

05 Моделирование СЭ.ppt
- Количество слайдов: 24
 Моделирование систем энергетики ПРОЕКТИРОВАНИЕ И НАСТРОЙКА РЕГУЛЯТОРОВ САУ С ИСПОЛЬЗОВАНИЕМ МОДЕЛЕЙ САУ
Моделирование систем энергетики ПРОЕКТИРОВАНИЕ И НАСТРОЙКА РЕГУЛЯТОРОВ САУ С ИСПОЛЬЗОВАНИЕМ МОДЕЛЕЙ САУ
 Цель проектирования моделей САУ Основная цель проектирования моделей - определение реальных характеристик регуляторов систем САУ в процессе настройки. Этап 1. Определение разгонных характеристик объекта управления. Объект, подлежащий автоматизации, при натурных испытаниях подвергают воздействию единичным сигналом на входе линии регулирования или линии воздействия возмущающего фактора (которую можно заменить с целью имитации линией воздействия). Существует ряд строго оговоренных условий на проведение эксперимента: 1. Технологический процесс отлажен в «ручном» режиме. 2. Имеется необходимое дублирование основных измерительных приборов. 3. Перед нанесением возмущения регулируемая величина должна быть стабилизирована в течении времени в несколько раз превышающем ожидаемую постоянную времени объекта [Т]. 4. При наличии других входных воздействий следует обеспечить их стабилизацию на время эксперимента. 5. Для снятия регулируемой характеристики использовать самописец с повышенной скоростью регистрации.
Цель проектирования моделей САУ Основная цель проектирования моделей - определение реальных характеристик регуляторов систем САУ в процессе настройки. Этап 1. Определение разгонных характеристик объекта управления. Объект, подлежащий автоматизации, при натурных испытаниях подвергают воздействию единичным сигналом на входе линии регулирования или линии воздействия возмущающего фактора (которую можно заменить с целью имитации линией воздействия). Существует ряд строго оговоренных условий на проведение эксперимента: 1. Технологический процесс отлажен в «ручном» режиме. 2. Имеется необходимое дублирование основных измерительных приборов. 3. Перед нанесением возмущения регулируемая величина должна быть стабилизирована в течении времени в несколько раз превышающем ожидаемую постоянную времени объекта [Т]. 4. При наличии других входных воздействий следует обеспечить их стабилизацию на время эксперимента. 5. Для снятия регулируемой характеристики использовать самописец с повышенной скоростью регистрации.
 6. Для многорежимного объекта или при наличии широкого диапазона нагрузок проводят три эксперимента: при средней, оптимальной и максимальной нагрузке. 7. Эксперимент проводят несколько раз (обычно по 3 раза на каждой нагрузке) и строят усредненные разгонные характеристики. 8. Временные характеристики снимаются в предположении, что исследуемые объекты являются линейными, т. е. что их разгонные характеристики не зависят от размера возмущения. 9. В тех случаях, когда выбранные значения ступенчатых воздействий приводят (или могут привести) к превышению допустимых отклонений, снимают импульсную характеристику. При выборе амплитуды и длительности импульсного воздействия следует исходить из того, чтобы регулируемая величина на участке подъема имела четко выраженную точку перегиба или участок постоянного наклона. 10. Возмущающие воздействия на объект наносятся, как правило, с помощью регулирующих или запорных органов, снабженных дистанционным управлением с сервоприводом (МЭО – механизм электрический однооборотный), имеющим постоянную скорость перемещения регулирующего органа. В этих случаях следует учитывать не мгновенный характер скачка возмущения, особенно когда время перестановки регулирующего органа соизмеримо с постоянной времени объекта Т. 11. Если после снятия возмущения регулируемая величина не возвращается к своему начальному значению – опыт следует повторить.
6. Для многорежимного объекта или при наличии широкого диапазона нагрузок проводят три эксперимента: при средней, оптимальной и максимальной нагрузке. 7. Эксперимент проводят несколько раз (обычно по 3 раза на каждой нагрузке) и строят усредненные разгонные характеристики. 8. Временные характеристики снимаются в предположении, что исследуемые объекты являются линейными, т. е. что их разгонные характеристики не зависят от размера возмущения. 9. В тех случаях, когда выбранные значения ступенчатых воздействий приводят (или могут привести) к превышению допустимых отклонений, снимают импульсную характеристику. При выборе амплитуды и длительности импульсного воздействия следует исходить из того, чтобы регулируемая величина на участке подъема имела четко выраженную точку перегиба или участок постоянного наклона. 10. Возмущающие воздействия на объект наносятся, как правило, с помощью регулирующих или запорных органов, снабженных дистанционным управлением с сервоприводом (МЭО – механизм электрический однооборотный), имеющим постоянную скорость перемещения регулирующего органа. В этих случаях следует учитывать не мгновенный характер скачка возмущения, особенно когда время перестановки регулирующего органа соизмеримо с постоянной времени объекта Т. 11. Если после снятия возмущения регулируемая величина не возвращается к своему начальному значению – опыт следует повторить.
 t t 0 b x(t) 0 x t") Объект без самовыравнивания. y(t) t t 0 b x(t) 0 x t
Объект без самовыравнивания. y(t) t t 0 b x(t) 0 x t
 t yуст t 0 b x(t) 0 x t") Объект c самовыравниванием. T y(t) t yуст t 0 b x(t) 0 x t
Объект c самовыравниванием. T y(t) t yуст t 0 b x(t) 0 x t
 Синтез систем автоматического управления Как уже было рассмотрено в предыдущих разделах, синтез САУ это процесс технического проектирования, целью которого является определение параметров и структуры САУ, которые обеспечивали бы желаемые показатели качества. Поскольку характеристики объекта управления, и, как следствие, вид и постоянные его передаточной функции в процессе проектирования САУ изменить невозможно, задачи обеспечения требуемых показателей качества решаются выбором элементов и структуры САУ, а также синтезом регулятора при его моделировании. Для обеспечения качества регулирования регулятор САУ должен обеспечивать определенные динамические соотношения между входным воздействием и выходной величиной, обеспечивая ее постоянство. Эти соотношения называются законами автоматического регулирования. Закон автоматического регулирования это дифференциальное уравнение (передаточная функция) регулятора, выражающее управляющее воздействие через входную величину. В современных АСУ ТП функции регулятора реализуются прикладной программой на уровне контроллера. Один промышленный контроллер может реализовывать до тысячи регуляторов. Наряду с этим, локальные аппаратные регуляторы широко используются там, где не требуется столь мощного функционала.
Синтез систем автоматического управления Как уже было рассмотрено в предыдущих разделах, синтез САУ это процесс технического проектирования, целью которого является определение параметров и структуры САУ, которые обеспечивали бы желаемые показатели качества. Поскольку характеристики объекта управления, и, как следствие, вид и постоянные его передаточной функции в процессе проектирования САУ изменить невозможно, задачи обеспечения требуемых показателей качества решаются выбором элементов и структуры САУ, а также синтезом регулятора при его моделировании. Для обеспечения качества регулирования регулятор САУ должен обеспечивать определенные динамические соотношения между входным воздействием и выходной величиной, обеспечивая ее постоянство. Эти соотношения называются законами автоматического регулирования. Закон автоматического регулирования это дифференциальное уравнение (передаточная функция) регулятора, выражающее управляющее воздействие через входную величину. В современных АСУ ТП функции регулятора реализуются прикладной программой на уровне контроллера. Один промышленный контроллер может реализовывать до тысячи регуляторов. Наряду с этим, локальные аппаратные регуляторы широко используются там, где не требуется столь мощного функционала.
 Типовые законы автоматического управления Рассмотрим типовые законы регулирования на примере регуляторов САУ, реализованной по принципу обратной связи: в этом случае входной величиной регулятора является рассогласование ε(t). Статическое регулирование Релейное (позиционное) управление [P] Пропорциональный закон управления [П] Динамическое регулирование Дифференциальный закон управления [Д] Интегральный закон регулирования [И] Совмещенные законы регулирования [ПД], [ПИД], [ПИДД], и т. д.
Типовые законы автоматического управления Рассмотрим типовые законы регулирования на примере регуляторов САУ, реализованной по принципу обратной связи: в этом случае входной величиной регулятора является рассогласование ε(t). Статическое регулирование Релейное (позиционное) управление [P] Пропорциональный закон управления [П] Динамическое регулирование Дифференциальный закон управления [Д] Интегральный закон регулирования [И] Совмещенные законы регулирования [ПД], [ПИД], [ПИДД], и т. д.
 Заданный алгоритм функционирования x(t) Р УУ z(t) ОУ y(t)") Входная величина регулятора ЗАФ x(t) Заданный алгоритм функционирования x(t) Р УУ z(t) ОУ y(t) САУ с разомкнутым управлением z(t) Р f(t) ОУ y(t) УУ САУ с управлением по отклонению (принцип отрицательной обратной связи)
Входная величина регулятора ЗАФ x(t) Заданный алгоритм функционирования x(t) Р УУ z(t) ОУ y(t) САУ с разомкнутым управлением z(t) Р f(t) ОУ y(t) УУ САУ с управлением по отклонению (принцип отрицательной обратной связи)
=kр (t), где kр – коэффициент статического") Пропорциональный закон регулирования для САУ по отклонению z(t)=kр (t), где kр – коэффициент статического преобразования регулятора Wp(p)=kр П-регулятор
Пропорциональный закон регулирования для САУ по отклонению z(t)=kр (t), где kр – коэффициент статического преобразования регулятора Wp(p)=kр П-регулятор
 Статическая характеристика П-регулятор давления s 100 % s 2 Р s 0 4 3 0% 1 0% P P 0 100 % Б 2 А О клапан закрыт клапан полностью открыт 1 s
Статическая характеристика П-регулятор давления s 100 % s 2 Р s 0 4 3 0% 1 0% P P 0 100 % Б 2 А О клапан закрыт клапан полностью открыт 1 s
 Пропорционально-дифференциальный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Тд – постоянная времени дифференцирования Wp(p)=kр(1+Tдp)= kр+ kдp ПД-регулятор
Пропорционально-дифференциальный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Тд – постоянная времени дифференцирования Wp(p)=kр(1+Tдp)= kр+ kдp ПД-регулятор
 ПРИМЕРЫ реализации САУ давления П- и ПД-типа ПД-регулятор П-регулятор 2 вентиль 1
ПРИМЕРЫ реализации САУ давления П- и ПД-типа ПД-регулятор П-регулятор 2 вентиль 1
 Р 1 Р 0 t t 0 П-регулятор") Переходные процессы П- и ПД-регуляторов Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПД-регулятор s(t) s 1 s 0 t t 0
Переходные процессы П- и ПД-регуляторов Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПД-регулятор s(t) s 1 s 0 t t 0
 Пропорционально-интегральный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Ти – постоянная времени интегрирования Wp(p)=kр(1+1/Tиp)= kр+ kи /p ПИ-регулятор
Пропорционально-интегральный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Ти – постоянная времени интегрирования Wp(p)=kр(1+1/Tиp)= kр+ kи /p ПИ-регулятор
 ПРИМЕРЫ реализации САУ давления П- и ПИ-типа П-регулятор отверстие в поршне ПИ-регулятор
ПРИМЕРЫ реализации САУ давления П- и ПИ-типа П-регулятор отверстие в поршне ПИ-регулятор
 Р 1 Р 0 t t 0 П-регулятор") Переходные процессы П- и ПИ-регулятора Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПИ-регулятор s(t) s 1 s 0 t t 0
Переходные процессы П- и ПИ-регулятора Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПИ-регулятор s(t) s 1 s 0 t t 0
 Пропорционально-дифференциальноинтегральный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Ти – постоянная времени интегрирования Тд – постоянная времени дифференцирования ПИД-регулятор
Пропорционально-дифференциальноинтегральный закон регулирования для САУ по отклонению где kр – коэффициент статического преобразования регулятора Ти – постоянная времени интегрирования Тд – постоянная времени дифференцирования ПИД-регулятор
 отверстие в поршне вентиль ПРИМЕР реализации САУ давления ПИД-типа
отверстие в поршне вентиль ПРИМЕР реализации САУ давления ПИД-типа
 Р 1 Р 0 t t 0 П-регулятор") Переходные процессы П- и ПИД-регулятора Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПИД-регулятор s(t) s 1 s 0 t t 0
Переходные процессы П- и ПИД-регулятора Pвх(t) Р 1 Р 0 t t 0 П-регулятор s(t) ПИД-регулятор s(t) s 1 s 0 t t 0
 Этап 2. Определение параметров регулятора. Основные настройки регулятора АСР, включенного в отрицательную обратную связь объекта регулирования, приведены в таблице. Wp(p) х(t) Регулятор АСР Объект управления y(t)
Этап 2. Определение параметров регулятора. Основные настройки регулятора АСР, включенного в отрицательную обратную связь объекта регулирования, приведены в таблице. Wp(p) х(t) Регулятор АСР Объект управления y(t)
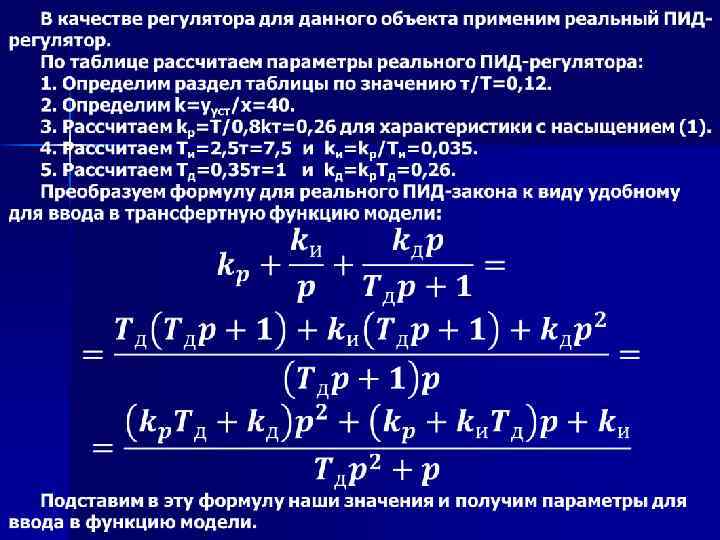
 Пример расчета параметров регулятора и проверка его функционирования на модели САУ Рассмотрим разгонную характеристику объекта, показанную на рисунке и определим его исходные характеристики. х=1, τ=3 с, b=2, T=25 c, yуст=40.
Пример расчета параметров регулятора и проверка его функционирования на модели САУ Рассмотрим разгонную характеристику объекта, показанную на рисунке и определим его исходные характеристики. х=1, τ=3 с, b=2, T=25 c, yуст=40.
 Параметры переходного процесса, реализуемые регулятором АСР вполне приемлемые для внедрения на реальном объекте.
Параметры переходного процесса, реализуемые регулятором АСР вполне приемлемые для внедрения на реальном объекте.
 То же, но при подаче на вход объекта сигнала в 10 раз больше модельного. Следует отметить, что теперь возможно эмпирическое уточнение параметров регулятора с целью дальнейшего улучшения качества переходного процесса.
То же, но при подаче на вход объекта сигнала в 10 раз больше модельного. Следует отметить, что теперь возможно эмпирическое уточнение параметров регулятора с целью дальнейшего улучшения качества переходного процесса.