ec3c185fbcf0ed5d863b601446f61537.ppt
- Количество слайдов: 36



Mining and Robotics A next new thing joins the commodities bull market Presentation to the Northwest Mining Association December 10, 2004 by Bill Fox

Mining and Robotics Overview • Characteristics of Robotics. Robotic trends, phases of automation, variations in applications, strategic nature of robotics • First Generation Applications. Involves modification of conventional devices such as Load-Haul Dump (LHD) vehicles and drilling equipment. • Second Generation Applications. Creation of dedicated tele-operated robots such as Placer Domes’ Mini. Mole or Sandvik Tamrock ARM 1100 • Third Generation Paradigm Shift. Autonomous robots in an exclusively robotic environment, such as the continuous robotic excavation and processing of ore in deliberately flooded mines 10 km underground.

Robotic Trends • Global mobile robotics market expected to expand from $5 billion to over $70 billion by 2025 • “Moore’s Law, ” involves a doubling of processing power about every 20 months. This is a key driver • Robot modules are steadily coming down in price while increasing in capabilities, although each at different rates. At some point this creates economic applications.

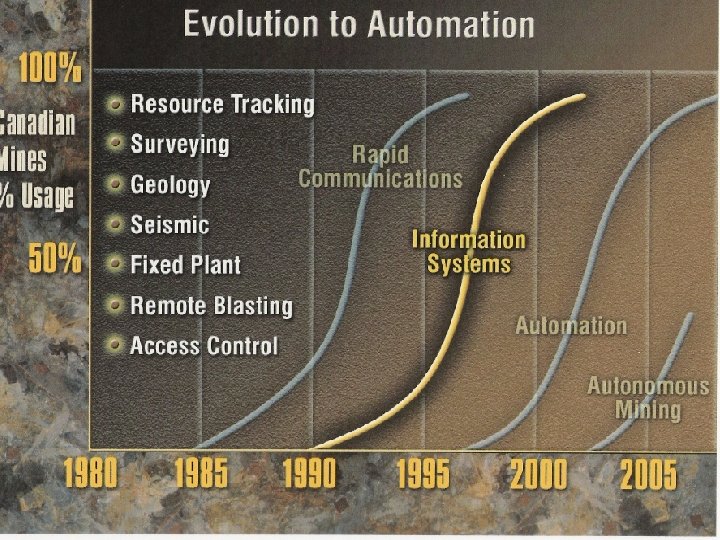
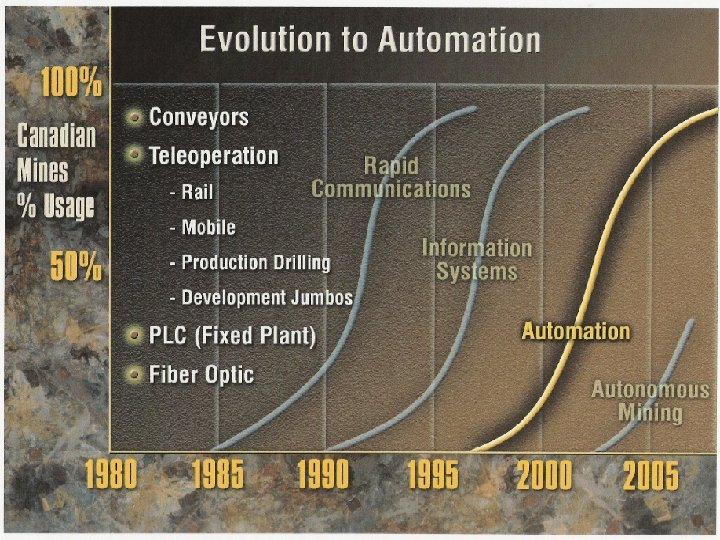
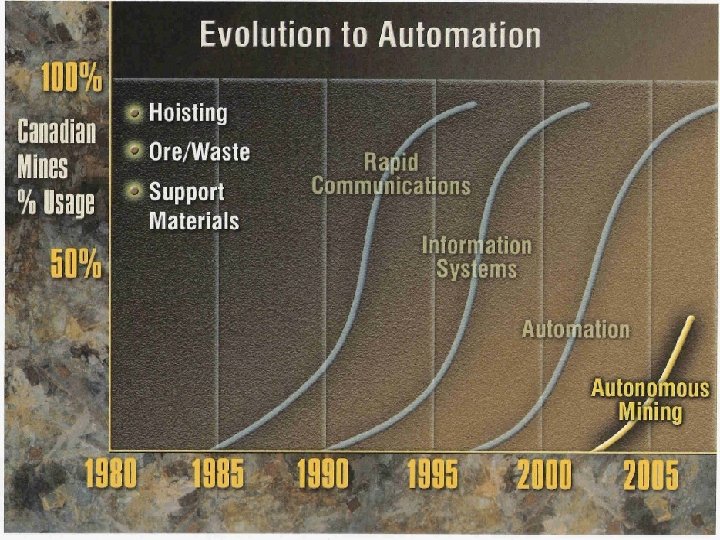
The “Robolution” incorporates electronic infrastructure created during prior telecommunications and automation phases. The first phase has been accomplished, the others have lagged. [Soure: 1992 overview by Hatch Associates for Industry Science and Technology of the Canadian Federal Government]

What is a robot? • Machine capable of behavioral sequences, sensing environment, self-propulsion (for mobile vs. fixed robotics), and artificial intelligence • Modules: Frame (skeleton) , Power System, Actuators (muscle), Drive Train (feet), Controllers (brain) , Sensors, End Effectors (working hands), Communication, Outer Shell (skin) [Pictures: Tetra Vaal, The Embassy Visual Effects, www. theembassyvfx. com; i. Robot’s Ariel robot crab, www. irobot. com]

Variations in applications • “Robotization” is invading all areas of the structure of production in all industries. For example, Newmont’s automated assay labs at Carlin, NV, Australia’s Universal Dragline innovation • “Robotization” builds on “sensor suites” embedded in equipment. A typical Load Haul Dump (LHD) vehicle may be outfitted with 150 sensors • “Robotization” ultimately means the reconceptualization of mining jobs and operations • Japanese are spending over $100 million a year on robotic R&D [Upper left: Intuit Surgical’s teleoperated Da Vinci System. Lower left, a Load-Haul-Dump vehicle that uses a light rope for autonomous navigation. Picture courtesy of MD Robotics. ]

One operating system can serve many industries. Is there a macro-strategic role for robotics in general, and an overlap with robotic mining applications in particular? Another litmus test question: “What if I wake up one morning and learn that a hostile country has one million robots with human-level intelligence, which can design and manufacture even more intelligent robots at an increasing rate and we have nothing to compare with this? ”

First Generation Robotics in Mining: Adapting conventional devices and work processes [photo source: Automated Mining Systems/MD Robotics, automatedmining. ca]

Teleoperation • Objective: run existing equipment longer, faster, and cheaper • Applied to drilling equipment, Load-Haul. Dump (LHD) vehicles, and trucks • Examples: Inco’s Stobie mine in Canada, LKAB’s Kiruna mine in Sweden, and WMC Resources’ mine in Australia [Diagram courtesy of MD Robotics. Please visit automatedmining. ca]

Teleoperation • It is much more than a person working pedals and a joystick • Objective is to shape specific behaviors with artificial intelligence, increase autonomy • Each teleoperator controls an increasing number of machines [Pictures courtesy of MD Robotics. Please visit automatedmining. ca]

Advantages • Teleoperation reduces machine down time caused by worker transit time into and out of the mine. More machine time = more throughput • Reduces wear and tear on machines when artificial intelligence programs shape optimal behaviors • Increases worker safety • Only. 1 second delay over 600 mile distance

Disadvantages • Does not help much if it does not free up a bottleneck. Many bottlenecks are related to such factors as frequent blasting schedules or maintenance breakdowns that may be out of the reach of current robotic technology. • Up front capital costs • Does not solve organizational problems if a company suffers from poor leadership and general inefficiency to begin with.

Case Study: LHD Automation • Installation cost: $400, 000, capital cost $2, 000, total cost of $2, 400, 000 • Extend LHD usage from 5 hrs to 7 hrs in an 8 hour shift, one hr left for maintenance. LHD runs 3 shifts a day, 21 out of 24 hours. • Use of LHD increases to about 2, 160 hours a year, so we must hire an extra maintenance laborer at $46, 000 a year plus $50, 000 extra in parts • Achieve $3, 007, 568 extra revenue from extra 2, 160 hours at some certain commodity price • Payback 9. 9 months, IRR 68% on five year pro forma • Question: What would the alternative have been to have simply hired extra labor to overlap four shifts a day?

Typical trade-off: to pay for more human labor vs. pay for robots • Total cost of ownership (“x” axis) • Vs Size of facility (y axis) • Robots initially more expensive, but lower overall cost over higher volume or longer period of use [Source: INtelli. Bot. Please visit intellibotrobotics. com for product information]

Technological constraints • LHD can tram and unload autonomously, but needs guidance when loading from a muck pile to avoid hitting walls • Limited learning ability to memorize turning points in corridor intersections and total distance of trip. Still heavily reliant on dead reckoning and constrained by limited shape recognition. [Diagram courtesy of MD Robotics. Please visit automatedmining. ca]
 uses a pair")
3 -D visual mapping MD Robotics’ Instant Mine Modeler (i. MM) uses a pair of cameras to create a 3 -D virtual model (below right) inside a computer based on ambient light. The system can measure distances from the camera to hundreds of thousands of points, and also creates 3 D mine maps. [Pictures courtesy of MD Robotics. Please visit automatedmining. ca]

Laser navigation and mapping • Lasers can determine the dimensions of drill holes and other dark cavities • More expensive than cameras for visual mapping • With a robot, you can have both lasers and visual systems [Picture courtesy of MD Robotics. Please visit automatedmining. ca]

The human brain makes manipulation and navigation seem vastly easier than arithmetic, when in fact it requires vastly more processing power [diagram: courtesy Dr. Hans Moravec from his book Robot: Mere Machines to Transcendent Mind]

Teaching robots manipulation is still very hard • Most robots currently have the manipulation and navigation intelligence level of a two month old human infant • Can recognize faces, but not age progression • Very limited ability to pick up simple objects [MIT research robot Cog playing with a slinky toy, copyright Peter Menzel, please see his book Robo Sapiens: Evolution of a New Species/MIT Press]

Second Generation Mining Robots: Designed as robots for hostile environments Test run of Placer Dome’s Mini. Mole (below). [source: please visit www. placerdome. com]

Placer Dome’s official disclosure: “One of the most exciting projects under way is the development of a novel machine that will allow the `surgical’ mining of narrow vein and reef-type deposits. This mechanical mining method is designed to improve safety by removing miners from the active rock face in underground mines. It also aims to drastically reduce the amount of development and waste dilution that is experienced with conventional methods. ”

Modular Dimension • The “end effector” (the part of the robot that does the work) can “pull” on the other modules to make the concept workable. • Mini. Mole probably exploits new Oscillating Disc Cutter technology for drilling rock. ODC is mounted on Sandvik Tamrock’s ARM 1100 teleoperated robot.

Modification of Work Concepts • “Turn it on and walk away” slogan of the Roomba robot vacuum cleaner. So what if Mini. Mole takes longer to drill if you have lots of them working continuously, and it is not on “human” time? • Placer Dome can now use this concept to put more emphasis on growing its reserves by the drill bit [photo: i. Robot’s Roomba. Please visit irobot. com for product information]

Other second generation characteristics • Robots are still teleoperated • Although each robot might perform finite tasks, they can act like an ant colony or a mobile assembly line in the field to achieve continuous process flow from excavation to final product. • Robots can carry myriad sensors and be the tip of the iceberg of a database management and analysis system

Third Generation Paradigm Shift [scene: Captain Nemo shows his guests strange new things aboard the Nautilus]

Why lasers under water? • Dr. Greg Baiden, who holds the Canadian Research Chair in Mine Automation and Robotics, is exploring using lasers rather than cords to teleoperate submersible robots so that they do not tangle in trailing control lines. • In open air applications, lasers might supply more bandwidth to open pit robots constrained by governmentmandated frequency limits • Lasers might make it feasible for submersible mining robots to work in deliberately flooded mines deeper than 5 km. Water pressure can offset tremendous earth pressures that cause exploding rocks and also overcome increasing heat problems at greater depths.

Making a friend out of an enemy • Water has historically been an enemy to pump out. Submersible robots make it a friend. • Robots can travel in 3 -D to ferry ore or can be connected to long hoses to pump it out in a slurry. • Submersion requires a completely robotic environment. Opportunities exist under the ocean, in already flooded mines, and in underground mines so deep it makes sense to flood them for submersible operations.

Possible Objection: Lasers are line-of-sight. Also, steady electrical power may be needed for long periods that require a cord connection. • Possible solution idea: Create a “mother ship” connected to long electric cords, teleoperation cable, and other possible power sources. Use it as a docking station for smaller worker bots to recharge. The robots can relay laser signals to each other • Another possible solution idea for the cord problem: Turn the cords themselves into robots as snakebots. Each segment carries a computer chip, allowing it to recombine with other segments in new ways.

Strategic Issues • The mining industry offers developmental challenges relevant to general robotics. The industry will likely be flush with cash from rising commodity prices to support R&D that both helps itself and supports broader strategic goals. • Regarding autonomous vehicles, a few years ago Congress mandated the U. S. Army to have as its goal one robot for every third Army vehicle by the year 2015 [Picture: artist concept at DARPA site darpa. mil/grandchallenge 04/index. htm]

Social Issues: Robots and Humans Should Be Friends • Automation expands the division of labor, increases the number of jobs and wealth over the long term • On balance, the alternatives are worse • Technology is only a form of leverage, and while it can make social problems more solvable, it is up to people themselves to solve their own problems • The character of automation reflects the character of the underlying society [Forbidden Planet’s Altaira Morbius and Robby. Copyright 2004 Anne Francis. Please visit www. annefrancis. net ]

“The U. S. needs to change its culture so scientists and engineers, not athletes, are heroes. [If it doesn’t] this country will continue to get what it celebrates. ” Dean Kamen founder of F. I. R. S. T. • F. I. R. S. T and ROBOlympics competitions have had great success stimulating grass roots interest in robotics • Mining companies should provide incentives for their employees to embrace the “robolution” and initiate their own pet 2 nd generation projects like Placer Dome’s Mini. Mole. They should even consider reaching for the 3 rd generation. • Some day it would be a good thing to have a mining industry “Robot Hall of Fame” to honor robot developers and their creations.

For more information • To learn more, see my article on the web “Mining and Robotics” and also my overview article on the mobile robotics industry. • Please refer to my web site www. amfir. com, and click on “Bill Fox Archive” to see other articles and works in progress. • Also, please visit web sites for MD Robotics, Penguin ASI, and SIAMtec. [Montage: The many activities of Automated Mining. Systemts/MD Robotics, www. automatedmining. ca]

Special thanks for assistance in researching this project • • Placer Dome Technical Services Newmont Mining Technical Services MD Robotics Penguin ASI SIAMtec Eric Jackson, Cellula Robotics, Vancouver, B. C. Dr. John P. H. Steel Colorado School of Mines Prof. E. M. Nebot, Australian Centre for Field Robotics, U. of Sidney QRIO image courtesy of Sony Corporation
ec3c185fbcf0ed5d863b601446f61537.ppt