МХТ_Л-02_00.ppt
- Количество слайдов: 29



Мехатронные модули Мехатронный модуль - обеспечивает управляемое движения по одной координате • Базовый объект мехатроники • Возможна реализация управляемого движения по 2 -м и более координатам в одном модуле. • Мехатронная система - функциональное объединение нескольких модулей Управляющий компьютер 6 -ти координатная мехатронная система Х Модуль 1 Модуль 2 Y Модуль 3 Y Z Модуль 4 Модуль 5 Модуль 6 Z Х Заданное функциональное движение рабочего органа

Мехатронный модуль Сенсоры Контроллер Силовой ФП Электромеханический ФП ММ Центральный контроллер ММ ММ Рабочий орган ММ Стандартная иерархическая архитектура Рабочий орган Заданное функциональное движение

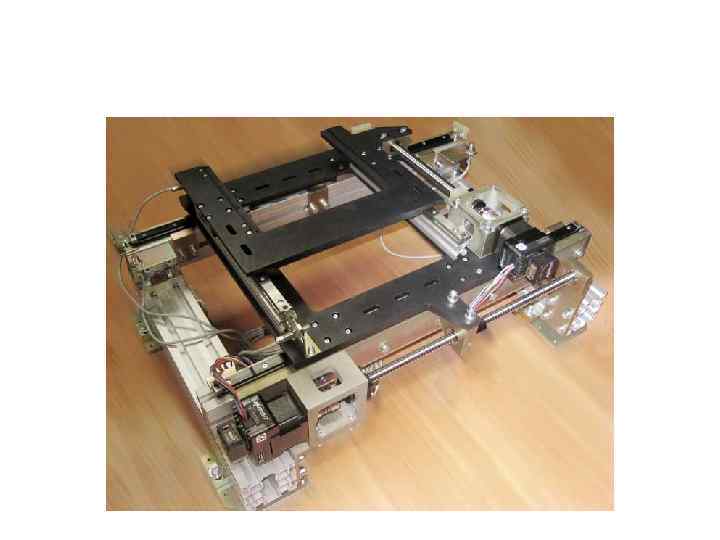
Контроллер Модуль линейного движения Сенсор Редуктор Драйвер

Мехатронные модули движения Сенсоры движения Контроллер Силовой ФП Электромеханический ФП Механический ФП Рабочий орган Мехатронный модуль движения Сенсоры ММД Контроллер ММД Управление Выдача заданий движением Наблюдение рабочего органа Сбор данных Внешние сети ММД Силовой ФП Рабочий орган Объект ММД SCADA Внешний компьютер Внешние воздействия

Мехатронные модули движения

Основные элементы мехатронных модулей движения Мехатронный модуль движения Двигатели Преобразователи движения Тормозные механизмы Люфтовыбирающие механизмы Направляющие устройства Углового движения Винтовые Планетарные Реечные Червячные Фрикционные Ременные Волновые Мальтийские Цевочные Механические Электрические Гидравлические Пневматические Винтовых преобразователей Зубчатых преобразователей Скольжения Качения Профильные Цилиндрические Линейного движения Сенсоры Положения Перемещения Скорости

Станок лазерной резки СЛТ-1500 х1500

Мехатроника и робототехника Роботы первого поколения - роботы с программным управлением, работающие по заранее заданной жесткой программе Роботы второго поколения - роботы с адаптивным управлением, которые имеют средства очувствления и поэтому могут работать в заранее не регламентированных и меняющихся условиях, например, брать произвольно расположенные предметы, обходить препятствия и т. д. Роботы третьего поколения - роботы с интеллектуальным управлением (с искусственным интеллектом), которые наряду с очувствлением имеют систему обработки внешней информации, обеспечивающую им возможность интеллектуального поведения, подобного поведению человека в аналогичных ситуациях.

Что дает мехатроника Токарный станок, 20 мкм Обрабатывающий центр, мкм Фрезерный станок, мкм 1 20 Шлифовальный станок, мкм 1

Сварочный робот 3 D-принтер

Нетрадиционные транспортные средства

Мехатроника в автомобиле Сцепление Коробка передач Климат-контроль Автопарковка Дворники Трансмиссия Зажигание Регулировка кресел Тормоза Регулировка фар Охлаждение Подвеска Антиблокировочная система (AБC) Система тягового контроля (TCS) Система курсовой устойчивости (ESP)



Мехатроника и робототехника

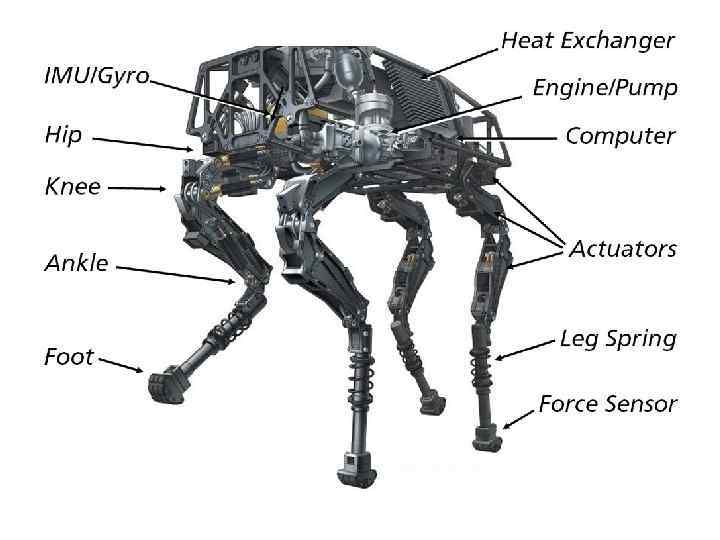
Боевой вариант робота «Big Dog»


Промышленные роботы

Промышленные роботы
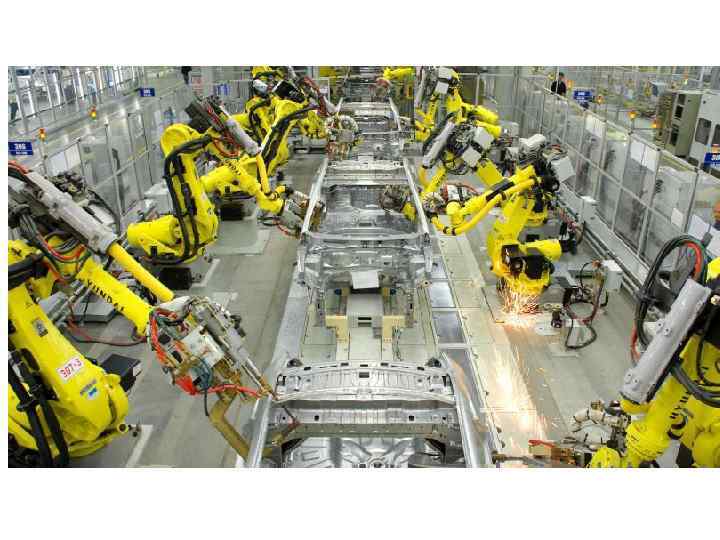

Промышленные роботы

Роботы в медицине

Механизмы с параллельной кинематической схемой

Стандартная кинематическая схема манипулятора Кинематическая схема параллельного поступательного и вращательного механизма

Гексаподы

АВИАТРЕНАЖЕР

Основные преимущества гексаподных машин Ø сокращение времени подготовки производства за счет объединения обрабатывающих, разметочных и измерительных функций в единой мехатронной системе; Ø высокая точность измерений и обработки, которая обеспечивается повышенной жесткостью стержневых механизмов (до 5 раз), применением прецизионных датчиков обратной связи , использованием компьютерных методов коррекции внешних воздействий; Ø повышенная скорость движений (скорость быстрых перемещений достигает 10 м/с, рабочих движений – до 2, 5 м/с); Ø отсутствие направляющих (в качестве несущих элементов конструкции используются приводные механизмы), отсюда улучшенные массогабаритные характеристики и материалоемкость; Ø высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость; Ø высокое качество управления движением благодаря малой инерционности механизмов, применению линейных мехатронных модулей движения как объектов управления, использованию методов автоматизированной подготовки и исполнения в реальном времени управляющих программ, наличию дружелюбного интерфейса «человек- машина» .
МХТ_Л-02_00.ppt