
Министерство образования и науки Украины Главное управление образования
















man.pptx
- Размер: 69.9 Мб
- Автор:
- Количество слайдов: 59
Описание презентации Министерство образования и науки Украины Главное управление образования по слайдам
Министерство образования и науки Украины Главное управление образования и науки Днепропетровской областной администрации Днепропетровское территориальное отделение МАН Украины Обоснование параметров и разработка системы управления гусеничным транспортным средством с навесным устройством Выполнил: Бараник В. А. Руководитель: Шибка Г. И. Сирченко А. А. Днепропетровск-
Актуальная техническая проблема – при использовании навесного оборудования в машинах с гусеничным движителем, из-за смещения центра тяжести технической системы, усложняется процесс перемещения и маневрирования машины.
Объект исследования – механические процессы, протекающие в гусеничном транспортном средстве с навесным устройством при его повороте. Предмет исследования – зависимости между параметрами гусеничного транспортного средства с навесным устройством. Методы исследования – компьютерное моделирование в Solid. Works , методы физического эксперимента. Цель – разработать рекомендации на проектирования системы управления гусеничного транспортного средства с навесным устройством.
Для достижения цели поставлены следующие задачи : 1. Анализ состояние вопроса и постановка задачи. 2. Разработка компьютерной модели гусеничного транспортного средства. 3. Проведение вычислительного эксперимента и анализ полученных результатов. 4. Разработка системы управления. 5. Проведение физического эксперимента на реальной модели.
Научные положения Впервые доказано , что для увеличения угла поворота транспортного средства при схеме «плавный поворот» требуется отклонение навесного устройства к центру кривизны траектории. Эффективность поворота увеличивается при увеличении относительной массы навесного устройства. Впервые обосновано , что для схем «крутой поворот» и «поворот на месте» , оптимальный угол поворота достигается при расположении навесного устройства на продольной оси транспортного средства. Эффективность поворота увеличивается при уменьшении относительной массы навесного устройства.
Анализ состояния вопроса. Постановка задачи исследования. Машина (ТС) с гусеничным движителем разнообразны по конструкции и назначению. Используют при своей роботе навесные устройства (НУ). Платоновым В. Ф. , Антоновым А. С. и Позиным Б. М. теоретически рассмотрены работа гусеничного движителя, механизм его взаимодействия с поверхностью земли. В частности процессы возникающие при повороте ТС.
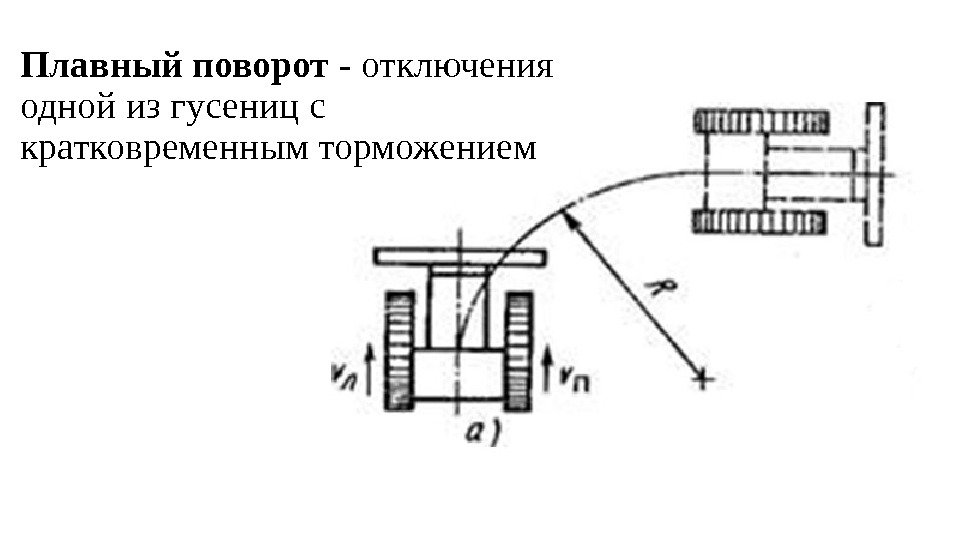
Плавный поворот — отключения одной из гусениц с кратковременным торможением
КРУТОЙ ПОВОРОТ — блокировка одной из гусениц
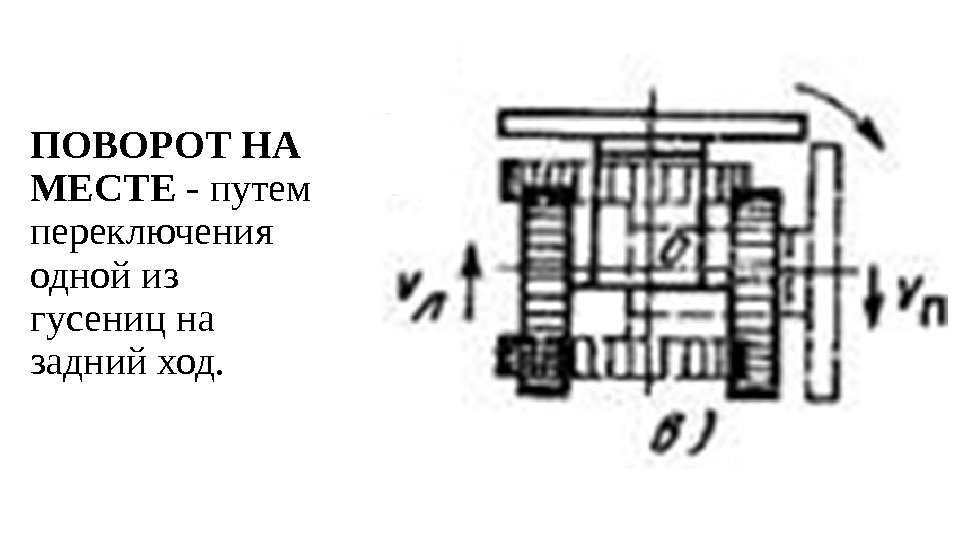
ПОВОРОТ НА МЕСТЕ — путем переключения одной из гусениц на задний ход.
В трудах ученых не выполнен анализ влияния на процессы поворота технического средства (ТС) навесных устройств (НУ). НУ за счет смещения центра тяжести конструкции усложняют процесс перемещения и маневрирования машины
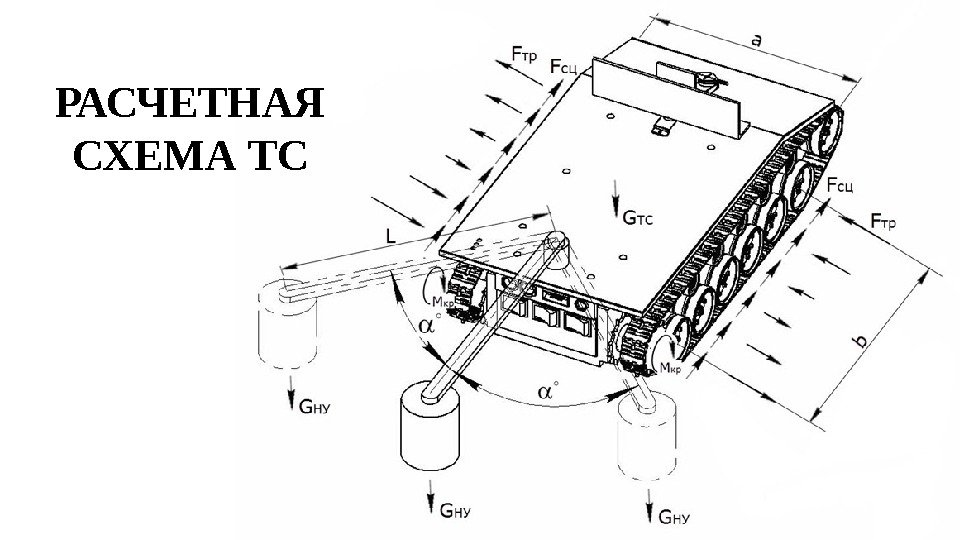
РАСЧЕТНАЯ СХЕМА ТС
Из анализа расчетной схемы следует: 1. Поворот ТС осуществляется парой сил трения F cц сцепления которые возникают при снижении скорости движения одной из гусениц. Этому повороту мешает пара сил трения F тр которые возникают при повороте. 2. Процесс поворота гусеничного движителя описывается сложными нелинейными моделями. Поэтому, для исследования механического движения необходимо применение современных CAE инструментов.
Техническая идея работы – повысить эффективность управления машины с гусеничным движителем путем поворота навесным устройством. Очевидно, что при разработке системы управления машин с гусеничным движителем и навесным устройством необходимо учитывать механические процессы, возникающие при маневре устройства.
Отсюда следует, что обоснование параметров и разработка системы управления гусеничным транспортным средством с навесным устройством на основе анализа влияния конструктивных параметров машины на угол ее поворота является актуальной научной задачей.
Разработка компьютерной модели гусеничного транспортного средства
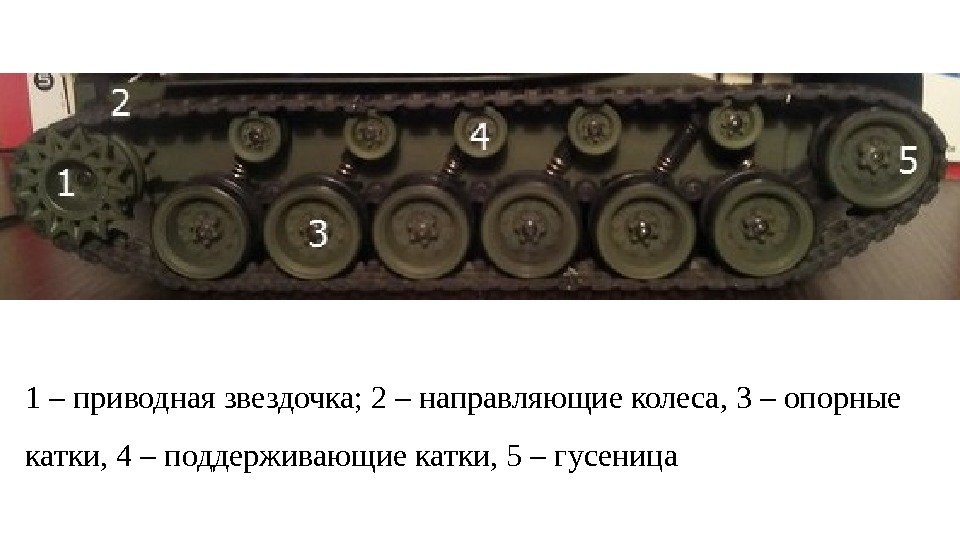
Исходный технический объект – действующая модель машины с гусеничным движителем
1 – приводная звездочка; 2 – направляющие колеса, 3 – опорные катки, 4 – поддерживающие катки, 5 – гусеница
Недостатки исходного технического объекта Система управления не позволяет эффективно реализовать режимы поворота объекта, наблюдается перегрев транзисторов на драйвере двигателей, недостаточная мощность аккумуляторов. Управление осуществляется с пульта, что не позволяло задать необходимую программу движения. Необходимо разработать свою систему управления свободную от недостатков.
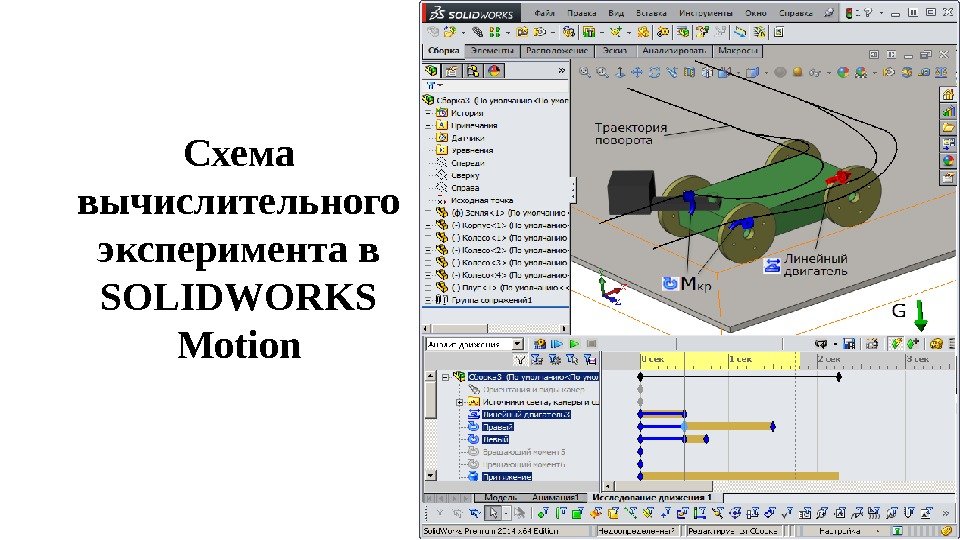
Для моделирования принято: 1. Конструкцию и размеры деталей и узлов исходного технического объекта. 2. Компьютерную модель разработать в программе Solid. Works 3. Исследования поведения ТС при поворотах выполнить в программе Solid. Works Motion — предназначен для расчета движения механизмов. Может быть использован для комплексного динамического и кинематического анализа механизмов, определения скоростей, ускорений и взаимных воздействий элементов системы.
Твердотельная компьютерная модель транспортного средства с навесным устройством
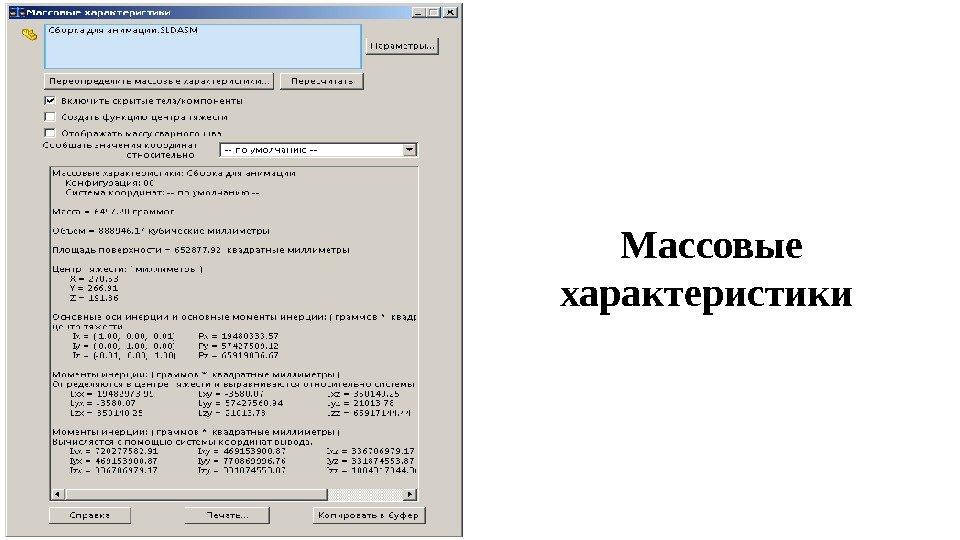
Массовые характеристики
Из анализа компьютерной модели ТС в Solid. Works следует : 1. Модель работа способна, отсутствуют конфликты деталей и узлов 2. Массовые х-ка ТС следующие: 2. 1. Масса – 6497, 20. 2. 2. Объем – 888946 квадратных мм. 2. 3. Центре тяжести задан координатами (мм) x; y; z – (270; 266; 191)
Расчетная модель транспортного средства
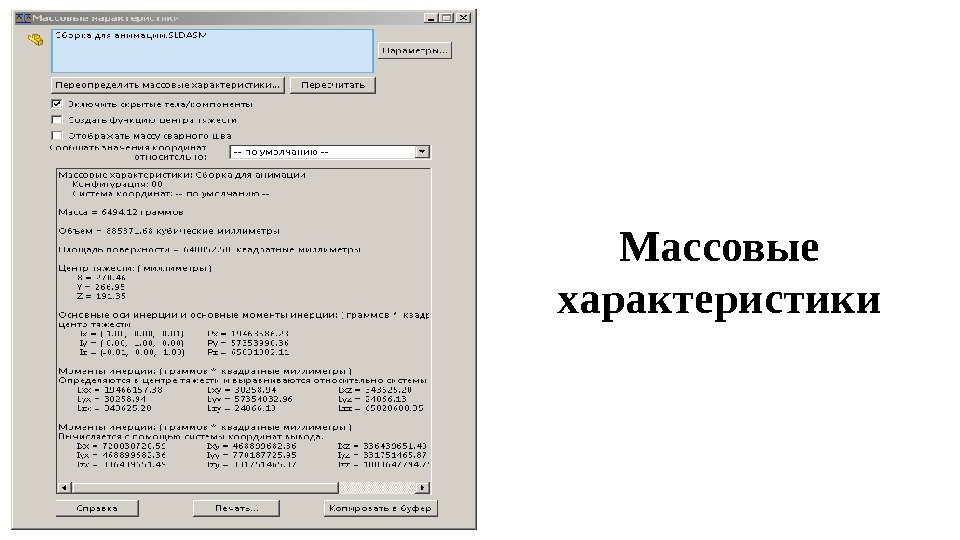
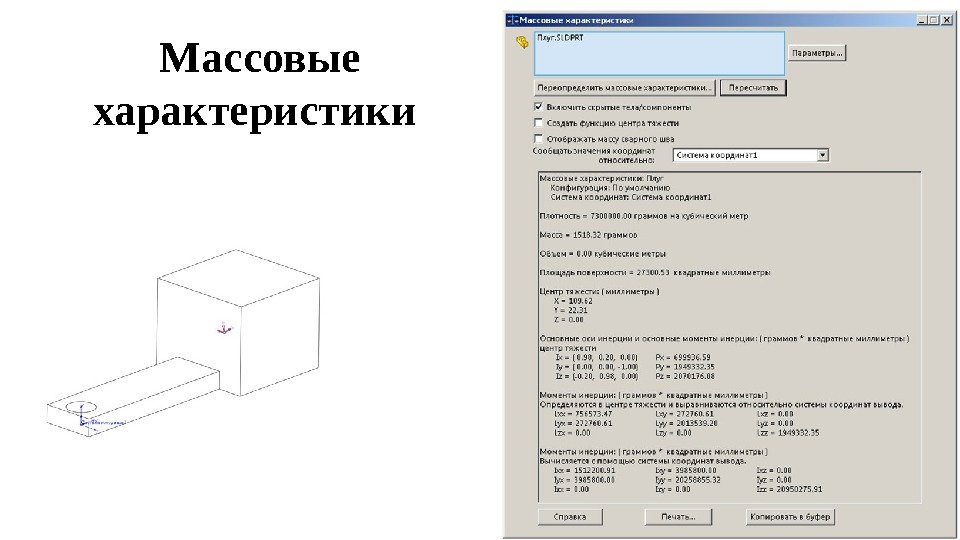
Массовые характеристики
Массовые характеристики
Схема вычислительного эксперимента в SOLIDWORKS Motion
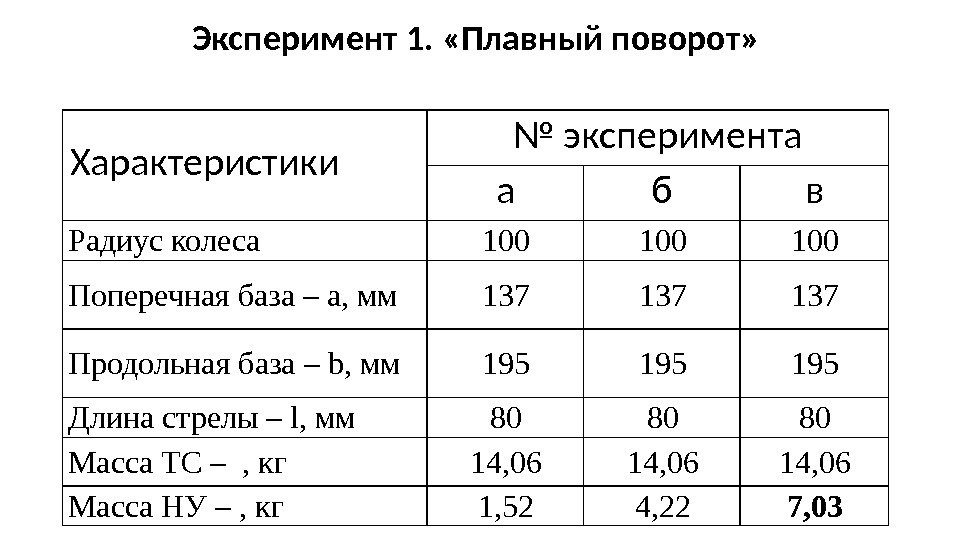
Эксперимент 1. «Плавный поворот» Характеристики № эксперимента а б в Радиус колеса 100 100 Поперечная база – а, мм 137 137 Продольная база – b, мм 195 195 Длина стрелы – l, мм 80 80 80 Масса ТС – , кг 14, 06 Масса НУ – , кг 1, 52 4, 22 7,
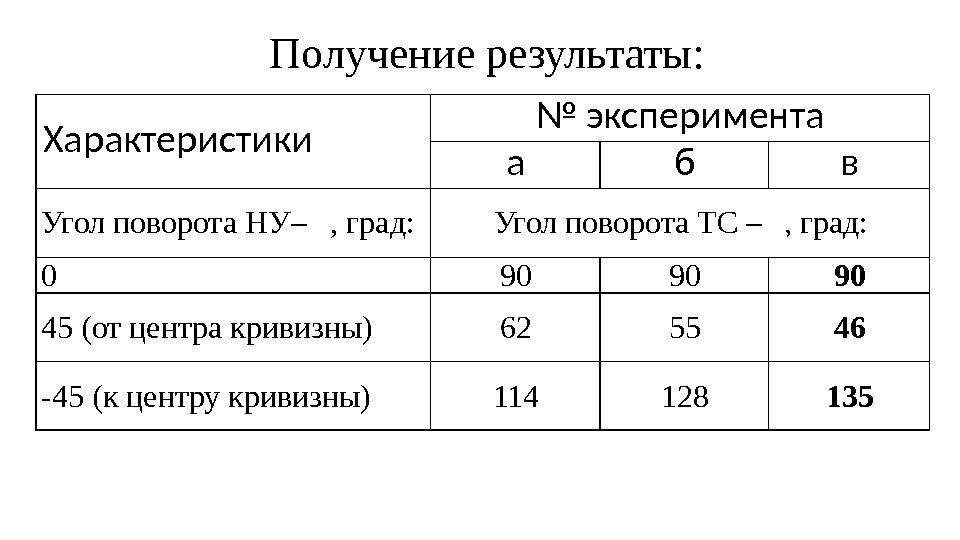
Получение результаты: Характеристики № эксперимента а б в Угол поворота НУ– , град: Угол поворота ТС – , град: 0 90 90 90 45 (от центра кривизны) 62 55 46 -45 (к центру кривизны)
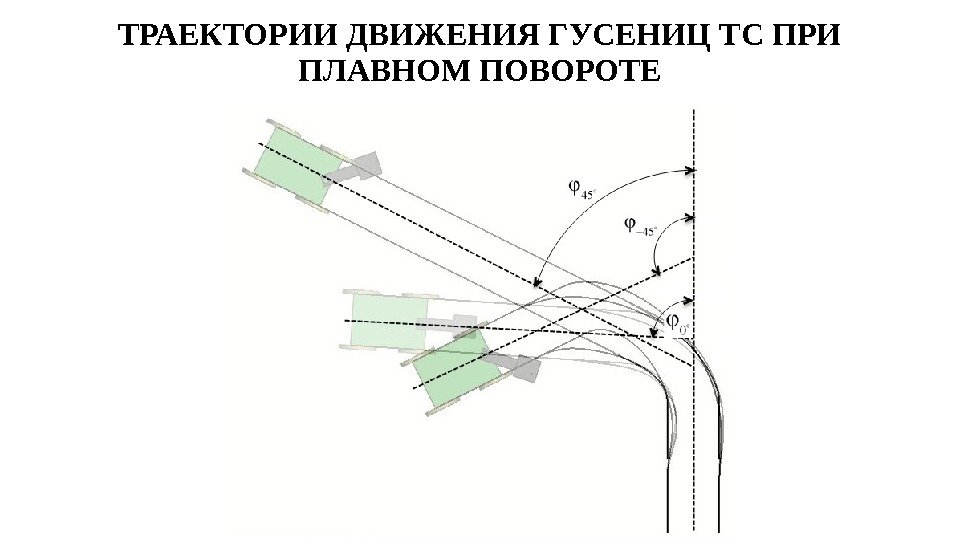
ТРАЕКТОРИИ ДВИЖЕНИЯ ГУСЕНИЦ ТС ПРИ ПЛАВНОМ ПОВОРОТЕ
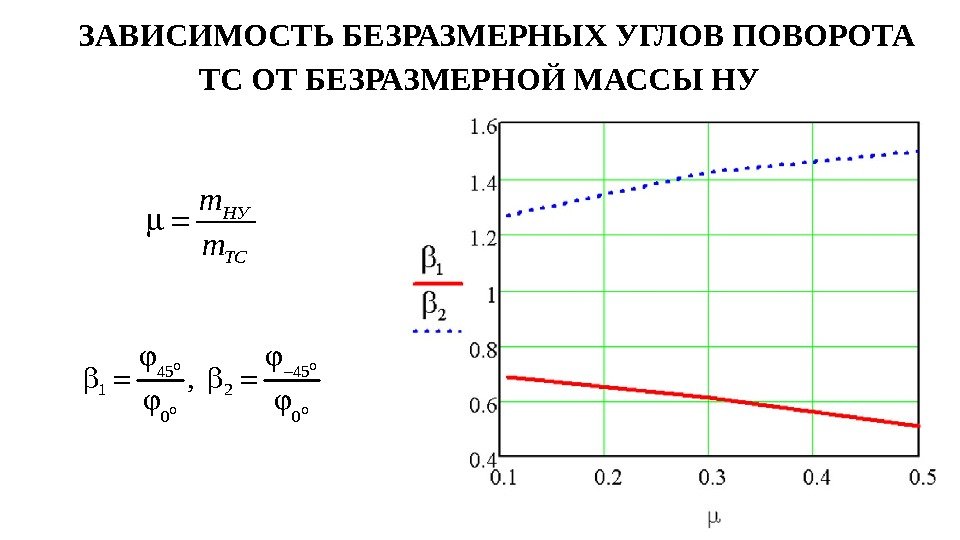
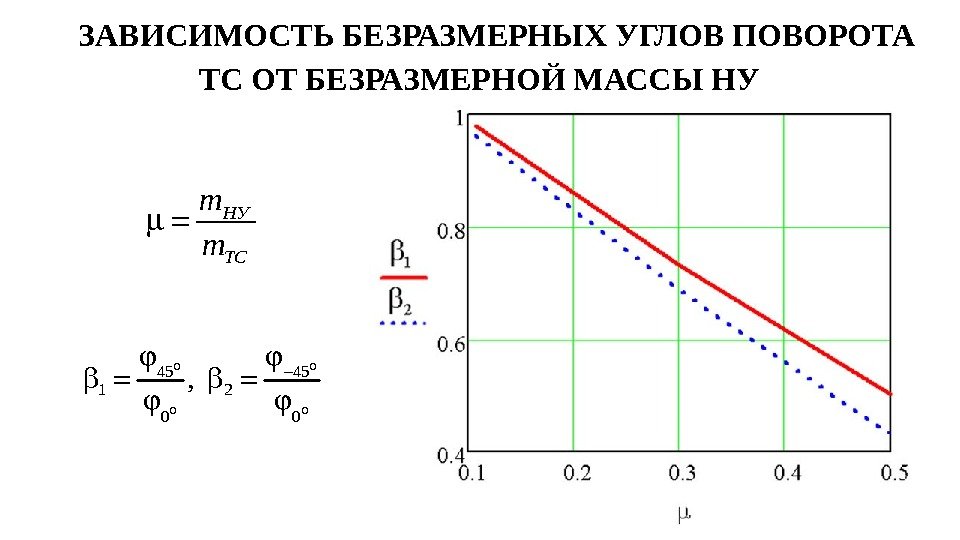
ЗАВИСИМОСТЬ БЕЗРАЗМЕРНЫХ УГЛОВ ПОВОРОТА ТС ОТ БЕЗРАЗМЕРНОЙ МАССЫ НУНУ ТС m m 45 45 1 2 0 0 , o o
В результате вычислительных экспериментов впервые доказано, что для увеличения угла поворота транспортного средства при схеме «плавный поворот» требуется отклонение навесного устройства к центру кривизны траектории транспортного средства, при чем эффективность поворота увеличивается при увеличении относительной массы навесного устройства.
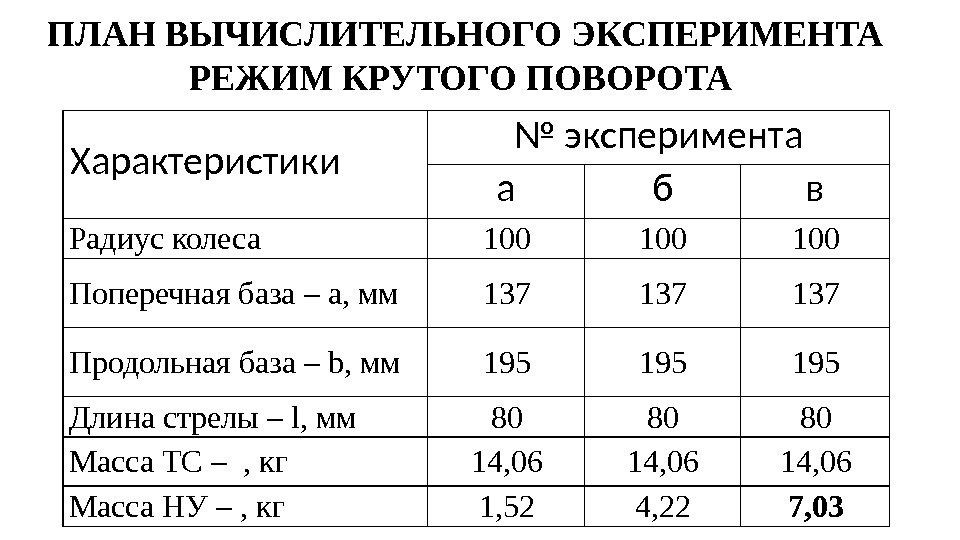
ПЛАН ВЫЧИСЛИТЕЛЬНОГО ЭКСПЕРИМЕНТА РЕЖИМ КРУТОГО ПОВОРОТА Характеристики № эксперимента а б в Радиус колеса 100 100 Поперечная база – а, мм 137 137 Продольная база – b, мм 195 195 Длина стрелы – l, мм 80 80 80 Масса ТС – , кг 14, 06 Масса НУ – , кг 1, 52 4, 22 7,
Получение результаты: Характеристики № эксперимента а б в Угол поворота НУ– , град: Угол поворота ТС – , град: 0 92 93 118, 5 45 (от центра кривизны) 89 36 23, 8 -45 (к центру кривизны) 74 50 24,
ТРАЕКТОРИИ ДВИЖЕНИЯ ГУСЕНИЦ ТС ПРИ КРУТОМ ПОВОРОТЕ
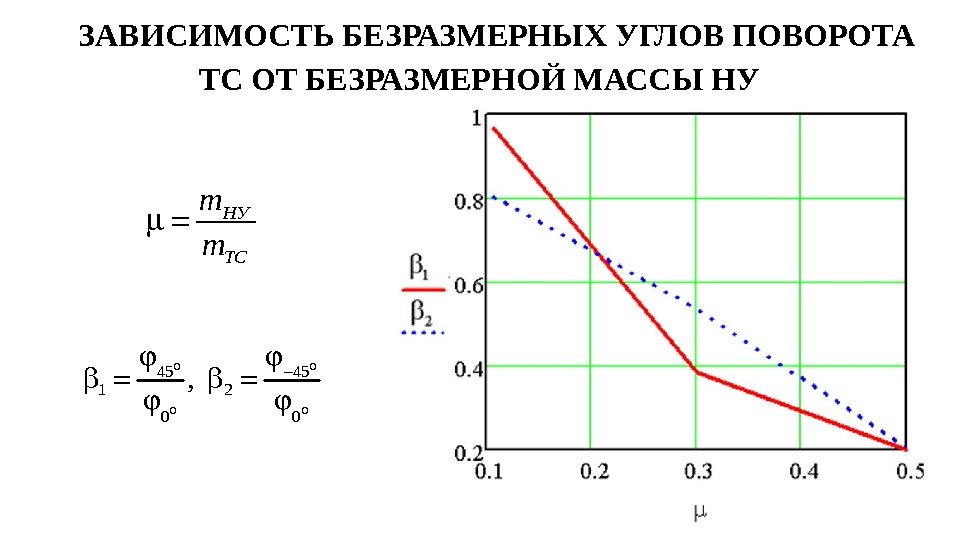
ЗАВИСИМОСТЬ БЕЗРАЗМЕРНЫХ УГЛОВ ПОВОРОТА ТС ОТ БЕЗРАЗМЕРНОЙ МАССЫ НУНУ ТС m m 45 45 1 2 0 0 , o o
В результате вычислительных экспериментов впервые доказано, что для схемы «крутой поворот» оптимальный угол поворота достигается при расположении навесного устройства на продольной оси транспортного средства, при чем эффективность поворота увеличивается при уменьшении относительной массы навесного устройства.
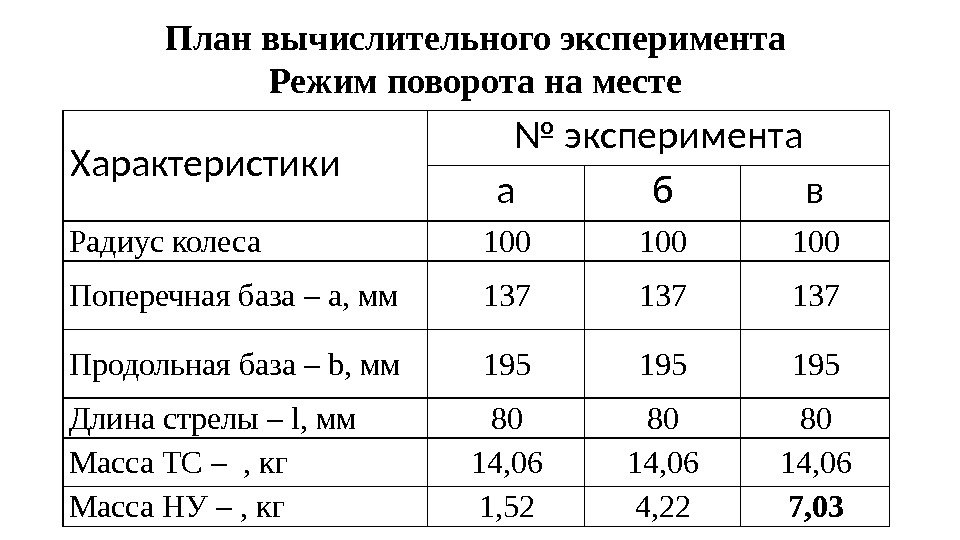
План вычислительного эксперимента Режим поворота на месте Характеристики № эксперимента а б в Радиус колеса 100 100 Поперечная база – а, мм 137 137 Продольная база – b, мм 195 195 Длина стрелы – l, мм 80 80 80 Масса ТС – , кг 14, 06 Масса НУ – , кг 1, 52 4, 22 7,
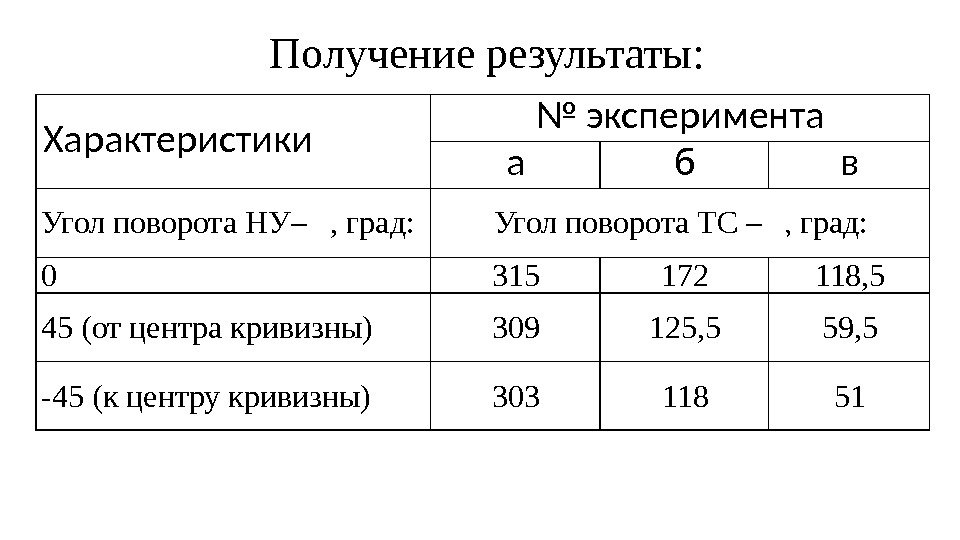
Получение результаты: Характеристики № эксперимента а б в Угол поворота НУ– , град: Угол поворота ТС – , град: 0 315 172 118, 5 45 (от центра кривизны) 309 125, 5 59, 5 -45 (к центру кривизны)
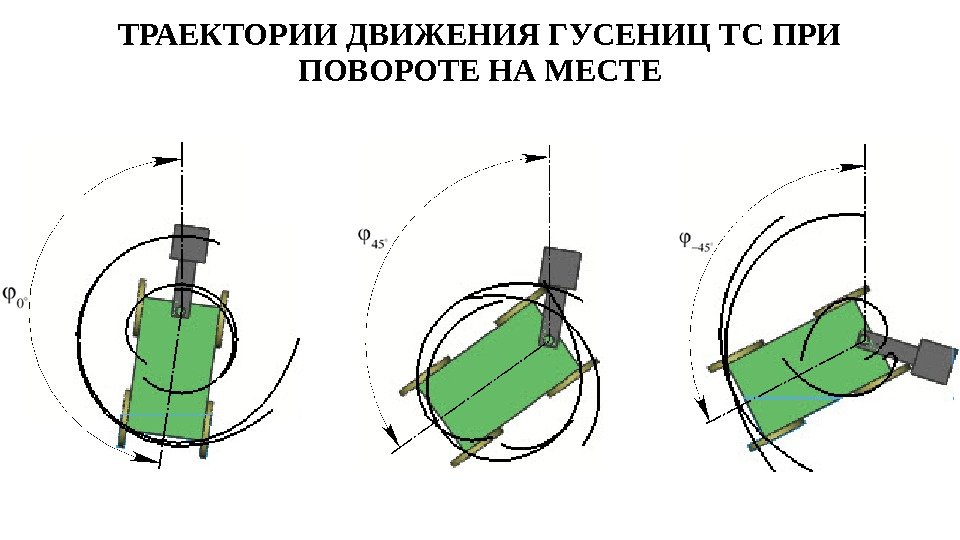
ТРАЕКТОРИИ ДВИЖЕНИЯ ГУСЕНИЦ ТС ПРИ ПОВОРОТЕ НА МЕСТЕ
ЗАВИСИМОСТЬ БЕЗРАЗМЕРНЫХ УГЛОВ ПОВОРОТА ТС ОТ БЕЗРАЗМЕРНОЙ МАССЫ НУНУ ТС m m 45 45 1 2 0 0 , o o
В результате вычислительных экспериментов впервые доказано, что для схем «крутой поворот» , «поворот на месте» оптимальный угол поворота достигается при расположении навесного устройства на продольной оси транспортного средства, при чем эффективность поворота увеличивается при уменьшении относительной массы навесного устройства.
ИЗГОТОВЛЕНИЯ МАКЕТА И РАЗРАБОТКА СИСТЕМЫ УПРАВЛЕНИЯ Используя результаты предыдущего раздела, поставлена задача разработки системы управления гусеничного транспортного средства с навесным устройством.
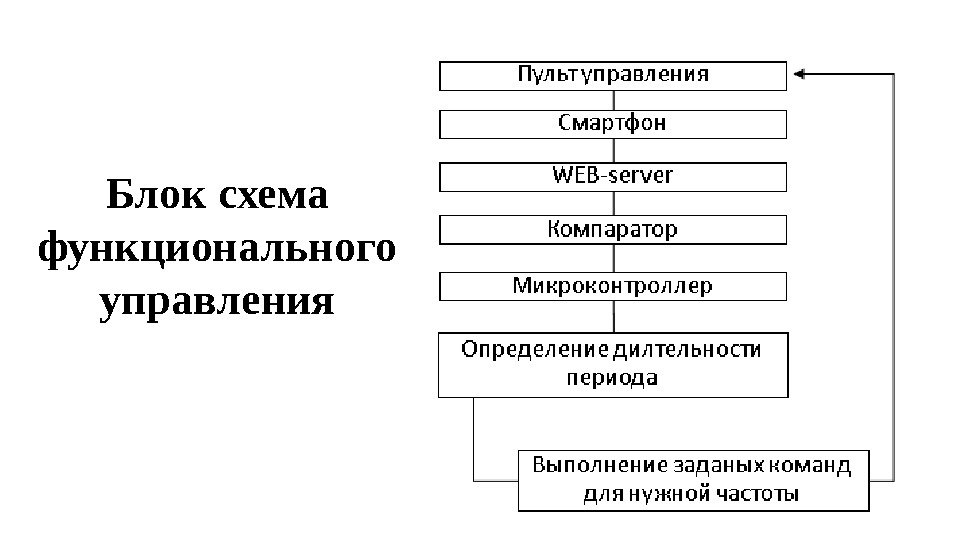
Блок схема функционального управления
СКРИНШОТ ПРОГРАММЫ AUDACITY, СИНУСОИДА
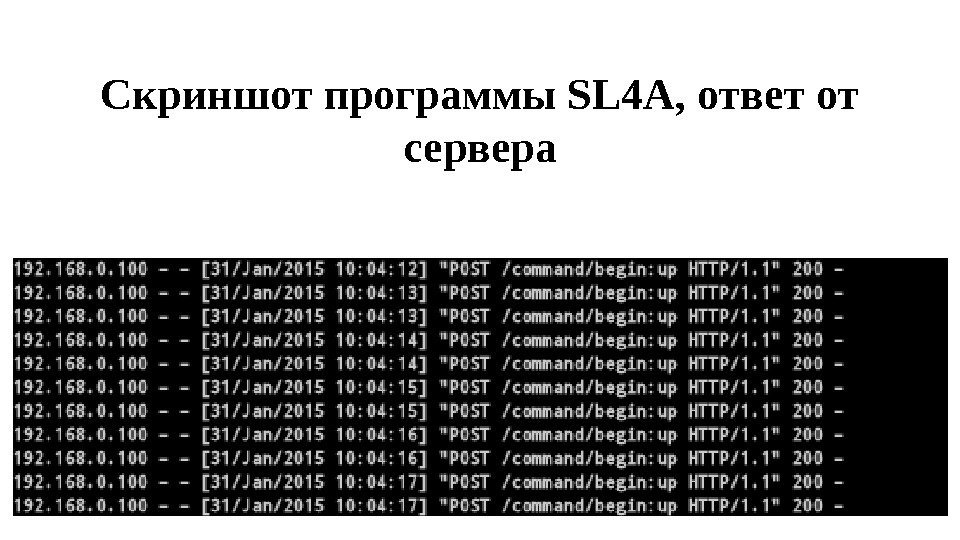
Скриншот программы SL 4 A, ответ от сервера
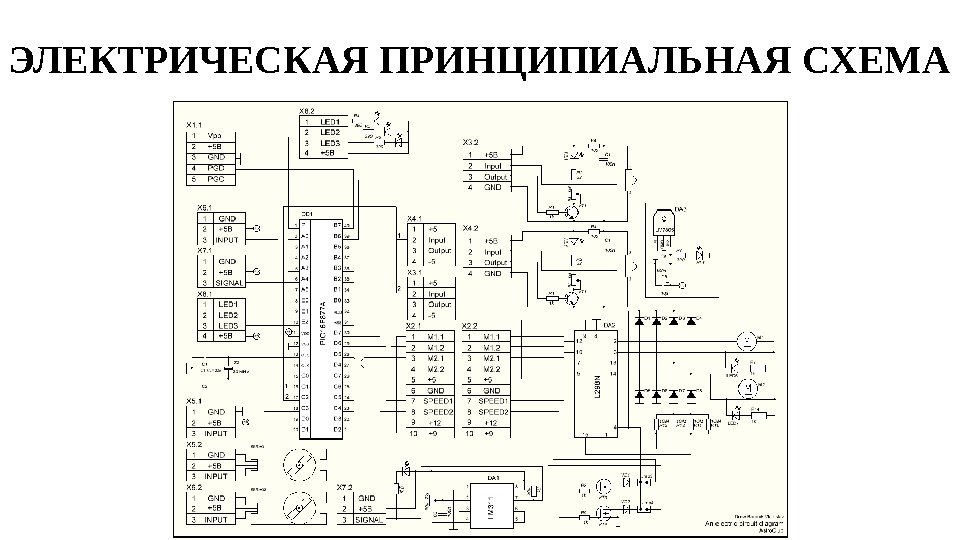
ЭЛЕКТРИЧЕСКАЯ ПРИНЦИПИАЛЬНАЯ СХЕМА
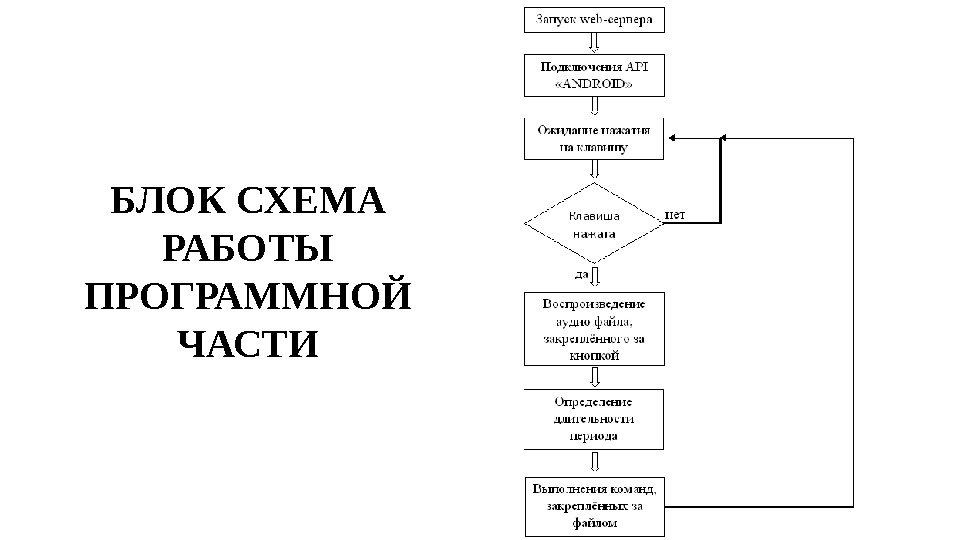
БЛОК СХЕМА РАБОТЫ ПРОГРАММНОЙ ЧАСТИ
ВЕРХНЯЯ ЧАСТЬ РОБОТА
РАСПОЛОЖЕНИЕ ЭЛЕКТРОНИКИ ПОД КРЫШКОЙ РОБОТА
ИССЛЕДОВАНИЕ МОДЕЛИ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА Задача: На натурной модели исследовать крутой поворот ТС с различными углами отклонения НУ и сравнить с результатами ВЭ
НАТУРНЫЙ ЭКСПЕРЕМЕНТ
СРАВНЕНИЯ НАТУРНОГО И ВЫЧИСЛИТЕЛЬНОГО ЭКСПЕРИМЕНТОВ ДЛЯ КРУТОГО ПОВОРОТА ТС Угол поворота НУ– , град: Угол поворота ТС – , град: Натурная модель Компьютерная модель 0 92 106 45 (от центра кривизны) 89 104 -45 (к центру кривизны) 74 89 В результате натурного эксперимента подтверждена адекватность расчетной модели SOLIDWORKS Motion и натурной моделей с погрешностью, не превышающей 17%.
ВЫВОДЫ Научно-исследовательская работа является законченной научной работой в которой решена актуальная научная задача , которая состоит в обоснование параметров и разработка системы управления гусеничным транспортным средством с навесным устройством.
Гусеничный движитель и система его управления является одним из важнейших компонентов, определяющих тяговые качества, производительность, экономичность и надежность всех этих машин. Машины с гусеничным движителем очень часто используют навесное оборудование, которое за счет смещения центра тяжести конструкции усложняют процесс перемещения и маневрирования машины. Техническая идея нашей работы – повысить эффективность управления машины с гусеничным движителем путем поворота навесным устройством. При повороте машины возникает пара сил трения, которая стремиться повернуть машину и пара сил трения препятствующая этому.
Статика, кинематика и динамика в гусеничном движителе описывается сложными нелинейными моделями. Поэтому, для исследования механического движения целесообразно использовать инструмент Solid. Works Motion, который предназначен для решения задач расчета механического движения. Впервые доказано , что для увеличения угла поворота транспортного средства при схеме «плавный поворот» требуется отклонение навесного устройства к центру кривизны траектории транспортного средства, при чем, эффективность поворота увеличивается при увеличении относительной массы навесного устройства.
Впервые обосновано , что для схем «крутой поворот» и «поворот на месте» , оптимальный угол поворота достигается при расположении навесного устройства на продольной оси транспортного средства, при чем, эффективность поворота увеличивается при уменьшении относительной массы навесного устройства. В результате натурного эксперимента подтверждена адекватность расчетной модели SOLIDWORKS Motion и натурной моделей с погрешностью, не превышающей 17%. Экспериментально доказана работоспособность принятых технических решений по системе управления. Доказано, что система управления обеспечивает: минимальное время ответа между устройством и web-сервером, решение поставленных задач алгоритмом исполнителя, трансляция изображения на экран пульта управления.
Спасибо за внимание!