доцільно обрати наступні: - ймовірність P(t, V) виконання за заданий час t роботи обсягом V (при чому обсяг роботи вимірюється мінімально необхідною тривалістю її виконання за умови відсутності відмов системи, а оскільки має місце тимчасова надмірність, то V
 Розрахунок надійності ТС з часовим резервуванням ti V 2 V …. . n. V Pi p (1 -p)p …. . (1 -p)(n-1)p де ti - можливі значення часу виконання роботи (i=1, 2, . . . , n); Pi − ймовірність виконання роботи за час ti ; Р=Р(V) - ймовірність безвідмовної роботи ТС протягом проміжку часу V. Оскільки робота може бути виконана за час V, або за час 2 V і т. д. , причому події tр = ti (tр - випадковий час виконання роботи) є подіями несумісними, то, за теоремою додавання ймовірностей, отримаємо: Р(t, V)= p + (1 -p)p +. . . +(1 -p)(n-1)p Скориставшись формулою для суми геометричної прогресії, остаточно: Р(t, V)= 1 - (1 -p)n Тут слід підкреслити, що отриманий результат збігається з формулою для навантаженого (n-1)-кратного резерву. Однак у даному випадку необхідна надійність забезпечується не додатковим включенням резервних елементів (систем), а за рахунок виділення додатково часу на виконання роботи однією системою без структурної надмірності. Середній час, що витрачається на виконання роботи обсягом V на заданому проміжку часу t визначається, як математичне сподівання випадкового часу виконання роботи tр: Тt, V = V{[1 -(1 -p)n(1+np)]/p}
Розрахунок надійності ТС з часовим резервуванням ti V 2 V …. . n. V Pi p (1 -p)p …. . (1 -p)(n-1)p де ti - можливі значення часу виконання роботи (i=1, 2, . . . , n); Pi − ймовірність виконання роботи за час ti ; Р=Р(V) - ймовірність безвідмовної роботи ТС протягом проміжку часу V. Оскільки робота може бути виконана за час V, або за час 2 V і т. д. , причому події tр = ti (tр - випадковий час виконання роботи) є подіями несумісними, то, за теоремою додавання ймовірностей, отримаємо: Р(t, V)= p + (1 -p)p +. . . +(1 -p)(n-1)p Скориставшись формулою для суми геометричної прогресії, остаточно: Р(t, V)= 1 - (1 -p)n Тут слід підкреслити, що отриманий результат збігається з формулою для навантаженого (n-1)-кратного резерву. Однак у даному випадку необхідна надійність забезпечується не додатковим включенням резервних елементів (систем), а за рахунок виділення додатково часу на виконання роботи однією системою без структурної надмірності. Середній час, що витрачається на виконання роботи обсягом V на заданому проміжку часу t визначається, як математичне сподівання випадкового часу виконання роботи tр: Тt, V = V{[1 -(1 -p)n(1+np)]/p}