Нелинейное программирование.ppt
- Количество слайдов: 15



Нелинейное программирование
 Вид функций ограничений Число Название")
Таблица 1 Классификация задач нелинейного программирования Вид функции f(Х) Вид функций ограничений Число Название переменных задачи Нелинейная Отсутств. Одна Нелинейная Отсутств. Более одной Нелинейная Нелинейн Более ые или одной линейные Линейная Нелинейн ые Более одной Безусловная однопараметриче ская оптимизация Безусловная многопараметрич еская оптимизация Условная нелинейная оптимизация

В общем виде задача нелинейного программирования формулируется так: найти значения вектора Х , переменные xj ( j=1÷ n ), при которых f(X) = f(x 1, x 2, …, xn) max (min) при ограничениях gi(x 1, x 2, …, xn) ≤ (≥, =) ai 0, i=1÷m; где f и g - заданные функции от n переменных.

1. Область допустимых решений не обязательно является выпуклым множеством. Дана система ограничений: (x 1 – 2)2 + (x 2 – 2)2 ≤ 4 (x 1 – 3)2 + (x 2 – 3)2 ≥ 1 x 1 0; x 2 0 и целевая функция max. Z = 1, 5 x 1+1, 5 x 2.
2 + (x 2 – 2)2 =")
Заменим неравенство на равенство: (x 1 – 2)2 + (x 2 – 2)2 = 4. Данное выражение геометрически представляет собой окружность с центром в точке с координатами (2; 2) и радиусом, равным =2. Аналогично со вторым ограничением: (x 1 – 3)2 + (x 2 – 3)2 =1. Строим окружность с центром в точке (3; 3) и радиусом, равным 1.
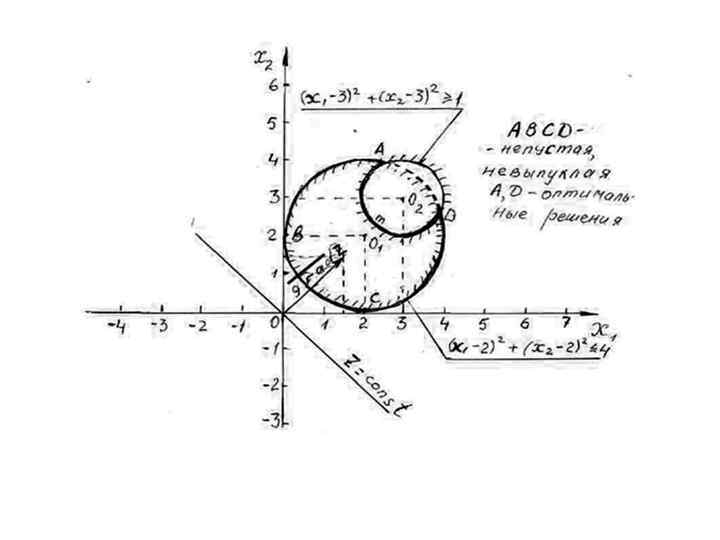

2. Область допустимых решений может иметь несколько оптимальных решений, находящихся в отличие от линейного программирования не на отрезке. Пример на рисунке 1.

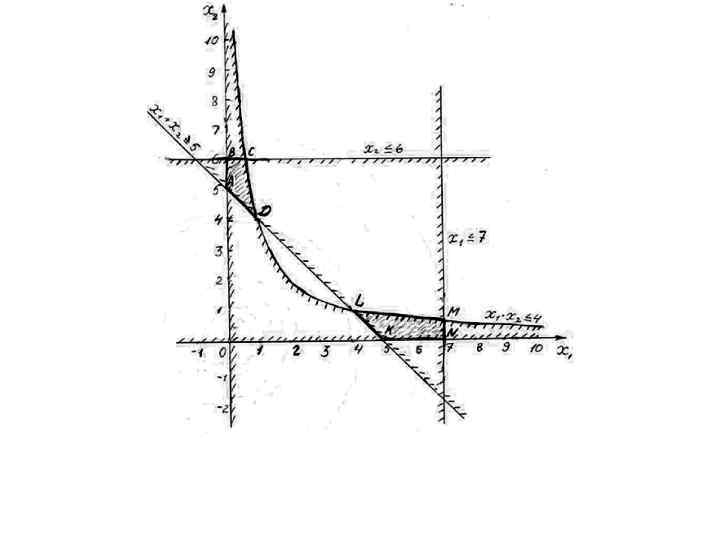
3. Область допустимых решений может состоять из нескольких частей. Пример 2. Дана система ограничений: x 1 x 2 4 x 1 + x 2 5 x 1 7 x 2 6 x 1 0, x 2 0. Найти область допустимых решений.

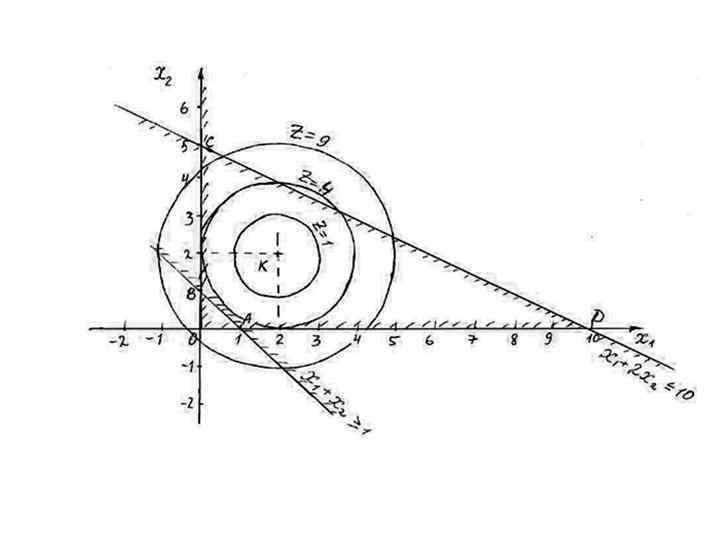
4. Точки, соответствующие оптимальному решению, могут находиться как на границе, так и внутри области допустимых решений. Пример 3. Найти min Z = (x 1 – 2)2 + (x 2 – 2)2 x 1 + 2 x 2 10 x 1 + x 2 1 x 1 0, x 2 0

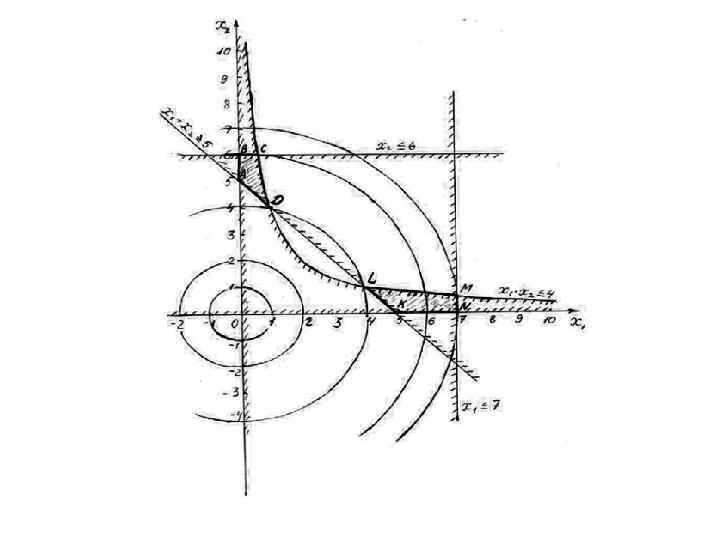
5. Целевая функция может иметь несколько локальных экстремумов, из которых затем находят точку глобального оптимума. Пример. max Z = x 12+x 22 x 1 x 2 4 x 1 + x 2 5 x 1 7 x 2 6 x 1 0, x 2 0
. Максимальное значение функция достигает в точках С и М соответственно в")
. ; 6). Максимальное значение функция достигает в точках С и М соответственно в частях ОДР АВСD и KLMN. В них имеем локальный максимум. С (2/3; 6) М=(7; 4/7)

, Сравнивая значения Z в точках С и М делаем вывод, что максимальное значение целевой функции достигается в точке М max Z = Это глобальный максимум.
Нелинейное программирование.ppt