

 Механика Часть 2. Кинематика
Механика Часть 2. Кинематика
 2. 1 Основные понятия • Кинематика – раздел теоретической механики, изучающий механическое движение без учета сил, вызывающих это движение, состоит из двух частей: – Кинематика точки – Кинематика твёрдого тела • Траектория движения – это линия, по которой движется тело. • Пройденный путь – это длина соответствующей части траектории. • Перемещение – это вектор, соединяющий начальное и последующее положение тела. • Уравнение движения определяет положение точки в зависимости от времени
2. 1 Основные понятия • Кинематика – раздел теоретической механики, изучающий механическое движение без учета сил, вызывающих это движение, состоит из двух частей: – Кинематика точки – Кинематика твёрдого тела • Траектория движения – это линия, по которой движется тело. • Пройденный путь – это длина соответствующей части траектории. • Перемещение – это вектор, соединяющий начальное и последующее положение тела. • Уравнение движения определяет положение точки в зависимости от времени
 2. 2 Три способа задания движения точки: • Векторный способ: Задается величина и направление радиусавектора. • Координатный способ: Задаются координаты положения точки. • Естественный способ: Задаются закон движения точки и траектория. M O Все три способа задания эквивалентны и связаны между собой. M Скорость точки – величина, характеризующая быстроту изменения положения точки в пространстве. Ускорение точки – величина, характеризующая быстроту изменения скорости точки. O dy
2. 2 Три способа задания движения точки: • Векторный способ: Задается величина и направление радиусавектора. • Координатный способ: Задаются координаты положения точки. • Естественный способ: Задаются закон движения точки и траектория. M O Все три способа задания эквивалентны и связаны между собой. M Скорость точки – величина, характеризующая быстроту изменения положения точки в пространстве. Ускорение точки – величина, характеризующая быстроту изменения скорости точки. O dy
 •
•
 •
•
 2. 3 Кинематика точки •
2. 3 Кинематика точки •
 •
•
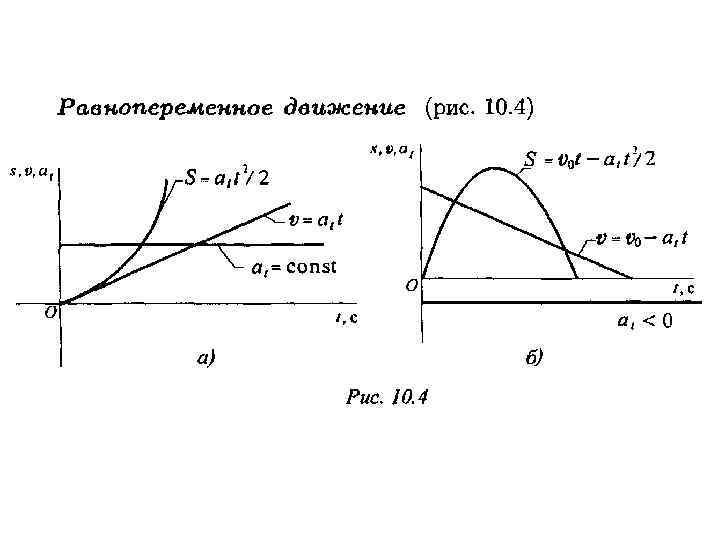
 Неравномерное движение скорость и ускорение меняются 2. 3. 3 Кинематические графики
Неравномерное движение скорость и ускорение меняются 2. 3. 3 Кинематические графики
, при котором любая") 2. 4 Поступательное движение твёрдого тела – Движение (прямолинейное или криволинейное), при котором любая прямая в теле остаётся параллельной самой себе – Все точки тела описывают одинаковую траекторию, имеют одинаковые скорости и ускорения – Для описания движения тела можно рассматривать движение одной его точки (обычно центра масс)
2. 4 Поступательное движение твёрдого тела – Движение (прямолинейное или криволинейное), при котором любая прямая в теле остаётся параллельной самой себе – Все точки тела описывают одинаковую траекторию, имеют одинаковые скорости и ускорения – Для описания движения тела можно рассматривать движение одной его точки (обычно центра масс)
 2. 5 Вращательное движение твёрдого тела • все точки тела описывают окружности вокруг общей неподвижной оси (оси вращения). • Для определения положения тела в любой момент времени используется уравнение φ =f(t), где φ — угол поворота тела, [φ] = рад; • Угловая скорость, ω — определяет изменение угла поворота в единицу времени, [ω] = рад/с. • Иногда для оценки быстроты вращения используют угловую частоту вращения n, которая оценивается в оборотах в минуту.
2. 5 Вращательное движение твёрдого тела • все точки тела описывают окружности вокруг общей неподвижной оси (оси вращения). • Для определения положения тела в любой момент времени используется уравнение φ =f(t), где φ — угол поворота тела, [φ] = рад; • Угловая скорость, ω — определяет изменение угла поворота в единицу времени, [ω] = рад/с. • Иногда для оценки быстроты вращения используют угловую частоту вращения n, которая оценивается в оборотах в минуту.
![• Изменение угловой скорости во времени определяется угловым ускорением ε, [ε] = рад/с2](https://present5.com/presentation/63263628_346205858/image-12.jpg "• Изменение угловой скорости во времени определяется угловым ускорением ε, [ε] = рад/с2") • Изменение угловой скорости во времени определяется угловым ускорением ε, [ε] = рад/с2 2. 5. 1 Равномерное вращение ω = const. Уравнение (закон) равномерного вращения: φ = φ0 + t, где φ0 — угол поворота до начала отсчета. Кинематические графики:
• Изменение угловой скорости во времени определяется угловым ускорением ε, [ε] = рад/с2 2. 5. 1 Равномерное вращение ω = const. Уравнение (закон) равномерного вращения: φ = φ0 + t, где φ0 — угол поворота до начала отсчета. Кинематические графики:
 равнопеременного вращения где ω0") 2. 5. 2 Равнопеременное вращение ε = const. Уравнение (закон) равнопеременного вращения где ω0 — начальная угловая скорость. При ускоренном движении угловая скорость возрастает, при замедленном —убывает. Кинематические графики:
2. 5. 2 Равнопеременное вращение ε = const. Уравнение (закон) равнопеременного вращения где ω0 — начальная угловая скорость. При ускоренном движении угловая скорость возрастает, при замедленном —убывает. Кинематические графики:
 2. 5. 3 Скорости и ускорения точек вращающегося тела Путь точки А: SA = φr. A. Линейная скорость точки А: v. A = ωr. A. Ускорение точки А: at. A = εr. A – касательное; an. A = ω2 r. A - нормальное где r. A - радиус траектории точки А ВИДЕО
2. 5. 3 Скорости и ускорения точек вращающегося тела Путь точки А: SA = φr. A. Линейная скорость точки А: v. A = ωr. A. Ускорение точки А: at. A = εr. A – касательное; an. A = ω2 r. A - нормальное где r. A - радиус траектории точки А ВИДЕО
 2. 6 Сложное движение точки, тела Раскладывается на несколько простых (простыми считают поступательное и вращательное) Рассматриваются две системы отсчёта: подвижная и неподвижная Пример: Два стрелка неподвижны относительно друга, но движутся, если рассматривать другие системы отсчёта.
2. 6 Сложное движение точки, тела Раскладывается на несколько простых (простыми считают поступательное и вращательное) Рассматриваются две системы отсчёта: подвижная и неподвижная Пример: Два стрелка неподвижны относительно друга, но движутся, если рассматривать другие системы отсчёта.
 Абсолютное движение – в неподвижной системе координат Относительное движение – в подвижной системе координат Переносное движение – подвижная с. к. двигается в неподвижной с. к. Абсолютный путь точки равен векторной сумме пути относительного и переносного движения
Абсолютное движение – в неподвижной системе координат Относительное движение – в подвижной системе координат Переносное движение – подвижная с. к. двигается в неподвижной с. к. Абсолютный путь точки равен векторной сумме пути относительного и переносного движения
 Теорема 1. Абсолютная скорость точки в сложном движении равна векторной сумме ее относительной и переносной скоростей. va=vr+ve или v 2=ve 2+vr 2+2 vevr cos - угол между векторами ve и vr
Теорема 1. Абсолютная скорость точки в сложном движении равна векторной сумме ее относительной и переносной скоростей. va=vr+ve или v 2=ve 2+vr 2+2 vevr cos - угол между векторами ve и vr
. Абсолютное ускорение точки при непоступательном переносном движении равно векторной сумме") Теорема 2 (теорема Кориолиса). Абсолютное ускорение точки при непоступательном переносном движении равно векторной сумме трех ускорений – относительного, переносного и поворотного (кориолисова). aa=ar+ae+ac
Теорема 2 (теорема Кориолиса). Абсолютное ускорение точки при непоступательном переносном движении равно векторной сумме трех ускорений – относительного, переносного и поворотного (кориолисова). aa=ar+ae+ac
 2. 7 Плоское движение твёрдого тела 1. Для описания плоского движения тел достаточно описать движение точек одного сечения тела плоскостью, параллельной неподвижной плоскости. 2. Плоское движение тела может рассматриваться как результат сложения поступательного движения и вращения тела относительно одной из точек тела, называемой полюсом.
2. 7 Плоское движение твёрдого тела 1. Для описания плоского движения тел достаточно описать движение точек одного сечения тела плоскостью, параллельной неподвижной плоскости. 2. Плоское движение тела может рассматриваться как результат сложения поступательного движения и вращения тела относительно одной из точек тела, называемой полюсом.
 3. Характеристики вращательного движения тела при его плоском движении не зависят от выбора полюса. За полюс можно принимать любую точку тела. Теорема: Скорость любой точки тела B при плоском движении равна геометрической сумме скорости полюса A и скорости во вращении точки B относительно полюса A. где – угловая скорость вращения точки В вокруг полюса А, АВ – расстояние между данной точкой и полюсом (радиус вращения)
3. Характеристики вращательного движения тела при его плоском движении не зависят от выбора полюса. За полюс можно принимать любую точку тела. Теорема: Скорость любой точки тела B при плоском движении равна геометрической сумме скорости полюса A и скорости во вращении точки B относительно полюса A. где – угловая скорость вращения точки В вокруг полюса А, АВ – расстояние между данной точкой и полюсом (радиус вращения)
 Ускорение любой точки тела В при плоском движении равно геометрической сумме ускорения полюса А и ускорения во вращении точки В относительно полюса А. вращательное осестремительное (центростремительное)
Ускорение любой точки тела В при плоском движении равно геометрической сумме ускорения полюса А и ускорения во вращении точки В относительно полюса А. вращательное осестремительное (центростремительное)
 В любой момент непоступательного движения плоской фигуры на плоскости, связанной с фигурой, существует точка, скорость которой равна нулю. Эта точка – мгновенный центр скоростей Вокруг МЦС тело совершает поворот со скоростью Учебный фильм
В любой момент непоступательного движения плоской фигуры на плоскости, связанной с фигурой, существует точка, скорость которой равна нулю. Эта точка – мгновенный центр скоростей Вокруг МЦС тело совершает поворот со скоростью Учебный фильм
 Способы нахождения мгновенного центра скоростей 1. Известны направления скоростей двух точек тела, и они не параллельны. Мгновенный центр скоростей лежит на пересечении перпендикуляров к скоростям
Способы нахождения мгновенного центра скоростей 1. Известны направления скоростей двух точек тела, и они не параллельны. Мгновенный центр скоростей лежит на пересечении перпендикуляров к скоростям
 2. Перпендикуляры к скоростям двух точек тела совпадают. Мгновенный центр скоростей находится из условия пропорциональности скоростей расстояниям до этого центра
2. Перпендикуляры к скоростям двух точек тела совпадают. Мгновенный центр скоростей находится из условия пропорциональности скоростей расстояниям до этого центра
 3. Скорости двух точек тела параллельны, а перпендикуляры к ним не совпадают. Тело совершает мгновенно-поступательное движение. v. A = v. B, мгновенный центр скоростей не существует.
3. Скорости двух точек тела параллельны, а перпендикуляры к ним не совпадают. Тело совершает мгновенно-поступательное движение. v. A = v. B, мгновенный центр скоростей не существует.
 4. Качение без скольжения по неподвижной поверхности. Мгновенный центр скоростей находится в точке касания тела с неподвижной поверхностью.
4. Качение без скольжения по неподвижной поверхности. Мгновенный центр скоростей находится в точке касания тела с неподвижной поверхностью.
 на плоскости,") В любой момент движения плоской фигуры (за исключением случая ее поступательного движения) на плоскости, связанной с фигурой, существует точка, ускорение которой равно нулю. Точку эту называют мгновенным центром ускорений • Движение по окружности (фильм)
В любой момент движения плоской фигуры (за исключением случая ее поступательного движения) на плоскости, связанной с фигурой, существует точка, ускорение которой равно нулю. Точку эту называют мгновенным центром ускорений • Движение по окружности (фильм)