

3 Оптимизация нелинейных систем.ppt
- Количество слайдов: 16
 Оптимизация нелинейных систем
Оптимизация нелинейных систем
 Если в математической модели оптимизационной задачи имеются нелинейные зависимости, для решения этой задачи используются методы нелинейного программирования.
Если в математической модели оптимизационной задачи имеются нелинейные зависимости, для решения этой задачи используются методы нелинейного программирования.
 Градиентные методы Метод покоординатного Метод скорейшего Метод с спуска постоянным шагом спуска
Градиентные методы Метод покоординатного Метод скорейшего Метод с спуска постоянным шагом спуска
 Градиентные методы Метод покоординатного Метод скорейшего Метод с спуска постоянным шагом спуска 1. Исходное (нулевое) приближение x 10, x 20. 2. Z 0 = Z(x 10, x 20). 3. grad Z(x 10, x 20) 4. Определение 4. Шаг длиной λ в 4. Определение большей по модулю частной оптимальной длины шага направлении −grad производной ∂Z/∂xi → λопт, например, 0, x 0) → точка Z(x 1 2 изменение xi на λ до тех пор, параболической пока Z не начнет аппроксимацией → шаг (x 11, x 21) увеличиваться → изменение длиной λопт в направлении … другой координаты → точка −grad Z(x 10, x 20) → точка (x 11, x 21) …
Градиентные методы Метод покоординатного Метод скорейшего Метод с спуска постоянным шагом спуска 1. Исходное (нулевое) приближение x 10, x 20. 2. Z 0 = Z(x 10, x 20). 3. grad Z(x 10, x 20) 4. Определение 4. Шаг длиной λ в 4. Определение большей по модулю частной оптимальной длины шага направлении −grad производной ∂Z/∂xi → λопт, например, 0, x 0) → точка Z(x 1 2 изменение xi на λ до тех пор, параболической пока Z не начнет аппроксимацией → шаг (x 11, x 21) увеличиваться → изменение длиной λопт в направлении … другой координаты → точка −grad Z(x 10, x 20) → точка (x 11, x 21) …
 В результате вычислительного процесса последовательно осуществляется «спуск» к минимуму функции Z. Вычислительная процедура заканчивается, когда относительное изменение целевой функции на предыдущем i-м и последующем (i+1)-м шагах оказывается меньше заданной точности вычислений ε:
В результате вычислительного процесса последовательно осуществляется «спуск» к минимуму функции Z. Вычислительная процедура заканчивается, когда относительное изменение целевой функции на предыдущем i-м и последующем (i+1)-м шагах оказывается меньше заданной точности вычислений ε:
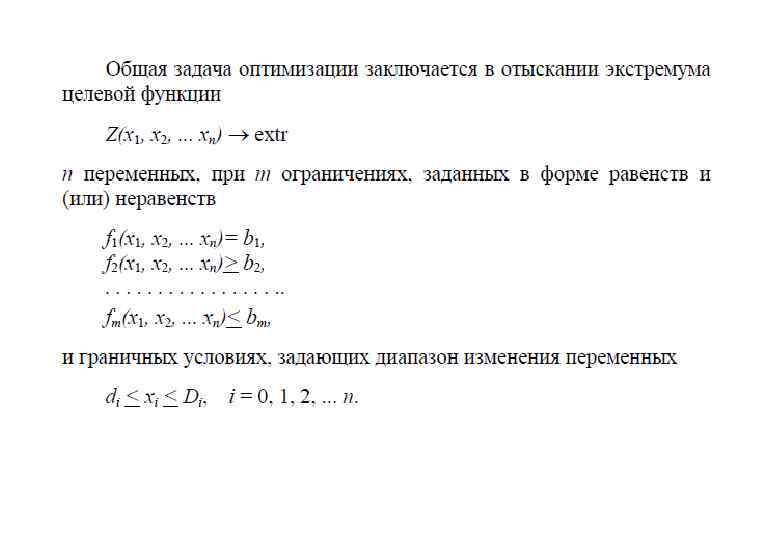
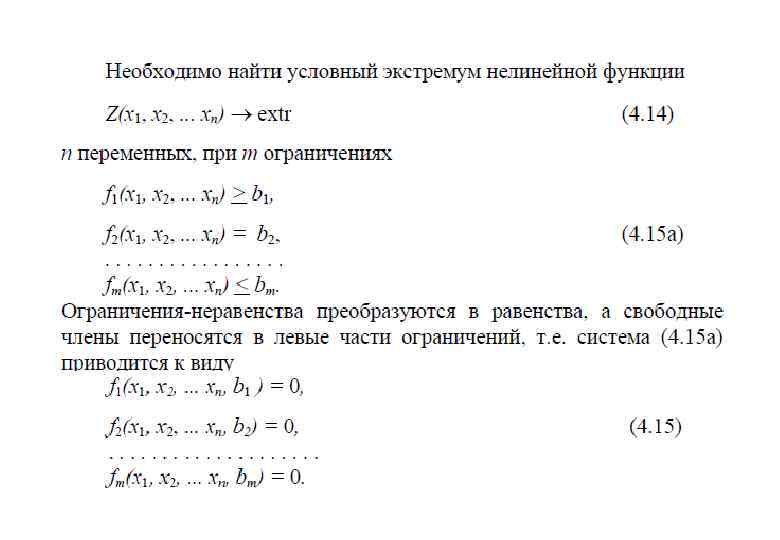
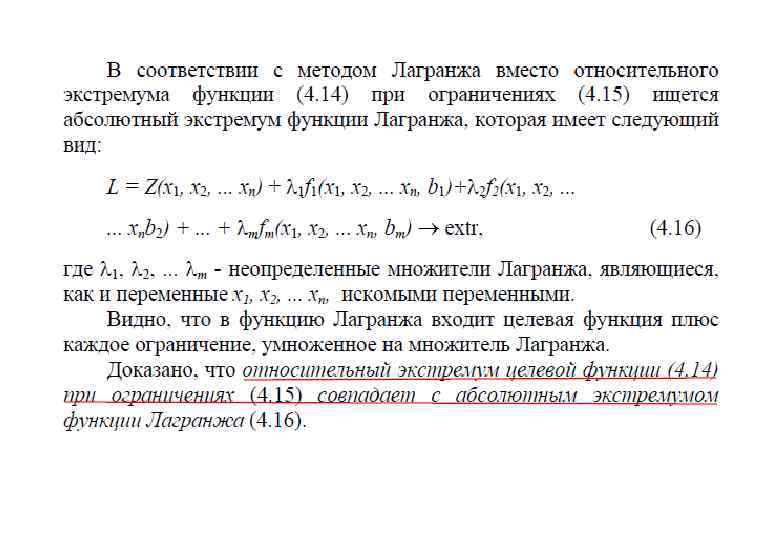
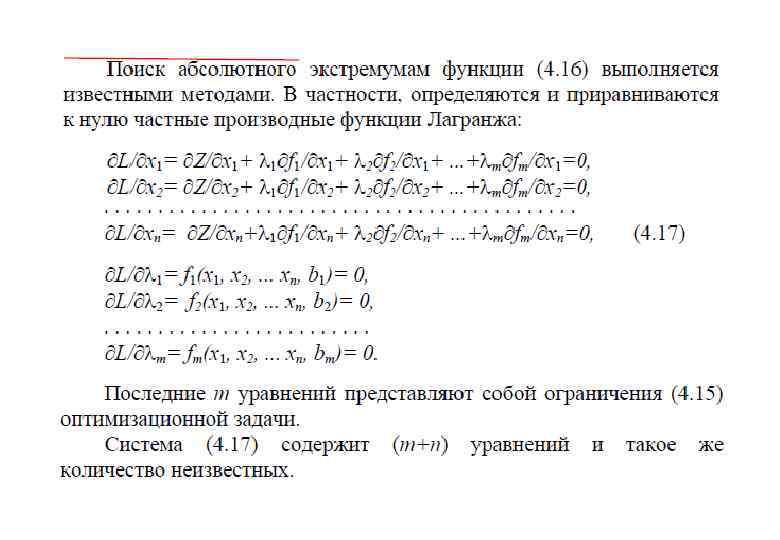
 Метод множителей Лагранжа
Метод множителей Лагранжа
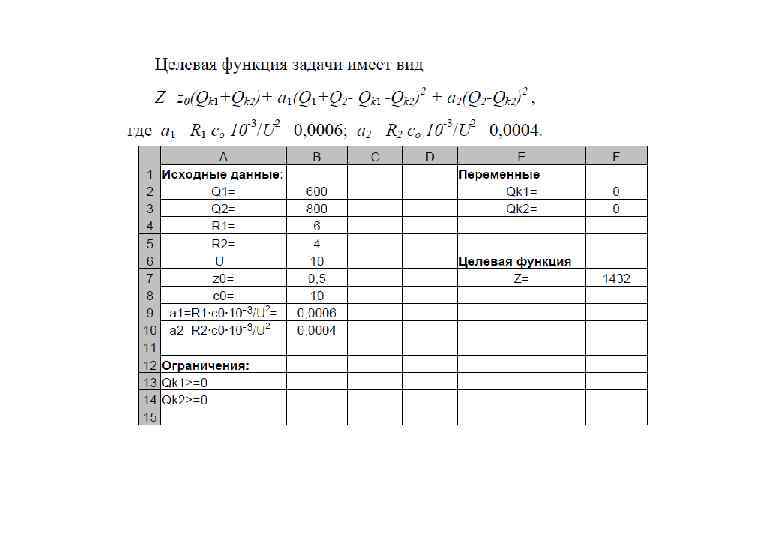
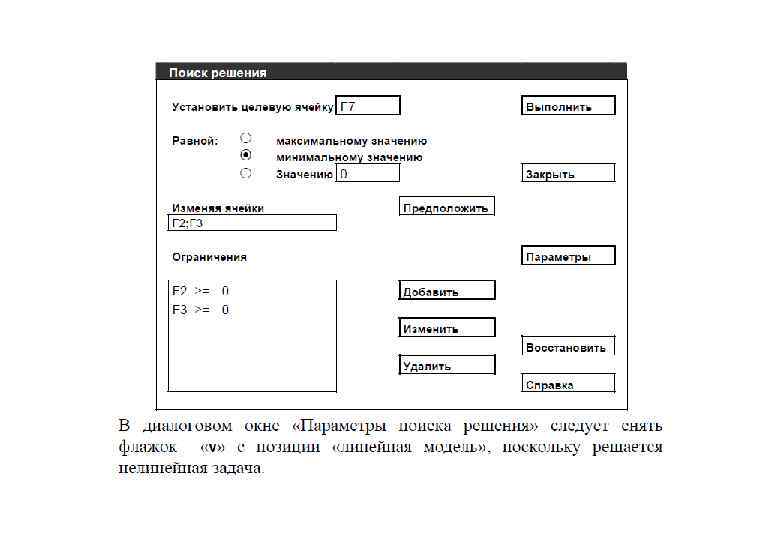
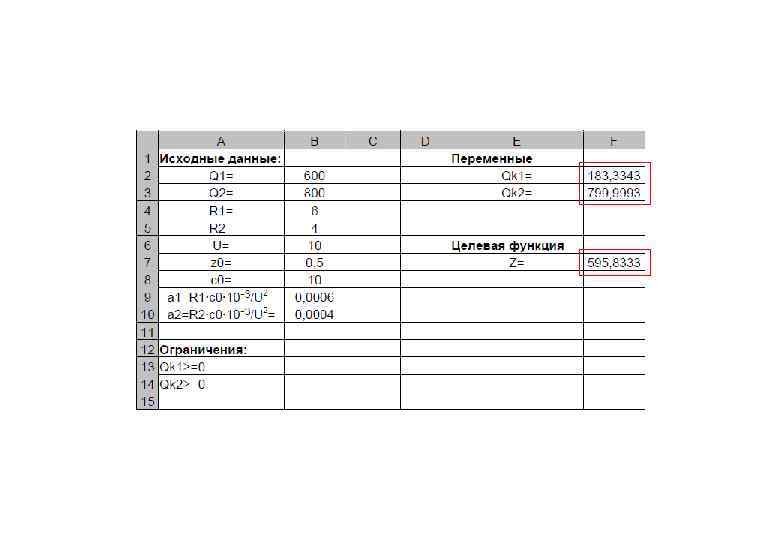
 Решение задач нелинейного программирования в EXCEL
Решение задач нелинейного программирования в EXCEL
 Спасибо за внимание!
Спасибо за внимание!