

Лк 9_Ад.ppt
- Количество слайдов: 35
 Моделирование нагрузки в расчетах электромеханических переходных процессов
Моделирование нагрузки в расчетах электромеханических переходных процессов
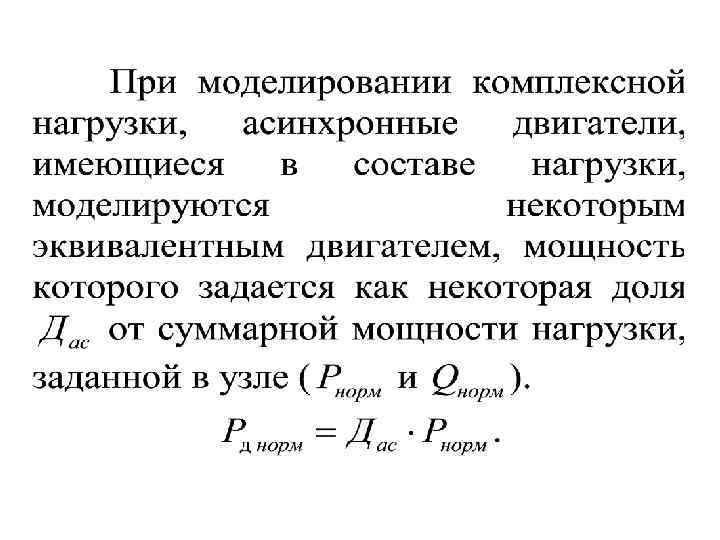
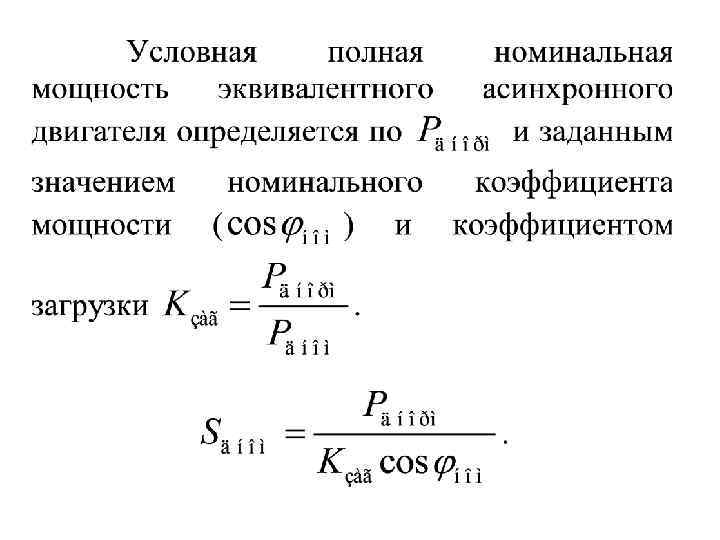
 Способы моделирования комплексной нагрузки
Способы моделирования комплексной нагрузки
 Нагрузка электрической системы представляет собой совокупность многочисленных потребителей электроэнергии, обладающих различными статическими и динамическими характеристиками и питающихся от узловых точек энергосистемы. Эти узлы комплексных нагрузок обычно обладают большой мощностью, и процессы в них оказывают существенное влияние на систему.
Нагрузка электрической системы представляет собой совокупность многочисленных потребителей электроэнергии, обладающих различными статическими и динамическими характеристиками и питающихся от узловых точек энергосистемы. Эти узлы комплексных нагрузок обычно обладают большой мощностью, и процессы в них оказывают существенное влияние на систему.
 При расчетах динамической устойчивости используют следующие способы моделирования нагрузки: 1. Постоянной мощностью S = const; 2. Постоянным сопротивлением Z = const; 3. Статическими характеристиками; 4. Динамическими характеристиками.
При расчетах динамической устойчивости используют следующие способы моделирования нагрузки: 1. Постоянной мощностью S = const; 2. Постоянным сопротивлением Z = const; 3. Статическими характеристиками; 4. Динамическими характеристиками.
 Математическая модель узлов комплексной нагрузки должна воспроизводить процессы торможения и самозапуска двигательной нагрузки при снижениях и восстановлениях напряжения с учетом моментноскоростных характеристик асинхронных и синхронных электродвигателей в широком диапазоне изменения частоты вращения агрегатов двигательмеханизм.
Математическая модель узлов комплексной нагрузки должна воспроизводить процессы торможения и самозапуска двигательной нагрузки при снижениях и восстановлениях напряжения с учетом моментноскоростных характеристик асинхронных и синхронных электродвигателей в широком диапазоне изменения частоты вращения агрегатов двигательмеханизм.
 Кроме того, модель нагрузки должна учитывать обмен кинетической энергией, запасенной во вращающихся массах, между генераторами сети и нагрузкой при сильных возмущениях режима. Поэтому комплексная нагрузка представляется совокупностью статической нагрузки, потребление которой определяется СХН и регулирующим эффектом по частоте, и динамической нагрузки, имеющей асинхронную и синхронную составляющие.
Кроме того, модель нагрузки должна учитывать обмен кинетической энергией, запасенной во вращающихся массах, между генераторами сети и нагрузкой при сильных возмущениях режима. Поэтому комплексная нагрузка представляется совокупностью статической нагрузки, потребление которой определяется СХН и регулирующим эффектом по частоте, и динамической нагрузки, имеющей асинхронную и синхронную составляющие.
 Моделирование асинхронных двигателей
Моделирование асинхронных двигателей
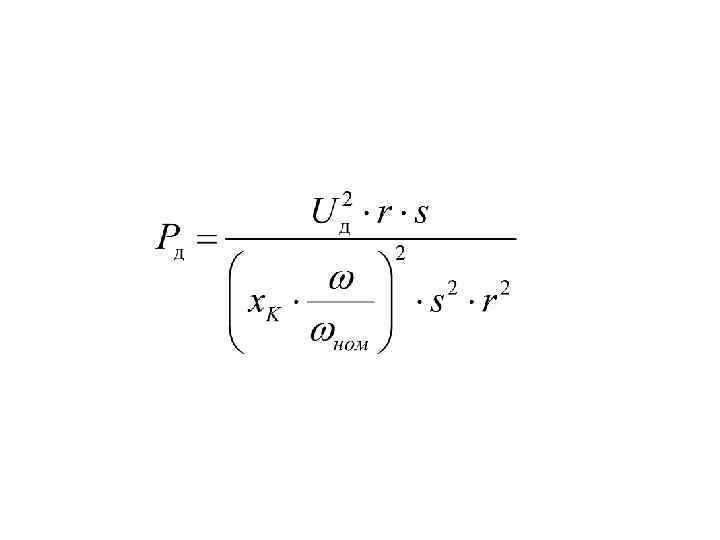
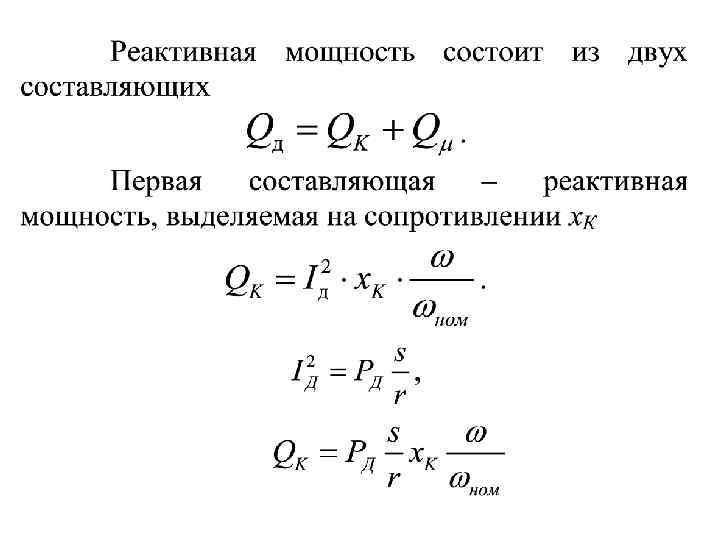
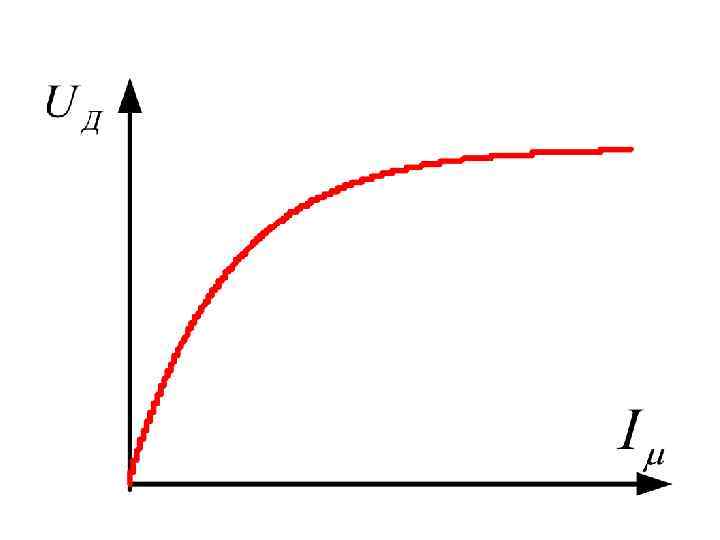
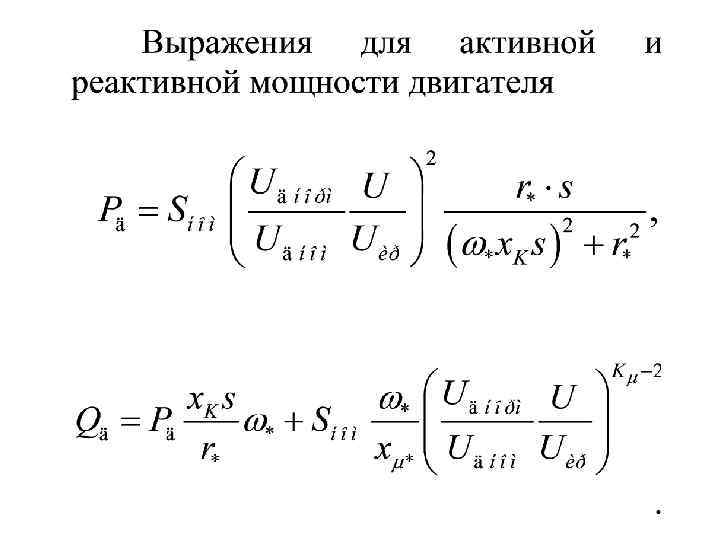
 • Модель асинхронного двигателя может быть реализована в двух видах: с учетом и без учета электромагнитных переходных процессов. • В первом случае уравнения близки к тем, которыми описывается генератор: в каждой оси ротора двигателя учитывается по одному или по два демпферных контура. В этой модели активная и реактивная мощности двигателя зависят от напряжения, скольжения двигателя и от производной скольжения, т. е. от ускорения. • Модели второго вида содержат упрощенные уравнения, в которых активная и реактивная мощности зависят от напряжения и скольжения.
• Модель асинхронного двигателя может быть реализована в двух видах: с учетом и без учета электромагнитных переходных процессов. • В первом случае уравнения близки к тем, которыми описывается генератор: в каждой оси ротора двигателя учитывается по одному или по два демпферных контура. В этой модели активная и реактивная мощности двигателя зависят от напряжения, скольжения двигателя и от производной скольжения, т. е. от ускорения. • Модели второго вида содержат упрощенные уравнения, в которых активная и реактивная мощности зависят от напряжения и скольжения.
 • Модели второго вида содержат упрощенные уравнения, в которых активная и реактивная мощности зависят от напряжения и скольжения. • Разница между этими моделями проявляется только при наличии значительных ускорений, главным образом в конце самозапуска, когда вращающий момент двигателя превышает номинальное значение примерно вдвое. Эти различия не являются решающими и мало влияют на точность расчетов. Поэтому в программах расчета электромеханических переходных процессов широко используется модель без учета электромагнитных переходных процессов в контурах ротора.
• Модели второго вида содержат упрощенные уравнения, в которых активная и реактивная мощности зависят от напряжения и скольжения. • Разница между этими моделями проявляется только при наличии значительных ускорений, главным образом в конце самозапуска, когда вращающий момент двигателя превышает номинальное значение примерно вдвое. Эти различия не являются решающими и мало влияют на точность расчетов. Поэтому в программах расчета электромеханических переходных процессов широко используется модель без учета электромагнитных переходных процессов в контурах ротора.


 Упрощенная схема замещения двигателя
Упрощенная схема замещения двигателя


 Уравнение момента механизма
Уравнение момента механизма
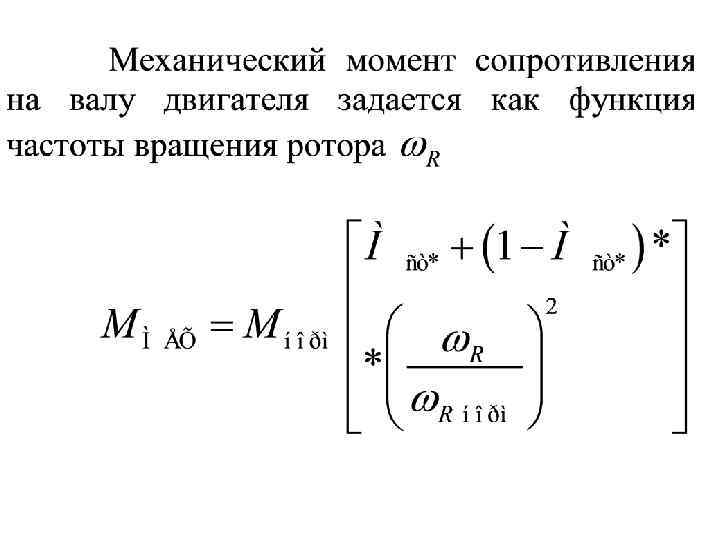
 В уравнение движения агрегата двигатель-механизм входит момент механизма, зависящий от частоты вращения. Статические и динамические моментные характеристики насосов, вентиляторов, центробежных компрессоров и других механизмов различаются незначительно, поэтому в расчетах электромеханических переходных процессов в энергосистемах и узлах нагрузки механизмы обычно описывают алгебраическими уравнениями.
В уравнение движения агрегата двигатель-механизм входит момент механизма, зависящий от частоты вращения. Статические и динамические моментные характеристики насосов, вентиляторов, центробежных компрессоров и других механизмов различаются незначительно, поэтому в расчетах электромеханических переходных процессов в энергосистемах и узлах нагрузки механизмы обычно описывают алгебраическими уравнениями.
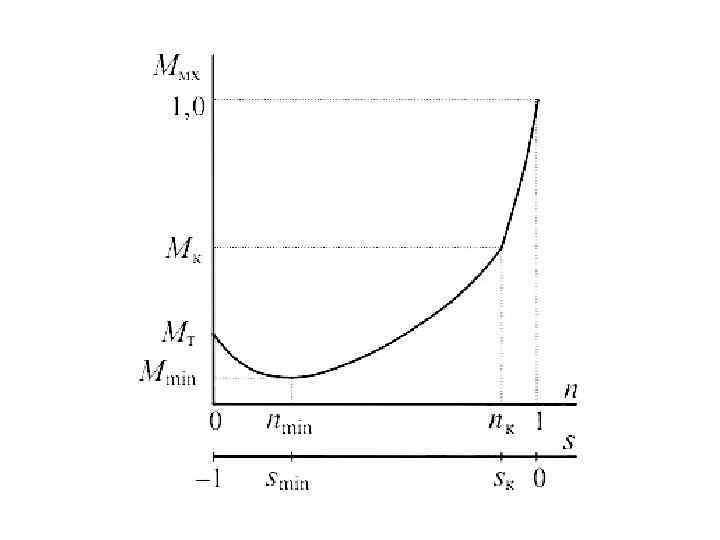
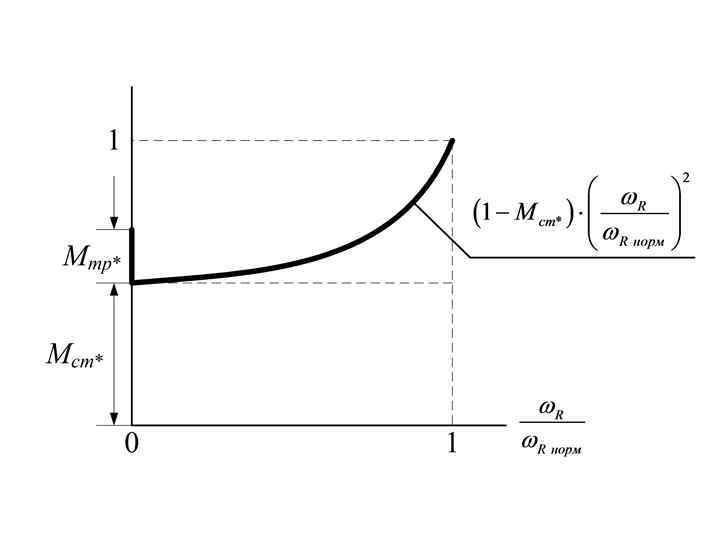
 Момент механизма имеет две составляющие: момент сил трения и полезный момент. Чтобы осуществить пуск агрегата, необходимо преодолеть момент трогания Мт, обусловленный силами трения покоя в подшипниках и уплотнениях. По мере разгона механизма момент сил трения уменьшается и при достижении некоторой частоты вращения становится постоянным, а полезный момент с ростом частоты вращения увеличивается.
Момент механизма имеет две составляющие: момент сил трения и полезный момент. Чтобы осуществить пуск агрегата, необходимо преодолеть момент трогания Мт, обусловленный силами трения покоя в подшипниках и уплотнениях. По мере разгона механизма момент сил трения уменьшается и при достижении некоторой частоты вращения становится постоянным, а полезный момент с ростом частоты вращения увеличивается.
 Поэтому моментная характеристика обычно имеет падающий участок от момента трогания Мт до некоторого минимального момента Mmin при минимальной частоте вращения, поскольку скорость уменьшения момента сил трения выше, чем скорость нарастания полезного момента. Восходящий участок может быть непрерывным или иметь точку перегиба, в которой изменяется зависимость момента от частоты вращения.
Поэтому моментная характеристика обычно имеет падающий участок от момента трогания Мт до некоторого минимального момента Mmin при минимальной частоте вращения, поскольку скорость уменьшения момента сил трения выше, чем скорость нарастания полезного момента. Восходящий участок может быть непрерывным или иметь точку перегиба, в которой изменяется зависимость момента от частоты вращения.
 Моделирование синхронных двигателей
Моделирование синхронных двигателей
 Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Jсновой математической модели синхронного двигателя является модель синхронного генератора. Необходимые для моделирования данные: сопротивления, постоянные времени, момент инерции, активная мощность вводятся в генераторные таблицы. В качестве логического признака, позволяющего программе отличить двигатель от генератора, активная мощность синхронного двигателя вводится со знаком «–» .
Конструкция синхронного двигателя принципиально не отличается от конструкции синхронного генератора. Jсновой математической модели синхронного двигателя является модель синхронного генератора. Необходимые для моделирования данные: сопротивления, постоянные времени, момент инерции, активная мощность вводятся в генераторные таблицы. В качестве логического признака, позволяющего программе отличить двигатель от генератора, активная мощность синхронного двигателя вводится со знаком «–» .
 Моделирование действия УРЗА
Моделирование действия УРЗА
 Модель РЗА должна обеспечить: • конструирование устройств РЗА с произвольными наборами измеряемых режимных параметров и контролируемых состояний объектов энергосистемы; • моделирование алгоритмов работы аналоговых и цифровых устройств РЗА; • взаимодействие различных устройств РЗА: • удобный и быстрый ввод данных и настройку устройств РЗА с минимальным использованием клавиатуры, • автоматизированный ввод данных для стандартных устройств автоматики, копирование и передачу устройств РЗА между схемами.
Модель РЗА должна обеспечить: • конструирование устройств РЗА с произвольными наборами измеряемых режимных параметров и контролируемых состояний объектов энергосистемы; • моделирование алгоритмов работы аналоговых и цифровых устройств РЗА; • взаимодействие различных устройств РЗА: • удобный и быстрый ввод данных и настройку устройств РЗА с минимальным использованием клавиатуры, • автоматизированный ввод данных для стандартных устройств автоматики, копирование и передачу устройств РЗА между схемами.
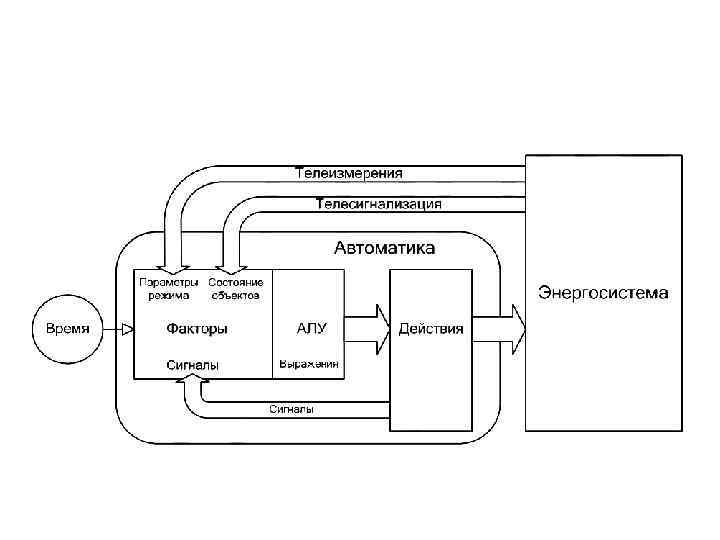
 • Автоматика - математическая модель РЗА энергосистемы, набор автоматов, связанных между собой сигналами. • Фактор - время, выдержка времени, параметр режима, состояние объекта энергосистемы, сигнал или фактор запуска. • АЛУ - алгоритмическое устройство, вычисляет алгебраические и логические выражения. • Действие - управляющее воздействие на один или несколько объектов энергосистемы или сигнал. • Сигнал - действие по изменению значения и/или состояния связанного с действиемсигналом фактора-сигнала.
• Автоматика - математическая модель РЗА энергосистемы, набор автоматов, связанных между собой сигналами. • Фактор - время, выдержка времени, параметр режима, состояние объекта энергосистемы, сигнал или фактор запуска. • АЛУ - алгоритмическое устройство, вычисляет алгебраические и логические выражения. • Действие - управляющее воздействие на один или несколько объектов энергосистемы или сигнал. • Сигнал - действие по изменению значения и/или состояния связанного с действиемсигналом фактора-сигнала.