

 МЕТОД СИЛ Тема 14
МЕТОД СИЛ Тема 14
 Метод сил заключается в том, что заданная статически неопределимая система освобождается от дополнительных связей как внешних, так и взаимных, а их действие заменяется силами и моментами. Величина их в дальнейшем подбирается так, чтобы перемещения в системе соответствовали тем ограничениям, которые накладываются на систему отброшенными связями. Таким образом, при указанном способе решения неизвестными оказываются силы. Отсюда и название «метод сил» . Итак, раскрытие статической неопределимости любой рамы методом сил начинается с отбрасывания дополнительных связей. Система, освобожденная от дополнительных связей, становится статически определимой. Она носит название основной системы.
Метод сил заключается в том, что заданная статически неопределимая система освобождается от дополнительных связей как внешних, так и взаимных, а их действие заменяется силами и моментами. Величина их в дальнейшем подбирается так, чтобы перемещения в системе соответствовали тем ограничениям, которые накладываются на систему отброшенными связями. Таким образом, при указанном способе решения неизвестными оказываются силы. Отсюда и название «метод сил» . Итак, раскрытие статической неопределимости любой рамы методом сил начинается с отбрасывания дополнительных связей. Система, освобожденная от дополнительных связей, становится статически определимой. Она носит название основной системы.
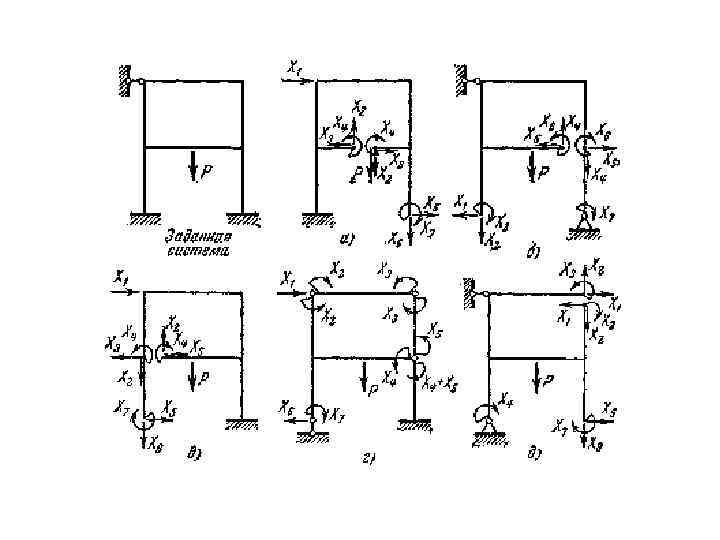
 Для каждой статически неопределимой стержневой системы можно подобрать, как правило, сколько угодно основных систем. Например, для рамы, показанной на рис. , можно предложить основные системы, а), б), . . . , которые получены путем отбрасывания семи дополнительных связей в различных комбинациях.
Для каждой статически неопределимой стержневой системы можно подобрать, как правило, сколько угодно основных систем. Например, для рамы, показанной на рис. , можно предложить основные системы, а), б), . . . , которые получены путем отбрасывания семи дополнительных связей в различных комбинациях.
 . Вместе с тем нужно помнить, что не всякая система с семью отброшенными связями может быть принята как основная. На рис. показано три примера для той же рамы, в которой также отброшено семь связей, однако сделано это неправильно, так как оставшиеся связи не обеспечивают кинематической неизменяемости системы, с одной стороны, и статической определимости во всех узлах, — с другой.
. Вместе с тем нужно помнить, что не всякая система с семью отброшенными связями может быть принята как основная. На рис. показано три примера для той же рамы, в которой также отброшено семь связей, однако сделано это неправильно, так как оставшиеся связи не обеспечивают кинематической неизменяемости системы, с одной стороны, и статической определимости во всех узлах, — с другой.
 После того как дополнительные связи отброшены и система превращена в статически определимую, необходимо, как уже говорилось, ввести вместо связей неизвестные силовые факторы. В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты. Как в том, так и в другом случае неизвестные силовые факторы будем обозначать Xi-, где i — номер неизвестного. Наибольшее значение i равно степени статической неопределимости системы. Заметим, что для внутренних связей силы Xi, — являются взаимными. Если в каком-либо сечении рама разрезана, то равные и противоположные другу силы и моменты прикладываются как к правой, так и к левой частям системы. Основная система, к которой приложены все внешние заданные силы и неизвестные силовые факторы, носит название эквивалентной системы. На следующем слайде показано пять эквивалентных систем, которые соответствуют приведенным выше основным системам. Принцип приложения неизвестных силовых факторов становится ясным без дальнейших пояснений.
После того как дополнительные связи отброшены и система превращена в статически определимую, необходимо, как уже говорилось, ввести вместо связей неизвестные силовые факторы. В тех сечениях, где запрещены линейные перемещения, вводятся силы. Там, где запрещены угловые смещения, вводятся моменты. Как в том, так и в другом случае неизвестные силовые факторы будем обозначать Xi-, где i — номер неизвестного. Наибольшее значение i равно степени статической неопределимости системы. Заметим, что для внутренних связей силы Xi, — являются взаимными. Если в каком-либо сечении рама разрезана, то равные и противоположные другу силы и моменты прикладываются как к правой, так и к левой частям системы. Основная система, к которой приложены все внешние заданные силы и неизвестные силовые факторы, носит название эквивалентной системы. На следующем слайде показано пять эквивалентных систем, которые соответствуют приведенным выше основным системам. Принцип приложения неизвестных силовых факторов становится ясным без дальнейших пояснений.
 Теперь остается составить уравнения для определения неизвестных. Обратимся к некоторому конкретному примеру. Перейдем теперь к составлению уравнений для определения неизвестных силовых факторов. Условимся через δik обозначать взаимное смещение точек системы. Первый индекс соответствует направлению перемещения, а второй — силе, вызвавшей это перемещение. В рассматриваемой раме в точке А отброшена неподвижная опора. Следовательно, горизонтальное перемещение здесь равно нулю и можно записать: Индекс 1 означает, что речь идет о перемещении по направлению силы Х 1, а индекс [Х 1, Х 2, . . . , Р] показывает, что перемещение определяется суммой всех сил, как заданных, так и неизвестных.
Теперь остается составить уравнения для определения неизвестных. Обратимся к некоторому конкретному примеру. Перейдем теперь к составлению уравнений для определения неизвестных силовых факторов. Условимся через δik обозначать взаимное смещение точек системы. Первый индекс соответствует направлению перемещения, а второй — силе, вызвавшей это перемещение. В рассматриваемой раме в точке А отброшена неподвижная опора. Следовательно, горизонтальное перемещение здесь равно нулю и можно записать: Индекс 1 означает, что речь идет о перемещении по направлению силы Х 1, а индекс [Х 1, Х 2, . . . , Р] показывает, что перемещение определяется суммой всех сил, как заданных, так и неизвестных.
 Аналогично можно записать: Так как под величиной δпонимается взаимное смещение точек, то δ 2 обозначает вертикальное смещение точки В относительно С, δ 3 — горизонтальное взаимное смещение тех же точек, δ 4 есть взаимное угловое смещение сечений В и С. Пользуясь принципом независимости действия сил, раскроем выражения для перемещений Аналогичным образом запишем и остальные пять уравнений: каждое из слагаемых, входящих в уравнение, обозначает перемещение в направлении силы с первым индексом под действием силы, стоящей во втором индексе. Поскольку каждое перемещение пропорционально соответствующей силе, величину можно записать в следующем виде:
Аналогично можно записать: Так как под величиной δпонимается взаимное смещение точек, то δ 2 обозначает вертикальное смещение точки В относительно С, δ 3 — горизонтальное взаимное смещение тех же точек, δ 4 есть взаимное угловое смещение сечений В и С. Пользуясь принципом независимости действия сил, раскроем выражения для перемещений Аналогичным образом запишем и остальные пять уравнений: каждое из слагаемых, входящих в уравнение, обозначает перемещение в направлении силы с первым индексом под действием силы, стоящей во втором индексе. Поскольку каждое перемещение пропорционально соответствующей силе, величину можно записать в следующем виде:
 Что касается перемещений δ 1 P, δ 2 P , и т. д. , то под индексом Р будем понимать не просто внешнюю силу Р, а вообще систему внешних сил, которая может быть произвольной. Поэтому эти величины в уравнениях оставим неизменными. Теперь уравнения примут вид: Эти уравнения являются окончательными и носят название канонических уравнений метода сил. Число их равно степени статической неопределимости системы. Коэффициент δik -- это есть перемещение по направлению i-го силового фактора под действием единичного фактора, заменяющего k-й фактор.
Что касается перемещений δ 1 P, δ 2 P , и т. д. , то под индексом Р будем понимать не просто внешнюю силу Р, а вообще систему внешних сил, которая может быть произвольной. Поэтому эти величины в уравнениях оставим неизменными. Теперь уравнения примут вид: Эти уравнения являются окончательными и носят название канонических уравнений метода сил. Число их равно степени статической неопределимости системы. Коэффициент δik -- это есть перемещение по направлению i-го силового фактора под действием единичного фактора, заменяющего k-й фактор.
 Например, коэффициент δ 31 уравнения представляет собой взаимное горизонтальное смещение точек B и С, которое возникло бы в раме, если бы к ней вместо всех сил была приложена только единичная сила в точке А (рис. а). Если, например, вместо сил Х 2, приложить единичные силы, а все прочие силы с эквивалентной системы снять (рис. б), то угол поворота в сечении D под действием этих сил будет δ 72 , горизонтальное перемещение в точке А будет δ 12 и т. д.
Например, коэффициент δ 31 уравнения представляет собой взаимное горизонтальное смещение точек B и С, которое возникло бы в раме, если бы к ней вместо всех сил была приложена только единичная сила в точке А (рис. а). Если, например, вместо сил Х 2, приложить единичные силы, а все прочие силы с эквивалентной системы снять (рис. б), то угол поворота в сечении D под действием этих сил будет δ 72 , горизонтальное перемещение в точке А будет δ 12 и т. д.
 Для того чтобы определить величину δik , следует вместо внешних сил рассматривать единичную силу, заменяющую k-й фактор. В итоге получим: где , - внутренние моменты и силы, возникающие под действием i-го единичного фактора. Таким образом, коэффициенты δik получаются как результат перемножения i-го и k-го внутренних единичных силовых факторов. Если рама состоит из прямых участков и можно пользоваться правилом Верещагина, то δik представляет собой результат перемножения i-х единичных эпюр на k-е единичные эпюры. Величины δi. Р , входящие в канонические уравнения, представляют собой перемещения в направлениях 1, 2, . . . , возникающие под действием заданных внешних сил в эквивалентной системе. Они определяются перемножением эпюры моментов заданных сил на соответствующие единичные эпюры.
Для того чтобы определить величину δik , следует вместо внешних сил рассматривать единичную силу, заменяющую k-й фактор. В итоге получим: где , - внутренние моменты и силы, возникающие под действием i-го единичного фактора. Таким образом, коэффициенты δik получаются как результат перемножения i-го и k-го внутренних единичных силовых факторов. Если рама состоит из прямых участков и можно пользоваться правилом Верещагина, то δik представляет собой результат перемножения i-х единичных эпюр на k-е единичные эпюры. Величины δi. Р , входящие в канонические уравнения, представляют собой перемещения в направлениях 1, 2, . . . , возникающие под действием заданных внешних сил в эквивалентной системе. Они определяются перемножением эпюры моментов заданных сил на соответствующие единичные эпюры.
 Пример расчета • • • Раскрыть статическую неопределимость и построить эпюру изгибающих моментов для рамы, показанной на рис. Рама три раза статически неопределима. Выбираем основную систему, отбрасывая левую заделку. Действие заделки заменяем двумя силами Х 1, Х 2, и моментом Х 3 и определяем эквивалентную систему. Канонические уравнения принимают для рассматриваемой системы такой вид:
Пример расчета • • • Раскрыть статическую неопределимость и построить эпюру изгибающих моментов для рамы, показанной на рис. Рама три раза статически неопределима. Выбираем основную систему, отбрасывая левую заделку. Действие заделки заменяем двумя силами Х 1, Х 2, и моментом Х 3 и определяем эквивалентную систему. Канонические уравнения принимают для рассматриваемой системы такой вид:
 Основные перемещения в рассматриваем ой раме определяются изгибом. Поэтому, пренебрегая сдвигом и сжатием стержней, строим эпюры изгибающих моментов от заданной силы P и от трех единичных силовых факторов.
Основные перемещения в рассматриваем ой раме определяются изгибом. Поэтому, пренебрегая сдвигом и сжатием стержней, строим эпюры изгибающих моментов от заданной силы P и от трех единичных силовых факторов.
 Определяем коэффициенты уравнений, считая, что жесткость на изгиб всех участков рамы постоянна и равна EJ. Величина δ 11 определяется перемножением первой единичной эпюры самой на себя. Для каждого участка берется, следовательно, площадь эпюры и умножается на ординату этой же эпюры, проходящую через ее центр тяжести: Определяем, далее, и остальные коэффициенты уравнений, перемножая эпюры с соответствующими номерами:
Определяем коэффициенты уравнений, считая, что жесткость на изгиб всех участков рамы постоянна и равна EJ. Величина δ 11 определяется перемножением первой единичной эпюры самой на себя. Для каждого участка берется, следовательно, площадь эпюры и умножается на ординату этой же эпюры, проходящую через ее центр тяжести: Определяем, далее, и остальные коэффициенты уравнений, перемножая эпюры с соответствующими номерами:
 Подставляем найденные коэффициенты в канонические уравнения. После сокращений получаем: Решая эти уравнения, находим: Раскрытие статической неопределимости на этом заканчивается.
Подставляем найденные коэффициенты в канонические уравнения. После сокращений получаем: Решая эти уравнения, находим: Раскрытие статической неопределимости на этом заканчивается.
 Эпюра изгибающих моментов может быть получена наложением на эпюру моментов заданных сил трех единичных эпюр, увеличенных соответственно в Х 1, Х 2, и Х 3 раза. Суммарная эпюра изгибающих моментов представлена на рис. Там же пунктиром показана изогнутая линия рамы.
Эпюра изгибающих моментов может быть получена наложением на эпюру моментов заданных сил трех единичных эпюр, увеличенных соответственно в Х 1, Х 2, и Х 3 раза. Суммарная эпюра изгибающих моментов представлена на рис. Там же пунктиром показана изогнутая линия рамы.